11 BAB III
PERANCANGAN SISTEM
Pada bab ini, akan dijelaskan tentang perancangan perangkat keras dan perangkat lunak sistem yang dibuat.
3.1. Gambaran Sistem
Sistem yang dibuat untuk tugas akhir ini adalah sistem ultrasonic anemometers yang menggunakan mikrokontroler Arduino mega 2560 sebagai tempat untuk melakukan semua proses pengukuran dan perhitungan dilakukan. Sistem ini akan mengukur keadaan lingkungan berupa suhu dan kelembaban, arah mata angin, time of flight (tof) secara real-time, sehingga diharapkan dapat menentukan kecepatan angin dan sumber arah datang angin secara cepat, akurat ,dan ideal.
12
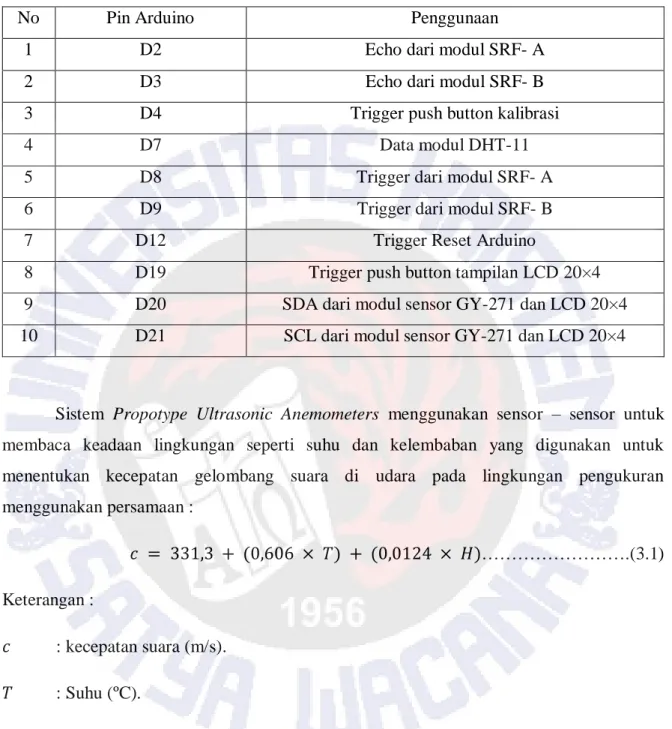
Tabel 3.1 Penggunaan Pin Arduino
Sistem Propotype Ultrasonic Anemometers menggunakan sensor – sensor untuk membaca keadaan lingkungan seperti suhu dan kelembaban yang digunakan untuk menentukan kecepatan gelombang suara di udara pada lingkungan pengukuran menggunakan persamaan : 𝑐 = 331,3 + (0,606 × 𝑇) + (0,0124 × 𝐻)……….(3.1) Keterangan : 𝑐 : kecepatan suara (m/s). 𝑇 : Suhu (ºC). 𝐻 : Kelembaban Relatif (%).
Sensor arah mata angin digunakan untuk menentukan posisi alat terhadap arah mata angin sebagai kalibrasi alat untuk menentukan sudut sumber datang angin.
Catu daya yang digunakan pada tugas akhir ini menggunakan Baterai Lipo 3s (3 cells) 11,1V sehingga alat dapat bersifat portable dan UBEC(Ultimate Battery Eliminator Circuit)
No Pin Arduino Penggunaan
1 D2 Echo dari modul SRF- A
2 D3 Echo dari modul SRF- B
3 D4 Trigger push button kalibrasi
4 D7 Data modul DHT-11
5 D8 Trigger dari modul SRF- A
6 D9 Trigger dari modul SRF- B
7 D12 Trigger Reset Arduino
8 D19 Trigger push button tampilan LCD 20×4
9 D20 SDA dari modul sensor GY-271 dan LCD 20×4
13
module digunakan sebagai penurun tegangan menjadi 6V kemudian diteruskan ke input power Arduino Mega 2560.
3.2. Perancangan Perangkat Keras
3.2.1. Desain Kerangka Alat UltrasonicAnemometers
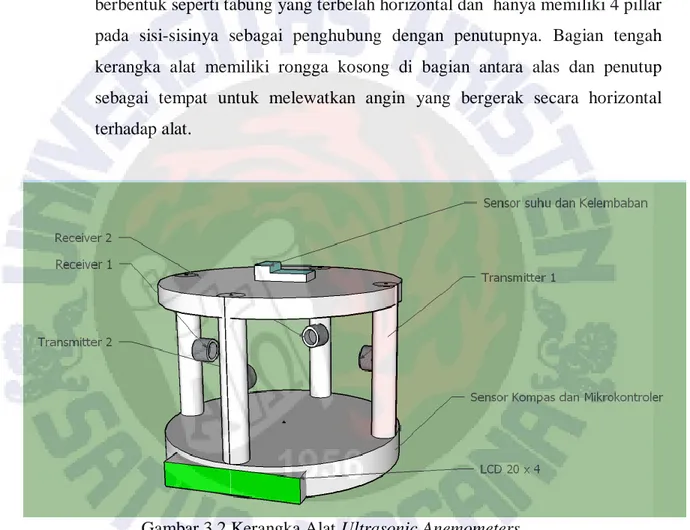
Desain Kerangka Alat Ultrasonic Anemometers yang dibuat berbentuk seperti tabung yang terbelah horizontal dan hanya memiliki 4 pillar pada sisi-sisinya sebagai penghubung dengan penutupnya. Bagian tengah kerangka alat memiliki rongga kosong di bagian antara alas dan penutup sebagai tempat untuk melewatkan angin yang bergerak secara horizontal terhadap alat.
Gambar 3.2 Kerangka Alat Ultrasonic Anemometers
Pada alat yang dibuat Sensor suhu dan kelembaban diletakkan pada bagian luar agar dapat membaca keadaan lingkungan dengan baik, sedangkan sensor kompas diletakkan pada bagian dalam bawah alat. Jarak antar transduser yang dibuat sebesar 300 mm. Berikut contoh perhitungan resolusi yang dihasilkan :
14
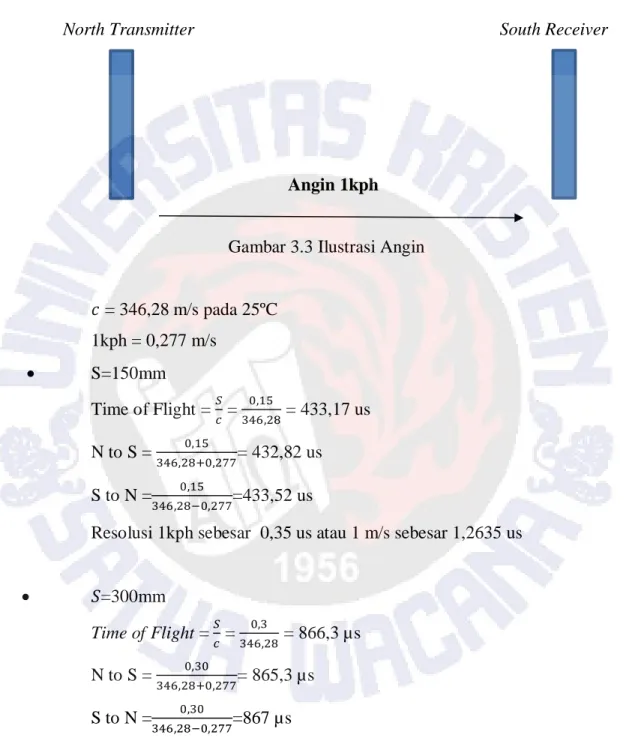
North Transmitter South Receiver
Angin 1kph
Gambar 3.3 Ilustrasi Angin
𝑐 = 346,28 m/s pada 25ºC 1kph = 0,277 m/s S=150mm Time of Flight = 𝑆 𝑐 = 0,15 346,28 = 433,17 us N to S = 0,15 346,28+0,277= 432,82 us S to N = 0,15 346,28−0,277=433,52 us
Resolusi 1kph sebesar 0,35 us atau 1 m/s sebesar 1,2635 us
𝑆=300mm Time of Flight = 𝑆 𝑐 = 0,3 346,28 = 866,3 µs N to S = 0,30 346,28+0,277= 865,3 µs S to N = 0,30 346,28−0,277=867 µs
15
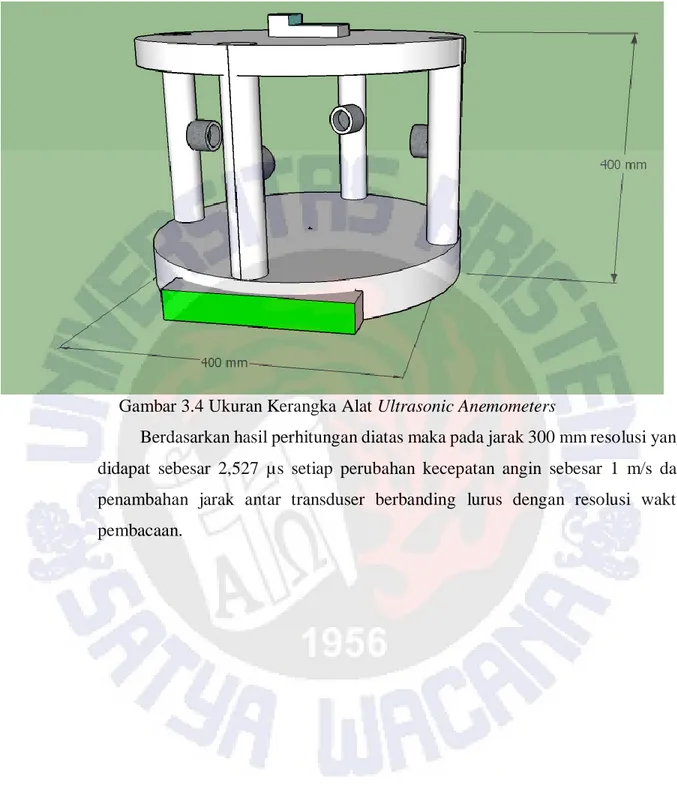
Gambar 3.4 Ukuran Kerangka Alat Ultrasonic Anemometers
Berdasarkan hasil perhitungan diatas maka pada jarak 300 mm resolusi yang didapat sebesar 2,527 µs setiap perubahan kecepatan angin sebesar 1 m/s dan penambahan jarak antar transduser berbanding lurus dengan resolusi waktu pembacaan.
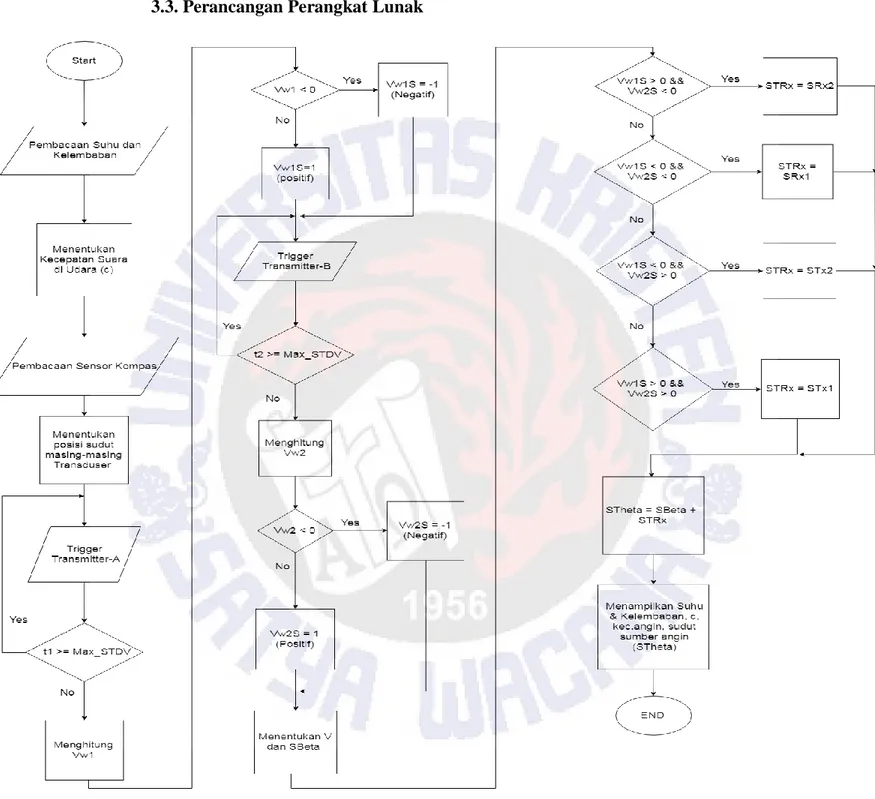
16 3.3. Perancangan Perangkat Lunak
17
Pengukuran kecepatan angin dan menentukan sudut sumber arah angin memerlukan beberapa tahap berupa membaca keadaan lingkungan seperti suhu, kelembaban, dan arah mata angin.
3.3.1. Proses Pembacaan Keadaan Lingkungan
Proses yang dilakukan pertama adalah mengukur suhu dan kelembaban lingkungan yang akan digunakan untuk mengukur kecepatan gelombang suara pada saat itu menggunakan Persamaan 3.1. Proses yang dilakukan selanjutnya yaitu menentukan posisi alat terhadap arah mata angin menggunakan sensor kompas dan kemudian akan diketahui posisi derajat masing-masing transduser.
3.3.2. Proses Pembacaan dan Perhitungan Kecepatan Angin Satu Sumbu Setelah melakukan pembacaan keadaan lingkungan berupa suhu, kelembaban, dan arah mata angin, maka transmitter-A akan mendapat trigger kemudian sinyal yang dipancarkan akan diterima oleh receiver-A dan dibaca waktunya sehingga dapat diketahui nilai 𝑉𝑤1 menggunakan Persamaan (2.2). Demikian juga hal yang dilakukan pada transmitter-B secara bergantian dengan transmitter-A dan akan diketahui nilai 𝑉𝑤2.
3.3.3. Proses Perhitungan Kecepatan Angin Terhadap Dua Sumbu
Pada perancangan alat prototype ultrasonic anemometers menggunakan dua buah sensor jarak (SRF-04) yang akan memancarkan sinyal gelombang ultrasonik secara bergantian untuk mengukur kecepatan angin dari timur ke barat sebaliknya dan selatan ke utara sebaliknya (vertical dan horizontal terhadap arah mata angin). Untuk mengetahui kecepatan angin terhadap dua sumbu maka dilakukan perhitungan menggunakan persamaan vektor resultan terhadap dua kecepatan angin yang telah dibaca dan dihitung (𝑉𝑤1 dan 𝑉𝑤2).
18
𝑉 = √𝑉𝑤12+ 𝑉𝑤22+ 2 × 𝑉𝑤1× 𝑉𝑤2× 𝑐𝑜𝑠 ∝ Karena sudut kedua sumbu selalu tegak lurus maka :
𝑉 = √𝑉𝑤12+ 𝑉𝑤22………(3.2) 𝑉𝑤1 = kecepatan angin hasil perhitungan terhadap transmitter 1 dan
receiver 1 (m/s).
𝑉𝑤2 = kecepatan angin hasil perhitungan terhadap transmitter 2 dan receiver 2 (m/s).
𝑉 = kecepatan angin (m/s)
∝ = sudut antara 𝑉𝑤1 dan 𝑉𝑤2 (90°)
3.3.4. Proses Menentukan Sudut Sumber Arah Angin
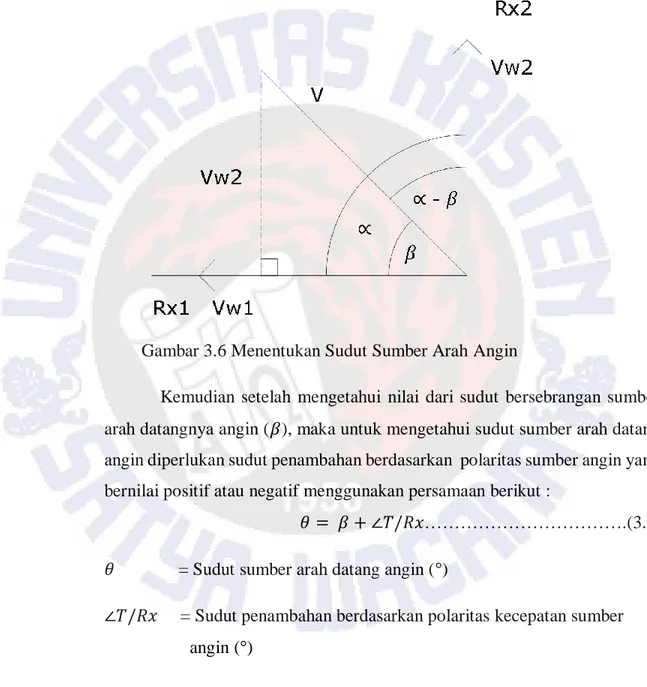
Setelah mengetahui nilai dari V, 𝑉𝑤1 ,dan 𝑉𝑤2 menggunakan Persamaan (3.2) dan (2.2) maka dapat ditentukan sudut bersebrangan sumber arah datangnya angin (𝛽) menggunakan persamaan vektor yang saling tegak lurus:
sin 𝛽 =𝑉𝑤2 𝑉 𝛽 = 𝑠𝑖𝑛−1 𝑉𝑤2
𝑉 ………(3.3)
19
Gambar 3.6 Menentukan Sudut Sumber Arah Angin
Kemudian setelah mengetahui nilai dari sudut bersebrangan sumber arah datangnya angin (𝛽), maka untuk mengetahui sudut sumber arah datang angin diperlukan sudut penambahan berdasarkan polaritas sumber angin yang bernilai positif atau negatif menggunakan persamaan berikut :
𝜃 = 𝛽 + ∠𝑇/𝑅𝑥……….(3.4) 𝜃 = Sudut sumber arah datang angin (°)
∠𝑇/𝑅𝑥 = Sudut penambahan berdasarkan polaritas kecepatan sumber angin (°)
20
Gambar 3.7 Sumber Datang Angin dari Kuadran IV
Maka untuk menentukan sudut penambahannya menggunakan metode kuadran terhadap sumber datangnya angin. Dengan mengetahui sifat dari kecepatan angin terhadap gelombang ultrasonik :
𝑉𝑤1 Positif, jika arah angin searah dengan sinyal yang dipancarkan dari 𝑇𝑥1 ke 𝑅𝑥1.
𝑉𝑤1 Negatif, jika arah angin berlawanan dengan sinyal yang dipancarkan dari 𝑇𝑥1 ke 𝑅𝑥1.
𝑉𝑤2 Positif, Jika arah angin searah dengan sinyal yang dipancarkan dari 𝑇𝑥2 ke 𝑅𝑥2.
21
𝑉𝑤2 Negatif, Jika arah angin Berlawanan dengan sinyal yang dipancarkan dari 𝑇𝑥2ke 𝑅𝑥2.
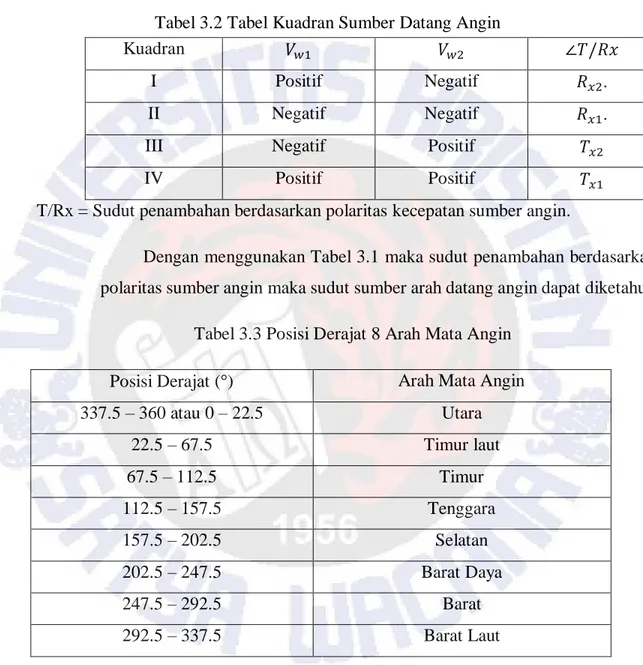
Tabel 3.2 Tabel Kuadran Sumber Datang Angin
T/Rx = Sudut penambahan berdasarkan polaritas kecepatan sumber angin.
Dengan menggunakan Tabel 3.1 maka sudut penambahan berdasarkan polaritas sumber angin maka sudut sumber arah datang angin dapat diketahui.
Tabel 3.3 Posisi Derajat 8 Arah Mata Angin
Posisi Derajat (°) Arah Mata Angin
337.5 – 360 atau 0 – 22.5 Utara 22.5 – 67.5 Timur laut 67.5 – 112.5 Timur 112.5 – 157.5 Tenggara 157.5 – 202.5 Selatan 202.5 – 247.5 Barat Daya 247.5 – 292.5 Barat 292.5 – 337.5 Barat Laut Kuadran 𝑉𝑤1 𝑉𝑤2 ∠𝑇/𝑅𝑥 I Positif Negatif 𝑅𝑥2. II Negatif Negatif 𝑅𝑥1.
III Negatif Positif 𝑇𝑥2