Nella Marwah, Supriyanto, Lingga Hermanto
Departemen Fisika, Fakultas Matematika dan Ilmu Pengetahuan Alam
Abstrak
Rancangan sistem akuisisi data suhu terhadap fungsi kedalaman sumur pengeboran dibuat untuk mengurangi biaya produksi eksplorasi pada sumur pengeboran terutama sumur pengeboran panasbumi. Sistem ini dapat membaca suhu terhadap variasi kedalaman sensor suhu secara real-time. Sistem ini terdiri dari sensor suhu Pt-100, sensor kedalaman rotary encoder dan pewaktu real-time DS1307. Sistem ini dioperasikan oleh mikrokontroler H8/3069F yang memiliki resolusi 16 bit menggunakan bahasa pemrograman C, data dikirimkan ke komputer melalui kabel serial RS-232 dan ditampilkan dalam bentuk Graphical User Interface (GUI) yang dihasilkan oleh bahasa pemrograman Python, data ini disimpan dalam bentuk file dokumen. Sensitivitas dari sistem pengukur suhu dengan Pt-100 adalah sebesar 0.042 V/°C.
Kata kunci : data suhu, kedalaman sumur pengeboran, sensor Pt-100, rotary encoder, pewaktu real-time, mikrokontroler H8/3069F, GUI, Bahasa C, Python
Abstract
Temperature acquisition system design along the borehole’s depth have been done in order to minimalize exploration production cost in borehole especially for geothermal exploration. The system can acquire temperature data versus depth variation in real-time. The system consists of Pt-100 as temperature sensor, rotary encoder as depth sensor and Real-Time Clock DS1307. The system is operated by 16-bit microcontroller H8/3069F using C Languange, temperatureand borehole’s depth data are displayed using a Python Graphical User Interface (GUI) and stored in document file. Sensititvity of Pt-100 sensor together with signal conditioning circuit is 0.042 V/°C.
Keywords: temperature data, borehole’s depth, Pt-100 sensor, rotary encoder, Real-time clock, microcontroller H8/3069F, GUI, C language, Python
I. PENDAHULUAN
Panasbumi merupakan salah satu subdsiplin dari geofisika yang mempelajari tentang aliran panasbumi. Para peneliti teknologi pembangkit tenaga listrik uap dan pembangkit listrik tenaga panasbumi menjadikan ilmu panasbumi ini untuk mendapatkan pengetahuan mengenai suhu di bawah permukaan bumi yang menjadi dasar untuk memahami aliran panas didalam bumi. Aliran panas pada suatu lubang bor didapatkan dari sekumpulan kombinasi dari data suhu pada kedalaman tertentu dan konduktivitas termalnya[1].
suhu panasbumi merupakan sebuah nilai yang menunjukkan kenaikan suhu seiring dengan bertambahnya kedalaman bumi. Berikut persamaan dasar aliran panas per satuan waktu:
! = !" !!!!!
!!!!! (1)
dimana Q merupakan aliran panas per satuan waktu (W), k merupakan konduktivitas termal (W/m°C), A merupakan luas area panas (m2) , l
1 merupakan panjang daerah panas awal (m), dan l2 merupakan panajang daerah panas akhir (m), T1 merupakan suhu awal (°C) dan T2 merupakan suhu akhir (°C).
Pada daerah yang bukan merupakan area panasbumi, konduktivitas normal gradien suhu sekitar 3°C/100 m[2]. Sementara pada daerah yang memiliki potensi panasbumi, gradien suhu beberapa kali lebih besar dibandingkan daerah lainnya.
Sistem akuisisi data suhu terhadap kedalaman lubang sumur sangat dibutuhkan dalam proses eksplorasi sumur pengeboran terutama pengeboran panasbumi. Pembuatan sistem akuisisi data suhu pada sumur pengeboran panasbumi disebabkan panasbumi membutuhkan informasi aliran panas pada suatu area prospek panasbumi dimana data suhu terhadap kedalaman merupakan data yang dapat membangun informasi aliran panas pada daerah tersebut.
Umumnya sistem akuisisi ini sangatlah mahal dan alatnya sulit untuk didapatkan di dalam negeri. Untuk meminimalisasi biaya pengadaan alat dan sistem akuisisi data suhu diperlukan sistem akuisisi data suhu terhadap kedalaman sumur pegeboran dari dalam negeri.
Pada penelitian ini telah dirancang sebuah sistem akuisisi data suhu dengan sensor pt-100 terhadap fungsi kedalaman sumur pengeboran yang dapat mengakuisisi data suhu bersamaan dengan data kedalaman secara real-time berbasis mikrokontroler H8/3069F 16 bit. Data hasil akuisisi tersebut dapat dipantau oleh pengguna dan disimpan dalam bentuk file dokumen. Proses pemantauan dan penyimpanan data dapat diaktifkan melalui Graphical User Interface (GUI) dengan menggunakan bahasa pemrograman Python yang merupakan jenis bahasa pemrogramman open-source.
II. METODA PERANCANGAN ALAT
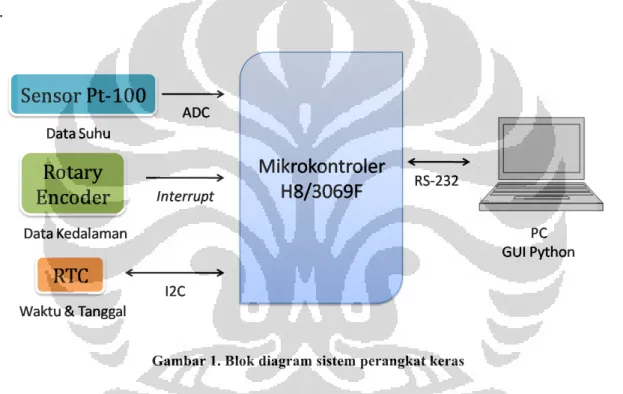
Sistem akuisisi data suhu terhadap kedalaman sumur pengeboran terdiri dari sensor suhu berupa pt-100, sensor kedalaman yaitu rotary encoder dan pewaktu real-time RTC DS1307 yang menyajikan data tanggal dan waktu. Sistem ini dikontrol dan dikendalikan dengan sebuah mikrokontroler H8/3069F buatan Renesas Corp,. Jepang[3]. Data suhu,dan kedalaman serta data waktu dan tanggal dikirim secara bersamaan melalui kabel serial RS-232 ke komputer. Akuisisi data diaktifkan dan disimpan datanya melalui GUI python yang telah diprogram di komputer. Gambar 1. memperlihatkan blok diagram perangkat keras pada sistem akuisisi melalui pemrogramman data suhu terhadap kedalaman sumur pengeboran secara real-time.
Gambar 1. Blok diagram sistem perangkat keras
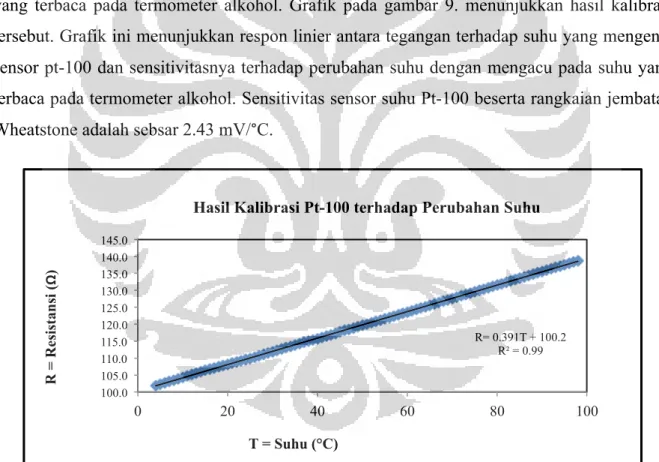
Sensor pt-100 yang digunakan pada sistem akuisisi ini merupakan salah satu jenis sensor RTD dengan bahan logam platina sebagai material pendeteksinya. Material ini memiliki resistansi yang berubah seiring dengan adanya perubahan suhu yang mengenai material sensor tersebut. Jika suhu naik, maka resistansinya mengalami kenaikan begitu pula sebaliknya. Hasil kalibrasi sensor pt-100 menunjukkan sensitivitas sensor pt-100 terhadap perubahan suhu adalah sebesar 0.39 Ω/°C.
Sensor pt-100 membutuhkan tegangan stimulasi eksternal agar keluarannya dapat berbentuk tegangan. Oleh karena itu, sensor pt-100 dihubungkan dengan rangkaian jembatan Wheatstone dengan empat lengan resistansi. Sensor pt-100 sebagai salah satu lengan resistansi
memiliki sensitivitas sebesar ±2 mV/°C. Proses kalibrasi sensor pt-100 beserta rangkaian jembatan Wheatstone dilakukan dengan merubah suhu yang mengenai sensor (pembacaan suhu dengan menggunakan termometer alkohol) dan mengukur nilai tegangan keluaran dari jembatan Wheatsone (pada gambar 2. ditunjukkan dengan lambang Vout).
Gambar 2. Rangkaian jembatan Wheatstone yang digunakan
Data suhu didapatkan dari sinyal analog sensor pt-100 beserta rangkaian jembatan Wheatstone yang diterima oleh mikrokontroler kemudian dikonversi ke dalam bentuk sinyal dengan menggunakan salah satu pin ADC pada mikrokontroler H8/3069F. Agar sinyal analog dapat dibaca dengan baik oleh ADC mikrokontroler yang memilki resolusi 10 bit maka sinyal keluaran dari jembatan Wheatstone memerlukan penguatan. Penguatan ini dilakukan dengan menghubungkan sinyal keluaran dari jembatan Wheatstone A dan B ke sebuah rangkaian penguat diferensial. Rangkaian penguat diferensial yang digunakan pada penelitian ini terlihat pada gambar 3.
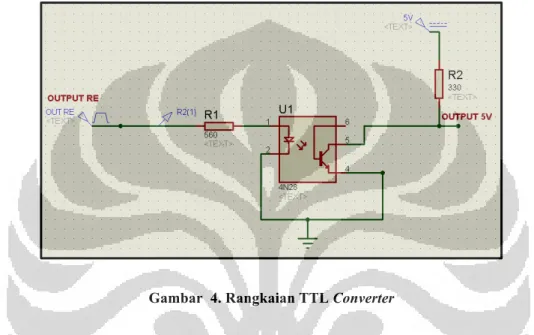
Rotary encoder berfungsi sebagai pendeteksi kedalaman dengan memanipulasi gerak translassi sensor suhu menjadi gerak angular dari rotary encoder sehingga menjadi informasi kedalaman. Sensor ini memiliki dua output, setiap outputnya memiliki dua kondisi bergantian yakni 1 (10 V) dan 0 (0V). Keluaran dari sensor ini kemudian melewati rangkaian TTL Converter sehingga keluaran sensor pada saat HIGH (1) dan LOW (0) memiliki tegangan 5 V dan 0 V yang dapat diterima oleh mikrokontroler. Gambar 4. menunjukkan rangkaian TTL Converter yang digunakan pada penelitian ini.
Gambar 4. Rangkaian TTL Converter
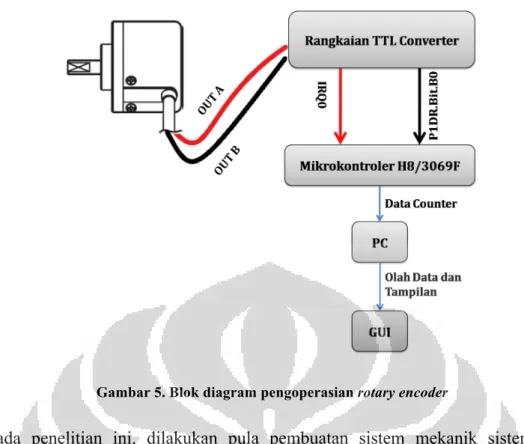
Keluaran pertama digunakan untuk port I/O (dalam penelitian ini digunakan PORT I/O 1 (pin 1) sebagai pendeteksi kedalaman sensor pt-100 dan keluaran kedua dihubungkan ke port interrupt (IRQ0) untuk menginterupsi proses perhitungan putaran. Data rotary encoder diterima mikrokontroler dalam bentuk data counter. Data counter bertambah dan berkurang dipengaruhi oleh penginterupsi yang terjadi jika PORT 1 pin 1 memiliki kondisi 1 atau 0. Gambar 5. memperlihatkan keseluruhan pengoperasian rotary encoder.
Gambar 5. Blok diagram pengoperasian rotary encoder
Pada penelitian ini, dilakukan pula pembuatan sistem mekanik sistem pengukur kedalaman yang bertujuan untuk menjalankan fungsi sensor kedalaman untuk mengetahui sejauh mana sensor suhu turun ke dalam sumur. Sensor pt-100 yang telah dihubungkan dengan kabel sepanjang 100 m didesain untuk melewati sebuah tiang penyangga yang ditengahnya terdapat semacam katrol tempat lewatnya kabel sensor suhu. Katrol ini dipasang satu sumbu dengan sebuah batang yang melintang pada masing-masing ujung tiang pada penyangga ini. Kemudian di salah satu ujung batang yang melintang terdapat rotary encoder sehingga ketika kabel sensor suhu bergerak melewati katrol maka batang akan ikut bergerak yang menyebabkan rotary encoder juga ikut bergerak. Gambar 6. menunjukkan mekanik sistem pengukur kedalaman yang akan dilewatkan sensor suhu ketika sensor suhu diturunkan ke dalam sumur.
Gambar 6. Mekanik sistem pengukur kedalaman
Kemudian setelah mekanik sistem pengukur kedalaman selesai dibuat, maka dilakukan proses kalibrasi sensor rotary encoder, untuk mengetahui respon rotary encoder terhadap perubahan kedalaman dengan meletakkan kabel sensor suhu pada mekanik tiang penyangga dan menurunkannya tiap 0.5 m dan dilihat data counter yang terbaca pada komputer. Data penurunan kabel setiap 0.5 m dicatat bersamaan dengan data counter di setiap penurunannya.
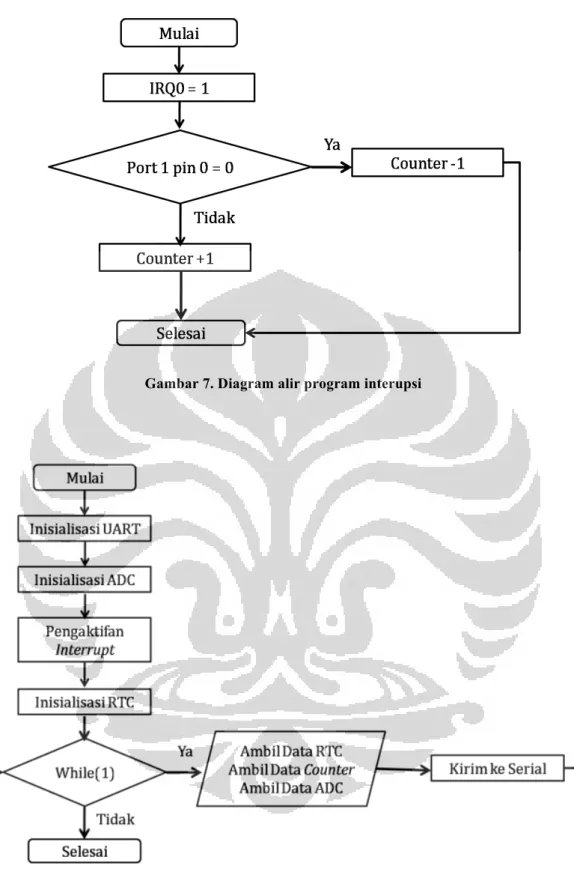
Data counter dan data ADC dikirimkan secara terus menerus oleh mikrokontroler secara bersamaan dengan data waktu dan tanggal yang dihasilkan RTC DS1307 dari mikrokontroler kepada komputer melalui komunikasi serial dengan menggunakan kabel serial RS-232 dan proses pengambilan data dan pengiriman data ke serial pada mikrokontroler H8/3069F menggunakan bahasa pemrograman C. Gambar 7. menunjukkan alir program interupsi dan gambar 8. menunjukan diagram alir pemrograman utama yang digunakan pada penelitian ini.
Gambar 7. Diagram alir program interupsi
Gambar 8. Diagram alir program utama
Proses pengolahan data counter menjadi data kedalaman dan data digital ADC menjadi data suhu dilakukan di GUI dengan bahasa pemrograman Python dengan menggunakan fungsi persamaan hasil kalibrasi dari masing-masing sensor. Selain itu,
pengguna juga dapat membaca data hasil pengolahan data berupa nilai suhu dan kedalaman serta grafik suhu terhadap kedalaman pada GUI tersebut Data sebelum dan sesudah pengolahan serta tanggal dan waktu setiap data akan tersimpan di dalam file dokumen.
III. HASIL DAN PEMBAHASAN
Rangkaian pengondisi sinyal dari keluaran sensor suhu pt-100 digunakan pada penelitian ini sebagai pengubah sinyal keluaran sensor pt-100 sebagai resistansi menjadi tegangan dan dapat dibaca dengan baik doleh ADC mikrokontroler. Rangkaian pengondisi sinyal terdiri dari dua rangkaian yakni rangkaian jembatan Wheatstone dan rangkaian penguat diferensial.
Rangkaian jembatan Wheatstone terlihat pada gambar 2. Dengan menggunakan rangkaian ini, dilakukan kalibrasi antara tegangan diferensial pada titik A dan B (lihat gambar 2) dan suhu yang terbaca pada termometer alkohol. Grafik pada gambar 9. menunjukkan hasil kalibrasi tersebut. Grafik ini menunjukkan respon linier antara tegangan terhadap suhu yang mengenai sensor pt-100 dan sensitivitasnya terhadap perubahan suhu dengan mengacu pada suhu yang terbaca pada termometer alkohol. Sensitivitas sensor suhu Pt-100 beserta rangkaian jembatan Wheatstone adalah sebsar 2.43 mV/°C.
Gambar 9. Grafik kalibrasi pt-100 berupa resistansi terhadap perubahan suhu
Sensitivitas dari rangkaian jembatan Wheatstone kemudian diperkuat dengan menggunakan rangkaian penguat diferensial yang terlihat pada gambar 3. Titik A dan B pada gambar 2. akan terhubung dengan titik A dan B pada gambar 3. secara berturut-turut sebagai
R= 0.391T + 100.2 R² = 0.99 100.0 105.0 110.0 115.0 120.0 125.0 130.0 135.0 140.0 145.0 0 20 40 60 80 100 R = Resistansi ( Ω ) T = Suhu (°C)
masukan Non inverting dan Inverting. Sensor suhu pt-100 beserta pengondisi sinyalnya memilki sensitivitas sebesar 42.3 mV/°C atau sebesar 0.042 V/°C.
ADC mikrokontroler H8/3069F memiliki resolusi 10 bit, dengan tegangan referensi sebesar 5 V, ADC ini mampu menyediakan sensitivitas sebesar 0.005 V setiap bit digital ADC. Dengan demikian, sinyal analog yang berasal dari sensor suhu beserta rangkaian pengondisi sinyal telah cukup baik untuk dikonversi ke bentuk digital dengan menggunakan ADC pada mikrokontroler H8/3069F.
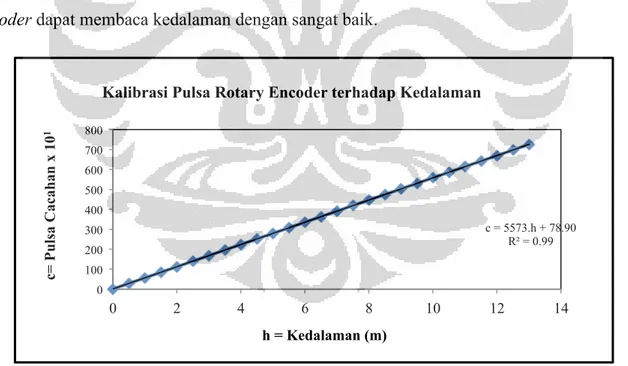
Sama halnya dengan sensor pt-100, proses kalibrasi dilakukan untuk mengetahui respon dari sensor rotary encoder beserta mekanik sistem pengukur kedalaman terhadap perubahan kedalaman kabel sensor suhu Pt-100. Dengan metode yang telah dijelaskan pada bagian sebelumnya, didapatkan hasil kalibrasi antara kedalaman pemantauan kabel sensor suhu dengan interval 0.5 m dengan pulsa counter yang terbaca di komputer yang diperlihatkan pada gambar 10. Koefisien relasi antara kedalaman pemantauan dan pulsa counter yang terbaca adalah sebesar 0.99. Nilai ini memperlihatkan bahwa respon sensor rotary encoder yang sangat linier terhadap perubahan kedalaman sehingga dapat dikatakan sensor rotary encoder dapat membaca kedalaman dengan sangat baik.
Gambar 10. Grafik kalibrasi rotary encoder berupa pulsa cacahan terhadap kedalaman pemantauan
Data digital ADC dan data counter masing-masing merepresentasikan data suhu dan data kedalaman. Dengan menggunakan persaman hasil kalibrasi dari sensor suhu pt-100 dan sensor rotary encoder dilakukan pengolahan data pada data digital ADC dan data counter dengan menggunakan bahasa pemrograman Python dan ditampilkan pada GUI berupa data
c = 5573.h + 78.90 R² = 0.99 0 100 200 300 400 500 600 700 800 0 2 4 6 8 10 12 14 c= Pulsa Cacahan x 10 1 h = Kedalaman (m)
suhu, data kedalaman, dan repersentasi kedua data dalam bentuk grafik plot dengan sumbu X adalah data kedalaman dan sumbu Y adalah data suhu. Karena sistem akuisisi data memerlukan sistem real-time, maka data tanggal dan waktu yang dihasilkan oleh RTC DS1307 diambil bersamaan data digital ADC dan data counter. Data tanggal, waktu, digital ADC, counter, suhu dan kedalaman kemudian disimpan dalam file dokumen setiap kali proses penyimpan dilakukan. Pada gambar 11. diperlihatkan tampilan GUI pada proses pengukuran
Gambar 11. Tampilan GUI pada saat proses pengukuran
. GUI terdiri dari titlebar, toolbar, panel 1 dan panel 2 dan statusbar. Titlebar berada dibagian paling atas pada GUI sedangkan status bar berada di bagian paling bawah pada GUI. Bagian toolbar berisi choice box untuk memilih jenis port dan baudrate, tombol connect dan disconnect untuk mengoneksikan atau memutuskan hubungan antara komputer dengan mikrokontroler, tombol clear untuk menghapus data dan tombol simpan data. Pada panel 1 terdapat kolom yang menyediakan nilai suhu, kedalaman dan status koneksi secara berturut-turut dari atas hingga bawah. Sedangkan pada panel 2 terdapat grafik dan tabel yang berisi data tanggal, waktu, counter, ADC, kedalaman, dan suhu.
GUI dapat mengakuisisi data dengan sampling time (waktu cuplik) per satu baris data setiap 1 detik. Memori yang dibutuhkan hanya sedikit berupa kisaran puluhan kB. Memori ini
Pada gambar 11. dapat dilihat adanya kenaikan suhu seiring dengan kenaikan nilai kedalaman, gambar tersebut merupakan hasil akuisisi data terhadap kedalaman sumur pada saat simulasi pengukuran pada sumur.
Sumur simulasi dibuat dengan menaikkan nilai suhu dengan menaikkan nilai kedalaman secara bersamaan. Sumur simulasi ini bertujuan untuk memperlihatkan bahwa sistem akuisis data telah dapat mengambil data suhu, data kedalaman, beserta data tanggal dan waktu secara bersamaan pada waktu yang sama.
Untuk mengetahui keseluruhan rancangan sistem pengukur kedalaman yang telah terintergrasi dengan GUI pada komputer berjalan dengan baik dan memiliki kesalahan relatif terhadap nilai yang benar yang kecil, dilakukan pengujian nilai kedalaman penurunan sensor suhu yang terbaca pada GUI dengan kedalaman sebenarnya yang dipantau oleh penulis.
Kedalaman sebenarnya didapatkan dari besarnya penurunan kabel yang tertera pada label pada kabel yang menyatakan ukuran panjang pada kabel sensor suhu setiap setengah meter. Kesalahan didapatkan dari nilai perbedaan antara kedalaman pada pemantauan dengan kedalaman yang terbaca pada GUI, kemudian dihitung besarnya kesalahan relatif dari nilai kesalahan pada tiap data suhu yang terbaca pada GUI terhadap nilai kedalaman pemantuan.
Gambar 12. Hasil pengujian data kedalaman yang terbaca pada GUI dan data kedalaman berdasarkan pemantauan
Pada gambar 12. terlihat kesalahan data kedalaman yang tampil pada GUI dan kedalaman pada pemantauan . Sumbu X merupakan nomor data kedalaman setiap pengukuran yang ditentukan dan sumbu Y merupakan data kedalaman. Data dengan titik biru
0.0 2.0 4.0 6.0 8.0 10.0 12.0 14.0 1 3 5 7 9 11 13 Kedalaman (m) Data ke- (n)
Pengujian data kedalaman yang terbaca pada GUI dan data kedalaman berdasarkan pemantauan
Kedalaman pemantauan Kedalaman pada GUI
merupakan data kedalaman pemantauan, sedangkaan data dengan titik merah memperlihatkan data kedalaman yang terbaca pada GUI.
Pada pengujian ini kesalahan relatif pada pengukuran kedalaman dari 0-13 m sebesar 0%, artinya kesalahan data kedalaman yang dihasilkan sistem dan ditampilkan tidak terlihat. Kemungkinan kesalahan data relatif akan dihasilkan jika kabel sensor semakin turun jauh melebihi kedalaman pada pengujian ini. Hal ini disebabkan adanya gaya gravitasi yang semakin besar jika sensor suhu semakin turun ke bawah.
Sama halnya dengan pengujian kedalaman, untuk mengetahui keseluruhan rancangan sistem pengukur suhu yang telah terintegrasi dengan GUI komputer berjalan dengan baik dan memiliki kesalahan relatif terhadap nilai benar yang kecil dilakukan pengujian nilai suhu yang terbaca di GUI dengan suhu pada termometer alkohol. Proses yang dilakukan sama halnya dengan proses kalibrasi, yakni dengan mencelupkan pt-100 ke dalam pyrex berisi air dan dipanaskan di atas kompor listrik, besarnya panas diatur perlahan. Tepat di samping sensor pt-100 diletakkan termometer alkohol agar termometer alkohol dan sensor pt-pt-100 memiliki suhu lingkungan sekitar yang sama. Kemudian data suhu yang terbaca pada GUI dan termometer alkohol dicatat bersamaan. Nilai kesalahan didapatkan dari selisih nilai suhu yang terbaca pada GUI dan suhu ang terbaca pada termometer alkohol, sedangkan nilai kesalahan relatif didapatkan dari besar nilai kesalahan disetiap data suhu yang tebaca pada GUI terhadap nilai suhu yang terbaca pada termometer alkohol.
Gambar 13. Pengujian data suhu yang terbaca pada GUI dan suhu pada termometer alkohol
Data dengan titik biru merupakan data suhu yang terbaca pada termometer alkohol, 0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0 90.0 100.0 0 10 20 30 40 50 60 70 80 90 100 Suhu ( °C) Data ke- (n)
Pengujian data suhu yang terbaca pada GUI dan suhu pada termometer alkohol
Suhu pada termometer alkohol
Pada pengujian ini rata-rata kesalahan data kedalaman yang tampil di GUI adalah sebesar 0.1 dari nilai seharusnya, sedangkan rata-rata kesalahan relatif adalah 0.4% . Kesalahan di atas dapat disebabkan adanya perbedaan waktu kenaikan pembacaan antara sensor pt-100 dan termometer alkohol. Pada praktiknya, sensor pt-100 mampu membaca perubahan sensor pt-100 ketika suhu berada di luar suhu ruangan lebih cepat dibandingkan termometer alkohol.
Untuk menguji sistem akuisisi ini dapat berjalan dengan baik di lapangan dilakukan uji pengukuran suhu terhadap kedalaman pada lubang sumur departemen Fisika UI dengan kedalaman sebesar 20 m dan sumber mata air panas Gunung Pancar, Bogor dengan kedalaman 3.5 m. Proses pengukuran dilakukan dengan menurunkan kedalaman sensor suhu pt-100 melewati tiang penyangga dengan besar interval kedalaman sebesar 1 m untuk lubang sumur Departemen Fisika UI Besarnya kedalaman dipantau melalui GUI, setelah proses penurunan selesai setiap interval, kemudian sensor didiamkan terlebih dahulu untuk menyesuaikan suhu sekitarnya. Setelah nilai sensor suhu mulai stabil, maka proses penyimpanan data dilakukan dengan menekan tombol pada GUI, proses penyimpanan ini dilakukan 1 menit untuk mengambil 60 data. Setelah proses penyimpanan selesai, maka tombol ditekan kembali dan akan muncul data yang sebelumnya tersimpan pada grafik.
Pada pengukuran suhu terhadap kedalaman lubang sumur Departemen Fisika UI, dilakukan pengukuran sebanyak tiga kali. Tanggal, waktu dan kondisi pengukuran pada setiap pengukuran di Departemen Fisika UI tertera pada tabel 1. Data diambil sebanyak 60 kali pada setiap titik kedalaman kemudian data suhu di rata-ratakan dan dihitung standar deviasi dari setiap data. Nilai rata-rata suhu pada setiap titik kedalaman (hingga kedalaman 20 m) dibentuk grafik. Sumbu X merupakan nilai rata-rata suhu, sumbu Y merupakan nilai kedalaman.
Gambar 15. Grafik seluruh hasil pengukuran suhu terhadap kedalaman di Departemen Fisika UI
Gambar 15. menunjukkan grafik hasil pengukuran suhu. Pada gambar terlihat bahwa nilai awal pada pengukuran pertama (tanggal 17-04-2013) berbeda jauh apabila dibandingkan dengan pengukuran kedua (tanggal 16-04-2013 (1)) dan ketiga (tanggal 16-04-2013 (2)) yang nilai suhu awalnya tidak berbeda jauh. Hal ini disebabkan karena suhu permukaan pada pengukuran pertama berbeda dengan pengukuran kedua dan ketiga.
Pada pengukuran kedua, suhu permukaan (pada kedalaman 0 m) yang dibaca sensor pt-100 adalah sebesar 30.3 °C sedangkan suhu pada kedalaman 1 m mengalami kenaikan sebesar 0.1 °C menjadi 34 °C. Kenaikan ini dapat disebabkan pada awal pengukuran sensor pt-100 belum menyesuaikan dengan suhu sekitar dan kemungkinan besaran fisis lain yang tidak diperhitungkan pada penelitian ini seperti kelembapan dan tekanan yang berbeda yang dapat mempengaruhi besarnya nilai suhu pada kedalaman 0 dan 1 m.
Suhu pada kedalaman berikutnya hampir konstan dan sama dengan suhu sebelumnya yakni berada pada suhu 29.9 – 30.3 °C. Perbedaan suhu mulai terlihat kedalaman 16 m, pada kedalaman ini nilai suhu awalnya naik kemudian mengalamai penurunan hingga 29.1 °C pada saat kedalaman mencapai 20 m. Seperti pengukuran sebelumnya, pada kedalaman 16 m – 20 m sensor pt-100 telah mengenai air yang memiliki suhu berbeda dan keadaan lainnya yang berbeda seperti tekanan dan kelembapan udaranya.
Pengukuran ketiga tidak jauh berbeda dengan pengukuran kedua, hal ini dikarenakan pengukuran dilakukan pada hari yang sama dan waktu yang tidak berbeda jauh.
28.5 29.0 29.5 30.0 30.5 31.0 31.5 32.0 32.5 33.0 33.5 34.0 0.0 5.0 10.0 15.0 20.0 25.0 Suhu ( °C) Kedalaman (m)
Hasil Pengukuran Suhu terhadap kedalaman pada lubang sumur Dept. Fisika UI
Data 17-04-2013
Data 16-05-2013 (2)
Pada dasarnya, saat sensor suhu semakin turun ke bawah, maka semakin tinggi pula kenaikan suhu. Pada daerah non prospek panas bumi secara praktik dapat dikatakan suhu hampir tetap, tetapi sesungguhnya terjadi kenaikan suhu yang sangat perlahan yakni 3 °C/ 100 m atau 0.003 °C/m dan resolusinya sangat kecil. Pernyataan tersebut belum dapat kita buktikan pada penelitian ini, hal ini dikarenakan kedalaman sumur yang masih dangkal yakni sebesar 20 m dan resolusi sensor yang belum dapat mendeteksi perubahan yang amat kecil dari perubahan suhu yang terjadi.
IV. KESIMPULAN
Sensor Pt-100 beserta rangkaian pengondisi sinyalnya memiliki sensitivitas sebesar 42.4 mV/°C atau 0.042 V/°C sehingga rangkaian ini cukup baik dibaca oleh ADC mikrokontroler H8/3069F yang memiliki resolusi 10 bit atau dapat membaca tegangan 0.005 V/bit.
Sensor rotary encoder buatan Autonics tipe E40S6-1000-3-T-24 mampu bekerja dengan sangat baik untuk pengukuran yang membutuhkan ketelitian 100 cm atau 0.1 m dengan menggunakan rangkaian TTL Converter pengubah level tegangan dari 10 V ke 5 V untuk masuk ke mikrokontroler. Keluaran dari tegangan ini berupa pulsa-pulsa dibaca sebagai pulsa counter yang dicacah oleh mikrokontroler H8/3069F.
Mikrokontroler H8/3069F telah mampu mengoperasikan sistem akuisisi data suhu dengan sensor Pt-100 bersamaan dengan sensor rotary encoder sebagai pendeteksi posisi kabel yang mengindikasikan nilai kedalaman sensor suhu Pt-100 dengan fitur ADC, dan Interrupt Controller yang ada didalamnya secara real-time. Data hasil akuisisi ditampilkan dan diolah oleh GUI Python dan data dapat disimpan dalam bentuk file dokumen.
V. SARAN
1. Resolusi ADC yang lebih besar untuk menambah ketelitian pembacaan data suhu 2. Penggunaan sistem otomatis penurun kabel sensor suhu dengan motor terintergrasi
dengan rotary encoder
3. Minimalisasi ukuran alat untuk pengoperasian pada saat pengukuran di lapangan 4. Permodelan sumur dengan gradien suhu yang cukup baik untuk digunakan dalam
DAFTAR ACUAN
[1] Prensky, S. (1992). Temperature Measurements in Boreholes: An Overview of Engineering and Scientific Applications. The Log Analyst , 33, 313-333
[2] B.Sanner, S. (2001, Juni). Geothermal Energy. GHC Bulletin, p.16
[3] Renesas Electronic Corp. (2010, September 04). Dikutip Januari 03, 2013, dari http://tokyo-ct.net/usr/kosaka/for_students/H8/h8_3069Hardwaremanual.pdf