DESAIN DAN PEMODELAN
SISTEM PROPULSI DAN STAND ALONE
SISTEM KONTROL PROPULSI KAPAL
M. Dakka Krisma Dwikade
2109 106 006
Dosen Pembimbing:
Arif Wahjudi, ST., MT., Ph.D.
Hendro Nurhadi, Dpil-Ing., Ph.D
.Jurusan Teknik Mesin Fakultas Tegnologi Industri
LATAR BELAKANG
Kenapa
sistem propulsi??
Belum dilakukan penelitian
sebelumnya
Ketergantungan produk
Penelitian Sebelumnya
•
Firmansyah (2012) telah melakukan penelitian
mengenai desain sistem propulsi berupa pemilihan
propeller jenis CPP (Controllable Pitch Propeller)
berdasarkan metode B-Screw Series, pemilihan
spesifikasi prime mover dan sistem transmisi pada
kapal Offshore Patrol Vessel 80.
•
Dullens (2009) telah melakukan penelitian
mengenai pemodelan matemaika komponen
propeller type CPP (Controllable Pitch Propeller)
berupa linear aktuator, servo hidrolik, makanisme
CPP
RUMUSAN MASALAH
SISTEM KONTROL PROPULSI
SISTEM PROPULSI
Bagaimana
menentukan
pemilihan
komponen
prime mover,
transmission,
dan propeller
berikut analisa
pemilihannya?
Bagaimana
memodelkan
dan mendesain
kontrol
kecepatan
propeller, pitch
propeller, dan
platform kapal
dengan
keluaran
kecepatan kapal
??
BATASAN MASALAH
•
Desain sistem propulsi berupa pemilihan spesifikasi prime mover,
transmisi, dan propeller
•
Prime mover berupa diesel engine, transmisi berupa redustion
gerabox, dan propeller berupa cotrollable pitch propeller
•
Desain sistem kontrol propulsi berupa Stand alone system
•
Input kecepatan propeller dan pitch propeller
•
Output kecepatan propeller, pitch propeller, dan kecepatan kapal
•
Kondisi perairan dan gelombang laut diabaikan
•
Simulasi dilakukan pada kondisi kondisi operasional kapal ahead
•
Analisa simulasi pada sistem kontrol kecepatan propeller dan
kontrol pitch propeller
TUJUAN DAN MANFAAT
SISTEM KONTROL PROPULSI KAPAL
SISTEM PROPULSI KAPAL
Memperoleh
jenis
komponen
prime mover,
transmission,
dan propeller
Memperoleh
desain dan
model kontrol
kecepatan
propeller, pitch
propeller, dan
platform kapal
dengan
keluaran
kecepatan kapal
SEKILAS TENTANG
SISTEM PROPULSI KAPAL [1]
PROPELLER SISTEM TRANSMISI PRIME MOVER
Controllable Pitch Propeller (CPP) Fixed Pitch Propeller (FPP)
Direct Drive Geared Drive Electrical Drive
Diesel Engine Turbin
SEKILAS TENTANG
SISTEM PROPULSI KAPAL [2]
Rt Vs EHP
DHP SHP BHPscr BHPmcr
Interaksi Propeller dan Lambung Kapal Kt – Kq - J
SEKILAS TENTANG
SISTEM KONTROL PROPULSI KAPAL [1]
CPP Diesel Engine
Pitch Control Speed Control
SEKILAS TENTANG
SISTEM KONTROL PROPULSI KAPAL [2]
SEKILAS TENTANG
SISTEM KONTROL PROPULSI KAPAL [3]
Konsep pengontrolan speed
METODOLOGI PENELITIAN [1]
•
Diagram Alir Penelitian
•
Kriteria Desain
Kriteria Desain
•
Misi kapal adalah kapal cepat patroli.
•
Kecepatan desain kapal yang diinginkan adalah 30
knots.
•
Kontrol yang akan diimplementasikan adalah stand
alone system sehingga masing – masing propulsi
memiliki kontrol yang berdiri sendiri. Dimana antara
satu propulsi dan propulsi yang lain bergerak sama.
•
Input yang digunakan pada sistem kontrol ini adalah
pitch dan kecepatan mesin yang diinginkan dengan
keluaran kecepatan kapal.
•
Kriteria sistem kontrol dengan settling time pitch
propeller dan kecepatan propeller kurang dari 23 s.
Konsep Desain
Sistem propulsi dan stand alone sistem kontrol
propulsi dengan diesel engine sebagai prime mover,
reduction gearbox sebagai transmission, dan
controllable pitch propeller (cpp) sebagai propeller.
Pemilihan Prime Mover [1]
Langkah Pemilihan:
a. Perhitungan Delivered Horse Power (DHP)
b. Perhitungan Shaft Horse Power (SHP)
c. Perhitungan Brake Horse Power service continuous rating (BHPscr)
d. Perhitungan Brake Horse Power maximum continuous rating (BHPmcr) 𝐷𝐷𝐷 = 𝐸𝐷𝐷𝐷𝑃
𝑆𝐷𝐷 = 𝐷𝐷𝐷𝜂𝜂𝜂𝜂
𝐵𝐷𝐷 𝑆𝑆𝑆 = 𝑆𝐷𝐷ηG
Pemilihan Prime Mover [2]
Prime Mover
Type
: S.M.E.T. Pielstick 18 PC4-2B
Daya
: 23850 kW
Kecepatan mesin
: 600 rpm
BHPMCR = 62127,54 hp = 46285,02 kW
Karena twin screw propeller maka, daya masing – masing engine Adalah 23142,5 kW
Pemilihan Propeller
Langkah Pemilihan:
a. Menentukan Power Absorbtion (BP) b. Pembacaan diagram BP-1
c. Menentukan nilai P/D dan δ0 dari pembacaan diagram BP-δ.
d. Menentukan nilai diameter optimum (DO) dari pembacaan diagram BP-δ. e. Menentukan nilai Pitch Propeller (PO)
f. Menentukan nilai diameter behind ship (DB) g. Menentukan nilai δB
h. Menghitung nilai (P/D)B
Pemilihan Propeller [1]
B5-45 B5-60 B5-75 B5-90 B5-105 N. Engine (rpm) 600,000 600,000 600,000 600,000 600,000 N. Propeller (rpm) 288,184 288,184 288,184 288,184 288,184 Pd (kW) 18892,160 18892,160 18892,160 18892,160 18892,160 Vs (knot) 30,000 30,000 30,000 30,000 30,000 Va (knot) 24,750 24,750 24,750 24,750 24,750 Bp 15,287 15,287 15,287 15,287 15,287 0,7139(Bp^2) 0,680 0,680 0,680 0,680 0,680 (P/D)o 0,965 0,945 0,950 0,980 1,030 1/Jo 1,465 1,490 1,490 1,465 1,430 δo 148,354 150,886 150,886 148,354 144,810 Do (feet) 12,741 12,958 12,958 12,741 12,437 Db (feet) 12,104 12,311 12,311 12,104 11,815 (P/D)b 1,005 0,975 0,980 1,015 1,065 1/Jb 1,392 1,416 1,416 1,392 1,359 δb 140,937 143,342 143,342 140,937 137,570 η 0,650 0,657 0,655 0,645 0,631Unit Type Propeller Pemilihan propeller B Screw Series
Pemilihan Propeller [2]
Propeller
Type propeller
: B screw series
Jumlah blade
: 5
Ae/Ao
: 0,6
Diameter
: 12,311 feet = 3,752 m
N. Propeller
: 288,184 rpm
Analisa Engine Propeller [1]
Analisa Engine Propeller [2]
Pembacaan koefisien thrust, koefisien torque, Koefisien advance Pada diagram open water
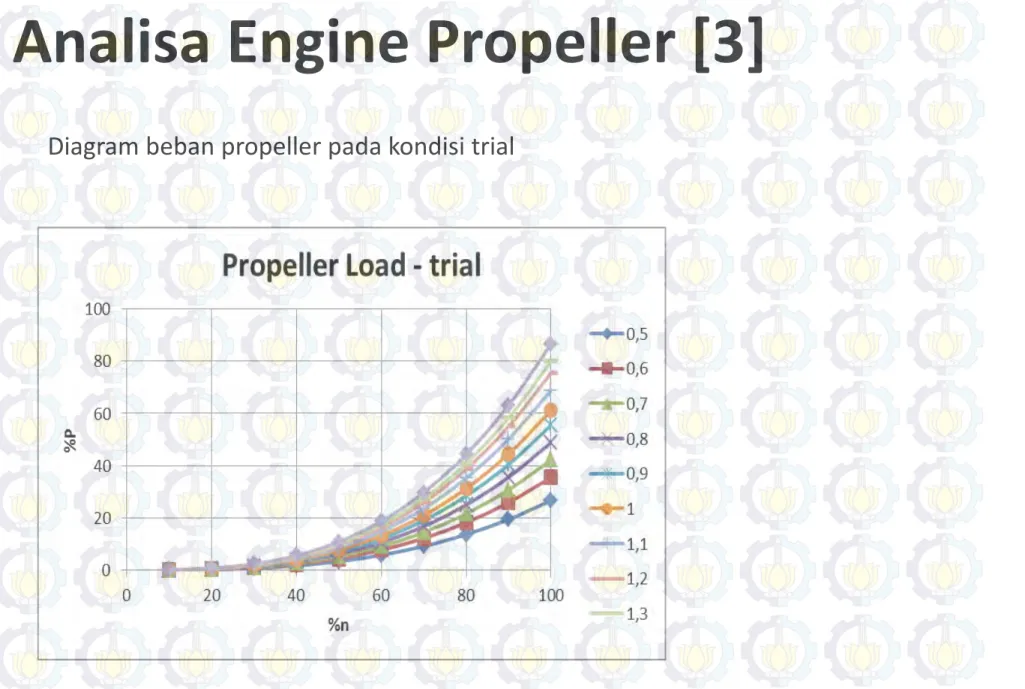
Analisa Engine Propeller [3]
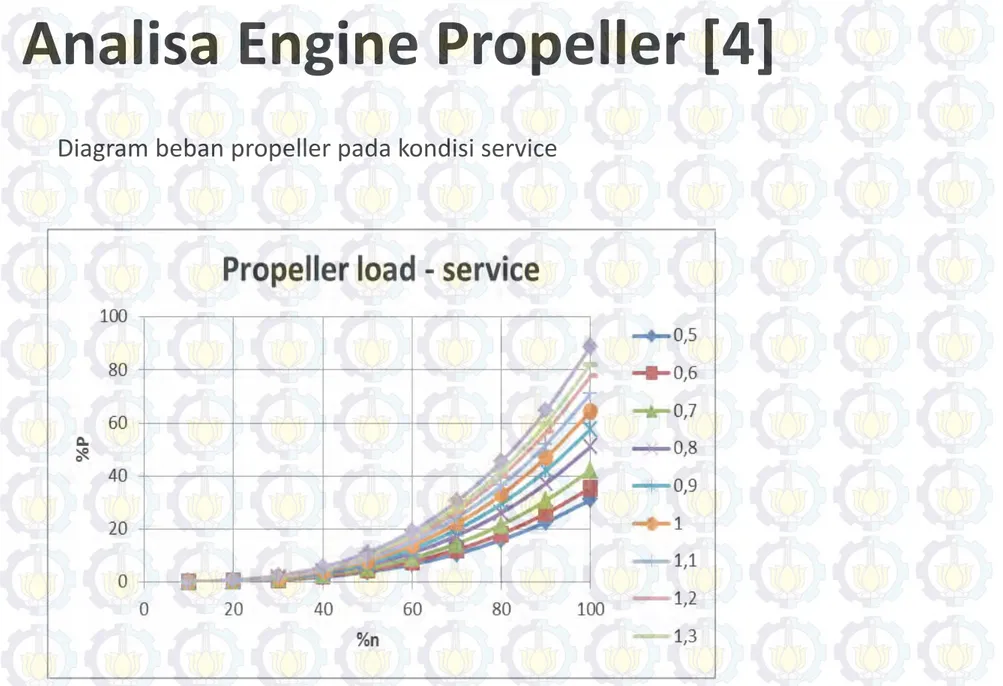
Analisa Engine Propeller [4]
DESAIN DAN PEMODELAN
Pemodelan Matematis [1]
Kontrol pitch propeller
Servo valve Servomotor hidrolika Crank 𝐼(𝜂) 𝐸(𝜂) = 1 𝐿𝜂 + 𝑅 𝑋 𝜂 𝐼 𝜂 = 𝐵𝐵 𝑀𝜂2 + 𝐶𝜂 + 𝑘 𝑌(𝜂) 𝑋(𝜂) = 𝐾 𝜂 𝜃(𝜂) 𝑦(𝜂) = 1 𝑟
Pemodelan Matematis [2]
Kontrol kecepatan propeller
𝐼(𝜂) 𝐸(𝜂) =
1 𝐿𝜂 + 𝑅
Servo valve Servomotor hidrolika Diesel engine
𝑋 𝜂 𝐼 𝜂 = 𝐵𝐵 𝑀𝜂2 + 𝐶𝜂 + 𝑘 𝑌(𝜂) 𝑋(𝜂) = 𝐾 𝜂 𝑛 𝜂 = 𝐶1 + 𝜏1. 𝑚̇ 𝜂1. 𝜂 𝑚̇ − 𝐶𝐶21 𝑇𝐿
Pemodelan Matematis [3]
Torsi propeller
𝐽 = 𝑛. 𝐷𝑉𝑉 𝑄 = 𝐾𝑄. 𝜌. 𝑁2. 𝐷5
Koefisien Advance Grafik Kq Propeller torque
𝐾𝑄 = 𝑓(𝐷 𝐷� , 𝐽) 𝐾𝑄 = 𝑄1 𝐷� + 𝑄𝐷 2.𝐽
Pemodelan Matematis [4]
Gaya dorong propeller
𝐾𝑇 = 𝑓(𝐷 𝐷� , 𝐽)
𝐽 = 𝑛. 𝐷𝑉𝑉 𝑇 = 𝐾𝑇. 𝜌. 𝑛2. 𝐷4
Koefisien Advance Grafik Koefisien Trust Propeller Thrust Thrust Deduction Factor
𝐾𝑇 = 𝑇1 𝐷� + 𝑇𝐷 2.𝐽
𝐽 = 𝑇3𝑉𝑉 + 𝑇4.𝑛 𝑇 = 𝑇5𝐾𝑇 + 𝑇6𝑛
𝑇𝐸
Pemodelan Matematis [5]
Dinamika kapal
𝑇 − 𝑅 = 𝑚. 𝑉
Kecepatan Kapal Kecepatan Advance 𝑉𝑉
Pemodelan Matlab-Simulink [1]
Pemodelan Matlab-Simulink [2]
Pemodelan Matlab-Simulink [3]
Pemodelan Matlab-Simulink [4]
Pemodelan Matlab-Simulink [5]
Simulasi Loop Terbuka [1]
Kontrol pitch propeller
Output:
- Nilai terus meningkat
- Tidak mampu mencapai setpoint yang
diinginkan Input:
- Unit step pada kondisi
operasional pitch propeller 0,975
Simulasi Loop Terbuka [2]
Kontrol kecepatan propeller
Output:
- Nilai terus meningkat
- Tidak mampu mencapai setpoint yang
diinginkan Input:
- Unit step pada kondisi
operasional kecepatan propeller 4,8 m/s
Simulasi Loop Terbuka [3]
Kontrol sistem propulsi
Output:
- Nilai terus meningkat
- Tidak mampu mencapai setpoint yang
diinginkan Input:
- Unit step pada kondisi
operasional pitch propeller 0,975
- Unit step pada kondisi
operasional kecepatan propeller 0,975
Simulasi Loop Tertutup [1]
Kontrol pitch propeller
Output:
- Settling time memenuhi kriteria desain - Mampu mencapai setpoint yang
diinginkan Input:
- Unit step pada kondisi
operasional pitch propeller 0,975
Watak Respon PID
Settling time 2,09 s
Rise time 1,12 s
Overshot 0,886 %
Simulasi Loop Tertutup [2]
Kontrol kecepatan propeller
Watak Respon PID
Settling time 19 s
Rise time 11,8 s
Overshot 0,835 %
Steady state error 0,03
Output:
- Settling time memenuhi kriteria desain - Mampu mencapai setpoint yang
diinginkan Input:
- Unit step pada kondisi
operasional kecepatan propeller 4,8 m/s
Simulasi Loop Tertutup [3]
Kontrol sistem propulsi
Watak Respon
Settling time 30,61 s
Rise time 15 s
Overshot 0 %
Steady state error 0
Output:
- Settling time memenuhi kriteria desain - Mampu mencapai setpoint yang
diinginkan Input:
- Unit step pada kondisi
operasional pitch propeller 0,975
- Unit step pada kondisi
operasional kecepatan propeller 4,8 m/s
Analisa Kestabilan Sistem[1]
Transfer fuction plant kontrol pitch propeller
Pole – pole berada di kiri bidang S, sistem stabil dengan kriteria
kestabilan sistem stabil jika K<169 berdasarkan perpotongan sumbu imajiner di ω= ±86,1
Analisa Kestabilan Sistem[2]
Transfer fuction plant kontrol kecepatan propeller
Pole – pole berada di kiri bidang S, sistem stabil dengan kriteria
kestabilan sistem stabil jika K<0,69 berdasarkan perpotongan sumbu imajiner di ω= ±5,87