MAKALAH
“ JENIS-JENIS AKTUATOR ELEKTRONIK, PNEUMATIK DAN
HIDROLIK”
Disusun sebagai tugas mata kuliah Mekatronika dan Robotika
Disusun Oleh
Rian Glori Suseno
521 512 2629
PROGRAM STUDI PENDIDIKAN TEKNIK ELEKTRONIKA
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNJ
1
PENDAHULUAN
1.1. Latar Belakang
Perkembangan teknologi dan ilmu pengetahuan mengubah cara pandang manusia dalam menyelesaikan segala urusannya. Pekerjaan-pekerjaan yang sebelumnya tidak dapat dilakukan manusia, kini dapat dilakukan dengan bantuan mesin atau alat. Bukan hanya itu, posisi manusia sebagai pekerja juga dapat digantikan dengan robot atau mesin-mesin otomatis. Sehingga, pekerjaan yang sebelumnya memakan waktu lama, kini dapat dilakukan cepat.
Pada dasarnya gerak robot atau mesin meniru gerakan dari manusia. Salah satu gerakan yang sering ditiru adalah gerakan tangan manusia, yang memiliki pergerakan
pitch, yaw, dan roll. Gerakan seperti ini banyak diaplikasikan pada robot-robot di
industri manufatktur seperti industri trasnportasi, elektronik,dan lain-lain.
Proses yang cepat dan tingkat ketilitian yang tinggi membuat robot banyak dipakai di industri. Hal ini kemudian memicu inovasi-inovasi dalam sistem penggerak pada robot atau mesin. Kemajuan teknologi pada motor elektronik, dan komputer membuat pergerakan yang sebelumnya mustahil dilakukan robot menjadi mungkin untuk dilakukan.
1.2. Perumusan Masalah
Rumusan masalah pada makalah adalah sebagai berikut: 1. Apa yang dimaksud dengan aktuator?
2. Jenis-jenis aktuator?
1.3. Tujuan
Tujuan penulis membuat makalah adalah:
1. Sebagai tugas untuk mata kuliah Mekatronika dan robotika 2. Menjelaskan pengertian aktuator
2
PEMBAHASAN
2.1. Pengertian Aktuator
Sebuah aktuator adalah
fungsional element yang
menghubungkan bagian proses informasi dari sebuah sistem kontrol elektronik dengan teknis atau non-teknis, semisal biologi, proses. Aktuator bisa digunakan untuk mengendalikan aliran energi, massa, atau volume. Satuan dari aktuator disebut energi atau power. Kontrol dari aktuator selalu menggunakan daya elektrik minim, idealnya tanpa mengkonsumsi daya sama sekali.
Gambar 1. Strukur fungsi aktuator
Struktur dari fungsi sebuah aktuator dapat digambarkan dengan komponen dasar yakni “energy
controller”dan “energy converter”
(Gambar 1.). Dimana variabel output dari energy controller merupakan energi yang dihasilkan oleh sebuah
power supply yang dikontrol via
variabel input yang biasanya menggunakan transistor dan katup.
Fungsi utama dari aktuator adalah sebagai komponen penguat dan pengkonversi daya, kemudian menguatkan sinyal kontrol menjadi sinyal baru dengan daya yang besar dan sesuai dengan daya yang dibutuhkan oleh plant.
Gambar 2. Blok diagram closed loop control system.
Klasifikasi aktuator berdasarkan daya
yang dhasilkan ada tiga yakni : - Aktuator elektrik
- Aktuator pneumatik - Aktuator hidrolik
Sedangkan klasifikasi aktuator berdasarkan pergerakan ada dua yakni linier dan berputar.
2.2. Macam-macam aktuator
elektrik
Yang dimaksud dengan aktuator elektrik merupakan aktuator yang mengubah energi listrik menjadi energi gerak dengan menggunakan prinsip elektromagnet. Ada beberapa
macam aktuator elektrik yang linier dan rotasi, diantaranya:
Aktuator Elektrik Linier 1. Selenoid
Selenoid merupakan aktuator linier, biasanya digunakan untuk gerakan
short stroke (pukulan pendek).
Selenoid terbuat dari lilitan tembaga, plunger,dan cangkang besi.
Gambar 3. Konstruksi selenoid
Untuk menghemat penggunaan energi, biasanya selenoid
menggunakan pegas untuk
membalikkan posisi plunger dalam keadaan awal.
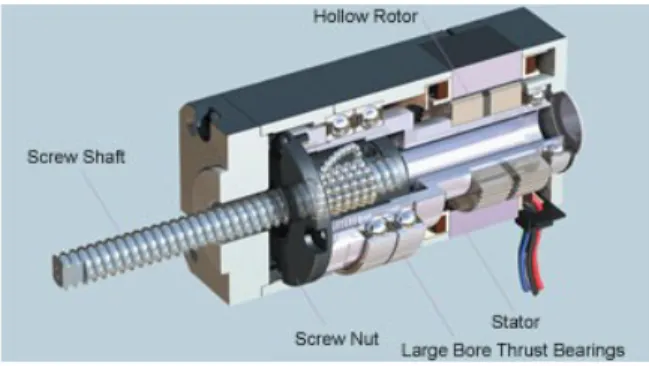
Gambar 4. Bentuk fisik selenoid 2. Motor and ball screw
Merupakan aktuator linier menggunakan electric motor, seperti
servomotor dan screw jack dengan
bola yang bersikulasi ulang (reciculating). Salah satu keunggulan dari aktuator jenis ini adalah gaya
yang dihasilkan cukup besar.
Gambar 5. Konstruksi dari motor and ball screw.
3. Motor and lead screw
Memiliki cara kerja yang sama dengan motor and ball screw, perbedaanya terletak pada pergeseran lebih tinggi yang dihasilkan pada
screw. Aktuator jenis ini memiliki
efisiensi yang kurang bagus, sekitar dibawah 25%.
Gambar 6. Bentuk fisik dari motor and screw.
Aktuator Elektrik Rotasi 1. Motor DC
Motor DC merupakan motor yang menggunakan arus DC untuk membuat gaya magnetic, sehingga menggerakan poros (shaft).
Ada dua bagian terpenting pada motor DC yakni rotor bagian yang bergerak dan stator bagian yang tak bergerak.
Gambar 7. Konstruksi sederhana
motor DC
Cara kerja dari sebuah DC Motor adalah dengan mengalirkan arus melalui brushes, yang kemudian diterima oleh comutator sehingga menghasilkan medan magnet pada
coil. Perbedaan polaritas antara gaya
magnet dengan coil, menyebabkan rotor bergerak.
Gambar 8. Bentuk fisik motor DC. 2. Motor AC
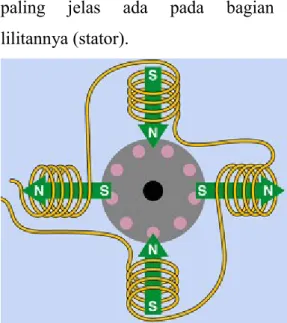
Motor AC merupakan motor yang bergerak menggunakan sumber arus AC. Memiliki bagian yang sama dengan motor DC, yakni stator dan rotor, akan tetapi memiliki cara kerja yang berbeda. Perbedaanya yang
paling jelas ada pada bagian lilitannya (stator).
Gambar 9. Representasi dari sebuah
motor AC sederhana.
Arus AC mengalir melalui satu atau lebih lilitan pada stator, menghasilkan medan magnet berfluktuasi yang akan tarik menarik dengan rotor, sehingga rotor dapat bergerak.
Gambar 10. Bentuk fisik dari motor
AC.
3. Motor Stepper
Stepper motor bekerja berdasarkan pulsa-pulsa listrik. Setiap kali mengirim pulsa ke pengontrol elektronik, maka motor akan bergerak ‘selangkah’, yaitu satu putaran sudut kecil.
Ada dua jenis stepper motor yang banyak dipakai, yakni Bipolah stepper motor dan unipolar stepper motor.
Bipolar stepper motor bekerja dengan menggunakan satu lilitan penuh pada setiap bagian stator untuk melakukan gerak satu langkah.
Gambar 12. Konstruksi bipolar stepper
motor.
Ciri-ciri dari bipolar stepper motor, adalah terdapat empat kabel sebagai media transfer arus.
Gambar 13. Bentuk fisik bipolar stepper
motor.
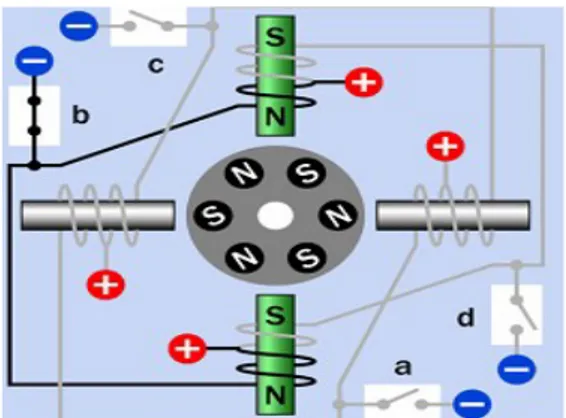
Sedangkan unipolar stepper motor, bekerja dengan menggunakan setengah dari lilitan pada setiap statornya.
Sehingga kabel yang disediakan pada unipolar stepper motor biasanya lebih dari empat. Dimana terdapat sebuah common, yang dapat diberikan ke ground atau VCC.
Gambar 14. Konstruksi Unipolar stepper
motor.
Salah satu keunggulan dari unipolar stepper motor adalah penggunaan daya yang rendah disebabkan hanya menggunakan setengah coil.
Gambar 15. Bentuk fisik unipolar
stepper motor.
4. Servo Motor
Servo motor merupakan kombinasi dari motor, gear box, dan rangkaian kontrol elektronik yang dibungkus bersama pada satu tempat.
Gambar 16. Bentuk fisik servo motor.
Motor dapat bergerak dengan tegangan AC atau DC,
namun biasanya orang-orang menggunakan motor servo dengan sumber DC.
Servo motor pada dasarnya dikendalikan via pulse width modulation (PWM). Sebagai contoh untuk jenis servo kecil pada RC. Pulsa yang mengendalikan di atur pada frekuensi konstan yakni 20ms, dengan durasi keadaan positif pada setiap pulsanya akan mengatur posisi dari motor, dan lembah diantara pulsa tidak dihiraukan. Jangkauan dari lebar pulsa untuk motor yang kecil adalah 1 ms sampai 2 ms, dengan spesifikasi jangkauan -90 sampai +90 derajat berdasarkan titik tengahnya.
Gambar 17. Posisi dari gerak servo
motor yang dikendalikan dengan lebar pulsa.
Berdasarkan rotasi, terdapat dua jenis servo, yakni servo yang dapat bergerak sebesar 180 derajat dan 360 derajat.
2.3. Macam-macam aktuator Hidrolik
Pada tahun 1653, ilmuwan Blaise Pascal menyatakan teori: “apabila tekanan
eksternal dikenakan ke sejumlah fluida (bisa gas ataupun cairan), maka tekanan tersebut akan dipindahkan seluruhnya ke semua bagian dari fluida tersebut.
Gambar 18. Ilustrasi sederhana tentang
aktuator hidrolik. Sehingga di dapat persamaan
Aktuator linier Hidrolik 1. Hidrolik cylinder
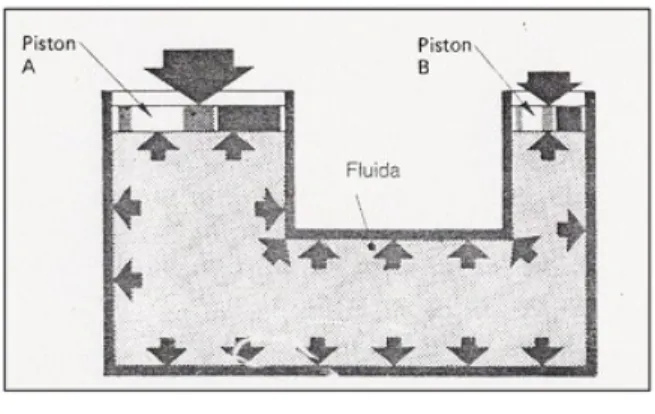
Merupakan jenis aktuator hidrolik yang sering digunakan untuk gerakan linier untuk beban-beban yang berat yang tidak mampu dilakukan oleh aktuator pneumatic, semisal rams.
Gambar 19. Bentuk fisik dari hidrolik
Pada jenis cylinder yang praktis, cara kerjanya adalah dengan memberikan fluida pada silinder, dan terdapat piston B sebagai input dan piston A sebagai output.
Gambar 20. Cylinder Praktis
Untuk menghemat penggunaan energi, terdapat jenis cylinder yang menggunakan pegas.
Gambar 21. Cylinder berpegas.
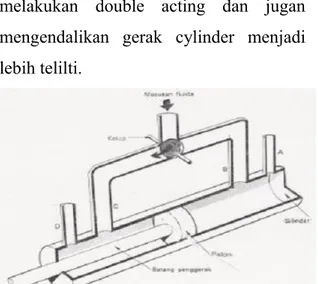
Untuk melakukan gerakan linier secara dua arah, terdapat cylinder dengan katup transfer hidrolik. Sehingga cylinder dapat melakukan double acting dan jugan mengendalikan gerak cylinder menjadi lebih telilti.
Gambar 22. Cylinder dengan katup
Selain itu, keunggulan aktuator ini adalah tingkat presisi yang tinggi, sampai dengan 0.01mm.
2.4. Macam-macam aktuator pneumatik
Jika hidrolik menggunakan fluida dalam bentuk cairan, pneumatik menggunakan udara yang ternyata memilki kaidah yang sama dalam hubungnnya dengan gaya dan luas area. Perbedaanya adalah bahwa udara yang ditekan atau dimampatkan, volumenya akan berubah. Maka, untuk membangkitkan tekananan yang dibutuhkan dalam pengoperasian piston, pompa harus melakukan pekerjaan tambahan yaitu memampatkan udara.
Aktuator linier Pneumatik 1. Pnumatic rams : rod type
Merupakan jenis aktuator linier dengan
single acting push or pull. Jenis aktuator
ini dapat bekerja menahan.
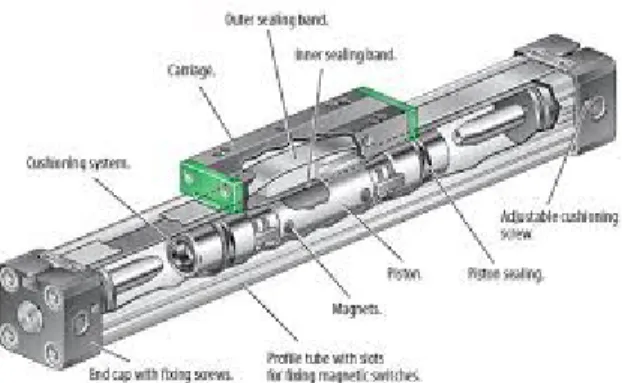
Gambar 23. Pneumatic Rams: rod type. 2. Pneumatic rams: rodless type
Alat ini diperkenalkan sekitar beberapa tahun yang lalu. Perbedaan tipe rod dengan rodless, terletak pada piston yang digerakkan. Pada tipe rodless, piston yang digerakkan ada dua, sehingga dapat melakukan double action.
Gambar 24. Rodless air cylinder.
Konstruksi dari aktuator jenis ini adalah slot pada sisi dari cylinder yang dibungkus dengan sebuah elastomeric seal backed dan juga sebuah potongan stainless steel yang fleksibel yang dipindahkan oleh lintasan dari piston dan carrier (pengangkut).
Gambar 25. Bentuk fisik rodless type 3. Pneumatic diapraghms
Diapragm aktuator digunakan dimana udara yang menekan pada tingkat medium,
Gambar x. Diapragm pneumatic actuator
atau dengan kata lain untuk keamanan pada lingkungan sekitar dimana bahaya mungkin bisa terjadi.
3
KESIMPULAN
3.1. Kesimpulan
Aktuator merupakan komponen penggerak pada sebuah sistem kontrol, berfungsi sebagai komponen penguat dan pengkonversi daya, kemudian menguatkan sinyal kontrol menjadi sinyal baru dengan daya yang besar dan sesuai dengan daya yang dibutuhkan oleh plant.
Terdapat 3 jenis aktuator berdasarkan energi penggeraknya, yakni jenis aktuator hidrolik, elektrik, dan pneumatik. Dan berdasarkan geraknya, terdapat jenis aktuator linier dan rotasi.
Aktuator elektrik, merupakan aktuator yang mengubah energi listrik menjadi energi gerak dengan menggunakan prinsip elektromagnet. Sedangkan akuator hidrolik, merupakan jenis aktutor yang menggunakan prinsip fluida yang
incompressible. Lalu aktuator pneumatik, sama halnya dengan aktuator hidrolik, tapi
Daftar Pustaka
D.A Bradley, D. Dawson, N.C. Burd, A.J. Loader, Mechtatronics: Electronics in
products and processes, ______ , Springer.
Platt, Charles, Encyclopedia of electronic components Volume 1, 2013, O’Reilly Media, Inc : Sebastopol.