i
TUGAS AKHIR
CATU DAYA DIGITAL
BERBASIS MIKROKONTROLER ATMEGA8535
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
oleh:
MARIA RATNA PUSPITA NIM : 085114012
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
DIGITAL POWER SUPPLY
BASED ON MICROCONTROLER ATMEGA8535
Presented as Partial Fulfillment of the Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
MARIA RATNA PUSPITA NIM : 085114012
DEPARTEMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
iii
LEMBAR PERSETUJUAN
TUGAS AKHIR
CATU DAYA DIGITAL
BERBASIS MIKROKONTROLER ATMEGA8535
(DIGITAL POWER SUPPLY
BASED ON MICROCONTROLER ATMEGA8535)
disusun oleh :
MARIA RATNA PUSPITA NIM : 085114012
Telah disetujui oleh :
Pembimbing,
iv
HALAMAN PENGESAHAN
TUGAS AKHIR
CATU DAYA DIGITAL BERBASIS
MIKROKONTROLER ATMEGA8535
Oleh:
Maria Ratna Puspita NIM: 085114012
Telah dipertahankan di depan Panitia Penguji Pada tanggal 28 Februari 2014
Dan dinyatakan memenuhi syarat
Susunan Panitia Penguji
Nama Lengkap Tanda Tangan
Ketua
Sekretaris
Anggota
: Ir. Th. Prima Ari Setiyani, M.T.
: Ir. Tjendro, M.Kom
v
PERNYATAAN KEASLIAN KARYA
“Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini
tidak memuat karya atau bagian karya orang lain,
kecuali yang telah disebutkan dalam kutipan dan daftar pustaka,
sebagaimana layaknya karya ilmiah.”
Yogyakarta, 25 Februari 2014
vi
HALAMAN PERSEMBAHAN
Karya tulis ini keupersembahkan untuk:
Yesus Kristus Gembalaku
Bunda Maria dan Malaikat pelindungku
Kedua Orang tua saya Bapak Suparno dan Mamak
Nurtyas Murwaningsih tercinta
Adik-adiku Johan, Doly, Desy dan Chandra tersayang
Almamaterku Teknik Elektro Universitas Sanata Dharma
‘Penting untuk kamu tahu, apa yang kamu bisa dan apa
yang kamu tidak bisa.
Jika kamu punya kekuatan, pikiran, dan ketekunan.
Kamu akan sukses di akhir’
vii
HALAMAN PERNYATAAN PERSETUJUAN
PUBLIKASI KARYA ILMIAH UNTUK
KEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma : Nama : Maria Ratna Puspita
Nomor Mahasiswa : 085114012
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan Universitas Sanata Dharma karya ilmiah saya yang berjudul :
CATU DAYA DIGITAL BERBASIS
MIKROKONTROLER ATMEGA8535
beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan kepada Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, mengalihkan dalam bentuk media lain, mengelolanya dalam bentuk pangkalan data, mendistribusikan secara terbatas, dan mempublikasikannya di internet atau media lain untuk kepentingan akademis tanpa perlu meminta ijin dari saya maupun memberikan royalty kepada saya selama tetap mencantumkan nama saya sebagai penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya.
Yogyakarta, 25 Februari 2014
viii
INTISARI
Perkembangan teknologi telah maju dengan pesat dalam perkembangan dunia elektronika. Catu daya merupakan hal terpenting dalam sebuah instrumentasi elektronika. Pada umumnya catu daya yang sudah memiliki sumber tegangan keluaran dengan sedikit pilihan.
Catu daya dengan nilai tegangan variable ditampilkan secara digital. Sistem ini akan dikendalikan dengan program pada mikrokontroler dengan mengatur potensiometer digital untuk menghasilkan sumber tegangan yang diharapkan. Sistem ini juga dilengkapi dengan keypad sebagai masukan dan Liquid Crystal Display (LCD) sebagai tampilan sumber tegangan. User memasukan nilai tegangan yang diperlukan dengan menekan tombol pada keypad sehingga keluaran akan sama dengan nilai yang tertampil pada layar LCD.
Alat catu daya digital sudah berhasil dibuat dan bekerja dengan baik. Tegangan keluaran sudah sesuai dengan tegangan masukan.
ix
ABSTRACT
The developing technology has so fast advanced in electronic. The power supply is the most important thing on electronics instrumentation. In general, existing power supply has little choice output voltage source.
Power supply with variable voltage values displayed digitally. This system will controller by program in microcontroller by controlled digital potentiometer to receive voltage sources wanted. This system has completed with keypad as an input and Liquid Crystal Display (LCD) as voltage source display. User input the voltage value needed by pushed the keypad, the output will get value as same as displayed on the LCD.
Digital power supply has been successfully made and ha well done operation. The output voltage got same value with the input voltage.
x
KATA PENGANTAR
Puji dan Syukur penulis panjatkan kepada Tuhan Yesus Kristus karena telah
memberikan berkat-Nya sehingga penulis dapat menyelesaikan laporan akhir ini dengan
baik. Laporan akhir ini disusun untuk memenuhi syarat memperoleh gelar sarjana.
Penulis mengucapkan terima kasih kepada :
1. Paulina Heruningsih Prima Rosa, S.Si., M.Sc., Dekan Fakultas Sains dan Teknologi
Universitas Sanata Dharma Yogyakarta.
2. Petrus Setyo Prabowo, S.T., M.T., Ketua Program Studi Teknik Elektro Universitas
Sanata Dharma Yogyakarta.
3. Ir. Tjendro, M.Kom., dosen pembimbing yang dengan penuh pengertian dan
ketulusan hati memberi bimbingan, kritik, saran, serta motivasi dalam penulisan
skripsi ini.
4. Ir. Th. Prima Ari Setiyani, M.T., dan Pius Yozy Merucahyo, S.T., M.T., dosen
penguji yang telah memberikan masukan, bimbingan, saran dalam merevisi skripsi
ini.
5. Kedua orang tua saya atas dukungan, doa, cinta, perhatian, kasih sayang yang tiada
henti.
6. Adik-adikku tersayang Johan, Doly, Desy dan Chandra atas doa, perhatian,
dukungan dan kasih sayang tiada henti.
7. Hardy Boyfonda Doko atas dukungan, doa, perhatian, semangat dalam
menyelesaikan skripsi ini.
8. Staf sekretariat Teknik Elektro, atas bantuan dalam melayani mahasiswa.
9. Teman-teman kost muria Frada, kak Sopi, astrid, kak Eva, dll atas dukungan dan
doa.
10. Rake Silverrian alias om Rian, terima kasih banyak atas dukungan dalam
penyelesaian skripsi ini.
11. Aninditya Dichi Saptarini, atas segala dukungan yang selalu mengingatkan, doa,
dan menjadi teman yang baik.
12. Angelina Nita Jatun alias bu Nita, atas dukungan, doa, dan kasih sayang yang tiada
xi
13. Kawan-kawan seperjuangan angkatan 2008 Teknik Elektro, kawan-kawan
seperjuangan, dan semua kawan yang mendukung saya dalam mendukung dalam
menyelesaikan tugas akhir ini.
14. Semua pihak yang tidak dapat disebutkan satu persatu atas semua dukungan yang
telah diberikan dalam penyelesaian skripsi ini.
Penulis menyadari bahwa dalam penyusunan laporan akhir ini masih mengalami
kesulitan dan tidak lepas dari kesalahan. Oleh karena itu, penulis mengharapkan masukan,
kritik dan saran yang membangun agar skripsi ini menjadi lebih baik. Semoga skripsi ini
dapat bermanfaat sebagaimana mestinya.
Penulis
xii
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP ... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA
ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xv
DAFTAR TABEL... xvii
BAB I PENDAHULUAN
1.1. Latar Belakang ... 11.2. Tujuan dan Manfaat ... 1
1.3. Batasan Masalah ... 2
1.4. Metodologi Penelitian ... 2
BAB II DASAR TEORI
2.1. Mikrokontroer AVR Atmega8535 ... 42.1.1. Arsitektur AVR ATmega8535 ... 4
2.1.2. Deskripsi Mikrokontroler ATmega8535 ... 4
2.1.3. Organisasi Memori AVR ATmega8535 ... 5
2.1.4. Interupsi ... 7
xiii
BAB III PERANCANGAN
3.1. Perancangan Sistem Secara Keseluruhan ... ………. 303.2. Perancangan Perangkat Keras ... ………. 31
3.2.1. Perancangan Rangkaian Sistem Minimum mikrokontroler ATmega8535 31 3.2.2. Perancangan Rangkaian Penyearah ... 33
3.2.3. Perancangan Rangkaian Regulator ... 36
3.2.4. Perancangan Rangkaian Current Bosster ... 37
3.2.5. Rangkaian LCD ... 38
BAB IV HASIL DAN PEMBAHASAN
4.1. Hasil Implementasi Alat ... 444.1.1. Rangkaian Potensiometer Digital ... 45
4.1.2. Rangkaian Regulator +15Volt dan -15Volt ... 47
xiv
4.2.1. Pengujian Tegangan keluaran Tanpa Beban.……. ... 48
4.2.2. Pengujian Keluaran Berbeban ... ………. 52
4.3. Analisa dan Pembahasan Perangkat Lunak ... ………. 54
4.3.1. Program Menu ... 54
4.3.2. Program Tegangan Masukan ... 56
4.3.3. Program Proses ... 57
4.3.4. program penyetaraan ... 58
BAB V KESIMPULAN DAN SARAN
5.1. Kesimpulan ... 625.2. Saran ... 62
xv
DAFTAR GAMBAR
Gambar 1.1. Diagram Blok Sistem ... 2
Gambar 2.1. Konfigurasi Pin Mikrokontroler Atmega8535... 5
Gambar 2.2. Organisasi Memori ATmega8535 ... 6
Gambar 2.10. Konfigurasi Pin DS1669 8-pin SOIC 208-mil ... 21
Gambar 2.11. DS1669 dengan pushbutton tunggal ... 22
Gambar 2.12. DS1669 dengan pushbutton ganda ... 23
Gambar 2.13. Rangkaian Penyearah Gelombang Penuh ... 24
Gambar 2.14. Rangkaian penyarah gelombang penuh ... 24
Gambar 2.15. Bentuk gelombang penyearah gelombang penuh ... 25
Gambar 2.16. Rangkaian internal LM317 ... 26
Gambar 2.17. Rangkaian dasar regulator LM317 ... 27
Gambar 2.18. Rangkaian Regulator 0-12V ... 27
Gambar 2.19. Transistor Darlington ... 28
Gambar 2.20. Konfigurasi Transistor Darlington ... 29
xvi
Gambar 3.10. Diagram alir sistem ... 40
Gambar 3.11. Diagram Alir Input Tegangan ... 41
Gambar 3.12. Diagram Alir Proses ... 42
Gambar 3.13. Diagram Alir Proses Penyetaraan ... 43
Gambar 4.1. Rangkaian Sistem minimum ATmega8535 ... 44
Gambar 4.2. Keypad 4x4 dan LCD 16x2 ... 45
Gambar 4.3. Rangkaian PCB Potensiometer Digital ... 46
Gambar 4.4. Rangkaian Potensiometer Digital ... 47
Gambar 4.5. Rangkaian Regulator +15V dan -15V ... 48
Gambar 4.6. Tampilan Menu utama ... 55
Gambar 4.7. Tampilan Menu Pilihan ... 55
xvii
DAFTAR TABEL
Tabel 2.1. Hubungan PIN dan Interupsi ... 7
Tabel 2.2. Alamat Vektor Interupsi ATmega8535 ... 7
Tabel 2.2. (lanjutan) Alamat Vektor Interupsi ATmega8535 ... 8
Tabel 2.3. Timer/Counter Control Register (TCCR0) ... 8
Tabel 2.4. Presceale Timer/Counter0... 8
Tabel 2.5. Mode Operasi ... 9
Tabel 2.6. Mode Normal dan CTC ... 9
Tabel 2.7. Mode Fast PWM ... 9
Tabel 2.8. Mode phase correct PWM ... 10
Tabel 2.9. Timer/Counter Register (TCNT0) ... 10
Tabel 2.10. Output Compare Register (OCR0) ... 10
Tabel 2.11. Timer/Counter Interrupt Mask Register (TIMSK) ... 10
Tabel 2.12. Timer/Counter Interrupt Flag Register TIFR ... 11
Tabel 2.13. Register ADMUX ... 15
Tabel 2.14. Pengaturan Tegangan Referensi ADC... 15
Tabel 2.15. ADC Control and Status Register A (ADSRA) ... 16
Tabel 2.16. Skala Clock ADC ... 16
Tabel 2.17. Format data ADCH-ADCL jika ADLAR = 0 ... 17
Tabel 2.18. Format data ADCH-ADCL jika ADLAR = 1 ... 17
Tabel 2.19. ADC Auto Trigger Source (ADTS2:0) ... 17
Tabel 2.20. Pemicu ADC ... 17
Tabel 2.21. Konfigurasi Pin LCD 16x2 ... 20
Tabel 4.1. Hasil Pengujian tegangan keluaran regulator +15 Volt dan -15 Volt ... 47
Tabel 4.2. Hasil Penurunan tegangan keluaran regulator +15 Volt dan -15 Volt ... 48
Tabel 4.3. Hasil Pengujian Tanpa Beban ... 49
Tabel 4.4. Hasil Pengujian Arus Berbeban... 53
1
BAB I
PENDAHULUAN
1.1.
Latar Belakang
Perkembangan teknologi telah maju dengan pesat dalam perkembangan dunia elektronika . Dalam kehidupan sehari-hari telah banyak dijumpai alat-alat elektronika yang menggunakan catu daya (power supply) sebagai sumber tegangan maupun sumber arus. Catu daya merupakan hal terpenting dalam sebuah instrumentasi elektronika [1]. Catu daya sudah banyak dipergunakan untuk praktikum oleh mahasiswa, penelitian para perancang dan untuk keperluan-keperluan lain yang berhubungan dengan penggunaan catu daya. Keluaran (sumber tegangan maupun sumber arus) dari catu daya memiliki nilai keluaran tertentu (tetap) dan nilai keluaran yang dapat diatur-atur (variable).
Catu daya merupakan suatu rangkaian elektronik yang mengubah arus bolak-balik menjadi arus listrik searah. Hampir semua peralatan elektronik membutuhkan catu daya agar dapat berfungsi [2]. Berbagai variasi catu daya telah diciptakan oleh manusia untuk mempermudah penggunaan dalam menginstrumentasikan alat-alat elektronika. Pada umumnya catu daya yang sudah ada dengan keluaran sumber tegangan yang variable belum memiliki banyak pilihan sumber tegangan.
Berdasarkan hal diatas, penulis ingin membuat catu daya dengan nilai tegangan variable dan ditampilkan secara digital. Sistem ini akan dikendalikan dengan program pada mikrokontroler dengan mengatur potensiometer digital untuk menghasilkan sumber tegangan yang diharapkan. Sistem ini juga dilengkapi dengan keypad sebagai masukan dan Liquid Crystal Display (LCD) sebagai tampilan sumber tegangan, user memasukan nilai tegangan yang diperlukan dengan menekan tombol pada keypad sehingga keluaran akan sama dengan nilai yang tertampil pada layar LCD.
1.2.
Tujuan dan Manfaat
Manfaat dari penelitian ini adalah untuk mempermudah bagi pengguna catu daya dalam menginstrumentasikan alat-alat elektronika dengan hanya memasukkan nilai sumber tengangan yang diperlukan yaitu nilai sumber masukan sama dengan nilai sumber pada keluaran.
1.3.
Batasan Masalah
Penelitian akan dibatasi pada pembuatan catu daya digital berbasis mikrokontroler ATmega8535, spesifikasi alat yang digunakan:
a. Keluaran Tegangan DC yang terukur 0-12 volt dengan interval 0.1 volt. b. Menggunakan IC LM317.
c. Menggunakan trafo step down maksimal arus 2 A. d. Keypad sebagai masukan.
e. LCD (Liquid Crystal Display) sebagai penampil. f. Menggunakan potensiometer digital.
1.4.
Metodologi Penelitian
Penulisan tugas akhir ini menggunakan metode:
a. Pengumpulan bahan-bahan referensi berupa buku-buku dan jurnal-jurnal. Studi kepustakaan yang mencangkup literature-literatur mengenai datasheet ATmega8535 dan datasheet DS1669 (potensiometer digital).
b. Perancangan subsistem hardware dan software. Tahap ini bertujuan untuk mencari bentuk model yang optimal dari sistem yang akan dibuat dengan mempertimbangkan dari berbagai faktor-faktor permasalahan dan kebutuhan yang telah ditentukan. Gambar 1.1 adalah model diagram blok sistem yang akan dirancang.
Gambar 1.1. Diagram Blok Sistem
c. Perancangan dan pembuatan rangkaian elektronik seperti rangkaian ic regulator tegangan. Tahap ini meliputi perhitungan teoritis dan pembuatan PCB.
d. Perancangan dan pembuatan program menggunakan bahasa C dengan software CodeVision AVR.
e. Proses pengambilan data. Teknik pengambilan data dilakukan dengan cara memasukkan beberapa nilai melalui keypad dan keluaran akan tertampil melalui LCD (Liquid Crystal Display).
4
BAB II
DASAR TEORI
2.1.
Mikrokontroler AVR ATmega8535
AVR (Alf and Vegard’sRiscProcessor) merupakan seri mikrokontroler CMOS 8-bit
yang diproduksi oleh Atmel berbasis arsitekturRISC (Reduced Instruction Set Computer).
Chip AVR yang digunakan untuk tugas akhir ini adalah ATmega8535. Hampir semua
instruksi dieksekusi dalam satu siklus clockdan mempunyai 32 register general-purpose,
timer/counter fleksibel dengan mode compare, interupsi internal dan eksternal, serial
UART,programmable Watchdog Timer, danpower saving mode.
2.1.1 Arsitekstur AVR ATmega8535
Mikrokontroler ATmega8535 memiliki arsitektur sebagai berikut:
a. Saluran IO sebanyak 32 buah, yaituPort A, Port B, Port CdanPort D
b. ADC 10bitsebanyak 8 channel
c. Tiga buahtimer/counteryaituTimer 0, Timer 1 dan Timer 2
d. Watchdog Timerdengan osilator internal
e. SRAM sebanyak 512byte
f. Memori Flash sebesar 8 kb
g. Sumber Interupsi internal dan eksternal
h. PortSPI (Serial Pheriperal Interface)
i. EEPROM on board sebanyak 512byte
j. Komporator analog
k. PortUSART (Universal Shyncbrounous Ashynchronous Receiver Transmitter)
2.1.2 Deskripsi Mikrokontroler ATmega8535
Konfigurasi Pin Mikrokontroler ATmega8535 dengan kemasan 40-pin DIP (dual
in-line package) dapat dilihat pada gambar 2.1. Untuk memaksimalkan performa dan
paralelisme, AVR menggunakan arsitektur Harvard (dengan memori dan bus terpisah
untuk program dan data). Ketika sebuah intruksi sedang dikerjakan maka instruksi
Gambar 2.1. Konfigurasi Pin Mikrokontroler ATmega8535 [3]
Mikrokontroler ATmega8535 memiliki konfigurasi Pin sebagai berikut [3]:
a. VCC (power supply)
b. GND (ground)
c. PortA (PA7…PA0),PortA berfungsi sebagai input analog pada ADC (analog
digital converter).PortA juga berfungsi sebagai suatuPortI/O 8-bitdua arah.
d. Port B (PB7…PB0), Port B adalah suatu Port I/O 8-bit dua arah dengan
resistor internalpull-up(yang dipilh untuk beberapabit).
e. Port C (PC7…PC0), Port B adalah suatu Port I/O 8-bit dua arah dengan
resistor internalpull-up(yang dipilh untuk beberapabit).
f. Port D (PD7…PD0), Port B adalah suatu Port I/O 8-bit dua arah dengan
resistor internalpull-up(yang dipilh untuk beberapabit).
g. RESET (Reset Input)
h. XTAL1 (Input Oscillator)
i. XTAL2 (Output Oscillator)
j. AVCC adalah pin pengelola tegangan untukPortA dan ADC
k. AREF adalah pin referensi analog untuk ADC
Port A berfungsi sebagai input analog pada A/D converter danPort I/O 8-bit dua
arah. Port B, Port C, Port Dadalah suatu Port I/O 8-bit dua arah dengan resistor internal
pull-up (yang dipilih untuk beberapa bit). Pada rangkain reset, waktu pengosongan
kapasitor dapat dihitung dengan persamaan :
2.1.3 Organisasi Memori AVR ATmega8535
Mikrokontroler ATmega8535 memiliki 3 jenis memori yaitu memori Flash,
memori data dan EEPROM. Ketiganya memiliki ruang sendiri dan terpisah seperti pada
gambar 2.3.
Gambar 2.2. Organisasi Memori ATmega8535 [4]
2.1.3.1 MemoriFlash
Memori flash merupakan memori ROM tempat kode-kode program berada. Kata
flash menunjukkan jenis ROM yang dapat ditulis dan dihapus secara elektrik [5]. Memori
ini terdiri dari program boot dan program aplikasi. Jika tidak menggunakan fitur Boot
Leader Flash maka semua kapasitas aplikasi memori program digunakan untuk program
aplikasi namun jika mengunakan fitur Boot Leader Flash maka pembagian ukuran
ditentukan oleh BOOTSZfuse.
2.1.3.2 Memori Data
Memori data merupakan memori RAM yang digunakan untuk diperlukan program
[5].
Memori data terdiri dari 32 General Purpose Register (GPR) yang merupakan
register khusus yang bertugas untuk membantu eksekusi program oleh Arithmetic Logic
Unit (ALU) dan I/O register dan additional I/O register yang difungsikan khusus untuk
mengendalikan berbagai peripheral dalam mikrokontroler antara lain pin, port,
timer/counter, USART.
ATmega8535 memiliki kapasitas memori data sebesar 608 Byte yang terbagi
2.1.3.3 EEPROM
EEPROM merupakan memori data yang dapat menyimpan ketika chip mati (off).
Memori ini digunakan untuk keperluan penyimpanan data yang tahan terhadap gangguan
catu daya. ATmega8535 memiliki EEPROM sebesar 512 Byte yang terpisah dari memori
program maupun memori data [4].
2.1.4 Interupsi
Interupsi adalah suatu kondisi dimana mikrokontroler akan berhenti sementara dari
program utama untuk melayani instruksi-instruksi pada interupsi kemudian kembali
mengerjakan instruksi program utama setelah instruksi-instruksi pada interupsi selesai
dikerjakan [6].
Tabel 2.1. Hubungan PIN dan Interupsi [6]
Jenis Interupt PIN pada ATmega8535 INT0 PORTD.2
INT1 PORTD.3 INT2 PORTB.2
ATmega8535 menyediakan 21 macam sumber interupsi yang masing-masing
memiliki alamat programvector interupsi. Setiap interupsi yang aktif akan dilayani segera
setelah terjadi permintaan interupsi, tetapi jika di dalam waktu bersamaan terjadi lebih dari
satu interupsi maka prioritas yang akan diselesaikan lebih dulu adalah interupsi yang
memiliki nomor urut lebih kecil sesuai pada tabel 2.2.
Tabel 2.2. Alamat Vektor Interupsi ATmega8535 [4]
No. Vektor
Alamat
Program Sumber Interupsi Keterangan
1. 0x000 RESET External Pin, Power-on, Reset, Brown-out Reset and Watchdog Reset
2. 0x001 INT0 External Interrupt Request 0 3. 0x002 INT1 External Interrupt Request 1 4. 0x003 TIMER2 COMP Timer/Counter2 Compare Match 5. 0x004 TIMER2 OVF Timer/Counter2 Overflow
6. 0x005 TIMER1 CAPT Timer/Counter1 Capture Event 7. 0x006 TIMER1 COMPA Timer/Counter1 Compare Match A 8. 0x007 TIMER1 COMPB Timer/Counter1 Compare Match B 9.. 0x008 TIMER1 OVF Timer/Counter1 Overflow
Tabel 2.2. (lanjutan) Alamat Vektor Interupsi ATmega8535 [4]
No. Vektor
Alamat
Program Sumber Interupsi Keterangan 12. 0x00B USART, RXC USART, Rx Complete
13. 0x00C USART, UDRE USART Data Register Empty 14. 0x00D USART, TXC USART, Tx Complete
15. 0x00E ADC ADC Conversion Complete 16. 0x00F EE_RDY EEPROM Ready
17. 0x010 ANA_COMP Analog Comparator 18. 0x011 TWI Two-wire Serial Interface 19. 0x012 INT2 External Interrupt Request 2 20. 0x013 TIMER0 COMP Timer/Counter0 Compare Match 21. 0x014 SPM_RDY Store Program Memory Ready
2.1.5
Timer/Counter0
Timer/Counter0 adalah sebuah timer/counter yang dapat mencacah sumber
pulsa/clock baik dari dalamchip (timer) maupun dari luarchip (counter) dengan kapasitas
8-bit(256 cacahan).
2.1.5.1RegisterPengendaliTimer0 [5] 1. Timer/Counter Control Register(TCCR0)
Tabel 2.3.Timer/Counter Control Register(TCCR0)
BitCS00 s.d. 02 bertugas untuk memilih (prescealer) atau mendefenisikan pulsa/clock
yang akan masuk ke dalamTimer/Counter0.
Tabel 2.4.Presceale Timer/Counter0
CS02 CS01 CS00 Keterangan
0 0 0 Stop/berhenti
0 0 1 Clk (sama dengan clock cpu)
(1 clk timer/counter0= 8 clk cpu) artinya tiap 8 clock CPU yang masuk ke dalam
timer/counter0 dihitung satu oleh register pencacah TCNT0. Falling edge adalah
perubahan pulsa/clockdari 1 ke 0.Rising edgeadalah perubahan pulsa/clockdari 0 ke 1.
a. Bit7 – FOC0 :Force Output Compare
Bit7 hanya dapat digunakan untuk metode pembanding . Jikabit– F0C0 di-set
maka akan memaksa terjadinyacompare-match(TCNT0==OCR0).
b. Bit3, 6 – WGM01:0:Waveform Generation Mode
Bit 3 danbit 6 digunakan untuk memilih mode seperti ditunjukkan pada tabel
2.5.
Tabel 2.5. Mode Operasi
WGM01 WGM00 Mode Operasi TOP Update OCR0
Flag TOV0 on
0 0 Normal 0xFF Imidiet MAX
0 1 Phase correct PWM 0xFF TOP Bottom
1 0 CTC OCR0 Imidiet MAX
1 1 Fast PWM 0xFF Bottom MAX
c. Bit5,4 – COM01:0:Compare Match Output Mode
Bit 5 dan bit 4 berfungsi mendefinisikan pin OC0 sebagai output Timer0
(saluranoutputPWM).
Tabel 2.6. Mode Normal dan CTC
COM01 COM00 Output pin OC0 0 0 Tidak dihubungkan
0 1 Togglesaatcompare match 1 0 Clearsaatcompare match 1 1 Setsaatcompare match
Tabel 2.7. ModeFastPWM
COM01 COM00 Output pin OC0
0 0 Tidak dihubungkan
0 1
Tabel 2.8. ModePhase CorrectPWM
COM01 COM00 Output pin OC0
0 0 Tidak dihubungkan
0 1
-1 0 Clearsaatcompare matchketikaup-counting, Set saat compare matchketikadown-counting(noninverting)
1 1 Setsaatcompare matchketikaup-counting,clearsaat compare matchketikadown-counting(inverting)
2. Timer/Counter Register(TCNT0)
Tabel 2.9.Timer/Counter Register(TCNT0)
Register yang bertugas menghitung pulsa yang masuk kedalam timer/counter.
Kapasitas registernya adalah 8-bit (255 hitungan), setelah mencapai hitungan
maksimal maka akan kembali ke nol (overflow/limpahan).
3. Output Compare Register(OCR0)
Tabel 2.10.Output Compare Register(OCR0)
Register yang bertugas sebagai register pembanding dengan menentukan besarnya
sesuai dengan kebutuhan. Saat TCNT0 mencacah maka secara otomatis oleh CPU
akan dibandimgkan dengan isi OCR0 secara kontinyu dan jika isi TCNT0 sama
dengan isi OCR0 maka akan terjadi compare match yang dapat dimanfaatkan untuk
mode CTC dan PWM.
4. Timer/Counter Interrupt Mask Register(TIMSK)
Tabel 2.11.Timer/Counter Interrupt Mask Register(TIMSK)
a. Bit0 – TOIE0: T/C0Overflow Interrupt Enable
Register TIMSK Timer/Counter0 memiliki bit TOIE0 sebagai bit peng-aktif
interupsiTimer/Counter0, jika TOIE0=1 makaenabledan jika TOIE0=0 maka
b. Bit1 – OCIE0: T/C0Output Compare Match Enable
Selain ATMega8,TIMSK Timer/Counter0 memilki OCIE0 sebagai bit
peng-aktif interupsicompare match Timer/Counter0, jika OCIE0=1 enable dan jika
OCIE0=0 makadisable.
5. Timer/Counter Interrupt Flag Register(TIFR)
Tabel 2.12.Timer/Counter Interrupt Flag Register(TIFR)
a. Bit1 – OCF0:Output Compare Flag 0
Flag OCF0 akan di set sebagai indikator jika terjadinya compare match dan
akan clear dengan sendirinya bersamaan eksekusi vektor interupsi Timer0
compare match.
b. Bit0 – TOV0:Timer/Counter0 Overflow Flag
Bit status Timer/Counter0 dalam register TIFR, dimana bit TOV0 akan set
secara otomatis ketika terjadi limpahan/overflow pada register TCNT0 dan
akanclearbersamaan dengan eksekusi vektor interupsi.
2.1.5.2 Mode Operasi 1. Normal
Mode normal ada dua yaitu normaloverflowdan normalcompare match.Dalam mode
normal overflow register pencacah TCNT0 bekerja secara normal selalu
mencacah/menghitung ke-atas (counting-up) hingga mencapai nilai maksimal 0xFF
lalu 0x00 lagi (overflow). Dalam mode normal compare match register TCNT0
bekerja seperti mode normal overflow, bedanya jika diberi isi register OCR0 maka
ketika TCNT0==OCR0 akan terjadi compare match yang menyebabkan flag OCF0
secara otomatis set yang ditandai dengan terjadinya interupsi jika interupsi Timer0
compare matchdiaktifkan.
2. CTC (Clear Timer on Compare Match)
Dalam mode CTC register pencacah TCNT0 mencacah naik (counting-up) hingga
mencapai TOP (nilai TCNT0 sama dengan nilai OCR0 yang telah ditentukan)
kemudian TCNT0 nol lagi yang otomatis menge-set flag OCF0 dan akan
3. FastPWM (Pulsa Width Modulation)
Dalam mode fast PWM membuat generator gelombang. PWM adalah gelombang
digital/pulsa yang dapat diatur duty cycle-nya.Duty cycle adalah perbandingan antara
lama pada saat satu (on) dan lama periode satu gelombang pulsa.
Gambar 2.3. Pulsa PWM [5]
= × 100% (2.2)
Timer/Counter0 dalam mode fast PWM untuk mengendalikan lama t on dan t off
melalui register pembanding OCR0 yang menyebabkan besar duty cycle yang
dihasilkan. Chanel (saluran) PWM Timer/Counter0 adalah pin OC0 (PB3) sebagai
keluaran saluran PWM. Sifat cacahan mode fast PWM register pencacah TCNT0
mencacah dari BOTTOM (0x00) terus mencacah naik (counting-up) hingga mencapai
MAX (0xFF) kemudian mulai dari BOTTOM lagi dan seterusnya disebut single slope
(satu arah cacahan ) seperti ditunjukkan gambar 2.3.
Gambar 2.3. PulsaFastPWM [5]
= _ /
· 256 (2.3)
dengan:
_ / = frekuensiclock chip
=presecalersumberclock(1,8,64,256,1024)
4. Phase CorrectPWM
Pada mode phase correct PWM operasi cacahan register TCNT0 menggunakan dual
slope(dua arah cacahan/bolak-balik) dimana TCNT0 mencacah dari BOTTOM (0x00)
counting-up hingga mencapai MAX (0xFF) kemudian counting-down hingga
BOTTOM (0x00) dan seterusnya.
Gambar 2.4. PulsaNon-inverting Phase CorrectPWM [4]
Frekuensiphase correctPWM dihitung menggunakan persamaan:
= _ /
· 510 (2.4)
dengan:
_ / = frekuensiclock chip
=presecalersumberclock(1,8,64,256,1024)
2.2.
Analog To Digital Converter
(ADC)
Mikrokontroler ATmega8535 memiliki fasilitas ADC yang sudah built-in dalam
chip. ATmega8535 memiliki resolusi ADC 10-bit dengan 8 channel input dan mendukung
Data hasil konversi dapat dihitung dengan persamaan:
1. Konversi tunggal
= · 1024 (2.5)
dengan:
= Tegangan masukan pada pin yang dipilih
= Tegangan referensi
2. Penguat beda
= ( − ) · · 512 (2.6)
dengan:
= Tegangan masukan pada pin positif
= Tegangan masukan pada pin negative
= Faktor penguatan
= Tegangan referensi
2.2.1. ADCMultiplexer Selection Register(ADMUX)
Tabel 2.13.RegisterADMUX
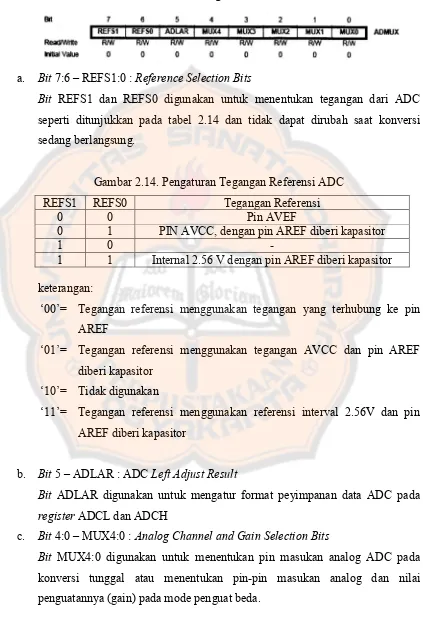
a. Bit7:6 – REFS1:0 :Reference Selection Bits
Bit REFS1 dan REFS0 digunakan untuk menentukan tegangan dari ADC
seperti ditunjukkan pada tabel 2.14 dan tidak dapat dirubah saat konversi
sedang berlangsung.
Gambar 2.14. Pengaturan Tegangan Referensi ADC
REFS1 REFS0 Tegangan Referensi
0 0 Pin AVEF
0 1 PIN AVCC, dengan pin AREF diberi kapasitor
1 0
-1 1 Internal 2.56 V dengan pin AREF diberi kapasitor
keterangan:
‘00’= Tegangan referensi menggunakan tegangan yang terhubung ke pin
AREF
‘01’= Tegangan referensi menggunakan tegangan AVCC dan pin AREF
diberi kapasitor
‘10’= Tidak digunakan
‘11’= Tegangan referensi menggunakan referensi interval 2.56V dan pin
AREF diberi kapasitor
b. Bit5 – ADLAR : ADCLeft Adjust Result
Bit ADLAR digunakan untuk mengatur format peyimpanan data ADC pada
registerADCL dan ADCH
c. Bit4:0 – MUX4:0 :Analog Channel and Gain Selection Bits
Bit MUX4:0 digunakan untuk menentukan pin masukan analog ADC pada
konversi tunggal atau menentukan pin-pin masukan analog dan nilai
2.2.2. ADCControl and Status Register A(ADSRA)
Tabel 2.15. ADCControl and Status Register A(ADSRA)
a. Bit7 – ADEN : ADCEnable
Bit ADEN digunakan untuk mengaktifkan dan menonaktifkan fasilitas ADC.
(BitADEN= 1 maka ADC aktif danBitADEN= 0 maka ADC tidak aktif).
b. Bit5 – ADATE : ADCAuto Trigger Enable
Bit ADATE digunakan untuk mengaktifkan pemicu proses konversi ADC
sesuai denganbit-bitADTS padaregisterSFIOR (bitADATE=1 maka pemicu
ADC aktif).
c. Bit4 –ADIF : ADCInterrupt Flag
Bit ADIF adalah bendera interupsi ADC yang digunakan untuk menunjukkan
ada tidaknya permintaan interupsi ADC.BitADIF akan bernilai ‘1’ jika proses
konversi ADC telag selesai.
d. Bit3 – ADIE : ADCInterrupt Enable
BitADIE digunakan untuk mengaktifkan dan menonaktifkan interupsi ADC.
e. Bit2:0 – ADPS2:0 : ADCPreascaler Select Bits
BitADPS2, ADPS1 dan ADPS0 digunakan untuk menentukan factor pembagi
frekuensi kristal yang hasilnya digunakan sebagaiclockADC.
Tabel 2.16. Skala Clock ADC [4]
ADPS2 ADPS1 ADPS0 Faktor Pembagi
0 0 0 2
0 0 1 2
0 1 0 4
0 1 1 8
1 0 0 16
1 0 1 32
1 1 0 64
2.2.3. ADC DataRegister(ADCH-ADCL)
Register ini digunakan untuk penyimpanan data 10-bit hasil konversi ADC. Data
tersebut dapat disimpan dalam 2 format yang berbeda tergantung pada nilai bit ADLAR
seperti ditunjukkan pada tabel 2.17 dan tabel 2.18.
Tabel 2.17. Format data ADCH-ADCL jika ADLAR = 0
Tabel 2.18. Format data ADCH-ADCL jika ADLAR = 1
2.2.4. ADC Auto Trigger Source (ADTS2:0)
Tabel 2.19. ADC Auto Trigger Source (ADTS2:0)
Bit-bit ADTS2:0 berada pada register SFIOR digunakan untuk mengatur pemicu
proses konversi ADC seperti ditunjukkan pada tabel 2.20.
Tabel 2.20. Pemicu ADC [4]
ADTS2 ADTS1 ADTS0 Sumber Pemicu Konversi ADC
0 0 0 Free Running Mode
0 0 1 Analog Comparator
0 1 0 External Interrupt Request 0 0 1 1 Timer/Counter0 Compare Match 1 0 0 Timer/Counter0 Overflow
1 0 1 Timer/counter1 Compare Match B 1 1 0 Timer/counter1 Overflow
keterangan:
‘000’ = Mode Free-Running, konversi ADC akan dimulai pada saatbit ADSC
padaregisterADCSRA diset ‘1’.
‘001’ = Konversi ADC akan dimulai sesuai dengan pengaturan output Analog
Comparator
‘010’ = Konversi ADC akan dimulai pada saat terjadi interupsi eksternal 0
‘011’ = Konversi ADC akan dimulai pada saat terjadi Timer/Counter0
Compare Match
‘100’ = Konversi ADC akan dimulai pada saat terjadi Timer/Counter0
Overflow
‘101’ = Konversi ADC akan dimulai pada saat terjadiTimer/counter1 Compare
Match B
‘110’ = Konversi ADC akan dimulai pada saat terjadiTimer/counter1 Overflow
‘111’ = Konversi ADC akan dimulai pada saat terjadi Timer/counter1 Capture
Event
2.3.
Keypad
Keypad matriks adalah tombol-tombol yang disusun secara matriks (baris x kolom)
sehingga dapat mengurangi penggunaan pin input. Sebagai contoh, keypad matriks 4x4
menggunakan 8 pin untuk 16 tombol. Hal tersebut dimungkinkan karena rangkain tombol
disusun secara horizontal membentuk baris dan secara vertikal membentuk kolom seperti
pada gambar 2.6.
Proses pengecekan dari tombol yang dirangkai secara matriks adalah dengan teknik
scanning, yaitu proses pengecekan yang dilakukan dengan cara memberikan umpan-data
pada satu bagian dan mengecek feedback (umpan balik) pada bagian lain. Pemberian
umpan-data dilakukan pada bagian baris dan pengecekan umpan balik pada kolom. Pada
saat pemberian umpan data pada satu baris, maka baris yang lain harus dalam kondisi
inversi. Tombol yang ditekan dapat diketetahui dengan melihat asal data dan di kolom
mana data tersebut terdeteksi.
2.4.
Liquid Crystal Display
(LCD)
LCD (Liquid Crystal Display) memiliki 2 jenis yaitu LCD karakter dan LCD
grafik. LCD karakater adalah LCD yang karakternya terbatas pada tampilan karakter,
khususnya karakter ASCII seperti karakter-karakter yang tercetak pada keyboard
komputer. Sedangkan LCD grafik adalah LCD yang tampilannya tidak terbatas, bahkan
dapat menampilkan foto. LCD grafik inilah yang terus berkembang seperti layar LCD yang
biasa dilihat dinotebook/laptop[8].
Jenis LCD karakter yang beredar di pasaran biasanya dituliskan dengan bilangan
matriks dari jumlah karakater yang dapat dituliskan pada LCD tersebut, yaitu jumlah
kolom karakter dikali jumlah baris karakter. Sebagai contoh, LCD 16x2 artinya terdapat 16
kolom dalam 2 baris ruang karakter seperti pada gambar 2.7, yang berarti total karakter
yang dapat dituliskan adalah 32 karakater [8].
Gambar 2.7. Kolom dan Baris Karakter pada LCD 16x2
Agar dapat mengendalikan LCD karakter dengan baik memerlukan koneksi yang
benar. Koneksi yang benar dengan mengetahui pin-pin antarmuka yang dimiliki LCD
Gambar 2.8. Konfigurasi Pin LCD 16x2
Tabel 2.21. Konfigurasi Pin LCD 16x2
Display karakter pada LCD diatur oleh pin EN, RS dan R/W dimana jalur EN
dinamakan Enable. Jalur ini digunakan untuk memberitahukan LCD bahwa data sedang
dikirimkan. Untuk mengirimkan data ke LCD, maka melalui program EN harus dibuat
logika low “0” dan set pada dua jalur kontrol yang lain RS dan R/W. Ketika dua jalur yang
lain telah siap, set En dengan logika high “1” dan tunggu utnuk sejumlah waktu tertentu
(sesuai dengan datasheet dari LCD tersebut) dan berikutnya set ke logika low “0” lagi.
Jalur RS adalah jalur Register Select. Ketika RS berlogika low “0”, data akan di anggap
sebagai sebagai sebuah perintah atau instruksi khusus (seperti clear screen, posisi kursor,
dll). Ketika RS berlogika high “1” , data yang dikirim adalah data text yagn akan
ditampilkan pada display LCD. Sebagai contoh, untuk menampilkan angka “1” pada layar
LCD. Sedangakan pada aplikasi umum pin R/W selalu diberi logika low “0”. Pada
akhirnya, bus data terdiri dari 4 atau 8 jalur (bergantung pada mode operasi yang dipilih
oleh user). Pada kasus bus data8bit, jalur diacuhkan sebagai DB0 s/d DB7.
2.5.
Potensiometer Digital
Potensiometer atau resistor digital menggunakan seri DS1669. DS1669
menawarkan dua paket IC standar yaitu 8-pin DIP 300-mil (gambar 2.9) dan 8-pin SOIC
208-mil (gambar 2.10). DS1669 dapat dikonfigurasikan untuk beroperasi menggunakan
pushbutton tunggal, pushbutton ganda atau sumber input dengan memvariasikan kondisi
daya.
Gambar 2.9. Konfigurasi Pin DS1669 8-pin DIP 300-mil [9]
Gambar 2.10. Konfigurasi Pin DS1669 8-pin SOIC 208-mil [9]
Deskripsi Pin DS1669 sebagai berikut [9] :
a. RH(High Terminal of Potensiometer)
b. RW(Wiper Terminal of Potensiometer)
c. RL(Low Terminal of Potensiometer)
d. –V, +V (Voltage Inputs)
e. UC (Up Contact Input)
f. D (Digital Input)
IC DS1669 dapat dikonfigurasi untuk beroperasi dari contact closure tunggal,
contact closureganda, atau sumberdigital input(D).Contact closuredidefinisikan sebagai
transisi dari tingkat tinggi ke tingkat rendah pada inputup contact(UC) ataudown contact
(DC). Ketiga input kontrol aktif ketika dalam keadaan low dan tidak aktif ketika dalam
keadaanhigh.
IC DS1669 menafsirkan masukan lebar pulsa sebagai sarana untuk mengontrol
gerakan wiper. Sebuah masukan pulsa tunggal pada terminal masukan UC, DC, atau D
akan menyebabkan posisi wiper untuk bergerak 1/64 dari hambatan total. Sebuah transisi
dari tinggi ke rendah pada masukan tersebut dianggap sebagai awal activity pulse atau
contact closure. Sebuah pulsa tunggal harus lebih besar dari 1 ms tapi berlangsung tidak
lebih dari 1 detik.
Masukan pulsa yang berlangsung lebih lama dari 1 detik akan menyebabkan wiper
bergerak satu posisi setiap 100ms mengikuti waktu 1 detik terus awal. Total waktu untuk
mengatasi seluruh potensiometer menggunakan pulsa masukan terus menerus diberikan
oleh persamaan:
1 + 63 × 100 = 7.3 (2.8)
Operasi contact closure tunggal memungkinkan pengguna untuk mengontrol
gerakan wiper di kedua arah dari masukan pushbutton tunggal. Gambar 2.11 menyajikan
konfigurasipushbuttontunggal. Masukan UC digunakan untuk kenaikan dan pengurangan
posisi wiper untuk mode operasi pushbutton tunggal. Masukan DC tidak memberikan
fungsi pada mode ini, tetapi harus terhubung ke sumber tegangan positif (Vcc).
Arah awal gerakan wiper dalam operasi pushbutton tunggal ditentukan oleh
aktivitas sebelumnya. Arah awal gerakan wiper akan berlawanan dengan kegiatan
sebelumnya. Mengubah arah gerakan wiper dalam mode pushbutton tunggal dicapai
dengan memungkinkan masa tidak aktif pada masukan dari UC (lebih besar dari) 1 detik,
atau dengan menggerakkan wiper untuk akhir dari kisaran potensiometer. Hal ini akan
terjadi terlepas dari apakah input adalah pulsa terus menerus, urutan pulsa berulang atau
pulsa tunggal.
sumberdigital input (D), dirancang untuk mikroprosesor atau aplikasi pengendali.
Masukan pengendali ini memanipulasi perangkat dengan cara yang sama seperti
konfigurasi pushbutton tunggal, mengendalikan pergerakan posisi wiper baik arah keatas
dan ke bawah. Penambahan fitur atas konfigurasi pushbutton tunggal adalah kemampuan
untuk kenaikan atau pengurangan posisi wiper pada tingkat yang lebih cepat.
Dalam modepushbutton ganda, setiap arah dikendalikan oleh masukan up contact
(UC) atau down contact (DC), masing-masing. Tidak ada pernyataan menunggu yang
diperlukan untuk mengubah arah wiper dalam mode pushbutton ganda. Dalam mode
pushbuttonganda, sebagai posisiwiper mencapai potensiometer akhir, arah gerakan wiper
tidak akan berubah.
Gambar 2.12. DS1669 denganpushbuttonganda [9]
Semua masukan UC, DC, dan D, secara internal pulled-up oleh hambatan 100kΩ.
Masukan UC dan DC secara internal debounced dan tidak memerlukan komponen
2.6.
Rectifier
Rectifier adalah sebuah rangkaian yang mengkonversi sebuah sinyal AC (arus
bolak-balik) menjadi sinyal DC (arus searah).
Gambar 2.13. Rangkaian Penyearah Gelombang Penuh
= √2 (2.9)
= − (2 ∙ ) (2.10)
2.7.
Filter
Filter dalam rangkaian penyearah digunakan untuk memperkecil tegangan ripple,
sehingga dapat diperoleh tegangan keluaran yang lebih rata, dengan memanfaatkan proses
pengisian dan pengosongan muatan kapasitor [10].
Penyearah gelombang penuh tapis kapasitor diperoleh dengan menghubungkan
parallel kapasitor beban dari rangkaian seperti pada gambar 2.14. Bentuk gelombang
tegangan keluaran terlihat pada gambar 2.15.
Gambar 2.15. Bentuk gelombang penyearah gelombang penuh
Bila tegangan pengosongan kapasitor total dinyatakan dengan Vr, maka tegangan
keluaran dc [11] adalah:
= −
2
(
2.11)
dimana:
= Tegangan input regulator (Vi-Vo = 5V) [12]
= Tegangan puncak
= Teganganripple
maka Vr adalah:
=
2 ∙ ∙ ∙ (2.12)
dimana:
= Arus maksimal keluaran (2A)
= Frekuensi
2.8.
IC Regulator
Regulator tegangan variabel merupakan regulator yang memiliki tegangan output
dapat diubah-ubah sesuai kebutuhan. Rangkaian regulator tegangan variabel saat ini telah
tersedia dalam bentuk chip IC regulator tegangan variabel 3-pin. IC LM317 merupakan
chip IC regulator tegangan variabel untuk tegangan DC positif.
Gambar 2.16. Rangkaian internal LM317 [12]
Fungsi bagian pada regulator tegangan positif LM317 [13] seperti berikut:
Voltage reference adalah jalur atau bagian yang berfungsi untuk memberikan tegangan referensi dari kontrol tegangan output pada LM317. Input tegangan
referensi diambil dari rangkaian pembagi tegangan variabel, R1 dan R2 pada
rangkaian gambar 2.17.
Komparator berfungsi sebagai pembanding antar tegangan output dan tegangan referensi, dimana besarnya tegangan output dapat dihitung dari persamaan 2.7.
Circuit protection adalah rangkaian pelindung IC LM317 dari terjadinya arus korsleting.
Power regulator adalah rangkaian darlington transistor NPN yang berfungsi
untuk memperkuat arus output regulator tegangan variabel LM317.
Gambar 2.17. Rangkaian dasar regulator LM317 [12]
= 1.25 · 1 + + · (2.13)
Cin diperlukan ketika regulator adalah lokasi jarak yang cukup dari filter catu daya.
Cout tidak diperlukan untuk stabilitas, namun itu tidak meningkatkan respon transien. Bila
Iadj adalah pengendali kurang dari 100uA, kesalahan yang berhubungan dengan istilah ini
diabaikan dalam sebagian besar aplikasi [12].
Gambar 2.18. Rangkaian Regulator 0-12V [14]
Rangakaian regulator pada gambar 2.18 merupakan rangkaian pengembangan yang
akan menghasilkan tegangan variabel keluaran berawal dari 0V.
2.9.
Penguat Arus
Transistor berfungsi sebagai penguat selain sebagai saklar. Prinsip yang digunakan
dalam transistor sebagai penguat adalah arus kecil pada basis digunakan untuk mengontrol
arus yang lebih besar yang diberikan ke kolektor melewati transistor tersebut. Fungsi dari
transisitor hanya sebagai penguat ketika arus basis akan berubah. Perubahan arus kecil
pada basis mengontrol inilah yang dinamakan dengan perubahan besar pada arus yang
mengalir dari kolektor ke emitter. Kelebihan dari transistor penguat tidak hanya dapat
menguatkan sinyal tetapi transistor ini juga bisa digunakan sebagai penguat arus, penguat
tegangan dan penguat daya.
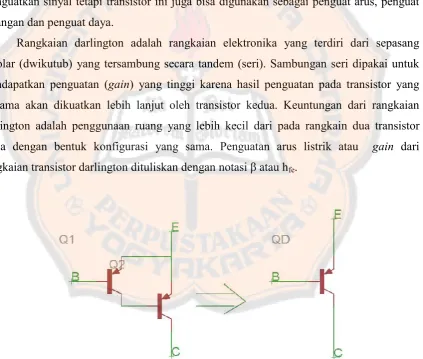
Rangkaian darlington adalah rangkaian elektronika yang terdiri dari sepasang
bipolar (dwikutub) yang tersambung secara tandem (seri). Sambungan seri dipakai untuk
mendapatkan penguatan (gain) yang tinggi karena hasil penguatan pada transistor yang
pertama akan dikuatkan lebih lanjut oleh transistor kedua. Keuntungan dari rangkaian
darlington adalah penggunaan ruang yang lebih kecil dari pada rangkain dua transistor
biasa dengan bentuk konfigurasi yang sama. Penguatan arus listrik atau gain dari
rangkaian transistor darlington dituliskan dengan notasi β atau hfe.
Gambar 2.20. Konfigurasi Transistor Darlington [10]
− + − + = 0 (2.15)
Mensubtitusikan persamaan:
= ( + 1) (2.16)
Maka persamaan IB:
= +
30
BAB III
RANCANGAN PENELITIAN
3.1
Perancangan Sistem Secara Keseluruhan
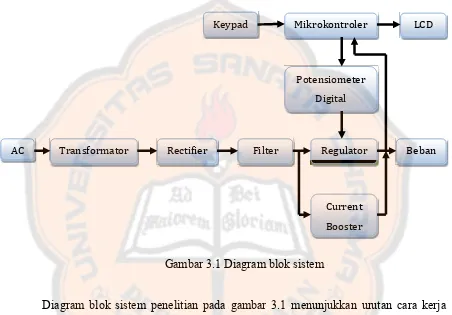
Gambar 3.1 Diagram blok sistem
Diagram blok sistem penelitian pada gambar 3.1 menunjukkan urutan cara kerja
sistem secara keseluruhan. Sistem ini terdiri atas beberapa bagian yaitu:
a. Arus bolak-balik (ac) sebagai sumber masukan utama (PLN 220V).
b. Transformatorberfungsi untuk menurunkanleveltegangan AC.
c. Rectifier berfungsi untuk mengubah tegangan bolak-balik (AC) menjadi
tegangan searah (DC).
d. Filterberfungsi perata (penghalus) arus DC.
e. Regulatorberfungsi untuk memperoleh tegangan DC yang diharapkan.
f. Current Boosterberfungsi sebagai penguat arus.
g. Keypad berfungsi untuk memasukkan tegangan.
h. Mikrokontroler berfungsi memproses sistem.
i. LCD sebagai penampil.
AC Transformator Rectifier Filter Regulator Beban
Mikrokontroler LCD Keypad
Potensiometer
Digital
Current
j. Potensiometerdigital berfungsi untuk mengatur tegangan yang diinginkan.
k. Beban berupa beban resistif.
Nilai tegangan yang diinginkan oleh user akan dimasukkan melalui keypad dan
ditampilkan melalui LCD. Data tersebut akan diproses oleh mikrokontroler ATmega8535
yang melalui potensiometer digital yang digunakan pada regulator akan mengeluarkan
tegangan keluaran. Hasil tesebut akan dibandingkan kembali melalui mikrokontroler
ATmega8535 untuk membandingkan tegangan yang diinginkan dan dihasilkan. Apabila
tidak sama maka akan diproses kembali oleh mikrokontroler agar sama dengan nilai
tegangan yang diharapkan.
3.2
Perancangan Perangkat Keras
3.2.1 Perancangan Rangkaian Sistem Minimum Mikrokontroler ATmega8535
Rangkaian sistem minimum berfungsi sebagai I/O untuk mengolah data dari keypad
dan mengontrol potensiometer digital pada regulator variabel. Mikrokontroler
membutuhkan sistem minimum yang terdiri dari rangkaian eksternal yaitu rangkaian
osilator dan rangkaianreset.
Rangkaian osilator ditunjukkan pada gambar 3.2. Perancangan rangkaian osilator
menggunakan kristal dengan frekuensi 12Mhz dan menggunakan kapasitor 22pF
(datasheet) padapinXTAL1dan XTAL2di mikrokontroler.
Gambar 3.2. Rangkaian osilator ATmega8535 [5]
Gambar 3.3 menunjukkan rangkaianresetmikrokontroler ATmega8535. Rangkaian
reset bertujuan untuk memaksa proses kerja pada mikrokontroler diulang dari awal. Jika
tombol reset ditekan, maka pin reset akan mendapat input logika rendah, sehingga
mikrokontroler akan mengulang proses eksekusi program dari awal. Pada perancangan
Gambar 3.3. RangkaianresetATmega8535 [5]
Perancangan pengunaan port sebagai input dan output pada mikrokontroler
disesuaikan dengan kebutuhan.Port yang akan digunakan adalah portA, portB, portC dan
portD. PortB digunakan sebagai port input dari keypad. PortD.0, portD.1, portD.2 dan
portD.3 digunakan sebagaiport data, sedangkan portD.4,portD.5 dan portD.6 digunakan
sebagaiport pengaturinterface LCD. PadaportA.0 digunakan sebagai port potensiometer
digital. Tabel 3.1 menunjukkan pengunaan port-port yang akan digunakan pada
mikrokontroler ATmega8535.
Tabel 3.1. Penggunaanport-portpada mikrokontroler
No NamaPort Keterangan
1 PortA.0 UC PD_1
2 PortA.3 ADC_1
3 PortA.4 ADC_2
4 PortA.7 UD PD_1
5 PortB.0 K1 Keypad
6 PortB.1 K2 Keypad
7 PortB.2 K3 Keypad
8 PortB.3 K4 Keypad
9 PortB.4 B1 Keypad
10 PortB.5 B2 Keypad
11 PortB.6 B3 Keypad
12 PortB.7 B4 Keypad
13 PortC.0 UC PD_2
19 PortD.4 EnableLCD
20 PortD.5 R/W LCD
Secara keseluruhan rangkaian sistem minimum mikrokontroler ATmega8535
ditunjukkan pada gambar 3.4.
Gambar 3.4. Rangkaian Sistem Minimum
3.2.2 Perancangan Rangkaian Penyearah
Rangkaian penyearah seperti pada gambar 2.15 menggunakan trafo 3A dengan
tegangan AC Vac sebesar 12V (Vrms) dan bridge rectifier. Diketahui arus beban Idc
sebesar 2A.
Pada persamaan 2.9 dapat dihitung nilai tegangan ac pada titik Vm seperti terlihat
= √2
= 12√2 = 16,9
Pada perhitungan nilai Vm dapat diperoleh sebesar 16,9V dari hasil tersebut dapat
diperoleh nilai tegangan DC sebelum difilter VLdengan persamaan:
= − (2 ∙ )
= 16,9 − (2 ∙ 0,7) = 15,5
Pada gambar 2.17 dan gambar 2.18, perhitungan nilai Vr dengan menentukan nilai
tegangan dc (Vdc) sebesar 15V agar tegangan keluaran dc sebesar 12Vdc dapat dihitung
melalui persamaan 2.11:
= −
2
= −
−2
= 15 − 15,5
−2 = 0,25
Perhitungan kapasitor filter dapat diperoleh dengan persamaan 2.12 dengan nilai Vr
sebesar 0,25V. Arus dc (Idc) dalammiliamperedan filter kapasitor (C) dalammicrofarad.
= 2 ∙ ∙
= 2 ∙ ∙
= 2000
Pada perhitungan nilai minimal C diperoleh sebesar 66,7uF, nilai tesebut tidak
terdapat dipasaran sehingga digunakan nilai kapasitor sebesar 1000uF.
= × 100%
=0,25
15 × 100%
= 1,7%
Pemilihan nilai C sebesar 1000uF akan berdampak memperkecil ripple seperti
persamaan:
= 2 ∙ ∙
= 2000
2 ∙ 60 ∙ 1000 = 0,017
makaripplemenjadi:
= × 100%
=0,017
15 × 100%
3.2.3 Perancangan Rangkaian Regulator
Gambar 3.6. Rangkaian Regulator 0-12V [14]
Rangkaian regulator pada gambar 3.6 didisain untuk menghasilkan tegangan
variabel keluaran 0V hingga 24V. Untuk membuatnya menjadi regulator tegangan variable
resistor R2diganti dengan potensiometer digital dengan nilai resistansi sebesar 10kΩ.
Perhitungan nilai resistor R1 dapat diperoleh dengan persamaan 2.14 dimana telah
diketahui nilai tegangan referensi Vref sebesar 1,25V, arus adjustable Iadjsebesar 46uF,
dan tegangan keluaran Vo sebesar 24V serta nilai yang sudah ditentukan untuk VEEsebesar
-5V dan resistor R3sebesar 680Ω.
= 1 + + + ( + ) −
= ( + )
− − ( + ) +
= 1,25(10000 + 680)
24 − 1,25 − {46 × 10 (10000 + 680)} + (−5)
Pada perhitungan diperoleh nilai resistor R1 sebesar 773,5Ω atau dapat dibulatkan
menjadi 774Ω. Penentuan nilai kapasitor yang digunakan adalah Cin sebesar 0,1uF dan
Cout sebesar 1uF disesuaikan berdasarkan datasheet IC regulator LM317 [12].
3.2.4 Perancangan RangkaianCurrent Booster
Gambar 3.7. RangkaianCurrent Booster
Regulator LM317 hanya mampu mengalirkan arus maksimum sebesar 1,5A, maka
agar dapat mengalirkan arus sebesar 2A diperlukan rangkaian current booster seperti pada
gambar 3.7.
= 1,4
= ∙
=
=1,4
2 = 0,7
Pada perhitungan nilai resistor R diporeh sebesar 0,7Ω, dari hasil tersebut tidak
3.2.5 Rangkaian LCD
Gambar 3.8. Rangkaian LCD [15]
LCD digunakan untuk menampilkan data output dari sensor PIR dan ultrasonik.
LCD yang digunakan adalah LCD 16x2 yang memiliki tipe LMB162A. LCD 16x2 bertipe
ini memungkinkan pemrogram untuk mengoperasikan komunikasi data secara 8bit atau 4
bit. Dalam perancangan ini mode yang digunakan untuk menuliskan data ke LCD
digunakan sebanyak 4bit(mode nibble).PortD.0,portD.1,portD.2 danportD.3 digunakan
sebagai port data, sedangkan portD.4, portD.5 dan portD.6 digunakan sebagai port
pengaturinterfaceLCD.
Berdasarkan datasheet tegangan kontras (Vcc LCD) maksimum sebesar 5VDC,
sehingga dalam perancangan digunakan sebuah resistor variabel sebesar 10KΩ yang
berfungsi untuk membatasi tegangan yang masuk ke pin Vcc LCD. Rangkaian LCD
denganmode4bitditunjukkan pada gambar 3.8.
3.2.6 RangkaianKeypad
Keypad yang digunakan dengan matriks 4x4. Keypad berfungsi sebagai masukan
nilai tegangan yang diinginkan olehuser.Port yang digunakan pada mikrokontroler untuk
baris digunakan sebagaiinput, sedangkanportB.1,portB.3,portB.5, danportB.7 atau port
kolom digunakan sebagaioutput.
Gambar 3.9. Rangkaian keypad 4x4
3.3
Perancangan Perangkat Lunak
3.3.1 Diagram Alir Sistem
Diagram alir sistem ditunjukkan pada gambar 3.10. Program utama menunjukkan
proses perancangan secara keseluruhan. Program di mulai dengan melakukan inisialisasi
port-port mikrokontroler yang digunakan untuk proses yang akan terjadi. Kemudianuser
memasukkaninputtegangan melalui keypad dan keluaran tegangan akan tertampil di LCD,
kemudian program akan dilanjutkan ke bagian proses. Dari bagian proses, dihasilkan
tegangan keluaran yang akan dibandingkan dengan input tegangan apakah sudah sama.
Jika data tersebut belum sama akan kembali ke bagian proses penyetaraan dan jika sudah
Gambar 3.10. Diagram alir sistem
3.3.2 Diagram AlirInputTegangan
Diagram alir input tegangan ditunjukan pada gambar 3.11. Subrutin ini akan
menjelaskan dimana input tegangan yang dimasukkan melalui tombol pada keypad dan
Gambar 3.11. Diagram AlirInputTegangan
3.3.3 Diagram Alir Proses
Diagram alir proses ditunjukkan pada gambar 3.12. Pada diagram alir ini data-data
akan diinisialisaikan kemudian data yang baru akan dibandingkan dengan data awal yang
diberikan dengan nilai 0. Jika data awal lebih kecil dari data baru maka increment data
awal. Jika data awal lebih besar dari data baru maka decrement data awal kemudian
potensiometer digital akan berputar kearah kebalikan. Selanjutnya data akan diberi pulsa
sebesar 100ms. Jika data awal sama dengan data baru maka program selesai. Jika data awal
Gambar 3.12. Diagram Alir Proses
3.3.4 Diagram Alir Proses Penyetaraan
Diagram alir proses penyetaraan ditunjukkan pada gambar 3.13. Diagram alir
proses penyetaraan ini merupakan proses menyamakan tegangan masukan dan tegangan
keluaran yang diharapkan. Pada diagram alir ini tegangan akan dikonversikan ke ADC.
Jika keluaran lebih kecil dari masukan maka kekurangan dari keluaran akan dijumlahkan.
44
BAB IV
HASIL DAN PEMBAHASAN
Bab ini membahas hasil dari alat catu daya digital berbasis mikrokontroler ATmega8535. Hasil pengamatan yang dilakukan berupa tegangan keluaran yang berubah-ubah baik yang tertampil maupun secara terukur dan tingkat keberhasilan alat secara keseluruhan.
4.1 Hasil Implementasi Alat
Implementasi dari alat catu daya digital berbasis mikrokontroler ATmega8535 tersusun atas rangkaian potensiometer digital, sistem minimum ATmega8535, rangkaian LCD 16x2, rangkaiankeypad, dan rangkaian regulator tegangan.
Rangkaian sistem minimum ATmega8535 ditunjukkan pada gambar 4.1. digunakan
untuk mengolah data input seperti keypad, dan pengaturan naik turunnya nilai tegangan pada
potensiometer digital. Rangkaian LCD 16x2 dan rangkaiankeypadsebagai penampil informasi ditunjukan pada Gambar 4.2.
Gambar 4.2. Keypad 4x4 dan LCD 16x2
4.1.1 Rangkaian Potensiometer Digital
Rangkaian Potensiometer digital seperti ditunjukkan pada gambar 4.3. Pada
perancangan rangkaian potensiometer digital menggunakan regulator variable yaitu LM317,
namun implementasinya menggunakanoperational amplifieryaitu LM741.
Alasan tidak menggunakan LM317 karena arus yang masuk ke potensiometer digital
sama dengan penjumlahan Iadj dan IR1 (Ipot.dig = Iadj+ IR1). Saat nilai hambatan potensiometer
digital 10kΩ (nilai hambatan maksimal) tegangan antara Vout dan ground diperancangan
adalah 12V maka:
. =
+ .
. =
12 774 + 10000
. = 1,1
Hasil perhitungan diperoleh arus potensiometer digital sebesar 1,1mA. Potensiometer digital
memiliki karakteristik arus maksimum sebesar 1mA, sehingga hasil perhitungan sudah
melebihi dari arus maksimum.
. =
12 774 + 10
. = 15
Hasil perhitungan diperoleh arus potensiometer digital sebesar 15mA. Arus tersebut sangat
besar dari arus karakteristik potensiometer digital sendiri, sehingga merusak potensiometer
digital.
Gambar 4.3. Rangkaian PCB Potensiometer Digital
Jika menggunakan LM741 potensiometer digital difungsikan sebagai pembagi tegangan. Berdasarkandatasheet diperoleh bahwa beda tegangan maksimum antara RHdan
RLsebesar 8V maka diperlukan penguat menggunakan LM741 agaroutput yang dihasilkan
Gambar 4.4 Rangkaian Potensiometer Digital
4.1.2 Rangkaian Regulator +15 Volt dan -15 Volt
Rangkaian regulator 15 volt dan -15 volt ditunjukkan pada gambar 4.5. Tegangan keluaran rangkaian regulator dilakukan dengan cara mengukur tegangan keluaran menggunakan multimeter. Tabel 4.1. menunjukkan hasil pengujian tegangan keluaran regulator.
Tabel 4.1. Hasil Pengujian tegangan keluaran regulator +15 Volt dan -15 Volt
Regulator Tegangan Keluaran (Volt) Error(Volt)
+15 Volt +15,02 0,02 -15 Volt -15,30 0,30
Berdasarkan tabel 4.1. hasil pengukuran tegangan keluaran rangkaian regulator +15 volt dan -15 volt akan dipergunakan sebagai sumberoperational amplifier. Beda tegangan antara Vcc dan Vee operational amplifier maksimum 15 volt sehingga untuk menurunkan tegangan menggunakan dioda 5 A, tegangan yang dihasilkan seperti tabel 4.2.
Penguat LM741 Buffer
Tabel 4.2. Hasil Penurunan tegangan keluaran regulator +15 Volt dan -15 Volt
Regulator Tegangan Keluaran (Volt) Error(Volt)
+15 Volt +14,32 0,68 -15 Volt -14,68 0,32
Gambar 4.5. Rangkaian Regulator +15V dan -15V
4.2
Data Pengujian Dan Pembahasan
Data pengujian dan pembahasan meliputi tegangan keluaran tanpa beban yang tertampil maupun secara terukur menggunakan multimeter dan arus keluaran saat berbeban secara terukur menggunakan multimeter. Beban yang digunakan adalah beban resistif.
4.2.1 Pengujian Tegangan Keluaran Tanpa beban
Pengujian dilakukan dengan user memasukan nilai tegangan melalui keypad dan hasil tegangan akan tertampil pada LCD dan di ukur menggunakan multimeter. Tabel 4.3 merupakan hasil pengujian tanpa beban.
Hasil pengujian dapat dihitung nilaierrormenggunakan rumus berikut:
Tabel 4.3. Hasil Pengujian Tanpa beban
No Masukan (V) Tampilan (V) Terukur (V) Error(%)
No Masukan (V) Tampilan (V) Terukur (V) Error(%)
119 11.8 11.8 11.7 0.8 120 11.9 11.9 11.9 0.0 121 12.0 12.0 11.9 0.8
JumlahError(%) 146.9
Rata-RataError(%) 1.2
Hasil perhitungan dari rumus error di atas dapat diketahui hasil Jumlah error
sebesar 146,9 % dan jumlah data sebanyak 121 data.
=∑ 121
=146,9% 121 = 1,2%
Hasil perhitungan diperoleherrordata secara keseluruhan sebesar 1,2%.
4.2.2 Pengujian Keluaran Berbeban
Hasil pengujian keluaran arus berbeban ditunjukkan pada tabel 4.4 diperoleh error
arus pada beban 44 Ohm sebesar 18,9% dan pada beban 22 Ohm sebesar 35,2%. Hasil perhitungan di atas berdasarkan rumus:
(%) = ℎ −ℎ × 100
ℎ =
maka
Tabel 4.4 Hasil Pengujian Arus berbeban
No Tegangan
Input(V)
Arus Terukur (mA) Arus Terhitung (mA) Error(%)
44 Ohm 22Ohm 44 Ohm 22Ohm 44 Ohm 22Ohm
1 1 19.1 24.2 22.7 45.5 16.0 46.8 2 2 37.7 55.6 45.5 90.9 17.1 38.8 3 3 55.9 90.5 68.2 136.4 18.0 33.6 4 4 72.9 120.6 90.9 181.8 19.8 33.7 5 5 91.1 149.8 113.6 227.3 19.8 34.1 6 6 110.2 181.9 136.4 272.7 19.2 33.3 7 7 127.9 209.5 159.1 318.2 19.6 34.2 8 8 146.1 240.4 181.8 363.6 19.6 33.9 9 9 164.5 270.6 204.5 409.1 19.6 33.9 10 10 182.1 302.2 227.3 454.5 19.9 33.5 11 11 201.6 332.1 250.0 500.0 19.4 33.6 12 12 219.9 363.8 272.7 545.5 19.4 33.3
JumlahError 227.3 422.6
Rata-RataError(%) 18.9 35.2
Hasil pengujian tegangan terukur ditunjukkan pada tabel 4.5 diperoleh error pada beban 44 Ohm sebesar 0,5% dan error pada beban 22 Ohm sebesar 0,8%. Hasil perhitungan di atas berdasarkan rumus:
(%) = − × 100
ℎ =
![Gambar 2.1. Konfigurasi Pin Mikrokontroler ATmega8535 [3]](https://thumb-ap.123doks.com/thumbv2/123dok/1797764.2098153/22.595.100.527.69.619/gambar-konfigurasi-pin-mikrokontroler-atmega.webp)
![Gambar 2.16. Rangkaian internal LM317 [12]](https://thumb-ap.123doks.com/thumbv2/123dok/1797764.2098153/43.595.97.517.193.628/gambar-rangkaian-internal-lm.webp)
![Gambar 2.17. Rangkaian dasar regulator LM317 [12]](https://thumb-ap.123doks.com/thumbv2/123dok/1797764.2098153/44.595.91.529.85.668/gambar-rangkaian-dasar-regulator-lm.webp)
![Gambar 2.20. Konfigurasi Transistor Darlington [10]](https://thumb-ap.123doks.com/thumbv2/123dok/1797764.2098153/46.595.91.520.77.590/gambar-konfigurasi-transistor-darlington.webp)
![Gambar 3.2. Rangkaian osilator ATmega8535 [5]](https://thumb-ap.123doks.com/thumbv2/123dok/1797764.2098153/48.595.86.528.282.607/gambar-rangkaian-osilator-atmega.webp)
![Gambar 3.3. Rangkaian reset ATmega8535 [5]](https://thumb-ap.123doks.com/thumbv2/123dok/1797764.2098153/49.595.88.523.331.746/gambar-rangkaian-reset-atmega.webp)
