TUGAS TEKNIK PERMESINAN KAPAL III
PAPER
“ STEERING GEAR “
Disusun Oleh:
RIDHA ADLIN
NRP: 4208100008
JODI WEGIG
NRP: 4208100087
BISMAR ABI FAISAL
NRP: 4210000021
JURUSAN TEKNIK SISTEM PERKAPALAN
FAKULTAS TEKNOLOGI KELAUTAN
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
2012
STEERING GEAR
I. STEERING GEAR
Steering gear merupakan suatu alat yang berfungsi untuk bisa menggerakkan daun kemudi kapal(rudder) agar kapal bisa berbelok atau bermanuver. Steering gear bisa bergerak karena mendapat signal dari deck navigasi. Sistem pada sterring gear bisa terdapat banyak komponen, tetap pada intinya sistem steering gear terdiri dari tiga buah sistem utama. Ketiga sistem tersebut antara lain :
- Sistem control equipment
sistem yang berfungsi untuk mengontrol kerja dari setiap komponen pada steering gear.
- Sistem power unit
sistem yang menyediakan tenaga agar steering gear mampu dijalankan. - Sistem sistem transmisi kemudi
Suatu sistem transmisi dari kemudi kapal pada deck navigasi ke steering gear agar daun kemudi bisa digerakkan.
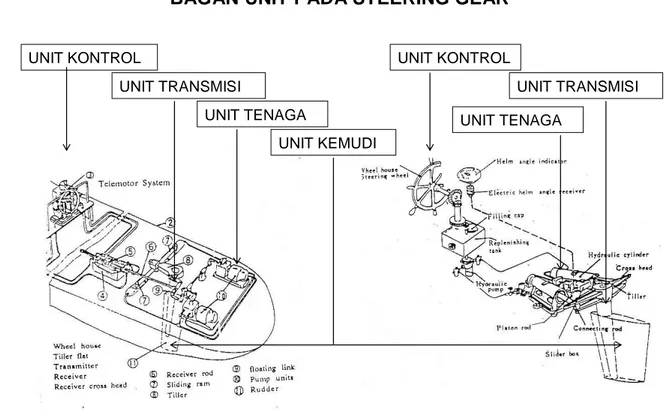
Gambar 1.1 Pembagian Unit pada Steering Gear
Peralatan kendali mengirimkan suatu isyarat pada mesin steering gear. Isyarat yang dikirimkan adalah berupa besaran sudut putar dari daun kemudi dan ke arah mana daun kemudi berputar. Isyarat tersebut dikirim melalui kabel penghubung dan isyarat tersebut akan mengaktifkan komponen yaitu sistem transmisi dan power unit pada
BAGAN UNIT PADA STEERING GEAR
UNIT KONTROL UNIT TENAGA UNIT TRANSMISI UNIT KONTROL UNIT KEMUDI UNIT TRANSMISI UNIT TENAGA
steering gear untuk bekerja. Sistem-sistem tersebut akan bekerja sampai penjuru sudut putar dari daun kemudi telah dicapai.
Kebutuhan peralatan pada steering gear sangatlah penting dipenuhi karena alat-alat tersebut bekerja saling berhubungan. Power unit pada steering gear harus disediakan sebnyak dua buah. Dimana power unit kedua tersebut berfungsi sebagai emergency(cadangan). Apabila power unit pertama mengalami problem atau kerusakan. Gaya dan kemampuan torsi harus bisa dipenuhi. Contohnya seperti kemudi harus dapat diayunkan dari sudut sebesar 35o pada satu sisi menuju ke sisi lainnya sebesar 30o selama kurang lebih 28 detik. Sistem kemudi harus dilindungi dari getaran dan beban, selain itu pipa-pipa yang dipakai harus menggunakan material yang telah disetujui. Sistem kendali dari steering gear harus disiapkan dalam bentuk kompartemen steering gear.
Kapal tanker dengan gross ton sebesar 10000 ke atas, harus mempunyai dua sistem steering gear yang bisa dikendalikan dari deck navigasi. Dimana apabila steering gear pertama dalam keadaan rusak atau mendapatkan problem, bisa digantikan dengan steering gear yang kedua. Dan pemindahan dari steering gear satu dan dua harus bisa dilakukan dengan segera dari posisi deck navigasi. Kedua steering gear itu sendiri harus bisa berfungsi sendiri-sendiri, dan apabila yang satu gagal maka pemindahan penggunaan pada steering gear yang kedua harus bisa dilakukan dalam + 45 detik. Problem-problem yang terjadi pada steering gear harus bisa di ketahui dengan cara memasang alarm. Jadi apabila terdapat kegagalan pada satu stering gear maka alarm tersebut akan berbunyi dan dapat didengar pada deck navigasi.
Steering gear harus bisa dikendalikan dengan peralatan kendali hidrolik, yang dikenal dengan nama “telemotor” atau bisa juga dikendalkan oleh peralatan kendali elektrik atau kelistrikan. Tenaga penggerak juga bisa dioperasikan bergiliran dengan tenaga hidrolik atau elektrik. Dalam memilih masing- masing sistem pengoperasian tersebut harus dengan pertimbangan, untuk pertama kali sebaiknya mempertimbangkan penggunaan sistem operasi dengan peralatan kendali hidrolik. Pompa hidrolik yang disyaratkan pada sistem kendali hidrolik adalah pompa yang dapat melakukan pemompaan fluida dengan seketika dalam rangka untuk menyediakan gaya hidrolik untuk menggerakkan daun kemudi (rudder). Respon sekejap tidak diijinkan pada saat pompa dalam keadaan pertama dinyalakan, oleh karena itu diperlukan pompa yang digunakan dalam keadaan operasi tetap (constant running) yang hanya digunakan untuk memompa fluida. Dan variabel pump delivery menyediakan fasilitas ini.
II. VARIABLE DELIVERY PUMPS
Terdapat beberapa rancangan pompa yang berbeda untuk variable pump delivery pada saat ini. Masing- masing design mempunyai maksud untuk mengubah langkah pompa. Sehingga, dengan demikian jumlah perpindahan minyak akan berubah dari nol ke beberapa design nilai maksimum yang dirancang. Ini bisa dicapai dengan penggunaan floating ring, swash plate atau slipper pad.
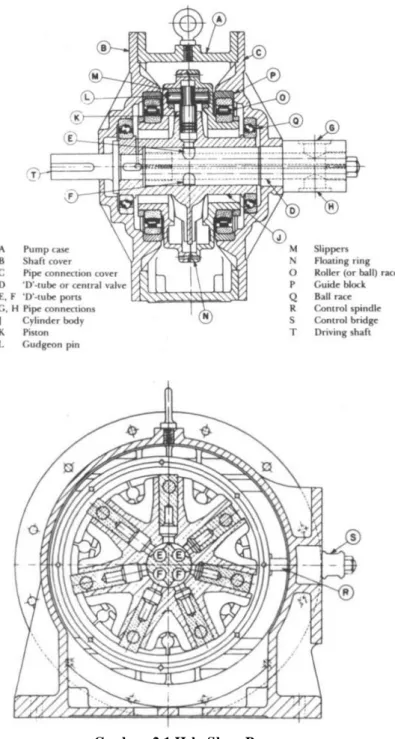
Pompa silinder radial (Hele-shaw) ditunjukkan pada gambar 2.1. Dengan casing yang pendek dari panjang poros yang mengendalikan badan silinder yang berputar disekitar sentral valve atau tabung dan pada akhirnya akan disupport oleh bantalan peluru(ball bearings). Badan cylinder dihubungkan pada central valve dengan ports yang
mendorong ke arah koneksi di luar casing pompa untuk mensuplai dan mengirim minyak. Sejumlah piston cocok bila dipasang pada pompa dengan radial cylinder dan diikatkan pada slippers oleh pin yang disebut gudgeon pin. Slippers cocok dimasukkan ke dalam track yang ada di dalam lingkar floating ring. Floating ring dapat berputar dan d i support oleh suatu batalan peluru (ball bearings). Dan juga dapat bergerak dari sisi ke sisi saat bearing naik sampai guide block. Dua spindles yang berjalan di luar casing pompa mengendalikan bergeraknya floting ring tersebut. Berikut adalah bagian-bagian pada variable pump delivery.
Gambar 2.1 Hele Shaw Pump
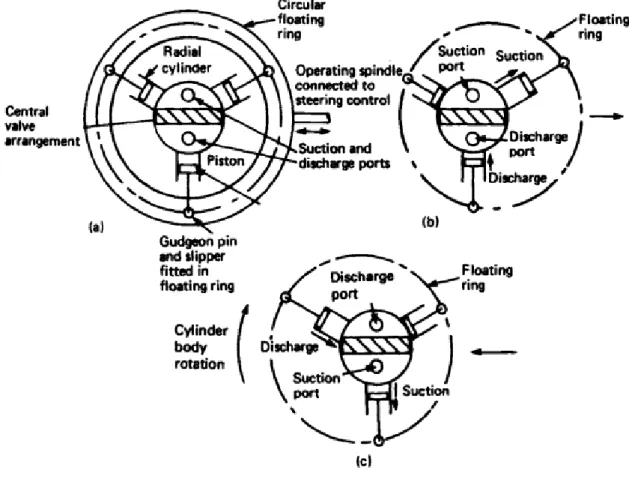
Prinsip operasi dari pompa ini akan diuraikan mengacu pada gambar 2.2. Ketika lingkaran floating ring konsentris dengan central valve yang dimiliki piston dan tidak
punya gerak bolak-balik relatif di dalam silinder, seperti gambar 2.2 (a). Sebagai hasilnya, tidak ada oli yang dipompa. Dan meskipun pompa berputar, tidak ada cairan apapun yang dialirkan. Hal sebaliknya akan terjadi apabila floating ring ditarik ke sebelah kanan dan gerakan bolak-balik piston pada cylinder terjadi(gambar 2.2 b). Piston yang lebih rendah, misalnya, ketika piston berpindah gerak ke arah dalam maka akan mengeluarkan cairan fluida sampai pada port terendah di dalam central valve. Ketika selanjutnya piston berpindah pada posisi horizontal, piston berpindah gerak keluar dan menyeret masuk cairan fluida dari port atas. Sesekali ketika posisi piston horisontal pada sisi berlawanan, akan mulai mengeluarkan cairan fluida tersebut. Jika lingkaran floating ring telah didorong ke arah kiri lalu kemudian sisi hisap dan discharge port akan dikembalikan ke posisi semula (gambar 2.2 c).
Oleh karena itu pemasangan pompa ini disediakan, untuk sebagai unit yang tetap berputar, pada kondisi tidak ada arus dan variabel delivery yang tidak terbatas di dalam arah manapun. Pompa ini juga sebagai unit perpindahan positif. Di mana dua pompa di pasang dalam sistem ini, dan yang digunakan hanya satu dan satunya lagi sebagai emergency. Gigi pengunci Non-reversing disediakan sebagai peralatan dari flexible kopling dan beroperasi secara otomatis. Ketika pompa berhenti, gear pengunci akan masuk ke dalam dan ketika pompa dinyalakan gigi pengunci dilepaskan.
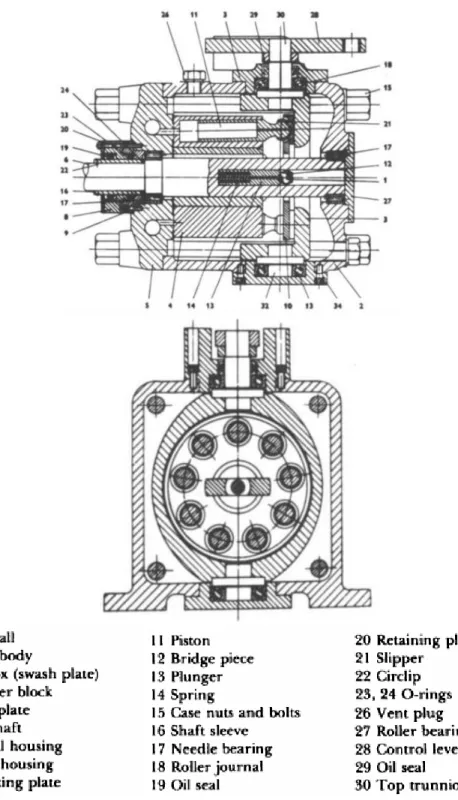
Gambar 2.3 Swash Plate pump
Swash plate dan design bantalan slippers keduanya untuk pompa silinder axial. Bantalan slipper di letakkan di atas swash plate yang menyediakan tekanan tinggi. Dan pemasangan pompa swash plate diperlihatkan pada gambar 2.3. Poros penggerak memutar silinder barrel, swash plate dan piston. Cembung putar yang ada di luar(poros pendek) memungkinkan swash plate menggerakkan porosnya. Silinder di dalam barrel disambung ke port yang meluas di suatu busur di sekitar poer plate yang dipasang fix.
Ketika swash plate vertikal tidak ada pemompaan yang yang berlangsung. Ketika swash plate dimiringkan pemompaan terjadi, panjang stroke tergantung atas sudut
kemiringan. Ketergantungan atas arah memiringkan ports akan memperbaiki penghisapan atau pengeluaran. Oleh karena itu pemasangan pompa ini akan menawarkan fleksibilitas yang sama dengan jenis piston radial.
III. TELEMOTOR CONTROL
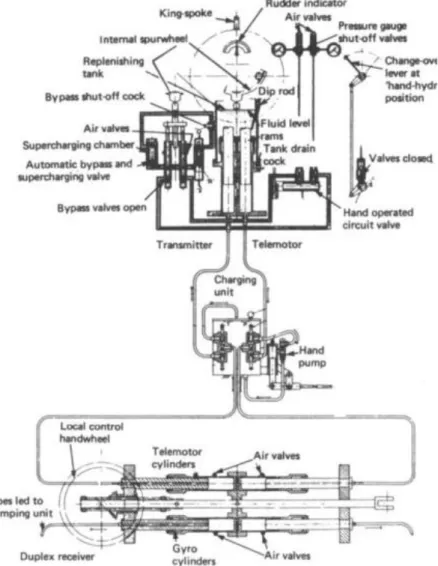
Telemotor control adalah suatu sistem kendali hidrolik yang menggunakan alat pemancar, penerima, pipa dan unit pengisian. Alat pemancar, yang dipasang pada steering wheel system, ditempatkan di deck navigasi dan alat penerima di pasang di atas steering gear. Unit pengisi berada di dekat alat penerima dan system diisi dengan fluida yang tidak membeku.
Gambar 3.1 Telemotor control system
Telemotor system ditunjukkan oleh gambar 2.4. Dua rams hadir di dalam pemancar yang bergerak ke arah berlawanan ketika steering wheel di putar. Cairan kemudian di pompa ke bawah pipa satu saluran dan di seret masuk dari arah lain. Cairan yang dipompa disalurkan melalui pipa ke penerima(receiver) dan memaksa silinder telemotor untuk bergerak. Penghisapan fluida dari silinder sebaliknya memungkinkan berlangsungnya pergerakan ini. Unit silinder mempunyai suatu poros pembalik yang dihubungkan oleh suatu pin. Poros pembalik ini mengoperasikan slippers ring dan swash
plate dari variable delivery pump. Jika pin dihilangkan dari unit silinder dan disisipi local hand wheel drive yang dikendalikan manual steering gear mungkin terjadi. Alat penghenti di pasang di penerima (receiver) untuk membatasi pergerakan menuju ke sudut kemudi maksimum yang di syaratkan. Unit pengisian yang terdiri dari tangki, pompa, dan keran tutup untuk masing- masing dan di pasang di pipa utama antara pemancar (transmitter) dan penerima (receiver).
Pemancar di dalam tangki pengisi dikelilingi rams. Memastikan udara tidak masuk ke dalam sistem. Sistem bypass di antara dua silinder terbuka ketika kemudi melewati midship. Juga pada posisi di tengah unit supercharging menyediakan suatu tekanan di dalam sistem yang memastikan respon yang cepat pada system untuk menggerakkan kemudi. Supercharging unit juga menyeret masuk cairan pengisi jika diperlukan di dalam system dan dipasanglah relief valve jika tekanan terlalu tinggi. Pressure gauge dihubungkan untuk masing- masing saluran pipa dan air vent cocks juga disediakan.
Pada operasi normal, tekanan kerja sekitar 20-30 bar, atau dari maker memberi figur sendiri. Dan persyaratan tekanan kerja tersebut harus tidak boleh terlewati. Kemudi harus tidak boleh dipaksa diluar ketegangan maksimum dari roda gigi tersebut. Tangki pengisian harus di cek secara teratrur dan beberapa pelumasan juga perlu menjadi perhatian. Kebocoran atau kerusakan peralatan harus diperbaiki dan diganti secepat mungkin. Sistem harus dicek secara teratur untuk menjaga kekuatan tekanannya. Daun kemudi yang menjawab respon dari pergerakan sterring wheel di navigation deck juga harus di cek, apabila responnya sudah tidak baik dan terlalu lambat maka pekerjaan pelepasan udara yang masuk ke sistem harus dilakukan. Jika setelah service yang lama, udara yang dikeluarkan tetap tidak bisa memperbaiki respon dari daun kemudi, mungkin diperlukan untuk mengisi kembali sistem tersebut dengan cairan fluida yang baru.
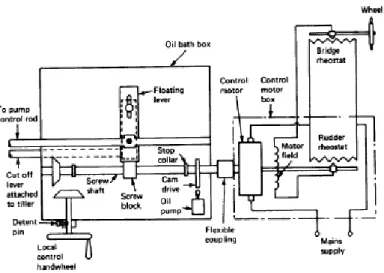
IV. KONTROL ELEKTRONIK
Sistem kontrol elektrik jarak jauh umumnya digunakan dalam instalasi modern karena menggunakan unit kontrol kecil sebagai pemancar di anjungan serta lebih sederhana dan dapat diandalkan dalam pengoperasiannya. Gerakan hasil sinyal dari anjungan akibat ketidakseimbangan listrik dan aliran arus pada motor. Motor penggerak, melalui kopling fleksibel, poros sekrup, menyebabkan kontrol berputar. Sebuah blok putar pada poros tersebut akan dipindahkan dan kemudian tuas bergerak mengambang pada suatu batang kendali yang terpasang. Sebuah cut-off tuas terhubung pada pasak kemudi yang bergerak akan membawa pivot tuas mengambang dan tuas ke garis pada sudut kanan terhadap sumbu poros kemudi. Pada titik ini sudut kemudi akan cocok sudut tuas anjungan dan tindakan pemompaan akan berhenti. Poros screw berputar akan memiliki mengoreksi ketidakseimbangan listrik dan motor akan berhenti. Untuk kontrol manual, electrical control dimatikan dan handwheel kecil dihubungkan ke poros sekrup. Rotasi handwheel akan memindahkan tuas mengambang dan memberikan gerakan kemudi.
Gambar 4.1 Unit kontrol elektrik
Ada dua jenis pembangkit tenaga yang digunakan untuk menggerakan steering gear, yaitu : 1) Hand driven steering gear
Jenis steering gear ini digerakkan dengan menggunakan tenaga manusia (digerakan secara manual), yaitu dengan memutar pompa hidrolik secara manual.
2) Steam driven steering gear
Jenis steering gear ini digerakkan oleh tenaga uap. Jenis ini digunakan pada kapal-kapal yang menggunakan tenaga uap dalam permesinannya. Mesin uap ini sekarang sudah jarang digunakan.
3) Electric steering gear
Jenis steering gear ini digerakkan dengan tenaga listrik. Penggerak ini menggunakan motor elektrik untuk menggerakan rudder. Motor elektrik juga digunakan untuk menggerakan pompa hidrolik.
4) Hydraulic steering gear
Jenis steering gear ini menggunakan sistem hidrolis. Fluida hidrolis ini disirkulasikan oleh pompa hirolis yang digerakan dengan motor elektrik. Tenaga yang dihasilkan oleh
Ada beberapa macam penggerak rudder stock yang ada saat ini. Sistem penggerak rudder stock (tongkat kemudi) dibagi menjadi 2 jenis, yaitu :
1) Jenis Ram
Keterangan gambar 1) Rudder stock
2) Tiller
3) Ram (piston dan silinder) 4) Hydraulic Lines
5) Electro-motor 6) Pelindung kopling 7) Pompa
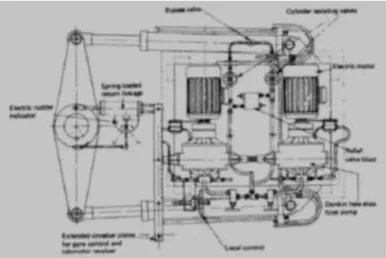
Ram bertindak sebagai silinder hidrolik yang mengoperasikan pasak kemudi dalam pencabangan dari ram. Sebuah pompa pengirim variabel yang dipasang di setiap silinder dan bantalan cincin dihubungkan oleh batang ke sumbu kendali penerima telemotor. Pompa pengiriman variabel disalurkan kepada masing- masing silinder untuk mengaktifkan penghisap atau debit dari keduanya. Sebuah tangki pengisi dipasang di dekatnya dan diatur dengan katup isap non-return yang secara otomatis menyediakan cairan ke pompa. Sebuah katup bypass dikombinasikan dengan katup shock spring-loaded yang terbuka dari dalam sehingga memaksa kemudi naik ke atas. Dalam bergerak atas, pompa yang digerakkan dan perangkat kemudi kemudi akan kembali ke posisi. Selama pengoperasian normal satu pompa akan berjalan. Silinder penerima telemotor kemudian akan berpindah: ini akan menghasilkan suatu gerakan tuas mengambang yang akan memindahkan cincin mengambang atau pad sepatu pompa, menyebabkan tindakan pemompaan. Ca iran akan diambil dari satu silinder dan dipompa ke yang lain, sehingga memutar kemudi.
Gambar 4.3 Steering gear tipe two - ram
Gambar 4.4 Steering gear tipe four – ram
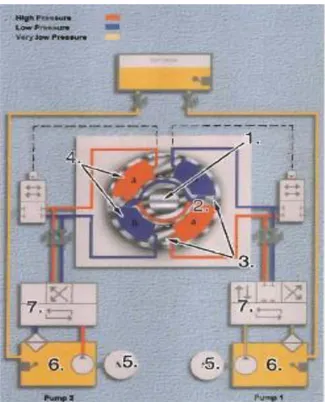
2) Steering Gear tipe vane
Pada steering gear tipe vane yang digerakan oleh pompa hidrolik, di dalam rumahan vane terdapat 2 baling-baling yang saling berhimpitan. Rumahan tersebut dibagi menjadi 4 bagian, 2 bagian untuk bertekanan tinggi dan dua bagian untuk bertekanan rendah. Ada suatu katup yang mengatur minyak hidrolik pada bagian yang
bertekanan tinggi agar minyak hidrolik masuk ke dalam ruangan secara serentak, kemudian memutar vane dan tongkat kemudi akan berputar. Jika rudder akan berputar pada arah yang berlawanan atau kemba li ke posisi semula, maka bagian yang bertekanan tinggi akan menjadi bertekanan rendah sehingga baling-baling akan berputar ke arah yang bertekanan lebih rendah.
Gambar 4.5 Mekanisme kerja steering gear tipe vane
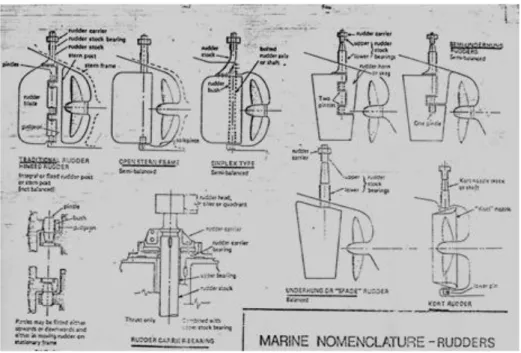
V. PEMBAGIAN DAN JENIS KEMUDI
1) Dilihat dari konstruksi plat penyusunnya :
- Kemudi plat tunggal
Daun kemudi terbuat dari satu plat yang diberi penguat. Kemudi jenis ini sudah tidak digunakan lagi karena memiliki kekuatan yang sa ngat kecil, sehingga kemudi jenis ini sudah tidak digunakan lagi untuk kapal – kapal berukuran besar.
- Kemudi plat ganda
Daun kemudi yang terbuat dari dua plat dengan penguatan didalamnya sehingga dalam tipe kemudi ini akan terbentuk suatu rongga-rongga. Dengan adanya dua lapisan plat pada daun kemudi ini maka akan memungkinkan daunkemudi tersebut memiliki tingkat kekuatan yang lebih dibandingkan pada tipe kemudi dengan plat tunggal.
2) Dilihat dari peletakannya :
- Kemudi meletak
Adalah peletakan daun kemudi yang diletakkan pada solepiece / sepatu kemudi pada linggi kapal.
- Kemudi menggantung
Peletakan daun kemudi yang secara keseluruhan menggantung pada badan kapal dan tanpa penyangga.
- Kemidi setengah menggantung (semi menggantung)
Adalah peletakan daun kemud i dengan separuh bagian daun kemudi yang menggantung pada rudder horn.
Gambar . 5.1 Kemudi Berdasarkan Letaknya.
3) Dipandang dari pembagian luas daun kemudi terhadap sumbu tongkat kemudi
- Kemudi tidak balans / unbalance rudder
Adalah kemudi yang seluruh luas daunnya terletak dibelakang sumbu kemudi.
- Kemudi setengah balans / semi- balanced rudder
Adalah jenis daun kemudi yang sebagian besar luas daun berada dibelakang sumbu tongkat kemudi.
- Kemudi balans / balanced rudder
Adalah jenis daun kemudi yang luas daun nya dibelakang dan didepan hampir sama besarnya (balanced)
Kemudi adalah bagian kapal yang memegang peran sangat penting dalam pelayaran sebuah kapal. Bahkan ikut menentukan faktor keselamatan sebuah kapal. Sehubungan dengan peranan kemudi tersebut, SOLAS ’74 melalui Peraturan 29 Bagian B, BAB II -1 mengenai Perangkat kemudi (Resolusi A.210 (VII)) menyebutkan sebagai berikut :
1) Bagi kapal penumpang dan kapal barang
Kapal-kapal harus dilengkapi dengan perangkat kemudi induk (utama) dan perangkat kemudi bantu yang memenuhi persyaratan yang ditetapkan oleh Pemerintah.
Perangkat kemudi utama harus berkekuatan yang layak dan cukup untuk mengemudikan kapal pada kecepatan ekonomis maksimum, demikian untuk dipergunakan mengemudikan kapal mundur tidak mengalami kerusakan.
Perangkat kemudi bantu harus mempunyai kekuatan yang layak dan cukup untuk mengemudikan kapal dan dapat dipakai segera dalam keadaan darurat.
Kedudukan kemudi yang tepat pada kapal tenaga harus terlihat distasiun pengemudi utama (kamar kemudi anjungan).
2) Hanya bagi kapal penumpang
Perangkat kemudi induk harus mampu memutar daun kemudi dari kedudukan 35º di satu sisi sampai kedudukan 35º disisi lain dalam waktu 28 detik selagi kapal berjalan maju dengan kecepatan ekonomis maksimum.
Perangkat kemudi bantu dapat digerakan dengan tenaga dimana Pemerintah mensyaratkan bahwa garis tengah poros kemudi pada posisi celaga berukuran lebih 9” (228,6 mm).
Sarana yang memenuhi syarat-syarat yang ditetapkan oleh Pemerintah harus dilengkapkan untuk memungkinkan penyampaian aba-aba dari anjungan kestasiun pengemudian pengganti.
3) Hanya untuk kapal barang
Perangkat kemudi bantu harus digerakan dengan tenaga dimana Pemerintah mensyaratkan bahwa garis tengah poros kemudi pada posisi celaga berukuran lebih dari 14” (355 mm).
Penataan kemudi ikut menentukan faktor keselamatan kapal sehingga memenuhi persyaratan yang ditentukan oleh SOLAS (Safety of Life at Sea) yaitu :
1) Dengan mesin kecepatan penuh waktu mengubah kedudukan kemudi cikar kiri dan kanan atau sebaliknya harus tidak lebih dari 28º.
2) Kapal harus dilengkapi dengan penataan kemudi darurat, dan waktu yang diperlukan untuk mengubah kedudukan dari 20º kanan ke 20º kiri atau sebaliknya, tidak lebih dari 60 detik, dengan kecepatan mesin setengah atau minimal 7 knots,