RANCANG BANGUN SISTEM PEMBERI MAKAN
HEWAN PELIHARAAN OTOMATIS BERBASIS IOT
DENGAN SUMBER ENERGI ALTERNATIF
Christian Eka Wijaya
11Teknik Elektro - Universitas Pertamina Kebayoran lama, Jakarta Selatan , 12230, Indonesia
Abstract— Keeping pets is a necessity and a lifestyle. High levels of busyness cause various problems in pets, one of them is obesity. Based on data compiled by Banfield pet hospital, there was an increase in obesity cases that occurred in cats by 169% and 158% in dogs between 2007-2016. This case continued to increase due to the irregular and uncontrolled diet of animals according to the portion. . This design of a pet feeder system can be controlled through the Blynk application on a Smartphone and uses solar radiation energy as its main resource. The main purpose of this design is to make the pet owners easier in terms of providing regular scheduled meals according to their portions. The method used of the system is Internet of Thing (IoT). The results of this design show that the system can work well on 3G and 4G network connections, the system can issue food in the appropriate portion as ordered with an average error <2%. By using a battery with a capacity of 12 V 7 Ah, the battery is able to supply power up to 3 days without recharging. keywords— Blynk, Solar Energy, IoT.
Intisari— Memelihara hewan peliharaan merupakan sebuah
kebutuhan dan gaya hidup. Tingkat kesibukan yang tinggi menyebabkan berbagai macam masalah pada hewan peliharaan, salah satunya obesitas. Berdasarkan data yang dihimpun oleh Banfield pet hospital, terjadi peningkatan kasus obesitas yang terjadi pada hewan kucing sebesar 169% dan 158% pada hewan anjing dalam kurun waktu 2007 – 2016. Kasus ini terus meningkat akibat dari pola makan hewan yang tidak teratur dan tidak terkontrol sesuai porsinya. Perancangan ini merancang tentang sistem pemberi makan hewan peliharaan yang dapat dikendalikan melalui aplikasi Blynk pada Smartphone dan menggunakan energi radiasi matahari sebagai sumber daya utamanya. Tujuan dari perancangan ini yaitu untuk memudahkan pemilik hewan peliharaan dalam hal memberi makanan yang terjadwal teratur dan sesuai porsinya. Metode yang dipergunakan adalah Internet of Thing (IoT). Hasil dari perancangan ini menunjukan bahwa sistem dapat bekerja dengan baik pada koneksi jaringan 3G dan 4G, sistem dapat mengeluarkan makanan dengan porsi yang sesuai dengan yang diperintahkan dengan rata – rata error < 2%, dengan menggunakan baterai berkapasitas 12 V 7 Ah baterai mampu untuk menyuplai daya sistem hingga 3 hari tanpa recharge.
Kata Kunci— Blynk, radiasi matahari, IoT. I. PENDAHULUAN
Kegemaran manusia untuk memelihara hewan peliharaan seperti kucing atau anjing sudah bukan lagi didasarkan oleh kegemaran semata, saat ini memelihara hewan sudah merupakan bagian dari kebutuhan masyarakat perkotaan yang
keamanan [1]. Kebutuhan manusia dalam memelihara hewan peliharaan belum sepenuhnya memperhatikan perawatan hewan peliharaan tersebut, hal ini dibuktikan dengan 25% sampai 40% hewan peliharaan seperti kucing menujukan tanda kelebihan berat badan [2].
Aktivitas yang padat yang dimiliki oleh pemilik hewan peliharaan cenderung membuat pemilik hewan meletakan makanan yang berlebih bagi hewan peliharaannya. Hal ini bertujuan agar hewan peliharaan tidak kekurangan makanan ketika hendak ditinggal beraktivitas oleh pemiliknya [2]. Kegiatan tersebut tidak sepenuhnya baik bagi hewan peliharaan karena merujuk pada kasus overfeeding dan berakhir pada kasus obesitas. Berdasarkan KBBI, obesitas merupakan kondisi terjadinya penumpukan lemak berlebih didalam badan. Dalam dunia hewan, obesitas merupakan salah satu penyebab utama datangnya penyakit, seperti arthritis, diabetes dan permasalahan cardiovascular lainnya.
Obesitas pada hewan peliharaan merupakan salah satu permasalahan yang sering dialami oleh hewan peliharaan yang kurang diperhatikan asupan gizinya. Berdasarkan data yang diperoleh dari Banfield Pet Hospital [3], sepertiga kucing dan anjing yang terdata di Amerika Serikat mengalami masalah kegemukan (overweight). Dalam penelitian yang dilakukan, kasus kegemukan yang dialami oleh hewan peliharaan terus meningkat hingga mencapai angka 169% pada kucing dan 158% pada anjing selama periode tahun 2007-2016. Kasus kegemukan pada hewan terus meningkat dikarenakan kurangnya pengetahuan pemilik hewan peliharaan terhadap porsi makan yang sesuai bagi hewan sehingga sering terjadi kasus overfeeding dan berakhir pada kasus obesitas.
Kasus obesitas pada hewan peliharaan juga terjadi di Indonesia, berdasarkan penelitian yang dilakukan oleh Triakorso dan Isnaini [4], angka prevalensi obesitas pada hewan anjing peliharaan di Surabaya pada tahun 2012 sebesar 9,09% atau sekitar 30 ekor anjing dari 330 ekor anjing yang diperiksa. Sebaran data obesitas tersebut dipetakan menjadi, anjing kecil 7,46%, anjing sedang 12,04% sedangkan anjing besar 9,52%.
Untuk mengurangi angka kasus obesitas yang terjadi pada hewan peliharaan, diperlukan beberapa langkah konkrit yang harus dilakukan. Salah satu langkah tersebut adalah dengan mengatur pola makan hewan peliharaan tersebut sesuai jadwal dan porsinya. Setiap jenis hewan peliharaan, baik kucing atau anjing memiliki takaran gizi yang berbeda – beda. Oleh sebab
sesuai dengan porsi yang dibutuhkan dan tepat pada waktu yang telah ditentukan.
Untuk mengatasi permasalahan yang timbul dari waktu pemberian makanan pada hewan peliharaan, dibuat suatu desain sistem pemberian makanan otomatis pada hewan peliharaan yang berbasis pada Internet of Things (IoT) dengan sumber tenaga alternatif, yaitu daya dari panel surya. Sistem yang akan dirancang ini diharapkan mampu untuk mengatasi pemasalahan yang dialami oleh pemilik hewan peliharaan dalam hal penjadwalan pemberian makanan terhadap hewan peliharannya.
Sumber energi alternatif menggunakan panel surya dipilih karena dinilai praktis, compact, mudah digunakan dan minim perawatan. Banyaknya ketersedian modul panel surya di pasar Indonesia juga menjadi salah satu pertimbangan. Alasan lain yang mendukung adalah posisi geografis Indonesia yang berada dekat dengan garis katulistiwa menyebabkan jumlah energi matahari yang diserap akan lebih banyak dibandingkan dengan negara dibagian utara atau selatan
II. TUJUAN
Desain sistem pemberi makan hewan peliharaan otomatis ini memiliki tujuan untuk dapat memberikan makanan pada hewan secara otomatis sesuai dengan jadwal yang ditentukan atau pada kondisi tertentu pengguna dapat memberikan mengeluarkan makanan secara real-time. Kuantitas makanan yang keluar akan terjaga sesuai inisiasi berat awal yang ditentukan. Proses pemberian makanan secara real-time dapat dilakukan dengan memberikan perintah melalui aplikasi yang sudah terinstal pada smartphone. Aplikasi yang terdapat pada smartphone akan tekoneksi dengan mikrokontroler melalui media internet.
Sumber daya yang digunakan oleh sistem ini merupakan sumber daya dari energi alternatif dari iradiasi matahari yang diserap menggunakan panel surya yang kemudian disimpan dalam baterai. Dengan sistem ini proses pemberian makanan pada hewan peliharaan dapat dilakukan secara otomatis dan kontrol jarak jauh. Sehingga dengan menggunakan sistem pemberi makan hewan peliharaan otomatis ini pemilik sudah tidak perlu lagi menitipkan hewan peliharaannya ketika hendak berpergian dalam waktu yang lama (2-3 hari).
III. RUMUSAN MASALAH
Berdasarkan uraian pada bagian pendahuluan, dapat dirumuskan beberapa permasalahan, antara lain:
1. Bagaimana cara untuk membuat sistem pemberian makan hewan peliharaan secara otomatis? .
2. Bagaimana membuat sistem pemberi makan hewan peliharaan yang dapat dikontrol dari jarak jauh?
3. Bagaimana proses pemanfaatan sinar matahari untuk dijadikan sumber energi listrik utama?
4. Bagaimana membuat sistem pemberi makan hewan peliharaan yang dapat dikontrol dari jarak jauh?
IV.BATASAN MASALAH
1. Jenis makanan yang digunakan merupakan makanan kering kecil dengan diameter tidak lebih dari 1cm perbutirnya.
2. Sumber tenaga alternatif yang digunakan merupakan energi matahari dengan media baterai sebagai tempat penyimpanannya.
3. Sistem ditempatkan pada suatu ruangan yang terdapat koneksi internet yang memadai.
4. Sebuah sistem pemberi makan hewan digunakan untuk sebuah kandang dengan kapasitas maksimal satu hewan peliharaan.
5. Kapasitas penyimpanan energi pada baterai cukup untuk menyediakan daya bagi sistem minimal 2 hari tanpa pengisian ulang (charging).
6. Panel surya diletakan pada posisi yang tetap (fix) di atap kandang
.
V. TINJAUAN PUSTAKA A. Kajian Pustaka
Berdasarkan artikel ilmiah yang ditulis oleh Chung- Ming Own [5], secara teknis struktur IoT diturunkan menjadi tiga bagian utama, yaitu hardware devicelayer, layer ini berisikan komponen output yang bertugas sebagai aktuator dari sistem IoT. Selanjutnya infrastructure layer, yaitu layer yang berisikan bahasa pemprograman yang digunakan untuk menjalankan sistem IoT sesuai dengan input dan kehendak yang diinginkan. Yang terakhir yaitu application layer, bagian ini merupakan bagian interface yang berhubungan langsung dengan pengguna. Bagian ini menyediakan layanan informasi yang diperlukan pengguna dari sistem yang telah dibuat. Alat pemberi makan hewan yang dibuat pada artikel ini memiliki beberapa keunggulan, yaitu alat menggunakan sensor RFID sehingga tempat makan dapat terbuka kapan saja ketika RFID tag mendekati RFID reader, dapat merekam dan memutar suara pemilik pada alat yang digunakan dan dapat bekerja secara otomatis tanpa memerlukan scheduler atau remote untuk mengeluarkan makanan. Selain memiliki beberapa keunggulan, alat ini juga terdapat kelemahan yaitu, jadwal pemberian makanan pada hewan menjadi tidak teratur, sehingga tetap dapat menyebabkan hewan peliharaan menjadi obesitas, diperlukan waktu untuk melatih hewan peliharaan agar mengetahui tempat makannya.
Berdasarkan jurnal ilmiah yang ditulis oleh Edi Susanto [6], Rancang bangun alat pemberi makan hewan otomatis yang dibuat oleh penulis menggunakan data input dari SMS yang dikirimkan oleh pengguna (user) pada alat. Alat ini dibuat dengan menggunakan mikokontroler ATmega16, dengan modem GSM sebagai penerima (receiver) pesannya. Keunggulan rancang bangun yang dibuat ini yaitu memiliki tingkat kepresisian keluaran makanan yang hampir sempurna dan time delay antara waktu pengguna mengirimkan perintah melalui SMS pada alat dengan alat merespon perintah tersebut terbilang singkat (<1 menit). Namun alat yang dibuat ini memiliki beberapa kelemahan, yaitu perintah yang harus dikirimkan lewat SMS harus sama persis dengan yang telah
disimpan pada database, jadi apabila ada kesalahan penulisan sehingga membuat perintah yang dikirimkan tidak sesuai dengan database maka alat tidak akan memproses apapun.
Berdasarkan laporan tugas akhir yang ditulis oleh Dany Koswara [7], Metode rancang bangun yang dibuat menggunakan media Bluetooth dalam media pengendaliannya. Modul Bluetooth yang digunakan adalah HC-06 yang memiliki jangkauan pada radius 7 meter. Bluetooth tersebut akan menjadi media penghubung antara smartphone pengguna dengan mikrokontroler yang digunakan. Pada penerapannya, pengendalian dengan media Bluetooth ini memiliki sebuah kelemahan, yaitu koneksi akan terputus apabila jarak antara smartphone dan mikrokontroler melebihi 7 meter
Berdasarkan jurnal konferensi internasional yang ditulis oleh Andi Ardiansyah [8], metode rancang bangun yang dibuat menggunakan IoT berbasis web server dengan sensor tambahan yaitu sensor ultrasonik HC-SR04. Sensor HC-SR04 berfungsi untuk memastikan bahwa makanan yang tersimpan pada tempat penyimpanan akan keluar ketika binatang perliharan sedang tidak berada pada radius 5cm. Penggunaan web server pada perancangan ini bertujuan untuk memberikan informasi mengenai sisa cadangan makanan, posisi motor servo, konektivitas dan lainnya. Berdasarkan saran yang dituliskan oleh penulis, alat ini masih perlu dikembangkan. Pengembangan itu misalnya menambahkan sensor kesehatan hewan, pemberian air minum bagi hewan peliharaan, menggunakan kontroler Raspberry PI sehingga standby PC sudah tidak diperlukan lagi.
Berdasarkan beberapa kajian pustaka yang telah dilakukan, maka akan dirancang sebuah sistem pemberian makanan hewan peliharaan otomatis yang berbasis IoT. Pengontrolan berbasis IoT dipilih agar pengontrolan ini tidak terbatas pada jarak seperti halnya Bluetooth atau Inframerah. Sistem ini akan akan menggunakan smartphone sebagai media remot untuk mengontrol kapan pemberian makan harus dilakukan. Media penghubung yang digunakan yaitu aplikasi open source Blynk App yang sudah diprogram agar dapat terkoneksi dengan NodeMCU. Aplikasi Blynk dipilih untuk digunakan karena dinilai lebih praktis dibandingkan menggunakan web server. Untuk sistem sumber daya, dipilih sumber daya alternatif yaitu pembangkit listrik tenaga surya. Pemilihan sel surya bertujuan untuk membuat sistem ini tidak bergantung pada suplai listrik dari PLN.
B. Produk Serupa Pada Pasar Daring Indonesia
Pada gambar 1 merupakan salah satu contoh produk sistem pemberi makan hewan peliharaan otomatis yang dijual di pasar daring Indonesia. Alat ini memiliki kelebihan yaitu porsi penyajian yang dapat diatur untuk setiap pemberian makan, memiliki kapasitas tempat penyimpanan makanan sebesar 5,5 liter, tersedia alat perekam suara dan tersedia jam digital yang ditanamkan pada LCD. Adapun kekurangan dari alat ini adalah tidak adanya indikator dari berat makanan yang tersisa pada tempat penyimpanan makanan, tidak bisa dikontrol secara otomatis, sumber daya listrik utama menggunakan baterai sekali pakai dan tidak ada pemberitahuan ketika
cadangan makanan pada tempat penyimpanan akan habis. Alat ini dijual dengan harga 685.000
Gambar 1 Programmable LCD Automatic Dog & Cat Feeder [9]
Pada gambar 2 merupakan salah satu alat pemberi makan hewan peliharaan otomatis lainnya yang dijual pada pasar daring Indonesia. Kelebihan dari alat pemberi makan hewan otomatis ini adalah sistem pengontrolannya dapat dilakukan secara jarak jauh dengan menggunakan aplikasi dan wifi, terdapat night vision sehingga memberikan kesan mewah, memiliki kapasitas penyimpanan mencapai 6 liter, terdapat dua mode yaitu otomatis dan manual. Adapun kekurangan dari alat pemberi makan ini adalah alat tidak dapat memberikan notifikasi pada pengguna ketika cadangan makanan akan habis, harga alat yang mahal.
Gambar 2 PETECC PF-02 - Automatic Smart Pet Feeder [10] Pada gambar 3 merupakan salah satu alat pemberi makan hewan peliharaan otomatis lainnya yang dijual pada pasar daring Indonesia. Kelebihan dari alat pemberi makan hewan otomatis ini adalah dapat melakukan pemberian makanan sesuai jadwal yang ditentukan, dapat memberikan makanan sesuai porsi yang ditentukan, dapat memutarkan rekaman suara. Adapun kekurangan dari alat pemberi makan ini adalah alat tidak dapat memberikan notifikasi pada pengguna ketika cadangan makanan akan habis, harga alat yang mahal yaitu sebesar Rp. 2.291.000
Gambar 3 Alat Pemberi Makan Otomatis Ukuran 4,25 L [11]
C. Sistem Panel Surya
Prinsip kerja panel surya adalah mengkonversi sinar radiasi matahari menjadi energi listrik melalui material semikonduktor. Sinar radiasi yang menabrak (penetrate) material silikon akan menyebabkan terjadinya efek fotoelektrik pada sel surya, hal ini menyebabkan terdapatnya elektron bebas pada persimpangan P-N (P-N Junction). Elektron bebas tersebut akan bergerak akibat dari medan elekrik yang terjadi pada pesimpangan P-N. Elekron bebas yang mengalir pada sel surya akan disalurkan pada kepingan metal, ketika kepingan metal tersambung pada beban, maka arus listrik akan mengalir menuju beban tersebut [12]
Gambar 4. Sel Surya [13]
Pada umumnya, terdapat 3 tipe panel surya yang beredar dipasaran, perbedaan tersebut terdapat pada bahan silikon yang digunakan, yaitu amorphous silicon modules, monocrystaline solar cells dan polycrystalline solar cells. Pada pembuatan sistem pemberi makan hewan otomatis dengan sumber energi alternatif ini, digunakan panel surya dengan tipe polycrystalline solar cells yang memiliki rata –rata efisiensi 12-14% [12].
Gambar 5. Hiraraki Panel Surya [12]
D. Media Penyimpanan Panel Surya.
Sebagai media penyimpanan energi dari panel surya, jenis baterai yang paling cocok digunakan berjenis deep cycle VRLA. Baterai deep cycle merupakan baterai yang dirancang untuk menghasilkan arus listrik yang lebih stabil dan tahan lama. Baterai ini memiliki keunggulan yaitu bebas perawatan dan tahan terhadap pelepasan (discharge) – pengisian (charge) yang berulang –ulang
Gambar 6. Baterai VRLA deep cycle [14] E. Kapasitas Baterai
Kapasitas baterai yang dijual biasanya dikelompokan dengan satuan Ampere hour (Ah) yang menyatakan besaran arus yang dapat dikeluarkan oleh baterai tersebut setiap jamnya. Sedangkan besarnya tegangan yang dikeluarkan oleh baterai berupa tegangan dengan nominal 12/24/48 Volt sesuai dengan spesifikasi baterai yang digunakan. Untuk menentukan besarnya kapasitas baterai yang digunakan, berlaku persamaan:
Kapasitas (Wh)= beban(Wh) × Hari tanpa matahari Efisiensi Muatan
(2.1)
Berdasarkan [15], efisiensi muatan yang digunakan adalah 80%. Kapasitas baterai dalam satuan Ah didapatkan setelah membagi total daya per jam dengan tegangan baterai.
Kapasitas Baterai (Ah)= Total beban (Wh) Tegangan baterai
(2.2)
Beban yang digunakan pada perhitungan ini merupakan daya per jam (watt hour), daya ini didapatkan dari hasil kali tegangan, arus dan durasi penggunaan setiap komponen yang terhubung ke baterai. Untuk mendapatkan energi yang dibutuhkan setiap komponen elektronika, digunakan persamaan 2.3 berikut.
Energi (Wh) = Tegangan (V) × Arus (I) ×Waktu (h) (2.3) Total beban merupakan akumulasi dari setiap daya yang digunakan oleh setiap kompenen yang terhubung ke Solar Charge Controller (SCC). Berdasarkan [15], total beban aktual yang didapatkan dari setiap komponen harus ditambahkan 20% sebagai besaran rugi-ruginya
F. Spesifikasi Panel Surya dan Solar Charge Controller Watt Peak (WP) merupakan satuan yang menyatakan daya tertinggi yang dapat dihasilkan oleh panel surya setiap jam. WP akan tercapai ketika cuaca cerah dan sinar matahari dalam kondisi penetrasi maksimum. Semakin besar WP yang dimiliki oleh panel surya, maka kemampuan panel surya untuk mengisi daya baterai juga semakin cepat. Untuk mendapatkan hubungan antara spesifikasi panel surya dengan waktu dituntukan pada persamaan 2.5 berikut.
Waktu (h)= Kapasitas Baterai (Wh) Watt Peak (Wp)
(2.5) Daya yang masuk pada panel surya merupakan energi yang didapatkan dari iradiasi matahari. Besaran iradiasi yang mampu diserap oleh panel surya merupakan hasil kali dari iradiasi dengan luas area panel surya yang digunakan. Persamaan matematis daya yang masuk pada panel surya ditunjukan pada persamaan 2.6 berikut
Pin (W) = Iradiasi ( W m⁄ 2) × Luas Panel Surya (m2) (2.6) Daya yang keluar dari panel surya merupakan listrik arus searah. Besaran listrik arus searah ini dapat ditemukan dengan mengalikan tegangan dengan arusnya seperti yang ditunjukan pada persamaan 2.7 berikut
Pout (W) = Tegangan (V) × Arus (A) (2.7)
Efisiensi panel surya merupakan rasio dari daya yang masuk pada panel surya dan daya yang dikeluarkan oleh panel surya. Untuk mengetahui efisiensi dari panel surya yang digunakan dapat dilakukan dengan membagi daya yang keluar pada panel surya dengan daya yang masuk pada panel surya seperti yang ditunjukan pada persamaan 2.8 berikut:
Efisiensi(η)= Daya Keluar (W)
Daya Masuk (W)× 100%
(2.8)
SCC adalah rangkaian elektronik yang mengatur proses pengisian daya baterai dari dari panel surya. Tegangan DC yang dihasilkan oleh panel sel surya umumnya akan bervariasi sesuai dengan penetrasi radiasi matahari dan kondisi lainya oleh sebab itu diperlukan kontroler sebagai alat pengatur tegangan baterai agar tidak melampaui batas toleransi dayanya. Fungsi lain dari SCC yaitu untuk mencegah pengaliran arus dari baterai mengalir kembali ke panel sel surya ketika proses pengisian sedang tidak berlangsung sehingga baterai yang sudah terisi tidak terkuras lagi dayanya. Apabila baterai sudah penuh terisi, maka aliran DC dari panel surya akan diputuskan untuk menghindari baterai menjadi overcharge yang dapat berdampak pada berkurangnya usia baterai.
G. Load cell
Load cell merupakan suatu sensor elektronika yang dapat mengubah sebuah tekanan atau berat menjadi sinyal digital. Load cell merupakan komponen utama yang digunakan pada timbangan digital saat ini. Pada load cell terdapat elemen logam yang dapat menimbulkan tegangan akibat berat beban. Regangan tersebut akan dikonversi kedalam sinyal elektrik oleh strain gauge yang terpasang pada load cell. Pada
perancangan sistem ini digunakan load cell tipe TAL 220B. Load cell memiliki kapasitas timbang maksimum sebesar 5 kg.
Gambar 7. Load Cell TAL220B [16]
Pada perancangan sistem menggunakan sensor berat ini, dibutuhkan besaran faktor kalibrasi untuk menyesuaikan pembacaan berat dari sensor berat dan pembacaan berat dari timbangan konvensional. Besaran faktor kalibrasi setiap Load Cell akan berbeda sesuai tempat implementasinya dan merek Load Cell yang digunakan. Dikarenakan nilai faktor kalibarasi yang dapat dibaca oleh program berupa integer, maka sering terjadi perbedaan pembacaan berat antara sensor berat dengan berat konvensional. Oleh sebab itu, digunakan rumus pencarian galat untuk mendapatkan presentase error yang terjadi.
Error= | Berat sebenarnya-Berat terukur|
Berat sebenarnya ×100%
(2.9)
Sedangkan untuk menghitung jumlah dari rata – rata error yang terjadi, dapat digunakan rumus perhitungan rataan pada umumnya, yaitu :
Rataan = 𝑥1+𝑥2+𝑥3+⋯+𝑥𝑛
n (2.10)
Dimana, x = Data error n = Banyaknya data H. ADC HX711
Modul ADC HX711 adalah suatu modul yang mengubah nilai analog yang didapat dari load cell menjadi nilai digital yang bisa di-interface dengan Arduino. Daya yang digunakan untuk mengoperasikan modul ini adalah 5Vdc.
I. Arduino Uno
Arduino Uno merupakan development board berbasis mikrokontroler ATmega 328P. Board mendapatkan tegangan dari komputer melalui kabel USB atau dari adaptor dan/atau baterai melalui kabel adaptor AC/DC. Bila cara pertama digunakan, maka board bisa tersambung ke komputer dimana pengguna dapat melakukan coding menggunakan software Arduino IDE untuk konfigurasi software board.
J. NodeMCU DEVKIT
NodeMCU DEVKIT adalah development board menggunakan modul System-on-Chip (SoC) Wi-Fi ESP8266 sebagai komponen utamanya. NodeMCU DEVKIT merupakan sebuah perangkat keras buatan Espressif System. NodeMCU dirilis pertama kali pada 30 Desember 2013, sejak awal rilis, NodeMCU terus mengalami penyempuranaan – penyempurnaan. NodeMCUmerupakan sebuah mikrokontroler yang menyerupai Arduino.
Gambar 9. NodeMCU [19] K. Blynk App
Blynk merupakan sejenis IoT platform yang berfungsi sebagai dashboard digital yang bisa mengendalikan berbagai jenis perangkat melalui internet. Perangkat yang dimaksud termasuk mikrokontroler seperti Arduino, Raspberry Pi, dan NodeMCU. Pengendalian perangkat ini dilakukan oleh sebuah aplikasi pada smartphone pengguna yang tersambung dengan internet
K. Motor Servo
Motor servo merupakan sejenis motor DC yang menggunakan sistem umpan balik di mana posisi rotor akan di-info ke rangkaian kendali pada servo. Servo terdiri dari motor DC, serangkaian gigi, potensiometer untuk menentukan batas sudut putaran servo, dan rangkaian kendali. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor servo.
L. Diagram Alir Sistem Program Pemberian Makanan Otomatis Diagram ini merupakan diagram yang menggambarkan alir kerja dari program untuk melakukan pemberian notifikasi dan pemberian makanan
Pada Gambar 10, disajikan flowchart dari program IoT yang ditanamkan pada mikrokontroler NodeMCU dan Arduino Uno. Ketika sistem dinyalakan (on), Arduino akan menginisiasi ambang batas berat minimum yang telah ditentukan sebelumnya. Kemudian NodeMCU akan mengecek ketersediaan koneksi internet yang terdaftar pada NodeMCU yang digunakan. Loadcell yang ditempatkan pada bagian atas tempat penyimpanan akan membaca berat makanan yang masih tersedia pada tempat penyimpanan. Data berat tersebut akan dibandingkan dengan berat ambang batas minimum yang telah ditentukan sebelumnya. Data berat yang didapatkan akan ditampilkan pada layar LCD.
Pada tahap berikutnya, NodeMCU akan menerima data waktu penjadwalan pemberian makan otomatis. Kemudian NodeMCU akan membaca data waktu server aplikasi Blynk yang sudah terinstal pada smartphone. Pembacaan data waktu server aplikasi Blynk akan dicocokan dengan data waktu yang dimasukan untuk pemberian makanan. Apabila data waktu masukan dengan data waktu server aplikasi Blynk sama, maka NodeMCU akan memerintahkan motor servo untuk melakukan serangkaian gerakan membuka pintu sehingga makanan yang tersedia pada penyimpanan dapat keluar ke wadah tempat makannya. Apabila waktu yang ditentukan tidak cocok dengan waktu server, maka NodeMCU akan mengecek apakah tombol ”Makan Sekarang” ditekan, apabila tombol makan sekarang ditekan, maka NodeMCU akan memerintahkan motor servo untuk melakukan serangkaian gerakan sehingga makanan yang tersedia pada penyimpanan dapat keluar ke wadah tempat makannya.
Pada tahap selanjutnya, makanan yang terus keluar pada wadah tempat makan akan terus keluar hingga mencapai berat yang ditentukan. Dalam hal ini digunakan hewan kucing dengan bobot <1,5 kg sehingga berdasarkan landasan teori dibutuhkan makanan sekitar 30 gram. Maka ketika berat makanan telah mencapai 30 gram, loadcell akan memberikan sinyal kepada NodeMCU kemudian NodeMCU akan memerintahkan motor servo untuk menutup pintu tempat penyimpanan makanan. Berat makanan yang dikeluarkan pada wadah tempat makan akan ditampilkan pada aplikasi Blynk. M. Blok Diagram Skema Kerja Sistem
Blok diagram skema kerja sistem merupakan sebuah diagram yang menggambarkan proses serta alur kerja dari sistem pemberi makan hewan otomatis.
Gambar 11. Blok Diagram Skema Kerja Sistem
VI. HASILDANPEMBAHASAN
Pada sistem pemberi makan hewan pemberi makan hewan peliharaan otomatis yang akan dibuat, ditentukan spesifikasi sebagai acuan untuk mengevaluasi hasil dan analisis dari keandalan sistem yang dibuat, adapun spesifikasi tersebut adalah:
1. Tersedia dua input waktu pemberian makan otomatis. 2. Tersedia pemberi makan manual secara real time. 3. Porsi makanan yang keluar tetap dengan tingkat
akurasi ±3 gram.
4. Dapat memberikan notifikasi ketika cadangan makanan hampir habis.
5. Dapat memonitor sisa makanan pada tempat makan melalui LCD monitor pada smartphone.
6. Kapasitas penyimpanan cadangan makanan adalah 1 Kg.
7. Sumber daya utama dari panel surya berkapasitas 20 WP.
8. Baterai dapat bertahan sampai dengan 3 hari tanpa pengisian daya (charging).
Sistem pemberi makan hewan peliharaan ini menggunakan dua mikrokontroler untuk memproses data input yang mengatur aktuator sebagai data output. Mikrokontroler NodeMCU ESP 8266 dan Arduino Uno. Jadwal pemberian makanan oleh sistem ini dapat dilakukan menggunakan 2 cara, otomatis dan manual menggunakan media aplikasi Blynk pada smartphone. Untuk cara otomatis, terdapat dua slot jadwal input waktu yang sudah terintegrasi dengan waktu pada server aplikasi Blynk. Sedangkan untuk cara manual, pada aplikasi Blynk terdapat tombol “makan sekarang” yang apabila ditekan, maka sistem lansung mengeluarkan makanan saat itu juga.
Berikut merupakan interface dari aplikasi Blynk yang digunakan.
Untuk Mengatur jadwal pemberian makanan pada aplikasi Blynk, maka langkah yang harus dilakukan adalah sebagai berikut.
Gambar 14. Tampak mukaAplikasi Blynk.
Pada layar utama, dipilih kolom jadwal makan 1 atau jadwal makan 2. Setelah itu tampilan aplikasi akan menjadi seperti gambar 15. Kemudian tekan “OK”
Gambar 15. Tampilan menu mengatur jadwal otomatis Adapun bentuk dari alat pemberi makan hewan yang telah dibuat meliputi sebagai berikut:
Gambar 16. Tampak Samping pemberi Makan Otomatis
Gambar 17. Tampak Depan Pemberi Makan Otomatis
Gambar 18. Tampak Atas Pemberi Makan Otomatis A. Pengujian Sistem
Pada sistem pemberi makan otomatis yang dibuat, dilakukan pengujian tehadap 5 aspek yaitu
1. Pengujian durasi pengisian baterai 2. Pengujian performa baterai 3. Pengujian akurasi sensor berat
4. Keberhasilan sistem melakukan pemberian makanan 5. Pemberian notifikasi ketika sisa makanan menipis. Kelima aspek pengujian dilakukan selama masa pengerjaan tugas akhir dan bertempat di laboratorium Teknik Elektro Universitas Pertamina
1. Pengujian Durasi Pengisian Baterai
Pengujian ini dilakukan untuk mengetahui estimasi waktu yang dibutuhkan oleh panel surya untuk mengisi daya baterai dari kosong hingga penuh. Wiring diagram yang digunakan untuk melakukan pengujian ini disajikan dalam Gambar 19 dan hasil pengujian disajikan pada Tabel 1.
Tabel 1.Pengujian Data Durasi Untuk Pengisian Baterai Dengan Panel Surya Percob aan ke: Intensitas iradiasi rata - rata (W m⁄ 2) Arus keluar panel surya (A) Tegangan Keluar Panel Surya (V) Daya Keluar Panel Surya Durasi Pengisian Baterai (Jam) 1. 556 0,54 14,6 7,88 11 2. 540 0,54 14,7 7,94 11 3. 550 0,56 14,9 8,34 10,5 4. 530 0,54 14,6 7,88 11 5. 546 0,56 14,9 8,34 10,5 6. 559 0,54 14,8 7,99 11 7. 563 0,55 14,7 8,1 11 8. 555 0,55 14,5 7,97 11
Berdasarkan data pada tabel 1 dapat diketahui bahwa rata – rata rentang iradiasi yang diberikan oleh lampu sorot adalah 530-570 W m⁄ 2. Dengan menggunakan besaran iradiasi yang konstan, maka akan menghasilkan output daya yang relatif konstan. Dengan demikian dapat dilakukan estimasi durasi yang dibutuhkan oleh panel surya untuk mengisi baterai dengan menggunakan persamaan 2.5 . Durasi (Jam)= Kapasitas Baterai (Wh)Daya Keluaran (W)
Durasi (Jam) = 84 Wh8 W
Durasi (Jam) = 10,5 Jam
Data yang didapatkan berdasarkan pengujian yang dilakukan mendekati data yang didapatkan berdasarkan perhitungan teoritis yaitu sekitar 10,5 jam. Data yang didapatkan ini berbeda dengan desain awal sistem pengisian daya yang telah dituliskan pada bab 3. Berdasarkan desain awal yang telah dituliskan pada bab 3, dengan menggunakan panel surya berkapasitas 20 WP dapat mengisi daya baterai berkapasitas 84 Wh selama sekitar 4 Jam. Perbedaan ini disebabkan karena pada bab 3 perhitungan dilakukan ketika panel surya terus mendapatkan iradiasi sebesar 1000 W m⁄ 2 yang memungkinkan panel surya selalu mencapai daya maksimum (watt peak) nonstop. Sedangkan pada saat pengujian, panel surya yang digunakan hanya mampu menghasilkan sekitar 8 watt daya yang dikeluarkan sehingga durasi yang dibutuhkan untuk mengisi baterai menjadi lebih lama.
Pada sistem yang dibuat, nilai efisiensi dari panel surya yang digunakan adalah 9,02 %. Efisiensi panel surya yang digunakan masih lebih kecil dibandingkan efisiensi referensi [21]. Salah
satu penyebab efisiensi yang rendah dari panel surya yang digunakan adalah suhu panel surya sangat tinggi dari Standard Test Condition (STC). Berdasarkan [12], peningkatan suhu panel surya dapat menyebabkan losses yang akan mempengaruhi performa panel surya yang digunakan. Suhu yang tinggi pada panel surya ini disebabkan oleh energi iradiasi yang digunakan untuk melepas elektron dari electron shell yang berlebih, sehingga energi tersebut akan berubah menjadi energi panas. Dengan menggunakan Thermogun, diketahui suhu panel surya ketika dilakukan pengujian mencapai 80°C-90°C.
Faktor lain yang dapat mempengaruhi panel surya yang digunakan adalah jenis lampu sorot yang digunakan adalah lampu pijar dengan reflector tunggal, sehingga tidak semua iradiasi yang dipancarkan pada panel surya adalah tegak lurus 90°, pada bagian ujung – ujung panel surya akan sedikit terdapat perbedaan beberapa derajat yang mengakibatkan pada terjadinya cosine loss pada panel surya.
Efisiensi panel surya yang digunakan dapat ditingkatkan dengan melakukan pembersihan debu maupun kotoran yang menempel pada panel surya, mempertahankan suhu tetap rendah ketika sedang beroperasi, memperpendek sambungan kabel yang digunakan, menghindari terjadinya cosine loss, mengindari terjadinya shadding ketika panel surya sedang digunakan.
2. Pengujian Performa Baterai
Pengujian ini dilakukan untuk mengukur kapabilitas dari kapasitas baterai yang digunakan untuk sebagai catu daya utama dari sistem pemberi makan otomatis ini. Pengujian ini dilaksanakan dengan cara menghubungkan langsung beban pada catu daya dengan pemakaian normal setiap harinya. Pada pengujian yang dilakukan, beban yang dihubungkan antara lain NodeMCU, Arduino, Motor servo, LCD, dua Load Cell. Keseluruhan sistem yang telah dintegrasikan ini dihubungkan pada baterai dari kondisi baterai dalam keadaan fully charged hingga fully discharged.
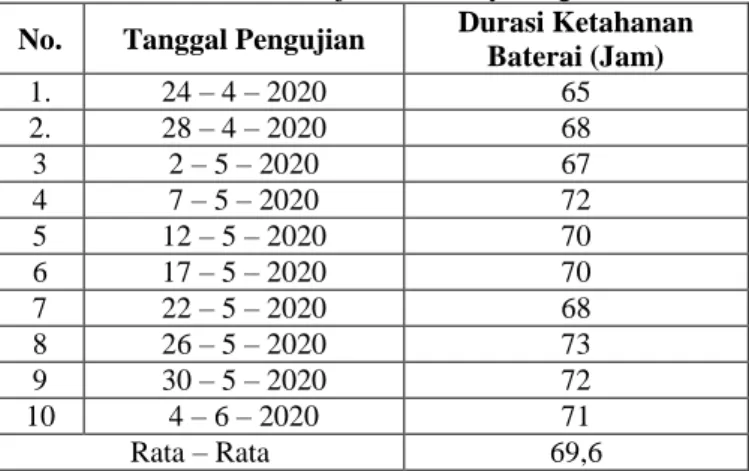
Tabel 2. Durasi Baterai Menjadi Catu Daya Bagi Sistem
No. Tanggal Pengujian Durasi Ketahanan
Baterai (Jam) 1. 24 – 4 – 2020 65 2. 28 – 4 – 2020 68 3 2 – 5 – 2020 67 4 7 – 5 – 2020 72 5 12 – 5 – 2020 70 6 17 – 5 – 2020 70 7 22 – 5 – 2020 68 8 26 – 5 – 2020 73 9 30 – 5 – 2020 72 10 4 – 6 – 2020 71 Rata – Rata 69,6
Pada tabel 2 merupakan hasil pengujian ketahanan baterai yang digunakan sebagai catu daya utama pada rangkaian sistem yang digunakan. Berdasarkan hasil pengujian yang telah dilakukan, diketahui bahwa durasi rata-rata ketahanan baterai adalah 69,6 jam atau sekitar 3 hari. Berdasarkan perhitungan
total beban yang dilakukan pada bab 3, diketahui bahwa total daya yang digunakan sistem selama sehari adalah 20,43 Wh. Apabilia kapasitas baterai yang dapat digunakan adalah 84 Wh maka dengan melakukan modifikasi pada persamaan 2.1 didapatkan durasi penggunaan baterai maksimal adalah:
Kapasitas (Wh)= beban(Wh) × Hari tanpa matahari Efisiensi Muatan Durasi penggunan baterai
=
0,8 ×8420,43 W WhDurasi penggunaan baterai = 3,28 hari atau 78,94 jam
Berdasarkan data yang didapatkan, diketahui bahwa kapasistas baterai yang digunakan mampu untuk menjadi catu daya bagi sistem selama 3 hari tanpa pengisian ulang (charging). Kriteria ini sesuai dengan spesifikasi sistem yang ditetapkan. Berdasarkan perhitungan yang telah dilakukan, perbedaan data teori dengan hasil pengujian disebabkan akibat dari adanya ketidakefisienan komponen elektronika yang digunakan. Ketidakefisienan ini dapat berupa meningkatnya suhu dari setiap komponen yang digunakan sehingga energi listrik berkonversi menjadi energi panas yang berupa rugi –rugi.
3. Pengujian Akurasi Sensor Berat
Pengujian ini dilakukan untuk menentukan kelayakan sensor berat yang digunakan oleh sistem pemberi makan otomatis. Sensor berat yang digunakan berjumlah 2 buah yang diletakan pada bagian atas sistem dan dibagian bawah piring makan. Sensor yang diletakan dibagian atas (Sensor 1) berfungsi untuk mengukur berat sisa yang dari makanan yang tersimpan pada tempat penyimpanan. Sensor yang diletakan pada bagian bawah piring makan (Sensor 2) berfungsi untuk mengukur berat makanan yang dikeluarkan agar sesuai dengan porsi yang telah diatur sebelumnya.
Tabel 3. Perbandingan Berat Konvensional dan sensor
No Berat
(gr)
Konvensional Sensor 1 Sensor
2 1 50 50 51 49 50 52 50 50 50 48 50 52 47 50 51 48 2 75 75 75 74 75 76 74 75 76 75 75 76 73 75 77 74 3 100 100 101 100 100 99 99 100 101 99 100 101 100 100 102 98 4 150 150 151 151 150 151 151 150 151 151 150 151 151 150 152 152 No Berat (gr) Konvensional Sensor 1 Sensor 2 5 200 200 201 198 200 201 199 200 202 198 200 201 199 200 203 200 6 250 250 251 249 250 252 248 250 251 249 250 252 250 250 251 248 Rata – Rata ±1,11 % ±1,2%
Berdasarkan data yang disajikan pada tabel 3 terdapat beberapa perbedaan berat yang terukur oleh timbangan konvensional dan sensor berat yang dibuat. Perbedaaan angka tersebut dapat disebabkan karena pembulatan bilangan pada penentuan faktor kalibrasi setiap sensor berat. Berdasarkan data pada tabel 3, Rata rata eror yang terjadi antara Load Cell 1 dan Load Cell 2 masing - masing dibawah 1%. Angka ini didapatkan dengan menggunakan metode penghitungan error dalam sebuah data seperti yang ditunjukan pada persamaan 2.6 yang kemudian data error tersebut dirata-ratakan sesuai dengan menggunakan persamaan 2.7. Angka error yang didapatkan berdasarkan pengujian yang dilakukan lebih kecil dari spesifikasi yang dirancangkan, sehingga dapat disimpulkan bahwa sistem timbangan yang dibuat sesuai dengan spesifikasi yang tetapkan.
4. Keberhasilan Sistem dalam Melakukan Pemberian Makanan
Proses pengujian ini bertujuan untuk menguji keberhasilan sistem untuk bekerja dengan menggunakan beberapa jenis jaringan yang tersedia, yaitu 2G, 3G dan 4G. Pengujian ini dilakukan dengan cara mengoperasikan sistem dengan koneksi jaringan internet dengan kecepatanyan berbeda – beda. Pada pengujian ini, sistem dikatakan berhasil apabila sistem mampu mengeluarkan makanan sesuai dengan waktu yang telah ditentukan dengan delay kurang dari 5 detik. Hasil dari pengujian yang dilakukan disajikan pada tabel 4 berikut Tabel 4. Keberhasilan Sistem Berdasarkan Koneksi Jaringan
Tanggal Waktu Hasil Jaringan 2G Jaringan 3G Jaringan 4G
18-4-2020 08.00 Berhasil Berhasil Berhasil
17.00 Gagal Berhasil Berhasil
19-4-2020 08.00 Gagal Berhasil Berhasil
17.00 Gagal Berhasil Berhasil
21-4-2020 08.00 Gagal Berhasil Berhasil
17.00 Gagal Berhasil Berhasil
22-4-2020 08.00 Berhasil Berhasil Berhasil
17.00 Gagal Berhasil Berhasil
24-4-2020 08.00 Gagal Berhasil Berhasil
17.00 Gagal Berhasil Berhasil
25-4-2020 08.00 Berhasil Berhasil Berhasil
Pengujian ini dilakukan dengan cara mengubah koneksi jaringan yang terhubung pada sistem dengan variasi 2G, 3G dan 4G. Berdasarkan data yang disediakan pada tabel 4, sistem mampu menjalankan fungsinya dengan baik ketika terhubung dengan koneksi jaringan 3G atau 4G, sedangkan untuk jaringan 2G atau Edge, sistem sering gagal dalam menjankan fungsinya. Maka dapat disimpulkan bahwa sistem mampu bekerja secara otomatis dan sesuai dengan spesifikasi yang ditentukan pada jaringan 3G dan 4G. Tingkat keberhasilan sistem melakukan fungsinya pada jaringan 3G dan 4G adalah 100%.
Dalam melakukan pengujian ini dilakukan juga pengujian terhadap waktu yang diperlukan oleh sistem untuk merespons perintah yang diberikan dari smartphone. Pengujian ini bertujuan untuk mengetahui jenis koneksi jaringan yang terbaik bagi sistem
Data yang disajikan pada tabel 5 merupakan hasil dari pengujian pengaruh koneksi internet terhadap respons sistem. Berdasarkan tabel yang disajikan, dapat diketahui bahwa pada koneksi 3G memiliki rata rata delay selama 2,25 detik sedangkan dengan menggunakan koneksi 4G rata rata delay yang terjadi selama 0,91 detik sehingga kecepatan koneksi dari internet mempengaruhi performa sistem yang dibuat. Berdasarkan pengujian yang dilakukan, dapat diketahui bahwa koneksi internet 4G merupakan koneksi internet terbaik untuk mendukung performa sistem.
Tabel 5. Waktu Delay Sistem Untuk Merespons Terhadap Berbagai Jaringan
Tanggal Waktu Hasil (Detik) Jaringan 2G Jaringan 3G Jaringan 4G 18-4-2020 08.00 4 2 1 17.00 Gagal 3 2 19-4-2020 08.00 Gagal 3 1 17.00 Gagal 2 1 21-4-2020 08.00 Gagal 2 1 17.00 Gagal 3 1 22-4-2020 08.00 5 2 0 17.00 Gagal 2 1 24-4-2020 08.00 Gagal 1 0 17.00 Gagal 2 1 25-4-2020 08.00 4 2 1 17.00 Gagal 3 1 Rata Rata 2,25 0,91 5. Pemberian Notifikasi
Pemberian notifikasi diperlukan untuk memudahkan pengguna dalam mengetahui ketersedian cadangan makanan yang masih tersimpan pada tempat penyimpanan. Pada sistem pemberi makan otomatis yang dirancang ini, berat sisa oleh makanan akan dibaca oleh sensor berat Load Cell yang telah tehubung dengan mikrokontroler Arduino Uno. Ketika berat sisa makanan pada tempat penyimpanan sudah kurang dari batas yang ditentukan, maka mikrokontroler Arduino Uno akan mengirimkan sinyal kepada mikrokontroler NodeMCU yang kemudian akan mengirimkan notifikasi pada smartphone pengguna.
Tabel 6. Pemberian Notifikasi Ketika Sisa Makanan Menipis
No Keberhasilan Mengirimkan Notifikasi Sisa Makanan tempat penyimpanan awal (gram) Sisa Makanan Pada tempat Penyimpanan akhir (gram) Waktu Respon Sistem (Detik) 1 Berhasil 137 106 3 2 Berhasil 125 97 2 3 Berhasil 130 100 3 4 Berhasil 133 101 4 5 Berhasil 142 110 1 6 Berhasil 136 106 4 7 Berhasil 146 115 6 8 Berhasil 131 99 2 9 Berhasil 142 111 3 10 Berhasil 124 92 1 11 Berhasil 122 92 1 12 Berhasil 138 107 3 13 Berhasil 126 98 2 14 Berhasil 129 107 3 15 Berhasil 132 111 1
Rata – rata respon sistem 2,6
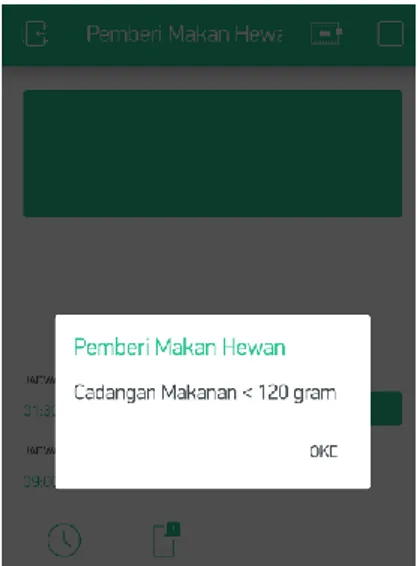
Berdasarkan tabel 6, keberhasilan sistem memberikan notifikasi pada smartphone pengguna ada 100%, hasil ini sesuai dengan spesifikasi dari sistem yang telah ditentukan sebelumnya. Pengujian ini dilakukan dengan cara menempatkan makanan hewan pada tempat penyimpanan dengan bobot 121- 150 gram. Kemudian dengan menekan tombol “Makan Sekarang” pada smartphone maka sistem akan mengeluarkan makanan sebanyak 30gram. Ketika berat sisa pada makanan tangki sudah kurang dari kurang dari 120gram, maka pesan notifikasi dikirimkan pada smartphone pengguna. Sistem akan terus mengeluarkan makan hingga berat makanan yang terkeluarkan dari tempat penyimpanan sudah mencapai 30 gram. Notifikasi yang yang diterima oleh smartphone merupakan pesan pop-up yang akan terus diterima setiap 20 menit hingga tempat penyimpanan makanan diisi kembali. Berdasarkan pengujian yang dilakukan, waktu yang diperlukan oleh sistem bervariasi dari 1-8 detik dengan rata – rata respon sistem adalah 2,6 detik. Variasi durasi sitem merespon ini dipengaruhi dari mode deep sleep yang diprogram pada Arduino yang digunakan. Pada Arduino, diprogram agar mode deep sleep dapat berlangsung dengan konfigurasi 8 detik deep sleep dan 2 detik aktif normal. Akibat dari penggunaan mode deep sleep ini adalah Arduino hanya mampu membaca data berat dari loadcell ketika sedang dalam kondisi aktif normal, maka ketika berat makanan <120 gram terjadi saat Arduino dalam kondisi deep sleep akan terjadi delay hingga Arduino dalam kondisi aktif normal. Saat Arduino dalam kondisi aktif normal, Arduino akan mengirimkan sinyal HIGH pada NodeMCU kemudian NodeMCU akan mengirimkan notifikasi pada smartphone pengguna.
Gambar 20. Interface Aplikasi Memberikan Notifikasi
Tujuan penggunaaan mode deep sleep pada Arduino adalah untuk menghemat daya yang digunakan oleh mikrokontroler tersebut. Berdasarkan perhitungan yang telah dilakukan, dengan menggunakan mode deep sleep terjadi penghematan daya sebesar 40% daripada tanpa menggunakan mode deep sleep.
VII. KESIMPULAN.
Berdasarkan uraian yang telah dijabarkan, dapat disimpulkan bahwa:
1. Sistem pemberi makan otomatis berhasil melakukan pemberian makanan secara otomatis dan manual dengan rata – rata waktu sistem merespon kurang dari 3 detik.
2. Sistem berhasil memberikan notifikasi kepada pengguna ketika cadangan makanan <120 gram dengan rata – rata waktu sistem merespon kurang dari 3 detik
3. Sistem pemberi makan hewan otomatis dapat berfungsi dengan baik ketika berada pada ruangan yang terkoneksi jaringan internet dengan kekuatan sinyal minimal 3G yang telah didaftarkan sebelumnya 4. Kapasitas baterai 12 V 7 Ah yang digunakan pada sistem dapat menyuplai daya sistem hingga 2 hari tanpa dilakukan pengisian ulang
5. Dengan menggunakan panel surya dengan kapasitas 20 WP, durasi rata – rata pengisian ulang baterai menggunakan lampu sorot dengan iradiasi 530 – 570 W m⁄ 2 adalah 10,875 Jam
VIII. SARAN
Berdasarkan uraian yang telah disampaikan adapun saran yang dapat menjadi pertimbangan untuk penelitian lebih lanjut adalah
1. Menggunakan kapasitas tangki penyimpanan makanan yang lebih besar dan argonomis agar makanan yang tersimpan dapat lebih banyak.
2. Pada aplikasi, ditambahkan kolom input berat makanan yang ingin dikeluarkan.
3. Menambahkan sistem pemberian minum otomatis 4. Menambahkan fitur tambahan seperti kamera
pemantau, speaker suara dll.
IX. REFERENSI
[1] A. Itvatia, "Pet and Flower House Di Bandung Utara," Universitas Diponogoro , Semarang, 2006.
[2] M. B. Audrina, "Rancang Bangun Alat Pemberi Makan
Hewan Otomatis Pada Kucing Menggunakan
Mikrokontroler," Institut Bisnis dan Infomatika Stikom, Surabaya, 2019.
[3] Banfield Pet Hospital, "Obesity is an Epidemic," Banfield Pet
Hospital, [Online]. Available:
https://www.banfield.com/state-of-pet-health/obesity. [Accessed 26 februari 2020].
[4] N. Triakoso and F. Isnaini, "Hubungan antara Bangsa Anjing dengan Obesitas Pada Anjing di Surabaya," Vetmedika, vol. I, pp. 1-4, 2012.
[5] C.-M. Own, H.-Y. Shin and T. Chen-Ya, "The Study and Application of the IoT in Pet System," Scientific Research,
vol. I, no. 3, pp. 1-8, 2013.
[6] E. Susanto, D. N. Dharma and M. Iqbal, "Rancang Bangun Alat Pemberi Makan Anjing/Kucing Otomatis dengan Kontrol SMS," in Seminar Nasional Aplikasi Teknologi Informasi (SNATI), Yogyakarta, 2013.
[7] D. Koswara, "Perancangan Sistem Pemberi Pakan Hewan Otomatis Menggunakan Arduino Uno Berbasis Android Pada Petshop Vet De Villa," Widuri, Tanggerang, 2015.
[8] A. Ardiansyah, M. a. Wibowo and E. Ihsanto, "Design of Pet Feeder using Web Server as Internet of Things Application," in 2nd International Conference on Electrical Engineering and Informatics, Riau, 2016.
[9] Tokopedia, "5.5L Automatic & Programmable Pet Food Feeder," innovtronic, 3 Oktober 2019. [Online]. Available: https://www.tokopedia.com/innovtronic/5-5l-automatic-programmable-pet-food-feeder-dispenser-black. [Accessed 8 agustus 2020].
[10] Tokopedia, "PETECC PF-02 - Automatic Smart Pet Feeder,"
https://www.tokopedia.com/laniashop/petecc-pf-02-automatic-smart-pet-feeder-and-camera-6l-capacity. [Accessed 8 Agustus 2020].
[11] Shopee, "Alat Pemberi Makan Hewan Otomatis Ukuran 4.25 L," totopop.id, [Online]. Available: https://shopee.co.id/Alat- Pemberi-Makan-Otomatis-Ukuran-4.25l-Untuk-Anjing-Kucing-i.98797889.4832767962. [Accessed 8 Agustus 2020].
[12] A. F. Zobaa and R. C. Bansal, Handbook of Renewable Energy Technology, Singapore: Word Scientific Publishing , 2011.
[13] Anonimous, "Kinerja Panel Surya, Efisiensi Versus Daya Maksimum," Surya Utama Putra, 30 Mei 2016. [Online]. Available:
https://suryautamaputra.co.id/blog/2016/05/30/kinerja-panel-surya-efisiensi-versus-daya-maksimum/. [Accessed 1 4 2020].
[14] Selatan Maju Sejahtera, "Zeus Baterai," Zeus Baterai Online, [Online]. Available: https://zeusbatteryonline.com/wp- content/uploads/2020/02/Kepanjangan-VRLA-dan-Artinya.png. [Accessed 9 Maret 2020].
[15] JakartaNotebook.com, "Taffware Solar Charger Controller Dual USB 10A 12V 24V - RBL-006A - Black," [Online]. Available: https://www.jakartanotebook.com/pwm-solar-charger-controller-dual-usb-10a-12v-24v-pwm10a-black#. [Accessed 2020 Februari 2020].
[16] HT Sensor Technology, "HT Sensor Technology," [Online]. Available:
https://www.google.com/search?q=Load+Cell+TAL220B& safe=strict&sxsrf=ALeKk03IslgZpNs_Pb4UhnCSSelPChjj0
g:1584040303545&source=lnms&tbm=isch&sa=X&ved=2a hUKEwj75uj80ZXoAhWLbSsKHXSeDmQQ_AUoAXoEC AsQAw#imgrc=UZp2hJuX5dhYUM. [Accessed 2020 Maret 9].
[17] Circuit4syou.com, "HX771 Load Cell Amplifier Interface with Arduino," 2015 November 25. [Online]. Available: https://circuits4you.com/2016/11/25/hx711-arduino-load-cell/. [Accessed 2020 Maret 9].
[18] B. R. Babu, P. P. Kumar and D. P. Kuppusamy, "Arduino Mega Based PET Feeding Automation," Journal of Electronics and Communication Engineering, vol. XIV, no. 4, pp. 13-16, 2019.
[19] U. Khahir and T. Sabrina, "Alat Pemberi Makan Kucing Otomatis Berbasis Arduino Pada Pet Shop," SEBATIK , vol. xx, pp. 9-14, 2017.
[20] F. Guiller, 20 Juni 2015. [Online]. Available:
http://www.guillier.org/blog/tag/wifi2.html. [Accessed 2020 Maret 9].
[21] d. Sariman, "ANALISA EFISIENSI PENGARUH
PARAMETER CAHAYA MATAHARI PADA
FOTOVOLTAIK 100WP JENIS POLIKRISTAL,
MONOKRISTAL DAN AMORPHOUS DI
LABORATORIUM RISET TEKNOLOGI ENERGI UNSRI INDRALAYA," in Seminar Nasional AVoER XI 2019, Palembang, 2019.
![Gambar 1 Programmable LCD Automatic Dog & Cat Feeder [9]](https://thumb-ap.123doks.com/thumbv2/123dok/3104495.2330084/3.892.527.758.127.334/gambar-programmable-lcd-automatic-amp-cat-feeder.webp)
![Gambar 6. Baterai VRLA deep cycle [14]](https://thumb-ap.123doks.com/thumbv2/123dok/3104495.2330084/4.892.131.381.888.1040/gambar-baterai-vrla-deep-cycle.webp)
![Gambar 9. NodeMCU [19]](https://thumb-ap.123doks.com/thumbv2/123dok/3104495.2330084/6.892.458.857.79.1030/gambar-nodemcu.webp)