LANDASAN TEORI
Pada bagian ini akan diuraikan secara singkat mengenai beberapa teori umum yang digunakan untuk menyelesaikan tugas akhir ini. Dimulai dengan pelinieran model matematik, lalu perumusan suatu persamaan beda hingga, dan diakhiri dengan penggunaan jaringan saraf tiruan pada bidang kontrol.
Pada umumnya model matematik dari suatu sistem dinamik yang kita temui dalam kehidupan sehari-hari akan berbentuk nonlinier. Hal ini mengakibatkan sistem terse-but sulit untuk dianalisis perilakunya, termasuk dalam hal pengontrolan sistemnya. Oleh karena itu, salah satu jalan untuk mempermudah proses analisa dari sistem tersebut adalah dengan melakukan pelinieran model matematik yang diperoleh. Berikut ini akan diuraikan salah satu teknik dalam pelinieran model matematik.
2.1
Pelinieran Model Matematik dengan Ekspansi
Deret Taylor
Untuk memperoleh model matematika yang linier dari suatu sistem nonlinier, kita anggap bahwa variabel hanya mengalami deviasi yang kecil dari titik kerjanya. Teknik linierisasi ini berlaku di daerah yang berdekatan dengan keadaan operasi. Namun, jika keadaan operasi berubah-ubah secara luas, persamaan linierisasi yang
demikian tidak cukup dan persamaan nonlinier harus dikerjakan. Penting sekali un-tuk diingat bahwa model matematika tertentu yang digunakan dalam desain dan analisis dapat menggambarkan dengan tepat dinamika sistem sebenarnya untuk keadaan operasi tertentu, tetapi mungkin tidak tepat untuk keadaan operasi yang lain. Salah satu metode pelinieran ialah metode ekspansi deret Taylor yang akan diuraikan pada penjelasan berikut.
Tinjau sistem yang keluarannya y yang merupakan fungsi dari dua buah masukan x1 dan x2 sedemikian rupa sehingga
y= f (x1, x2). (2.1)
Untuk memperoleh pendekatan linier pada sistem nonlinier ini, kita dapat mengu-raikan persamaan (2.1) menjadi deret Taylor di sekitar titik kerja ¯x1 dan ¯x2 sebagai
berikut y= f (¯x1,x¯2) +h∂x∂f1(x1− ¯x1) + ∂x∂f2(x2− ¯x2) i + 1 2! h ∂2f ∂x2 1(x1− ¯ x1)2+ 2 ∂ 2f ∂x1∂x2(x1− ¯x1)(x2− ¯x2) + ∂2f ∂x2 2(x2− ¯ x2)2 i + ..., (2.2) dengan turunan parsial dihitung pada x1 = ¯x1 dan x2 = ¯x2. Di dekat titik kerja
normal, bentuk orde tinggi dapat diabaikan. Berdasarkan persamaan (2.2), model matematik linier dari persamaan (2.1) disekitar kondisi kerja normal sampai galat orde dua diberikan oleh
y− ¯y= K1(x1− ¯x1) + K2(x2− ¯x2), (2.3)
dengan ¯y= f (¯x1,x¯2), K1 = ∂x∂f1|x1=¯x1,x2=¯x2, dan K2 =
∂f
∂x2|x1=¯x1,x2=¯x2.
2.2
Aproksimasi Persamaan Diferensial
Menggu-nakan Metode Beda Hingga
Tujuan dari metode beda hingga dalam menyelesaikan persamaan diferensial biasa (PDB) atau ODE (Ordinary Differential Equation) ialah mengubah masalah kalku-lus menjadi masalah aljabar dengan jalan:
1. Diskritisasi model fisika yang kontinu.
2. Melakukan aproksimasi turunan eksak dari PDB dengan cara aljabar yakni aprosimaksi beda hingga.
3. Menyubtitusikan hasil (2) pada masalah PDB awal untuk mendapatkan per-samaan beda hingga atau finite diffrerence equation (FDE).
Misalkan y(t) adalah aprosimaksi solusi PDB dan ¯y(t) ialah solusi eksaknya. Tu-runan eksak (¯y0
) dapat diaprosimaksi dengan menggunakan deret Taylor untuk n titik dasar dalam bentuk
¯ yn+1 = ¯yn+ ¯y 0 |n∆t + 1 2y¯ 00 |n∆t2+ .... (2.4)
Persamaan (2.4) dapat ditulis dalam polinom Taylor sebagai berikut ¯ yn+1 = ¯yn+ ¯y 0 |n∆t + 1 2y¯ 00 |n∆t2+ ... + 1 m!y¯ (m)| n∆tm+ Rm+1, (2.5)
dengan bentuk suku sisa Rm+1 diberikan oleh Rm+1 = (m+1)!1 y¯(m+1)(τ )∆tm+1, t ≤
τ ≤ t + ∆t. Jika deret tak hingga Taylor ini dipotong setelah suku ke m untuk men-dapatkan bentuk aproksimasi dari ¯yn+1, maka suku sisa Rm+1 adalah bentuk galat
dari deret Taylor yang sudah dipotong. Pada kebanyakan kasus, kita menginginkan galat ini menuju ke nol.
Penyelesaian untuk persamaan (2.4) dalam bentuk ¯y0
|n ialah ¯ y0 |n = ¯ yn+1− ¯yn ∆t − 1 2y¯ 00 |n∆t − .... (2.6)
Dengan menyamakan persamaan (2.6) dengan (2.5), maka diperoleh ¯ y0 |n= ¯ yn+1− ¯yn ∆t − 1 2y¯ 00 |n∆t − ... − Rm+1 ∆t . (2.7)
Atau dapat ditulis dalam bentuk lain, yaitu ¯ y0 |n = ¯ yn+1− ¯yn ∆t − 1 2y¯ 00 |n∆t − ... − O(∆tm), (2.8)
dengan O(∆tm) adalah galat. Bila deret Taylor (2.8) dipotong setelah ¯y0
|n, maka
persamaan (2.7) dan (2.8) menghasilkan ¯ y0 |n= ¯ yn+1− ¯yn ∆t − 1 2y¯ 00 (τ )∆t. (2.9)
Kemudian, misalkan PDB orde satu ¯y0
= ¯f(t, ¯y) dengan ¯y(t0) = ¯y0. Pilih titik
n sebagai titik dasar, sehingga dengan menyubtitusikan persamaan (2.9) pada ¯y0
diperoleh ¯ yn+1− ¯yn ∆t − 1 2y¯ 00 (τ )∆t = ¯f(tn,y¯n) = ¯fn. (2.10)
Atau dalam bentuk lain dapat ditulis ¯ yn+1 = ¯yn+ ∆t ¯fn+ 1 2y¯ 00 (τ )∆t2 = ¯yn+ ∆t ¯fn+ O(∆t2). (2.11)
Karena kita akan mencari solusi aproksimasi maka suku sisa atau O(∆t2) dapat
diabaikan sehingga kita akan memperoleh solusi untuk PDB diatas dalam bentuk
yn+1 = yn+ ∆tfn. (2.12)
2.3
Jaringan Saraf Tiruan dalam Bidang Kontrol
Jaringan saraf tiruan adalah suatu sistem paralel dari unsur-unsur pemrosesan, yang terhubung oleh suatu topologi graph, yang secara alami memiliki kecenderungan un-tuk menyimpan pengetahuan dan membuatnya dapat digunakan ([7]:2). Metode ini memiliki beberapa keunggulan dalam menyelesaikan masalah tak linier dan memiliki kemampuan beradaptasi yang baik. Hal ini membuat jaringan saraf tiruan dapt di-aplikasikan dalam berbagai bidang seperti kontrol, keuangan, robotika, elektronika, dan telekomunikasi. Pada bagian ini hanya akan dibahas secara singkat mengenai jaringan saraf tiruan dan difokuskan pada aplikasinya pada bidang kontrol. Untuk pengetahuan lebih mendasar mengenai jaringan saraf tiruan, pembaca dapat meli-hat referensi yang ditulis oleh Simon Haykin [7].
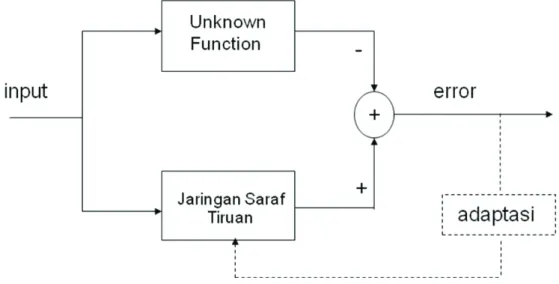
Skema penggunaan jaringan saraf tiruan pada bidang kontrol dapat dilihat pada Gambar 2.1. Pada gambar tersebut, kita memiliki suatu fungsi yang tidak dike-tahui (unknown function) dimana kita ingin mengaproksimasinya. Caranya dengan mengatur parameter dari jaringan saraf tiruan yang dibuat sedemikian sehingga jaringan tersebut dapat menghasilkan respon yang sama dengan fungsi tersebut, bila diberikan input yang sama pada keduanya. Pada aplikasinya, unknown
func-Gambar 2.1: Jaringan Saraf Tiruan sebagai Aproksimator Fungsi
tion berkorespondensi dengan sistem yang ingin kita kontrol. Sementara jaringan saraf tiruan akan menjadi model plant yang diidentifikasi. Respon dari kedua sistem dibandingkan dan apabila timbul galat maka akan dilakukan adaptasi hingga galat tersebut sekecil mungkin.
Neuron merupakan unit yang melakukan pemrosesan data yang terdiri atas tiga bagian dasar yaitu:
1. Synapses atau jaringan penghubung yang karakeristiknya terdapat bobot yang akan dikalikan dengan masukan.
2. Adder atau unit penjumlah yang berfungsi menjumlahkan hasil kali masukan dengan bobotnya.
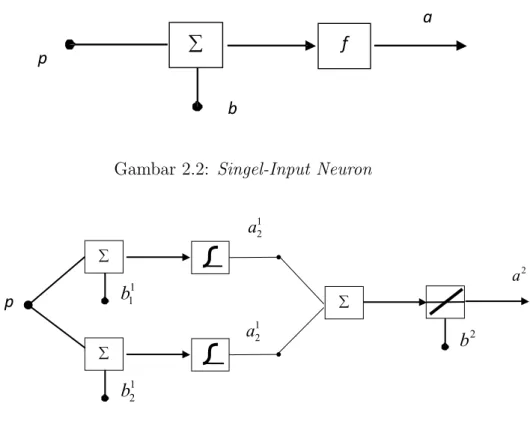
Model neuron yang paling sederhana ialah single-input neuron (Gambar 2.2). Jaringan ini terdiri atas masukan p, bobot w, bias b, a sebagai output, dan f sebagai fungsi transfer. Pada umumnya fungsi transfer yang dipilih berbentuk fungsi sigmoid, seperti log-sigmoid dan tan-sigmoid. Fungsi ini sering digunakan untuk proses lati-han (training) menggunakan algoritma backpropagation, karena fungsi sigmoid ialah terdiferensialkan. Lebih jauh lagi suatu jaringan dapat memiliki banyak masukan, banyak neuron, dan banyak lapisan. Gambar 2.3 memperlihatkan suatu jaringan yang terdiri atas banyak neuron dan banyak lapisan. Jaringan ini terdiri atas dua lapisan, dimana lapisan pertama terdiri atas dua neuron dengan log-sigmoid gai fungsi transfer dan lapisan kedua terdiri atas satu neuron dengan purelin seba-gai fungsi transfernya. Jaringan seperti Gambar 2.3 ini sering digunakan sebaseba-gai aproksimator fungsi.
f
b p aå
Gambar 2.2: Singel-Input Neuron
p å å 1 1
b
1 2b
1 2 a 1 2 a å 2b
2 aGambar 2.3: Contoh Jaringan dengan Dua Lapisan
Permasalahan selanjutnya agar suatu jaringan dapat berfungsi dengan baik se-bagai aproksimator fungsi ialah pemilihan bobot dan bias yang tepat. Proses ini
dinamakan training. Pada tugas akhir ini proses training dilakukan menggunakan metode backpropagation dengan algoritma Levenberg-Marquardt.