PEMBUATAN ALAT UKUR KECEPATAN RAMBAT BUNYI
DI UDARA DENGAN METODE QUINCKE
Fajar Ardhi Haqi, Prawito, Arief Sudarmaji
Departemen Fisika, Pasca Sarjana FMIPA UI, Kampus UI Depok 16424 [email protected]
ABSTRAK
Sebuah Sistem Berbasis Mikrokontroler untuk mengukur cepat rambat bunyi di udara berbasis metode Quincke sudah dibuat. sebuah sumber sinyal listrik sinusoida dengan frekuensi yang dapat diatur, digunakan sebagai sumber gelombang bunyi melalui sebuah speaker. Salah satu tabung pada sistem ini dapat digeser maju atau mundur untuk mengatur beda lintasan antara dua buah gelombang yang berinterferensi. Hasil interferensi di monitor oleh sebuah mikrofon. Keseluruhan proses pengaturan dan pengambilan data dilakukan oleh mikrokontroler, yang dihubungkan dengan sebuah komputer untuk menampilkan grafik hasil eksperimen. Grafik eksperimen tersebut dibuat plot dengan software LabView dan software tersebut sekaligus sebagai antar muka antara sistem dengan komputer.
Kata kunci: frekuensi; gelombang; generator sinus; mikrokontroler; Quincke.
ABSTRACT
Microcontroller based instrumentation system for measuring wave speed of the waves in the air has been built. This system is designed based on Quincke experiment. A frequency controllable sinusoida electrical signal source is used as sound wave generator through a speaker. One of the pipes in the system can be shifted forward or backward to set the path difference between the two interfering sound waves. The result of interference is monitored by using a microphone. All of the control processes and data acquisition is executed by a microcontroller, which is connected to computer for displaying the result of the experiment. Graphs plot experiments were made with LabView software and software as well as an interface between the computer system
Keywords: frequency; microcontroller; sine generator; Quincke; wave I. PENDAHULUAN
Ada beberapa cara atau metode untuk menentukan kecepatan rambat bunyi di udara. Diantaranya adalah dengan melakukan getaran bunyi dengan sehelai dawai yang ditegangkan dengan menggunakan beban variabel. Apabila dawai tersebut dipetik dibagian tengah, maka seluruh dawai akan bergetar membentuk setengah panjang gelombang. Lalu dengan Peristiwa resonansi merupakan peristiwa bergetarnya suatu sistem fisis dengan nilai frekuensi tertentu akibat dipengaruhi oleh sistem fisis lain (sumber) yang bergetar dengan frekuensi tertentu
pula dimana nilai kedua frekuensi ini adalah sama. Peristiwa ini dapat kita amati dengan menggunakan kolom udara. Kolom udara dapat dibuat dengan menggunakan tabung yang sebagian diisi air, sehingga kita dapat mengatur panjang kolom udara dengan menaik-turunkan pemukaan air pada tabung
Pada Umumnya semua eksperimen tersebut dilakukan secara manual. Pada penelitian metode eksperimen Quincke digunakan sebagai dasar acuan pembuatan sistem instrumentasi untuk mengukur cepat rambat gelombang bunyi di udara. Frekuensi gelombang yang dilakukannya pun dapat dipilih secara otomatis, begitu juga interferensi maksimum maupun minimumnya yang dapat dideteksi secara otomatis ,sehingga dibutuhkan sistem kontrol yang dapat melakukan proses-proses tersebut secara cepat dan akurat.
Didukung oleh permasalahan yang telah dijelaskan, informasi untuk menjawabnya secara sistematis dan dapat dibuktikan secara ilmiah. Untuk itu, penulis mencoba mengangkat masalah tersebut dalam tugas akhir yang berjudul PEMBUATAN ALAT UKUR KECEPATAN RAMBAT BUNYI DI UDARA DENGAN METODE QUINCKE. Dengan penggunaan metode ini diharapkan kebenaran teori fisika tentang proses intenferensi bunyi dalam gelombang bisa mendapatkan hasil yang presisi dan akurat.
2. TINJAUAN TEORITIS
Suara dihasilkan oleh getaran pada suatu benda. Selama bergetar, perbedaan tekanan terjadi di udara sekitarnya. Pola osilasi yang terjadi dinamakan sebagai “Gelombang”. Gelombang mempunyai pola sama yang berulang pada interval tertentu, yang disebut sebagai “Periode”. Contoh suara periodik : instrument musik, nyanyian burung, dll dan contoh suara nonperiodik : batuk, percikan ombak, dll.
Berdasarkan frekuensinya, suara dibagi menjadi 4, yaitu : 1. Infrasound = 0Hz – 20 Hz
2. Pendengaran manusia = 20Hz – 20 KHz 3. Ultrasound = 20KHz – 1 GHz
4. Hypersound = 1GHz – 10 THz
Manusia membuat suara dengan frekuensi : 50Hz – 10KHz. Sinyal suara musik memiliki frekuensi : 20Hz – 20Khz. Maka Sistem multimedia menggunakan suara yang berada dalam range pendengaran manusia. Suara yang berada pada range pendengaran
manusia sebagai “Audio” dan gelombangnya sebagai “Accoustic Sinyal”. Suara diluar range pendengaran manusia dapat dikatakan sebagai “Noise” (getaran yang tidak teratur dan tidak berurutan dalam berbagai frekuensi, tidak dapat didengar manusia).
Dapat kita ketahui pengertian dari bagian-bagian bunyi itu sendiri: 1 . Amplitudo
- Keras lemahnya bunyi atau tinggi rendahnya gelombang. - Satuan amplitudo adalah decibel (db)
- Bunyi mulai dapat merusak telinga jika tingkat volumenya lebih besar dari 85 dB dan pada ukuran 130 dB akan mampu membuat hancur gendang telinga
2. Velocity
-Kecepatan perambatan gelombang bunyi sampai ke telinga pendengar. -Satuan yang digunakan : m/s
-Pada udara kering dengan suhu 20 °C (68 °F)m kecepatan rambat suara sekitar 340 m/s.
a. Teori Umum Gelombang
Gelombang adalah suatu getaran yang merambat, dalam perambatannya gelombang membawa energi. Dengan kata lain, gelombang merupakan getaran yang merambat dan getaran sendiri merupakan sumber gelombang. Jadi, gelombang adalah getaran yang merambat dan gelombang yang bergerak akan merambatkan energi (tenaga).
b. Jenis gelombang
Ada beberapa contoh gelombang yang kita temui dalam kehidupan sehari-hari. Walaupun terdapat banyak contoh gelombang dalam kehidupan kita, secara umum hanya terdapat dua jenis gelombang saja, yakni gelombang mekanik dan gelombang
elektromagnetik. Pembagian jenis gelombang ini didasarkan pada medium perambatan
gelombang.
1. Gelombang mekanik, yaitu gelombang yang perantaranya butuh medium. Misalnya:
gelombang air, gelombang bunyi, gelombang slinki, gelombang bunyi, gelombang permukaan air, dan gelombang pada tali.
2. Gelombang elektromagnetik, yaitu gelombang yang perambatannya tidak memerlukan
medium. Misalnya gelombang cahaya, cahaya, sinar ultra violet, infra merah, gelombang radar, gelombang radio, gelombang TV, sinar – X, dan sinar gamma (γ) Sedangkan
berdasarkan arah rambatan dan getarannya, dibagi menjadi dua, yaitu gelombang transversal dan longitudinal.
c. Arah Rambat Gelombang
Untuk pembagian jenis gelombang berdasarkan arah rambat gelombang, yang umum diketahui yaitu pada gelombang transversal dan gelombang longitudinal.
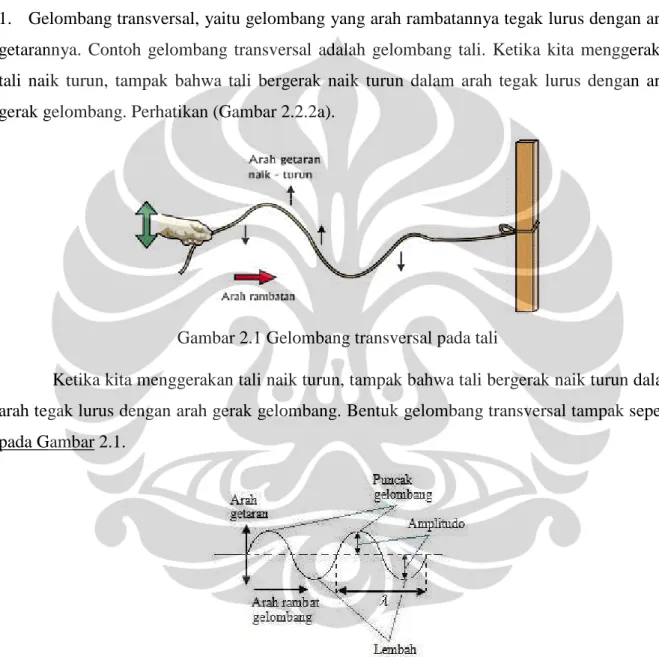
1. Gelombang transversal, yaitu gelombang yang arah rambatannya tegak lurus dengan arah
getarannya. Contoh gelombang transversal adalah gelombang tali. Ketika kita menggerakan tali naik turun, tampak bahwa tali bergerak naik turun dalam arah tegak lurus dengan arah gerak gelombang. Perhatikan (Gambar 2.2.2a).
Gambar 2.1 Gelombang transversal pada tali
Ketika kita menggerakan tali naik turun, tampak bahwa tali bergerak naik turun dalam arah tegak lurus dengan arah gerak gelombang. Bentuk gelombang transversal tampak seperti pada Gambar 2.1.
Gambar 2.2 Bentuk gelombang Tranversal pada tali
Pada Gambar 2.2 tampak bahwa gelombang merambat ke kanan pada bidang horisontal, sedangkan arah getaran naik-turun pada bidang vertikal. Garis putus-putus yang digambarkan di tengah sepanjang arah rambat gelombang menyatakan posisi setimbang medium (misalnya tali atau air). Titik tertinggi gelombang disebut puncak sedangkan titik
terendah disebut lembah. Amplitudo adalah ketinggian maksimum puncak atau kedalaman maksimum lembah, diukur dari posisi setimbang. Jarak dari dua titik yang sama dan berurutan pada gelombang disebut panjang gelombang (disebut lambda – huruf Yunani). Panjang gelombang juga bisa juga dianggap sebagai jarak dari puncak ke puncak atau jarak dari lembah ke lembah.
2. Gelombang longitudinal, yaitu gelombang yang arah rambatannya sejajar dengan arah
getarannya (misalnya gelombang slinki). Gelombang yang terjadi pada slinki yang digetarkan, searah dengan membujurnya slinki berupa rapatan dan regangan. Jarak dua rapatan yang berdekatan atau dua regangan yang berdekatan disebut satu gelombang.
Contoh: getaran sinar gitar yang dipetik, getaran tali yang digoyang-goyangkan pada salah satu ujungnya. (Perhatikan Gambar 2.2.2c).
Gambar 2.3 Gelombang Longitudinal pada slinki
Pada Gambar 2.3 tampak bahwa arah getaran sejajar dengan arah rambatan gelombang. Serangkaian rapatan dan regangan merambat sepanjang pegas. Rapatan merupakan daerah di mana kumparan pegas saling mendekat, sedangkan regangan merupakan daerah di mana kumparan pegas saling menjahui. Jika gelombang tranversal memiliki pola berupa puncak dan lembah, maka gelombang longitudinal terdiri dari pola rapatan dan regangan. Panjang gelombang adalah jarak antara rapatan yang berurutan atau regangan yang berurutan. Yang dimaksudkan di sini adalah jarak dari dua titik yang sama dan berurutan pada rapatan atau regangan.
Salah satu contoh gelombang logitudinal adalah gelombang suara di udara. Udara sebagai medium perambatan gelombang suara, merapat dan meregang sepanjang arah rambat gelombang udara.
a. Metode Quincke
Metode Quincke atau eksperimen Quincke merupakan metode yang penguatan dan pelemahan gelombang terjadi akibat interferensi dua gelombang yang sefase. Jika interferensi terjadi antara gelombang yang memiliki frekuensi yang sama, namun arah simpangannya berlawanan maka dihasilkan penghilangan gelombang. Jika interferensi terjadi antara gelombang yang tidak memiliki frekuensi gelombang yang sama maka akan terjadi gelombang yang baru dengan frekuensi yang telah bergeser. Pergeseran frekuensi inilah yang menyebabkan bunyi yang terdengar tidak sama dengan bunyi semula sehingga timbul dengung. Misalnya ada dua sumber bunyi yang masing-masing menghasilkan gelombang berfase sama dan mempunya simpangan yang sama.Kedua sumber tersebut diletakkan sedemikian rupa sehingga jarak antara keduanya
Gambar. 2.4 Teori singkat metode quincke [5]
Konstruksi mekanik pada metode Quincke (Gambar 2.4) diatas merupakan gambaran dari suatu eksperimen quincke yang menjelaskan bahwa input percobaan ini berupa sumber bunyi, yang kemudian akan merambat pada udara di dalam suatu médium pipa dengan dua lintasan yang berbeda. Salah satu lintasan tersebut dapat di atur lintasannya, lalu kedua
lintasan tersebut menghasilkan gelombang bunyi yang berbeda dikarenakan adanya perbedaan bunyi dari lintasan pertama dan lintasan kedua. Hasil perbedaan lintasan tersebut dinamakan interferensi, pada mikrofon pendeteksi interferensi kedua gelombang tersebut dapat diketahui gelombang yang dihasilkan karena perbedaan lintasan. Apabila membran bergetar cukup kuat, maka terjadi interferensi konstruktif (saling menguatkan), sebaliknya jika getaran pada membran itu kecil atau tidak bergetar maka terjadi interferensi destruktif (saling meniadakan)
3. METODE PENELITIAN
a. Perancangan Mekanik
Dalam bab ini akan dibahas mengenai perancangan sistem beserta cara kerja dari tiap-tiap elemen sistem: konstruksi mekanik, rangkaian elektronik, dan logika program, yang digunakan untuk mewujudkan dalam “Pembuatan Alat Ukur Kecepetan Rambat Gelombang Di Udara Dengan Metode Quincke”.
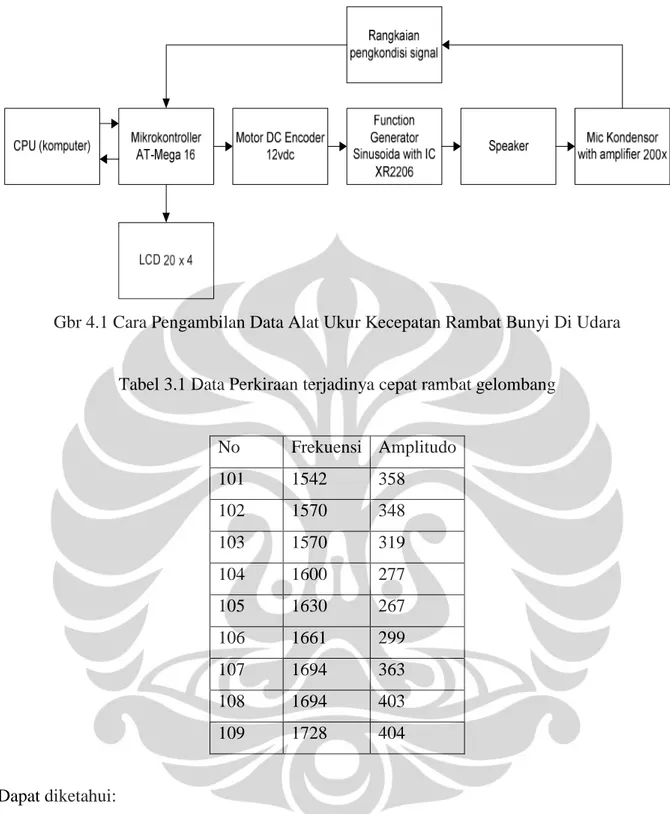
Blok diagram diatas merupakan simulasi dari cara kerja alat ukur kecepatan rambat bunyi di udara, dimana sistem menggunakan motor encoder sebagai penggerak lintasan tabung tembaga dan genearator sinus sebagai pembangkit gelombang sinus terhadap speaker dan mikrophone sebagai penerima suara, metode quincke sebagai acuan mekaniknya, dan mikrokontroler sebagai pengontrol cara kerja alat.
Gbr 3.2 Perancangan Mekanik Alat Ukur Kecepatan Rambat Bunyi
Sebagai aliran gelombang frekuensi dalam percobaan ini saya menggunakan sebuah tabung tembaga berukuran dengan panjang 30 cm dan beridameter 1 mm. lalu sebagai penghubung antara sumber dan penerima gelombang suara menggunakan penghubung tembaga-T. dan pada bagian lintasan yang dapat diatur, dibuat sedemikian rupa agar pipa dapat memanjang dan memendek dengan baik. Pada pembuatan lintasan 1 dan lintasan 2 (lintasan dapat diatur), perbandingan yang dipergunakan 1 : 2 atau kisaran 10 cm dan 20 cm. Perbandingan itu dimaksudkan agar lintasan (∆T) dapat diatur sedemikian rupa, dan menghasilkan interferensi yang baik.
Rangkaian sensor suara merupakan rangkaian 100x untuk memperkuat suara
merupakan modul sensor gelombang suara yang sanga
bunyi,
Gbr
merupakan rangkaian mickondensor dengan
100x untuk memperkuat suara yang diterima pada mic konduser, dan analog sound ini
n modul sensor gelombang suara yang sangat sensitive sebagai penerima gelombang
Gbr 3.3 Skematik Sensor mikrofon
dengan penguatan opamp
yang diterima pada mic konduser, dan analog sound ini penerima gelombang
Gbr
Didukung dengan rangkaian elektronik lainnya meliputi rangkaian amplifier dan function generator sebagai pembangkit pulsa sinus sebagai input speaker. Sehingga menimbulkan sumber bunyi yang digunakan menentukan cepat rambat bunyi di udara.selain
itu terdapat rangkaian presisi rectifier sebagai konversi tegangan analog menjadi tegangan
digital.
Dalam proses pembuatan model alat dibuat suatu sistem pengontrolan untuk pengotomatisan gerak motor
Rangkaian minimum sistem ini terdiri dari rangkaian chip mikrokontroler AVR Atmega dan ISP programmer, kristal, 4 buah header yang terhubung ke port I/O
Rangkaian ini berisi program dari software yang telah didownload ke dalam chip Atmega
Gbr 3.5 Skematik minimum sistem kontrol AT Gbr 3.4 Skematik Sistem Elektronika
Didukung dengan rangkaian elektronik lainnya meliputi rangkaian amplifier dan function generator sebagai pembangkit pulsa sinus sebagai input speaker. Sehingga menimbulkan sumber bunyi yang digunakan menentukan cepat rambat bunyi di udara.selain at rangkaian presisi rectifier sebagai konversi tegangan analog menjadi tegangan
Dalam proses pembuatan model alat dibuat suatu sistem pengontrolan untuk
pengotomatisan gerak motor encoder, yaitu dengan IC mikrokontroller AVR Atmega
an minimum sistem ini terdiri dari rangkaian chip mikrokontroler AVR Atmega
dan ISP programmer, kristal, 4 buah header yang terhubung ke port I/O-nya mikrokontroler.
Rangkaian ini berisi program dari software yang telah didownload ke dalam chip Atmega
Skematik minimum sistem kontrol AT-Mega 16
Didukung dengan rangkaian elektronik lainnya meliputi rangkaian amplifier dan function generator sebagai pembangkit pulsa sinus sebagai input speaker. Sehingga menimbulkan sumber bunyi yang digunakan menentukan cepat rambat bunyi di udara.selain at rangkaian presisi rectifier sebagai konversi tegangan analog menjadi tegangan
Dalam proses pembuatan model alat dibuat suatu sistem pengontrolan untuk
, yaitu dengan IC mikrokontroller AVR Atmega-16 .
an minimum sistem ini terdiri dari rangkaian chip mikrokontroler AVR Atmega-16
nya mikrokontroler.
Rangkaian ini berisi program dari software yang telah didownload ke dalam chip Atmega-16.
Port yang digunakan dalam penggunaan cara kerja alat pada mikrokontroler Atmega16 adalah PortA untuk output sensor mikrofon, PortB untuk membaca output LCD, PortD.7 dan PortD.6 untuk output motor encoder, serta input portD.4,portD5 sebagai pwm untuk push button, PortD.3 dan D.2 untuk tombol reset manual.
c. Perancangan Software
Program BASCOM-AVR
Perancangan sistem ini tidak hanya memiliki hardware saja tetapi system pengendalian yang juga menggunakan software. Software yang digunakan yaitu BASCOM-AVR dengan chip mikrokontroler Atmega- Mega 16.
Program ini diawali dengan inisialisasi port-port pada mikrokontroler yang digunakan, lalu saat penekanan tombol start pada alat ditekan maka ia akan berfungsi sebagai berikut : 1. Motor Encoder menggerakkan lintasan tabung tembaga , sehingga terdapat pengaturan
maju dan mundur agar didapatkan sebuah beda fase di setiap posisinya.
2. Frekuensi gelombang sinusoida menghasilkan bunyi terhadap speaker lalu melakukan scaning dari frekuensi rendah hingga frekuensi tinggi di tangkap oleh sensor microphone terdeteksi dan di display ke LCD serta LabVIEW.
3. Saat frekuensi sudah mencapai frekuensi tinggi, maka alat akan otomatis berhenti, dan melakukan simpan data dari perbandingan frekuensi dan amplitudo.
Berikut ini adalah flowchart dari program utama sistem alat ukur kecepatan rambat bunyi di udara dengan metode quincke :
Gbr 3.6 Flowchart Program Bascom AVR
Aplikasi LabVIEW
berikut adalah aplikasi LabVIEW yang digunakan untuk menampilkan grafik output perbandingan Frekuensi dan Amplitudo yang dihasilkan dari alat ukur ini.
Gbr 3.7 Front Panel LabVIEW
Gbr 3.8 Blok Diagram LabVIEW
Gbr 4.1 Cara Pengambilan Data Alat Ukur Kecepatan Rambat Bunyi Di Udara
Tabel 3.1 Data Perkiraan terjadinya cepat rambat gelombang
No Frekuensi Amplitudo 101 1542 358 102 1570 348 103 1570 319 104 1600 277 105 1630 267 106 1661 299 107 1694 363 108 1694 403 109 1728 404 Dapat diketahui:
Dari table 3.1 dapat diketahui beda fase X1 = 358 dan beda fase X2 = 404. Sehingga didapatkan:
Rata – rata frekuensi
( 1542 + 1728) / 2 = 1635hz
V = λ . f
V = 0.92 x 1635
V = 1504.2 m/s (simulasi) V = 340 m/s (di udara)
5. PEMBAHASAN
Pengambilan data alat ukur kecepatan rambat bunyi di udara pertama kali, tombol start ditekan. Kemudian mikrokontroller menggerakan motor encoder terhadap lintasan tabung tembaga, setelah itu function generator menghasilkan gelombang sinus dan menghasilkan bunyi pada speaker, bunyi yang telah masuk pada eksperimen dan menghasilkan beda fase tersebut diterima oleh mikrophone dengan penguatan 200x lalu dirubah signal sinusoida oleh pengkondisi signal menjadi sebuah tegangan dc yang dapat terbaca pada ADC mikrokontroller.
Pada perubahan lintasan yang terjadi motor melakukan perintah untuk merubah panjang dan pendek posisi dari lintasan.dalam percobaan tersebut apabila lintasan yang terbentuk sama antara ∆x1 dan ∆x2 maka seharusnya gelombang interferensi sama. perpanjangan lintasan diatur setiap cm sesuai data yang ingin didapatkan dalam percobaan. Proses pengotomatisan alat ini selain sebagai pengontrol cara kerja motor untuk lintasan, juga untuk melakukan perubahan beda fase tersebut. Saat data yang dihasilkan sudah sesuai dengan perintah yang dibuat dalam program BASCOM, dan frekuensi sudah melakukan scaning terhadap mekanik dan di terima oleh mikrophone, maka data interferensi gelombang terlihat pada tampilan LCD. Mikrokontroler secara otomatis akan memerintahkan alat ini berhenti dari kerjanya, dan semua kerja alat kembali ke tempatnya semula seperti sebelum alat diaktifkan.
Sehingga didapat Kesalahan relative
Kr = . . 100% 77%
Kesalahan relative yang cukup besar sekitar 77%. Dikarenakan kesalahan dari karakteristik mikophone yang digunakan dalam percobaan ini tidak sesuai dengan prinsip pada metode
Quincke tersebut. Dan sangat sulit untuk mendapatkan gelombang yang baik untuk percobaan tersebut.
6. KESIMPULAN
1. Kebenaran dari sebuah metode quincke tersebut ternyata dapat dilakukan, dikarenakan adanya beda fase yang terbentuk sehingga didapat kecepatan rambat bunyi. Namun pada percobaan yang saya lakukan, tidak sesuai dengan apa yang telah ada pada metode tersebut dikarenakan kesalahan penggunaan sensor microphone yang mempunyai karakteristik tidak sesuai dengan teori kecepatan bunyi di udara
2. Pembuatan sebuah sistem pengukuran kecepatan rambat bunyi diudara berdasarkan metode Quincke dapat dikerjakan dengan baik.namun tidak didapatkan hasil yang benar dikarenakan karakteristik sensor mikrophone yang terbentuk tidak sesuai dengan prinsip metode quincke dengan V = 2093.92 m/s dengan kesalahan relative sebesar 83%.
3. Pada pengambilan data kalibrasi semua sesuai dengan ketetapan dari rangkaian yang akan dipergunakan dalam percobaan tersebut dan semua sesuai dengan ketetapan kalibrasi.
4. Dari pengambilan data alat ukur kecepatan rambat bunyi saat jarak perpanjangan lintasan 2cm dan frekuensi yang dipergunakan 2Khz didapat f (simulasi) = 1635hz dan
λ = 0.92m sehingga didapat V(simulasi) = 1504.2 m/s,dan V(diudara) = 340 m/s.
7. SARAN
1. Untuk melakukan percobaan ini disarankan agar melihat kembali semua rangkaian dan karakteristik serta memperhitungkan dari segi penggunaan dan fungsi alat yang akan dipergunakan.
2. Pada tiap-tiap tabung tembaga harus lebih diteliti rongga yang terbentuk agar sensitifitas yang terbentuk lebih baik lagi, dan diusahakan tabung berbahan alumunium ringan seperti referensi dan perhitungan. Serta penghitungan antara lintasan 1 dan lintasan 2 diperhatikan panjang lintasan awal dibuat sama.agar dapat mengetahui titik 0 atau awal gelombang.
3. Diusahakan agar sumber bunyi dan si penerima tidak berdekatan dan sumber bunyi tidak terlalu keras suara yang dihasilkan karena akan tertangkap oleh si penerima.sehingga menimbulkan gangguan pada gelombang yang terbentuk atau dapat dibuat peredam dengan membuat sebuah silinder tabung berisi kapas atau bahan peredam suara.
4. Untuk pemakaian alat-alat elektronik yang dipergunakan harus menggunakan komponen yang memiliki sensitifitas yang tinggi serta lebih teliti dalam pengukuran.seperti penggunaan resistor 1%.
8. REFERENSI
[1]. 10-InterferensidanDifraksi.2012. CK-FI112-10.14 www.phys.itb.ac.id/~khbasar/arsip/ 10-Interferensi dan Difraksi
[2]. Brady. Lori A. Application of the Herschel-Quincke Tube Concept to Higher-Order
Acoustic Modes in Two-Dimensional Ducts. Blacksburg, Virginia:1 March 2002.
[3]. Hamidah,Ida.2001.DASAR-DASAR GELOMBANG.JPTM –FPTK UPI Interferensi dan Difraksi.2012. CK-FI112-10.1.http: Teori Interferensi dan difraksi.com/pdf/preview
[4]. Tutorial Fisika. 2012. Kelas XII IPA Semester Ganjil. http://dc310.4shared.com/doc/v_DNgsvz/preview.html
[5]. Hallez, Raphaël. 2001. Investigation Of The Herchel Quincke Tube Concept As A Noise Control Device For Turbofan Engine. Virginia Polytechnic Institute and State University.