1069
RANCANG BANGUN SISTEM KONTROL CASCADE LEVEL DAN FLOW PADA PROSES WATER TREATMENT BERBASIS
BORLAND DELPHI
Karina Anggraeni1, Pujianto1, Astrie Kusuma Dewi1*
1Teknik Instrumentasi Kilang, Politeknik Energi Dan Mineral Akamigas, Jl. Gajahmada No, 38 Cepu, Blora, 58315
Email: [email protected]
ABSTRAK
Air bersih adalah salah satu kebutuhan utama semua makhluk hidup. Pada kondisi saat ini keterbatasan air bersih merupakan salah satu masalah yang umum terjadi, sehingga dibutuhkan suatu sistem water treatment yang digunakan untuk mengolah air kotor menjadi air bersih. Air kotor yang berasal dari sungai Bengawan Solo akan masuk ke tangki intake kemudian dipompakan menuju filter 4 tabung. Keluaran dari filter akan masuk ke tangki penampungan sementara. Pada tangki penampungan sementara dibutuhkan sistem pengendalian yang mengatur seberapa banyak debit air hasil dari pengolahan water treatment yang akan dialirkan ke tangki penampungan tetap untuk bisa digunakan sebagai air minum. Sistem pengendalian pada proses water treatment ini adalah sistem pengendalian cascade flow dan level. Sensor yang digunakan untuk membaca ketinggian level adalah sensor ultrasonik HC-SR04 dan sensor untuk membaca laju alir menggunakan sensor flow meter YF- S201. Untuk Human Machine Interface menggunakan aplikasi Borland Delphi. Kontrol cascade didesain menggunakan metode perhitungan direct synthesis sehingga mendapatkan nilai parameter level yaitu nilai Kp 16,08852 dan Ki 0,02722. Pada proses flow didapatkan nilai Kp 0,129723 dan nilai Ki 16,666667. Hasil rancangan sistem kontrol cascade mendapatkan nilai settling time sebesar 104,725s, delay time 15,329s, time constant 20,54s, tanpa overshoot dan tanpa error steady state.
Kata Kunci: Water Treatment, Direct Synthesis, Cascade
1. PENDAHULUAN
Air bersih adalah salah satu kebutuhan utama semua makhluk hidup. Pada kondisi saat ini, keterbatasan air bersih merupakan salah satu masalah yang umum terjadi. Hal ini karena banyaknya pencemaran yang dilakukan oleh pelaku usaha industri maupun oleh limbah rumah tangga. Oleh itu karena perlu adanya pengolahan air sebelum digunakan masyarakat agar air yang awalnya kurang baik menjadi air yang bersih dan sesuai dengan peraturan menteri kesehatan.[1]
Menurut Peraturan Menteri Kesehatan nomor 492 tahun 2010 tentang standar baku mutu kesehatan air minum, kadar maksimum air bersih TDS sebesar 500 mg/L, kekeruhan sebesar 5 NTU, dan warna maksimal sebesar 15 TCU, PH antara 6,5-8,5, tidak berbau dan tidak berasa.[2]
Melihat pentingnya penjagaan kualitas mutu air maka perlu dirancang suatu sistem kontrol yang bekerja secara otomatis untuk menjaga kualitas tersebut. Penelitian sebelumnya telah dilakukan dengan menganalisis bagaimana pengaruh laju aliran air terhadap kualitas air yang dihasilkan pada sistem pengolahan air bersih skala rumah tangga. Hasil penelitiannya adalah semakin besar aliran airnya maka efektivitas dari proses filtrasi semakin berkurang. [3]
Proportional integral derivative controller dipilih karena masing masing mode kontrol memiliki kelebihan masing masing untuk menciptakan proses yang stabil. Controller proportional berguna untuk mempercepat mencapai rise time, controller integral berguna
1070
untuk memperkecil nilai error, controller derivative berguna untuk meredam dan memperkecil overshoot. Untuk mendapatkan hasil terbaik, maka sebaiknya dengan menggabungkan semua aksi mode kontrol PID controller. [4]
Metode direct synthesis adalah metode yang digunakan untuk merancang atau mentuning agar mendapatkan nilai parameter kontroler melalui korelasi parameter plant. Target yang akan dicapai menggunakan metode tersebut yaitu bentuk karakteristik keluaran respon plant sama dengan respon model referensi. Proses untuk mencapai tujuan tersebut diperoleh dari model invers plant dan model direct referensi yang dilakukan sintesa melalui controller yang diperoleh dari sistem close loop. [5]
2. METODE
a. Desain Hardware
Berdasarkan latar belakang serta tinjauan terhadap penelitian sebelumnya, telah dilakukan penelitian perancangan sistem kontrol cascade level dan flow menggunakan PID Controller menggunakan perhitungan direct synthesis. Penelitian ini menggunakan sensor ultrasonik untuk mengetahui ketinggian dari level air dan sensor flow meter YF- S201 untuk mengukur laju aliran, serta menggunakan sensor TDS sebagai parameter untuk menentukan air layak digunakan untuk di minum. Program Borland Delphi di tambahkan sebagai interface untuk memunculkan nilai dari TDS dan juga proses kontrol cascade yang sedang berlangsung. Flow meter sensor adalah sensor yang digunakan untuk mengukur seberapa banyak debit air yang mengalir dalam suatu pipa. Prinsip kerjanya yaitu ketika ada yang mengalir maka akan menggerakkan rotor magnet dengan kecepatan tertentu sesuai seberapa cepat aliran airnya. Medan magnet pada rotor yang berputar akan menghasilkan sinyal pulsa dalam bentuk tegangan (pulse width modulation). [11] TDS (Total Dissolved Solids) merupakan jumlah total larutan padatan yang terkandung dalam air. Air selalu mengandung partikel terlarut yang berupa partikel padatan seperti aluminium, besi, tembaga dan mangan serta partikel non padatan seperti mikroorganisme. [12]. Sensor TDS ini digunakan untuk mengukur total jumlah padatan yang terkandung di dalam air yang dinyatakan dalam satuan mg/l. Prinsip kerja dari sensor TDS ini adalah dengan menghubungkan dua buah probe kemudian diberi beda potensial listrik (berbentuk sinusoida) maka probe tersebut akan mengalir arus listrik untuk mendapatkan nilai konduktansi larutan. [12]. Arduino Uno adalah sebuah mikrokontroler yang menggunakan prosesor ATMega328 dengan bahasa pemrograman yaitu C++. Arduino terdiri dari 14 pin digital input/output, 6 input analog, sebuah konektor USB, sebuah power jack, sebuah osilator Kristal 16 MHz dan sebuah tombol reset. Untuk menyalakan arduino uno dapat dihubungkan ke sebuah komputer melalui kabel USB.[10]. Gambar 1 berikut ini merupakan desain dalam perancangan hardware.
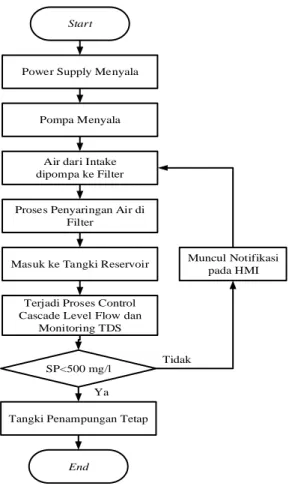
Tahapan awal yaitu dengan menyalakan power supply yang akan memberikan supply listrik ke komponen elektronika water treatment. Jika sudah mendapat supply listrik, maka pompa otomatis akan menyala. Air kotor dari intake tank dialirkan menggunakan pompa ke filter. Air yang masuk ke filter akan melewati proses penyaringan menggunakan filter 4 tabung. Air bersih hasil proses filtrasi akan masuk ke reservoir tank. Pada reservoir tank, terjadi proses control cascade dan juga monitoring TDS.
Ditentukan nilai set point TDS kurang dari 500 mg/l, jika nilai TDS tidak kurang dari 500 mg/l maka air dinyatakan kotor kemudian dimunculkan notifikasi pada HMI menyatakan air kotor kemudian akan dikembalikan ke intake tank untuk diolah kembali. Jika nilai TDS kurang dari 500 mg/l maka air dinyatakan sudah bersih dan akan masuk ke tangki penampungan tetap.
1071
Power Supply Menyala
Pompa Menyala
Air dari Intake dipompa ke Filter
Start
Proses Penyaringan Air di Filter
Masuk ke Tangki Reservoir
Terjadi Proses Control Cascade Level Flow dan
Monitoring TDS
End
Tangki Penampungan Tetap SP<500 mg/l
Muncul Notifikasi pada HMI
Tidak
Ya
Gambar 1. Proses Water Treatment
b. Desain Software
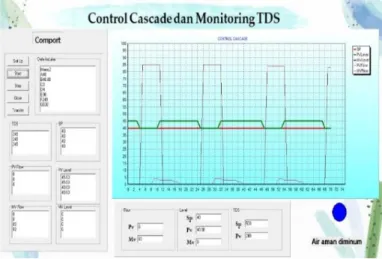
Pada desain software, untuk menampilkan hasil desain digunakan Borland Delphi yang berfungsi sebagai interface. Pada interface ini akan menampilkan set point, process variable, dan manipulated variable untuk proses flow dan level, set point dan process variable untuk proses monitoring TDS, dan juga menampilkan grafik dari sistem pengendalian cascade level dan flow. Gambar 2 merupakan gambar tampilan layar monitoring.
Gambar 2. Tampilan Borland Delphi
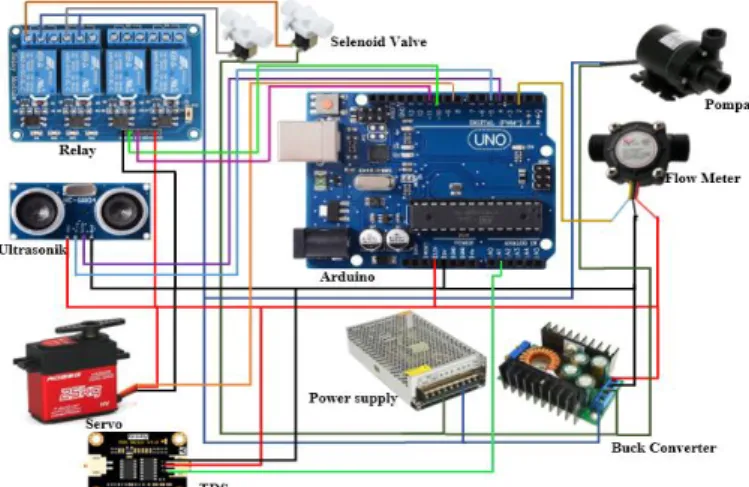
Tampilan wiring peralatan pada water treatment plant seperti pada gambar 3. Pada wiring gambar 3 dapat dilihat bahwa komponen yang tersambung ke pin digital arduino
1072
adalah servo valve, flow meter, selenoid valve, dan ultrasonik. Komponen yang akan masuk ke pin analog adalah sensor TDS yang digunakan untuk mengukur kejernihan air.
Selain itu juga terdapat power supply yang digunakan untuk memberi supply listrik untuk pompa, solenoid valve, dan buck converter. Buck converter digunakan untuk menurunkan tegangan dari power supply sebesar 12 volt menjadi 5 volt untuk dihubungkan dengan arduino dan servo valve.
Gambar 3. Wiring Arduino
Pada perancangan project water treatment, dibuat blok diagram sistem seperti pada gambar 4, dimana terdapat arduino yang berperan sebagai kontroler untuk mengendalikan semua sistem. Inputan yang masuk ke arduino yaitu sensor ultrasonik HC-SR04, flow meter YF-S201 dan sensor TDS. Output dari arduino ada perintah untuk menggerakkan control valve dan solenoid valve. Delphi 7 digunakan sebagai display dari proses kontrol water treatment.
Arduino
TDS UNO
Ultrasonik HC-SR04
Servo Valve Selenoid Valve
Delphi 7
Power Supply
Flow Meter YF-S201
Gambar 4. Blok Diagram Sistem 3. PEMBAHASAN
a. Bump Test Level
Bump test variabel proses level dilakukan pada saat controller dalam posisi manual.
Setelah controller telah dalam posisi manual, dimasukan nilai manipulated variable (MV) 5% dan biarkan beberapa saat, lalu nilai MV diubah menjadi 60% dan diambil datanya sebanyak 1144 sampel data. Dari bump test didapatkan hasil perhitungan gain
1073
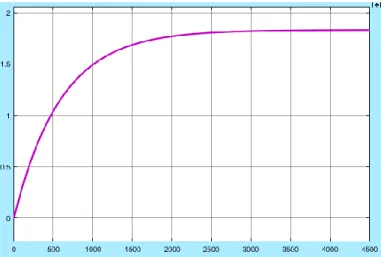
plant menggunakan system identification tools MatLab menghasilkan gain plant orde satu tanpa osilasi didapatkan nilai gain proses yaitu 1,8369
591,06𝑠+1 dengan fit to estimation data mencapai 88,89%. Untuk mengetahui karakteristik respon plant yang sudah didapatkan, plant transfer function dapat disimulasikan menggunakan Simulink MatLab dan menghasilkan respon seperti pada gambar 5 sebagai berikut:
Gambar 5. Hasil Respon Proses Level
b. Bump Test Flow
Bump test variabel proses flow dilakukan pada saat controller dalam posisi manual.
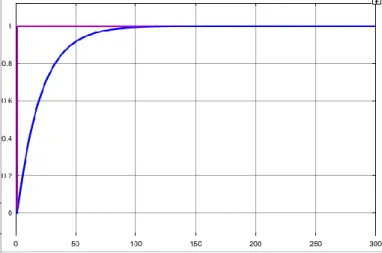
Setelah controller telah dalam posisi manual, dimasukan nilai manipulated variable (MV) 0 % dan biarkan beberapa saat, lalu nilai MV diubah menjadi 20% dan diambil datanya sebanyak 59 sampel data. Dari bump test didapatkan hasil perhitungan gain plant menggunakan system identification tools MatLab menghasilkan gain plant orde satu tanpa osilasi didapatkan nilai gain proses yaitu 0,1
0,0077834𝑠+1 dengan fit to estimation data mencapai 100%. Untuk mengetahui karakteristik respon plant yang sudah didapatkan, plant transfer function dapat disimulasikan menggunakan Simulink MatLab dan menghasilkan respon seperti pada gambar 6 sebagai berikut:
Gambar 6. Hasil Respon Proses Flow
Setelah dilakukan bump test, tahap selanjutnya yaitu melakukan analisa perhitungan untuk proses level dan flow menggunakan metode direct synthesis.
1074
c. Analisa Proses Level
Spesifikasi keluaran hasil sistem pengendalian level yang diinginkan yaitu keluaran sistem hasil mempunyai settling time ts (± 0,5%) sekitar 100 detik, eSS = 0 (zero offside) dan tidak memiliki overshoot. Hasil dari desain kontrol level menggunakan metode direct synthesis didapatkan response transient dengan nilai settling time sebesar 107,302s, dengan time constant sebesar 21,058s, delay time sebesar 15,043s tanpa adanya overshoot dan error steady state.
d. Analisa Proses Flow
Spesifikasi keluaran hasil sistem pengendalian flow yang diinginkan yaitu keluaran sistem hasil mempunyai settling time ts (± 0,5%) sekitar 3 detik, eSS = 0 (zero offside) dan tidak memiliki overshoot. Hasil dari desain kontrol level menggunakan metode direct synthesis didapatkan response transient dengan nilai settling time sebesar 4,194s, dengan time constant sebesar 1,596s, delay time sebesar 1,426s tanpa adanya overshoot dan error steady state.
e. Desain Control Cascade
Desain kontrol cascade dilakukan dengan menggabungkan nilai dari proses level dan flow kemudian dilakukan simulasi pada aplikasi MatLab dan menghasilkan respon seperti gambar 7 sebagai berikut:
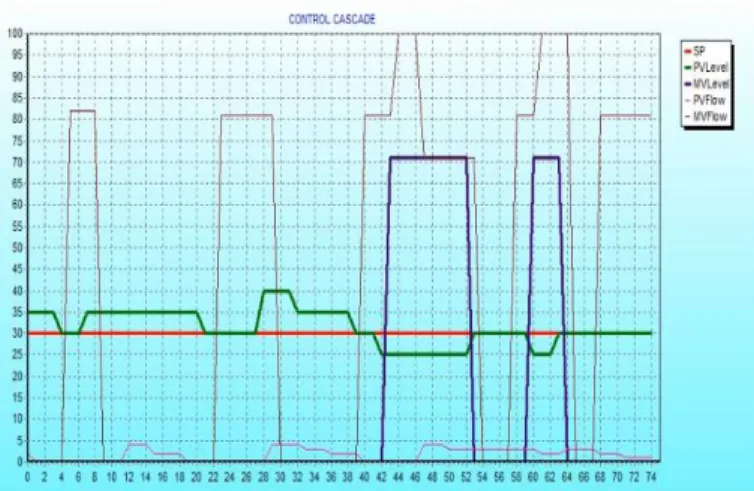
Gambar 7. Respon Sistem Kontrol Cascade
Dari grafik diatas maka didapatkan nilai respon sebagai berikut:
Tabel 1. Hasil Rancangan Sistem Cascade
No Spesifikasi Nilai
1 Settling Time 105,166s
2 Delay Time 15,550s
3 Time Constant 20,54s
4 Error steady state 0
5 Overshoot 0
f. Implementasi Plant
Pada proses implementasi plant, berikut beberapa percobaan yang dilakukan yaitu dengan mengubah nilai set point. Pada saat set point diubah dari 15% menjadi 25% dapat dilihat bahwa PV level berusaha mengejar SP dengan nilai settling time sebesar 59s, dengan time constant sebesar 38s, delay time sebesar 30s tanpa adanya overshoot dan error steady state.Pada saat set point diubah dari 50% menjadi 30% dapat dilihat bahwa PV level berusaha mengejar SP dengan nilai settling time sebesar 105s, dengan time
1075
constant sebesar 67s, delay time sebesar 53s tanpa adanya overshoot dan error steady state.
g. Uji Kehandalan 1. Uji Disturbance
Untuk mengetahui kehandalan sistem dilakukan dengan memberikan disturbance, disturbance dilakukan dengan memberi air secara tiba tiba kedalam tangki reservoir kemudian dilihat respon setelah dilakukan penambahan air tersebut, seperti terlihat pada gambar 8.
Gambar 8. PV Menuju SP
Pada saat set point steady state 30%, sistem pengendalian diberi disturbance positif dengan cara penambahan fluida dari sumber yang berbeda secara tiba tiba, didapatkan overshoot disturbance sebesar 83%. Kemudian controller langsung melakukan aksi dengan mengirimkan manipulated variable untuk menutup valve agar PV level dapat turun sehingga sesuai dengan set point dan PV kembali ke steady state set point membutuhkan waktu 347 detik.
2. Kemampuan kontroler dalam mempertahankan set point
Gambar 9. Kemampuan Kontroler Mempertahankan Set Point
Pada gambar 9 berikut dapat diketahui bahwa controller dapat mempertahankan process variable pada set point sangat baik. Hal tersebut karena pada detik ke 62, process variable turun dari 30% ke 25% kemudian pada detik ke 63, controller memberikan menambah mv agar bukaan servo valve bertambah sehingga process variable naik kembali ke set point sebesar 30%.
1076
h. Uji Sistem Monitoring
Nilai set point TDS menurut peraturan kementrian kesehatan nomor 492 tahun 2010 tentang Persyaratan Kualitas Air Minum, syarat nilai TDS yang aman untuk dikonsumsi yaitu senilai 500 ppm. Uji monitoring TDS dilakukan dengan melihat apakah sistem monitoring sudah sesuai dengan desain atau belum. Berikut ini gambaran dari HMI monitoring TDS.
1. Nilai TDS sesuai dengan set point
Saat nilai TDS sesuai dengan set point, maka pada HMI Borland Delphi akan muncul tulisan bahwa “air aman diminum” dan juga solenoid 2 akan terbuka untuk mengalirkan air ke tangki penampungan tetap. Dapat dilihat pada gambar 10 berikut ini.
Gambar 10. HMI Saat Nilai TDS Sesuai SP
2.
Nilai TDS tidak sesuai dengan set pointSaat nilai TDS tidak sesuai dengan set point, maka pada HMI Borland Delphi akan muncul tulisan bahwa “air melebihi batas aman dan filter perlu diganti” dan juga solenoid 1 akan terbuka untuk mengalirkan air ke tangki intake. Dapat dilihat pada gambar 11 berikut ini
Gambar 22. HMI Saat Nilai TDS Melebihi SP 4. SIMPULAN
Dari hasil penelitian, dapat disimpulkan bahwa Prototype water treatment menggunakan arduino uno sebagai mikrokontroler, sensor ultrasonik HC-SR04 sebagai pengukur level air,
1077
sensor flow meter YF-S201 sebagai pengukur laju aliran air, menggunakan pompa dengan kapasitas 800 liter/jam, menggunakan motor servo sebagai control valve. Didapatkan hasil sebagai berikut, dengan melakukan bump test dari masing masing sistem kontrol. Dimana pada proses level didapatkan nilai Kp sebesar 16,08852 dan Ki sebesar 0,02722. Untuk proses flow didapatkan nilai Kp sebesar 0,129723 dan nilai Ki sebesar 16,6666667. Hasil rancangan sistem kontrol cascade mendapatkan nilai settling time sebesar 104,725s, delay time 15,329s, time constant 20,54s, tanpa overshoot dan tanpa error steady state.
Untuk mengetahui kejernihan air dengan cara menambahkan sensor TDS (Total Disolved Solid). Set point untuk nilai TDS ditentukan berdasarkan Peraturan Menteri Kesehatan Republik Indonesia Nomor 492 tahun 2010 tentang Standar Kualitas Air Minum menyatakan bahwa nilai maksimum TDS sebesar 500 mg/liter.
Human Machine Interface pada project water treatment menggunakan aplikasi Borland Delphi untuk menampilkan proses aktual yang sedang berlangsung. Pada aplikasi Borland Delphi akan ditampilkan nilai dari set point, process variable, manipulated variable serta juga ditampilkan grafik proses flow dan level.
5. DAFTAR PUSTAKA
[1] C. A. Bayu Pamungkas, A. Triwiyatno, and B. Setiyono, “Pengendalian Ph Air pada Water Treatment Plant System Menggunakan Metode Kontrol PID,” J. Transient, vol. 2, no. 1, pp.
145–151, 2013.
[2] Permenkes No. 492/Th.2010, “Persyaratan Kualitas Air Minum,”
[3] Z. M. Nugraha and A. Musyafa, “Perancangan Kontrol PID untuk Mengatur Tingkat Kejernihan Air pada Sistem Pengolahan Air Bersih Skala Rumah Tangga,” vol. 1, no. 1, pp.
1–6, 2014.
[4] A. Sutanto and H. Tanudjaja, “Penerapan Kontroler PID Pada Sistem Pengatur Ketinggian Air Berbasis Labview,” J. Elektro, vol. 10, no. 2, pp. 1–12, 2017.
[5] R. B. M. Gozali, “Desain Kontrol Pid Dengan Metoda Tuning Direct Synthesis Untuk Pengaturan Kecepatan Motor Dc,” Teknoin, vol. 10, no. 4, pp. 283–293, 2005, doi:
10.20885/teknoin.vol 10.iss4.art 3.
[6] C. Melva, A. Kusnayat, and D. S. E. Atmaja, “Perancangan Sistem Otomatisasi Pengolahan dan Distribusi Air Bersih di Wilayah II Universitas Telkom,” e-Proceeding Eng., vol. 4, no.
2, pp. 2635–2641, 2017.
[7] I. Setiawan, Kontrol PID Untuk Proses Industri. 2008.
[8] F. Gunterus, Sistem Pengendalian Proses. .
[9] C. N. Hamdani, “Perancangan Sistem Kontrol Level Nonlinier Menggunakan Fuzzy-PID Supervision,” INOVTEK - Seri Elektro, vol. 2, no. 1, p. 10, 2020, doi:
10.35314/ise.v2i1.1269.
[10] S. D. Br Pelawi and S. Manan, “Sistem Monitoring Volume Air Menggunakan Sensor Ultrasonik Dan Monitoring Output Volume Air Menggunakan Flow Meter Berbasis Arduino,” Gema Teknologi., vol. 19, no. 2, p. 6, 2017, doi: 10.14710/gt.v19i2.21863.
[11] H. Cahyani, H. Harmadi, and W. Wildian, “Pengembangan Alat Ukur Total Dissolved Solids (TDS) Berbasis Mikrokontroler Dengan Beberapa Variasi Bentuk Sensor Konduktivitas,” J.
Fis. Unand, vol. 5, no. 4, pp. 371–377, 2016, doi: 10.25077/jfu.5.4.371-377.2016.
[12] M. Ali, “Pembelajaran Perancangan Sistem Kontrol PID Dengan Software MatLab,” J.
Edukasi Elektro, vol. 1, no. 1, p. 2, 2004.