Jurnal KomTekInfo Fakultas Ilmu Komputer, Volume 1, No. 1, Juni 2014 ISSN : 2356-0010
REMOTE CONTROL LAMPU KAMAR DENGAN FITUR
PWM DAN SEVEN SEGMENT BERBASIS
MIKROKONTROLER ATmega 8535
Ruri Hartika Zain, S.Kom, M.Kom, Fakultas Ilmu Komputer,
Universitas Putra Indonesia”YPTK” Padang
e-mail : [email protected]
Abstrak - Alat ini akan membantu pengguna untuk mengontrol lampu kamar dari jarak jauh, dimana
pengguna tidak perlu lagi berjalan untuk mengontrol lampu kamar tersebut karna dengan alat ini penguna bisa mengontrol lampu kamar dengan pengendali remote control, Penggunaan mikrokontroler ATMega 8535 sebagai pemroses yang memiliki fitur PWM sebagai pemicu berfungsinya TRIAC untuk mengontrol tegangan AC yang akan dialirkan ke lampu kamar sebagagi control hidup mati Dan pemanfaatan ic TX2B/RX2B sebagai transmitter/receiver pada remote control.
Kata Kunci : lampu, mikrokontroler, remote I. PENDAHULUAN
1.1 Latar Belakang Masalah
Kebutuhan akan efektifitas dan efisiensi sangat diutamakan dalam berbagi bidang. Hal tersebut telah mendorong manusia untuk berkreasi dan berinovasi dalam bidang teknologi untuk menciptakan suatu alat yang lebih efektif dan efisien. Perkembangan teknologi saat ini dapat dilihat sudah banyak alat yang diciptakan supaya memberikan kemudahan pada masyarakat dalam melaksanakan pekerjaan. Maka dengan ini timbullah suatu ide untuk menciptakan suatu alat yang dapat mempermudah manusia dalam melakukan pekerjaan yang biasa dilakukan sehari – hari. Alat ini akan membantu pengguna untuk mengontrol lampu kamar dari jarak jauh, dimana pengguna tidak perlu lagi berjalan untuk mengontrol lampu kamar tersebut karna dengan alat ini penguna bisa mengontrol lampu kamar dengan pengendali remote control. Penggunaan mikrokontroler ATMega 8535 sebagai pemroses yang memiliki fitur PWM sebagai pemicu berfungsinya TRIAC untuk mengontrol tegangan AC yang akan dialirkan ke lampu kamar sebagagi control hidup mati Dan pemanfaatan ic TX2B/RX2B sebagai transmitter/receiver pada remote control. II. LANDASAN TEORI
1. Mikrokontroler ATMega8535
ATMega8535 merupakan salah satu mikrokontroler 8 bit buatan Atmel untuk keluarga AVR yang diproduksi secara masal pada tahun 2006. Karena merupakan keluarga AVR, maka ATMega8535 juga menggunakan arsitektur RISC. Berbeda dengan mikrokontroler keluarga MCS-51 yang berteknologi CISC (Complex Instruction Set
Computing). Pada mikrokontroler dengan
teknologi RISC semua instruksi dikemas dalam kode 16 bit (16 bits words) dan sebagian besar instruksi dieksekusi dalam 1 clock, sedangkan pada teknologi CISC seperti yang diterapkan pada mikrokontroler MCS-51, untuk menjalankan sebuah instruksi dibutuhkan waktu sebanyak 12 siklus clock.
Mikrokontroler AVR ATmega8535 memiliki fitur yang cukup lengkap. Mikrokontroler AVR ATmega8535 telah dilengkapi dengan ADC internal, EEPROM
internal, Timer/Counter, PWM, analog
comparator, dll (M.Ary Heryanto, 2008).
Sehingga dengan fasilitas yang lengkap ini memungkinkan kita belajar mikrokontroler keluarga AVR dengan lebih mudah dan efisien, serta dapat mengembangkan kreativitas penggunaan mikrokontroler ATmega8535.
Fitur-fitur yang dimiliki oleh mikrokontroler ATmega8535 adalah sebagai berikut:
1. Saluran I/O sebanyak 32 buah, yaitu port A, port B, port C, dan port D. 2. ADC internal sebanyak 8 saluran. 3. Tiga buah Timer/Counter dengan kemampuan pembandingan.
4. CPU yang terdiri atas 32 buah register.
5. SRAM sebesar 512 byte.
6. Memori Flash sebesar 8 kb dengan kemampuan Read While Write. 7. Port antarmuka SPI
8. EEPROM sebesar 512 byte yang dapat diprogram saat operasi.
9. Antarmuka komparator analog. 10. Port USART untuk komunikasi serial.
11. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz.
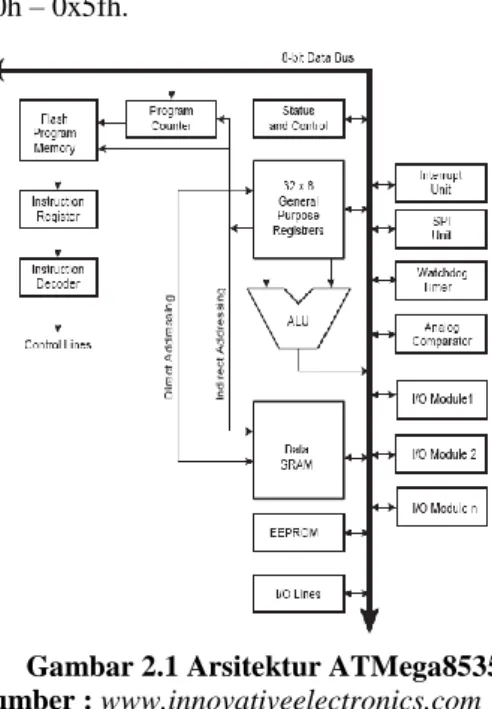
2. Arsitektur ATMega8535
Mikrokontroler ATmega16 memiliki arsitektur Harvard, yaitu memisahkan memori untuk kode program dan memori untuk data sehingga dapat memaksimalkan untuk kerja dan paralelisme. Instruksi-instruksi dalam memori program dieksekusi dalam satu alur tunggal, dimana pada saat satu instruksi dikerjakan instruksi berikutnya sudah diambil (pre-fetched) dari memori program. Konsep inilah yang memungkinkan instruksi-instruksi dapat dieksekusi dalam setiap satu siklus clock.
32 x 8-bit register serba guna digunakan untuk mendukung operasi pada Arithmetic Logical Unit (ALU) yang dapat dilakukan dalam satu siklus. 6 dari register serbaguna ini dapat digunakan sebagai 3 buah register pointer 16 bit pada mode pengalamatan tak langsung untuk mengambil data pada ruang memori data. Ketiga register pointer 16 bit ini disebut dengan register X (gabungan R26 dan R27), register Y (gabungan R28 dan R29), dan register Z (gabungan R30 dan R31).
Hampir semua instruksi AVR memiliki format 16-bit (word). Setiap alamat memori program terdiri dari instruksi 16-bit atau 32-bit. Selain register serbaguna di atas, terdapat register lain yang terpetakan dengan teknik memory mapped I/O selebar 64 Byte. Beberapa register ini digunakan untuk fungsi khusus antara lain sebagai register kontrol Timer/Counter, interupsi, ADC, USART, SPI, EEPROM dan fungsi I/O lainnya. Register – register ini menempati memori pada alamat 0x20h – 0x5fh.
Gambar 2.1 Arsitektur ATMega8535 Sumber : www.innovativeelectronics.com
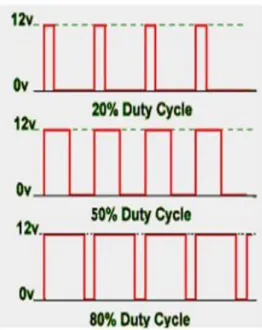
3. Pulse Width Modulation
PWM merupakan suatu teknik teknik dalam mengatur kerja suatu peralatan yang memerlukan arus pull in yang besar dan untuk menghindari disipasi daya yang berlebihan dari peralatan yang akan dikontrol. PWM merupakan suatu metoda untuk mengatur kecepatan perputaran motor dengan cara mengatur prosentase lebar pulsa high terhadap perioda dari suatu sinyal persegi dalam bentuk tegangan periodik yang diberikan ke motor sebagai sumber daya. Semakin besar perbandingan lama sinyal high dengan perioda sinyal maka semakin cepat motor berputar.
Sinyal PWM dapat dibangun dengan banyak cara, dapat menggunakan metode analog menggunakan rankaian op-amp atau dengan menggunakan metode digital. Dengan metode analog setiap perubahan PWM-nya sangat halus, sedangkan menggunakan metode digital setiap perubahan PWM dipengaruhi oleh resolusi dari PWM itu sendiri. Misalkan PWM digital 8 bit berarti PWM tersebut memiliki resolusi 2 pangkat 8 = 256, maksudnya nilai keluaran PWM ini memiliki 256 variasi, variasinya mulai dari 0 – 255 yang mewakili duty cycle 0 – 100% dari keluaran PWM tersebut. Pada perancangan driver ini, sinyal PWM akan diatur secara digital yang dibangkitkan oleh mikrokontroler ATMEGA 8535.
1. Pengaturan PWM menggunakan
mikrokontroler ATMEGA Proses pembangkitan sinyal PWM pada mikrokontroler AVR ATMEGA 8535 adalah sebagai berikut.
Gambar 2.3 Proses pembangkitan sinyal PWM pada mikrokontroler ATMEGA 8535
Resolusi adalah jumlah variasi perubahan nilai dalam PWM tersebut. Misalkan suatu PWM memiliki resolusi 8 bit berarti PWM ini memiliki variasi perubahan nilai sebanyak 2 pangkat 8 = 256 variasi mulai dari 0 – 255 perubahan nilai. Compare adalah nilai pembanding. Nilai ini merupakan nilai referensi duty cycle dari PWM tersebut. Nilai compare bervariasi sesuai dengan resolusi dari PWM. Dalam gambar nilai compare ditandai dengan garis warna merah, dimana posisinya diantara dasar segitiga dan ujung segitiga. Clear digunakan untuk penentuan jenis komparator apakah komparator inverting atau
non-inverting. Mikrokontroler akan
membandingkan posisi keduanya, misalkan bila PWM diset pada kondisi clear down, berarti apabila garis segitiga berada dibawah garis merah (compare) maka PWM akan mengeluarkan logika 0. Begitu pula sebaliknya apabila garis segitiga berada diatas garis merah (compare) maka PWM akan mengeluarkan logika 1. Lebar sempitnya logika 1 ditentukan oleh posisi compare, lebar sempitnya logika 1 itulah yang menjadi nilai keluaran PWM,dan kejadian ini terjadi secara harmonik terus-menerus. Maka dari itu nilai compare inilah yang dijadikan nilai duty cycle PWM. Clear Up adalah kebalikan (invers) dari Clear Down pada keluaran logikanya.
Gambar 2.8
Prescale digunakan untuk menentukan waktu
perioda dari pada PWM. Nilai prescale bervariasi yaitu 1, 8, 32, 64, 128, 256, 1024. Misalkan jika prescale diset 64 berarti timer/PWM akan menghitung 1 kali bila clock di CPU sudah 64 kali, Clock CPU adalah clok mikrokontroler itu sendiri. Perioda dari PWM dapat dihitung menggunakan rumus
Setting prescale disini digunakan untuk mendapatkan frekuensi dan periode kerja PWM sesuai dengan spesifikasi yang dibutuhkan.
2. Perhitungan duty cycle PWM
Dengan cara mengatur lebar pulsa “on” dan “off” dalam satu perioda gelombang melalui pemberian besar sinyal referensi output dari suatu PWM akan didapat duty cycle yang diinginkan.Duty cycle dari PWM dapat dinyatakan sebagai
Duty cycle 100% berarti sinyal tegangan
pengatur motor dilewatkan seluruhnya. Jika tegangan catu 100V, maka motor akan mendapat tegangan 100V. pada duty cycle 50%, tegangan pada motor hanya akan diberikan 50% dari total tegangan yang ada, begitu seterusnya.
Gambar 2.4 Duty cycle
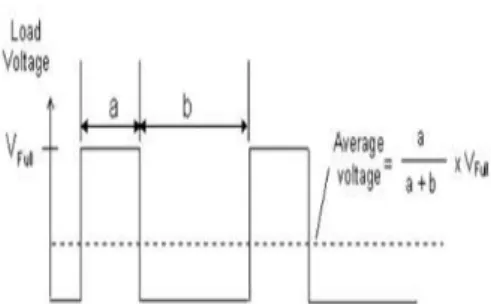
Perhitungan Pengontrolan tegangan output motor dengan metode PWM cukup sederhana.
Gambar 2.5 Average Voltage
Dengan menghitung duty cycle yang diberikan, akan didapat tegangan output yang dihasilkan.Sesuai dengan rumus yang telah dijelaskan pada gambar.
Average voltage merupakan tegangan output
pada motor yang dikontrol oleh sinyal PWM. a adalah nilai duty cycle saat kondisi sinyal “on”. b adalah nilai duty cycle saat kondisi sinyal “off”. V full adalah tegangan maximum pada motor. Dengan menggunakan rumus diatas, maka akan didapatkan tegangan output sesuai dengan sinyal kontrol PWM yang dibangkitkan.
4. Remote Kontrol
Remote kontrol merupakan peralatan
kontrol yang memberikan sinyal input kepada suatu sistem untuk diproses atau dieksekusi. Sinyal yang dikeluarkan oleh Remote Kontrol dipancarkan melalui media pengatar yang dapat berupa Kabel, Gelombang, Infrared. Pada sistem ini media pengantarannya menggunakan gelombang atau sinyal radio yang dipancarkan oleh sebuah pemancar atau
transmiter dan diterima oleh sebuah penerima
atau receiver, untuk lebih jelasnya dapat dilihat pada gambar berikut :
Remote Control yang digunakan
disini merupakan komponen yang telah jadi berikut rangkaian penerimanya. Sistem ini
menjelaskan bahwa, sinyal radio tidak terus menerus dipancarkan tapi hanya dibangkitkan saat pengontrol mengirimkan perintah atau menekan tombol yang ada pada pemancar, yang merupakan frekuensi radio yang terputus-putus, sehingga merupakan pengiriman pulsa-pulsa gelombang radio.
Jumlah pulsa yang dikirimkan mewakili perintah yang dikirim, perintah Play diwakili dengan 8 pulsa, Stop diwakili dengan 16 pulsa, Next 32 pulsa dan Priveous 64 pulsa. Pulsa yang dikirimkan ini akan ditangkap oleh sebuah rangkaian penerima yang dipasangkan pada interface port parallel, berfungsi menerima sinyal dari pemancar yang akan diteruskan ke modul program.
III. ANALISA DAN HASIL 1. Desain Sistem Secara Umum
Secara umum bentuk dari sistem remote control lampu kamar dengan fitur pwm dan seven segment ini terdiri atas rangkaian elektronik. Rangkaian elektronik ini berfungsi untuk memberikan data berupa sinyal digital yang akan diproses oleh mikrokontroler sesuai logika program yang dirancang. Sistem yang dibangun dapat digambarkan secara umum pada context diagram dibawah ini :
2. Context Diagram
Sub bab ini merupakan penjabaran setiap externat entity secara keseluruhan yang digambarkan melalui context diagram. Context diagram merupakan pendefinisian
terhadap sistem yang akan dirancang yang bersifat menyeluruh. Context diagram ini digunakan untuk memudahkan dalam proses penganalisaan sistem yang dirancang secara keseluruhan.
Context diagram berfungsi sebagai
media, yang terdiri dari suatu proses dan beberapa buah external entity. Context
diagram yang dimaksud dapat dilihat pada
REMOTE CONTROL LAMPU KAMAR ATmega 8535 MODUL PROGRAM Data Instruksi Data Instruksi Remote Control Seven Segment Lampu Sinyal Digital Sinyal Digital Sinyal Digital 0
Gambar 3.1 Context Diagram
Sistem ini berinteraksi dengan beberapa entity yaitu remote control, mikrokontroler ATmega 8535, Modul Program, Seven Segment dan Lampu. Selanjutnya entity-entity tersebut akan dibahas dibawah ini sebagai berikut :
a. Remote Control
Remote Control berfungsi sebagai input yang dapat mendeteksi penekanan tombol pada remote control oleh pengguna untuk selanjutnya diproses oleh sistem.
b. Mikrokontroler ATmega 8535 Mikrokontroler ATmega 8535 merupakan basis dari pengendali dari sistem remote control lampu kamar. Pada mikrokontroler akan diisi modul program untuk melakukan pembacaan terhadap remote control yang memberi input dan memberikan instruksi-instruksi untuk mengaktifkan pin-pin output. Modul program mengontrol semua proses yang terjadi pada sistem.
c. Modul Program
Sarana pengolahan data dari input remote control untuk menjalankan sistem remote control lampu kamar. Dalam hal ini program yang mengendalikan alat adalah bahasa pemograman C menggunakan
software Code Vision AVR. Jadi seluruh
proses input/output dikendalikan oleh program
d. Seven Segment
Seven Segment berfungsi sebagai output berupa tampilan led dalam bentuk tersusun yang dapat menampilkan karakter angka.
e. Lampu
Lampu merupakan output pengontrolan dimana lampu akan hidup jika remote control ditekan.
3. Data Flow Diagram
Data Flow diagram merupakan
gambaran sistem secara logika, gambaran ini tergantung pada perangkat keras, perangkat lunak, struktur data atau data organisasi file. Aliran data yang terjadi pada sistem ini dapat kita lihat pada gambar 3.2.
MIKROKONTROLER ATmega 8535 REMOTE CONTROL MODUL PROGRAM Baca Sensor Remote Control 4bit data
Terima Data Kirim Instruksi Data Instruksi LAMPU SEVEN SEGMEN Aktifkan Lampu Tampilkan 7-Segmen 1bit data 7bit data 1.0 2.0 3.0 4.0 5.0 Gambar 3.2 DFD Level 0
Dari DFD diatas dapat dilihat bahwa pada sistem remote kontrol lampu kamar terdapat input dari remote control yang memberikan sinyal 4 bit data ke mikrokontroler ATmega 8535(1.0). Data tersebut akan diterima dan diproses melalui modul program(2.0). Modul Program akan memproses data tersebut sehingga dihasilkan instruksi yang akan dikirimkan ke Mikrokontroler ATmega 8535(3.0). Intruksi tersebut akan digunakan oleh mikrokontroler untuk mengatur keluaran yang akan mengaktifkan lampu(4.0) maupun menampilkan seven segmen(5.0).
4. Blok Diagram
Pada gambar dibawah ini dapat dilihat bentuk blok diagram dari sistem remote control lampu kamar dari entity yang digunakan dalam penunjang kinerja sistem.
MIKROKONTROLER ATmega 8535 REMOTE CONTROL LAMPU 7 - SEGMEN 4bit data 1bit data 7bit data
Gambar 3.3 Blok Diagram
Didalam blok diagram dapat dilihat bagaimana hubungan / proses yang dilakukan oleh sistem remote control lampu kamar.
- Remote Control berfungsi sebagai input untuk mengaktifkan lampu.
- Mikrokontroler berfungsi sebagai media pemrosesan input yang diterima dari Remote
Control dan serta menghasilkan
output untuk mengaktifkan lampu dan seven segmen. - Lampu merupakan entity output
yang yang dikontrol melalui remote control
- 7 Segmen merupakan output yang berfungsi menampilkan karakter angka pada display. 5. Rancangan Fisik Alat
Secara umum, rancangan fisik alat ini dapat dikelompokkan beberapa bagian, yaitu : a. Rangkaian sistem minimum
mikrokontroler ATMEGA8535
b. Remote Control
c. Lampu
d. 7 segment
Gambar 3.4 Fisik Alat 6. Cara Kerja Alat
Secara umum bentuk dari alat ini hanya terdapat sistem mekanik dan rangkaian elektronika. Sistem akan aktif ketika rangkaian dihubungkan dengan power supply. Dimulai dengan menekan tombol A pada remot kontrol sebagai aktifasi untuk menghidupkan lampu pada remote control dan 7 segment akan menunjukan tampilan angka 1 sebagai penanda lampu aktif, dan jika ditekan sekali lagi tombol A pada remote control maka lampu akan mati dan 7 segment akan menunjukan angka 0, Selanjutnya sistem aktifasi lampu kamar diatur dengan penekanan tombol B untuk menambah itensitas cahaya lampu dan tombol C untuk mengurangi itensitas lampu pada ruangan.
7. Desain Secara Terinci
Desain dari alat yang dibuat merupakan gambaran dari alat secara keseluruhan. Dengan adanya desain ini maka prinsip kerja dari alat serta komponen-komponen dari sistem yang digunakan akan dapat dilihat dengan jelas.
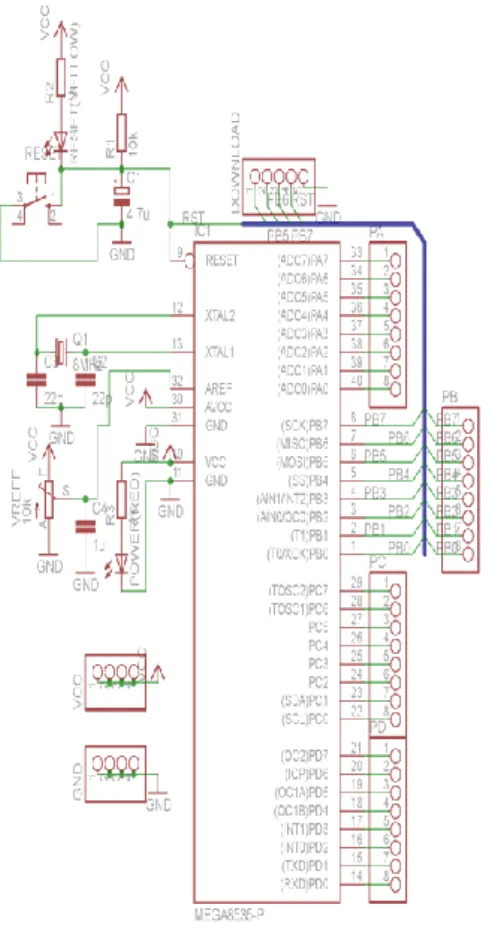
a. Rangkaian Sistem Minimum
Rangkaian sistem minimum ini berfungsi untuk menjalankan mikrokontroller agar dapat bekerja/berfungsi sesuai dengan yang kita butuhkan dimana perancangannya bertujuan untuk mempermudah penggunaan mikrokontroler tersebut. Rangkaian kristal data pin XTAL 1 dan XTAL 2 berfungsi untuk memberikan clock pada sistem, dimana penulis menggunakan kristal 16 Mhz yang juga dapat digunakan untuk komunikasi serial. Pada pin 20 (reset) dibutuhkan rangkaian yang berfungsi sebagai resetter mikrokontroler pada saat awal sistem dihidupkan. Keseluruhan port pada mikrokontroler ini berlogika 1, untuk itu dibutuhkan initialisasi port pada awal pemograman sesuai dengan yang inginkan.
Gambar 3.5 Rangkaian Sistem Minimum Mikrokontroler ATmega 8535
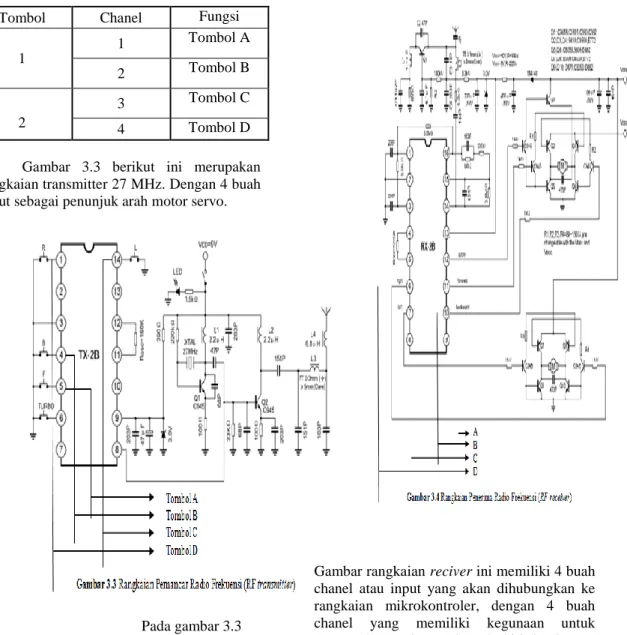
b. Rangkaian Transmitter
Transmitter yang digunakan yaitu
remot kontrol dengan frekuensi 27 MHz, berupa remot kontrol. Modul transmitter ini menggunakan IC TX 2 dengan 4 buah output yang berguna untuk mengarahkan posisi motor servo. Remot kontrol mempunyai 2 buah tombol, masing – masing tombol mempunyai 2 buah chanel. Tabel 3.1 menjelaskan fungsi dari masing – masing chanel.
Tombol Chanel Fungsi 1 1 Tombol A 2 Tombol B 2 3 Tombol C 4 Tombol D
Gambar 3.3 berikut ini merupakan rangkaian transmitter 27 MHz. Dengan 4 buah input sebagai penunjuk arah motor servo.
Pada gambar 3.3 merupakan rangkaian transmitter berupa remot kontrol dengan 4 buah chanel, masing – masing chanel menunjukkan arah. Sinyal yang dipancarkan oleh masing – masing chanel tadi akan ditangkap oleh receiver.
c. Rangkaian Receiver
Receiver sebagai penerima sinyal
diletakkan di port A. Yang mana input – input dari receiver digunakan untuk menggerakkan motor servo ke kiri, kanan, atas dan bawah. Gambar 3.4 merupakan rangkaian dari receiver 27 MHz.
Gambar rangkaian reciver ini memiliki 4 buah chanel atau input yang akan dihubungkan ke rangkaian mikrokontroler, dengan 4 buah chanel yang memiliki kegunaan untuk menentukan arah atas, bawah, kiri dan kanan. Pada gambar 3.5 menjelaskan port yang digunakan untuk rangkaian receiver.
d. Rangkaian Driver Lampu
Bentuk dasar driver lampu yang paling sederhana terdiri dari sebuah saklar elektronis yang akan aktif ketika mendapat masukan dari Mikrokontroler. Untuk lebih jelasnya dapat dilihat pada rancangan blok pada gambar 3.10 di bawah ini :
Blok rangkaian driver ini berfungsi sebagai penggerak triac yang dapat mengaktifkan lampu. Driver ini menggunakan photo triac MOC3021 sebagai saklar elektronis pada triac untuk menghidupkan lampu.. Untuk menghidupkan driver ini perlu dikirimkan sinyal logika tinggi (high) yang akan mengaliri ke pin 1 pada MOC 3021 sehingga mengaktifkan bagian pemancar untuk mengaktifkan photo triac yang terdapat didalam MOC3012, dengan aktifnya photo triac tersebut akan mengirimkan sinyal yang masuk kekaki gate BTA136, yang berfungsi sebagai aktifasi switch pada triac, sehingga lampu dapat menyala..
e. Rangkaian Driver Seven Segmen
Blok rangkaian driver ini berfungsi sebagai penggerak tampilan seven segment. Pada rangkaian ini terdiri dari beberapa komponen utama yaitu: resistor 330 ohm sebanyak 8 buah, dan seven segment. Rangkaiannya dapat dilihat pada gambar 3.6
Gambar 3.6 Rangkaian Driver Seven Segment
Seven segment yang digunakan
merupakan jenis common anoda yang berarti akan aktif ketika pin-pin a, b, c, d, e, f, dan g dihubungkan dengan ground. Resistor 330 ohm digunakan sebagai pembatas tegangan agar LED pada seven segment tidak rusak karena tegangan yang berlebihan.
Untuk mengaktifkan seven segment,
pin output mikrokontroler dihubungkan
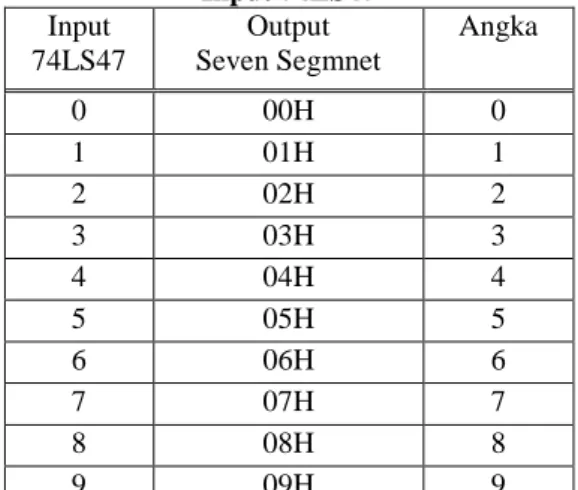
dengan pin-pin pada IC 74LS47. Pada alat yang dibuat, port mikrokontroler yang digunakan adalah Pada Mikrokontroler porta.0 hingga port a.7, portc.0 hingga portc.7. Agar LED pada seven segment menyala, perlu diberi logika aktif Low (0) pada pin IC 74LS47 yang bersangkutan. Karena yang ditampilkan pada seven segment adalah angka satu, dua dan tiga hingga 0, maka pemberian logika pada pin IC 74LS47 menuju ke Seven Segment dapat dilihat pada tabel 3.2.
Tabel 3.2. Keluaran Seven Segment dari Input 74LS47 Input 74LS47 Output Seven Segmnet Angka 0 00H 0 1 01H 1 2 02H 2 3 03H 3 4 04H 4 5 05H 5 6 06H 6 7 07H 7 8 08H 8 9 09H 9
f. Rangkaian Catu Daya
Rangkaian penurun tegangan ini dibutuhkan karena mikrokontroller hanya membutuhkan tegangan +5 volt untuk Vcc sistem dan jika kurang dari +4,5 volt, maka mikrokontroller akan reset dan dapat membuat modul program menjadi kacau untuk itu di butuhkan rangkaian catu daya sebagai penurun tegangan ini untuk mendapatkan tegangan yang dibutuhkan. Gambar rangkaian catu daya dapat dilihat dibawah ini :
Rangkaian catu daya pada gambar 3.10 merupakan rangkaian yang digunakan untuk memberikan catu daya ke sistem dari tegangan PLN. Karena tegangan PLN sebesar 220V AC maka diperlukan transformator penurun tegangan (transformator step-down) untuk menghasilkan tegangan 5V AC, keluaran dari transformator tersebut sebesar 5V AC maka diperlukan dioda sebagai penyearah sehingga dapat menghasilkan tegangan 5V DC berbentuk tegangan searah namun masih memiliki noise yang tinggi, keluaran dari dioda tersebut menuju ke kapasitor 1000uF/25v yang berfungsi sebagai filter arus dan menghilangkan noise yang
didapatkan dari penyearah, sehingga hasil tegangan dc yang didapatkan mendekati garis lurus. Setelah melalui kapasitor arus menuju ke IC regulator yang berfungsi sebagai penstabil tegangan, seri yang digunakan LM 7805 untuk tegangan 5V DC. Keluaran dari IC ini berkisar antara 4,8 – 5V DC. IC ini sangat diperlukan sekali dikarenakan tegangan yang dibutukan mikrokontroler harus benar benar stabil dan tidak boleh melebihi dari 5V DC.
8. Rancangan Modul Program
Sub bab ini menjelaskan tentang modul program yang digunakan untuk mengontrol kerja dari alat yang dirancang. Rancangan modul dapat menjadi dua bagian yaitu:
flowchart dan listing program.
a. Flowchart
Modul program dirancang memiliki struktur dengan kualitas yang baik dan mudah dimengerti, maka sebelum pembuatan listing program perlu diawali dengan penentuan logika program. Logika dasar gambaran pada penulisan ini adalah dengan menggunakan
flowchart seperti gambar berikut:
b. Modul Program
Pada sub bab ini diuraikan mengenai modul program untuk aplikasi remote control dengan memakai Bahasa Pemrograman CodeVision AVR. Dalam program ini terbagi kedalam beberapa sub-sub program yang mempunyai fungsi-fungsi tersendiri.
/************************************* ****************
This program was produced by the CodeWizardAVR V2.03.4 Standard Automatic Program Generator
© Copyright 1998-2008 Pavel Haiduc, HP InfoTech s.r.l. http://www.hpinfotech.com Project : Version : Date : 11/3/2014 Author : Company : Comments:
Chip type : ATmega16 Program type : Application Clock frequency : 8.000000 MHz Memory model : Small
External RAM size : 0 Data Stack size : 256
************************************* ****************/
#include <mega16.h> #include <delay.h>
// Declare your global variables here int pwm=50; void aktif() { if(PINA.1==1) /*switch 0*/ { pwm++; OCR1A=pwm; } if(PINA.2==1) /*switch 1*/ { pwm--; OCR1A=pwm; } if(PINA.0==1) /*switch 1*/ { OCR0=0; PORTC=0x00; } } void main(void) {
// Input/Output Ports initialization // Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTA=0x00;
DDRA=0x00; // Port B initialization
// Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out
// State7=0 State6=0 State5=0 State4=0 State3=0 State2=0 State1=0 State0=0
PORTB=0x00; DDRB=0xFF; // Port C initialization
// Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out
// State7=0 State6=0 State5=0 State4=0 State3=0 State2=0 State1=0 State0=0
PORTC=0x00; DDRC=0xFF; // Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTD=0x00;
DDRD=0xFF;
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: 8000.000 kHz // Mode: Fast PWM top=FFh // OC0 output: Non-Inverted PWM TCCR0=0x05;
TCNT0=0x94; OCR0=0x00;
// Timer/Counter 1 initialization // Clock source: System Clock // Clock value: Timer 1 Stopped // Mode: Normal top=FFFFh // OC1A output: Discon. // OC1B output: Discon. // Noise Canceler: Off
// Input Capture on Falling Edge // Timer 1 Overflow Interrupt: Off // Input Capture Interrupt: Off // Compare A Match Interrupt: Off // Compare B Match Interrupt: Off TCCR1A=0x83; TCCR1B=0x01; TCNT1H=0x00; TCNT1L=0x00; ICR1H=0x00; ICR1L=0x00; OCR1AH=0x00; OCR1AL=0x00; OCR1BH=0x00; OCR1BL=0x00; // Timer/Counter 2 initialization // Clock source: System Clock // Clock value: Timer 2 Stopped // Mode: Normal top=FFh // OC2 output: Disconnected ASSR=0x00;
TCCR2=0x00; TCNT2=0x00; OCR2=0x00;
// External Interrupt(s) initialization // INT0: Off // INT1: Off // INT2: Off MCUCR=0x00; MCUCSR=0x00; // Timer(s)/Counter(s) Interrupt(s) initialization TIMSK=0x00;
// Analog Comparator initialization // Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80; SFIOR=0x00;
//PWM untuk mengatur kecepatan motor DC while (1) { if(PINA.0==1) { PORTC=0x01; aktif(); } }; } Kesimpulan
1. Remote kontrol berbasis frekuensi dapat digunakan untuk mengontrol suatu program aplikasi remote
Lampu kamar.
2. Bahasa Pemrograman C dapat digunakan dalam pembuatan program aplikasi remote Lampu kamar yang dapat dikontrol dengan remote
kontrol.
3. Mikrokontroller ATmega 8535 dapat dioptimalkan sebagai pengontrol remote Lampu kamar.
4. Mikrokontroller ATmega 8535 dapat dikoneksikan dengan IC RX/TX 2B. 5. Mikrokontroller ATmega 8535 juga
dapat menampilkan ouput ke seven
segment.
DAFTAR PUSTAKA
Atmel (1997), Flash Microcontroller Architectural Overview. Atmel Inc,
Http://www.atmel.com, USA. Atmel (1997),”ATmega 8535 Series Hardware
Description, Atmel Inc.,
Http://www.atmel.com, USA. Bishop, Owen, (2002), Dasar-Dasar
Elektronika, PT. Erlangga, Jakarta.
Ibrahim, K.F. dan Santosa Insap (1996),
Teknik Digital, Penerbit ANDI,
Yogyakarta.
Putra, Agfianto E., (2002), Belajar
Mikrokontroler AT89C51/52/55,
Gava Media, Yogyakarta. .
Suhata, (2004), Aplikasi Mikrokontroler
sebagai pengendali peralatan
Elektronik, Elek Media Komputindo,
Jakarta.
Wasito S., (2001), Vademekum Elektronika
Edisi Kedua, PT. Gramedia Pustaka
Utama, Jakarta.