Seminar Radar Nasional 2007
SEMINAR RADAR NASIONAL
Prosiding
Gedung Widya Graha LIPI
Jakarta, 18 – 19 April 2007
PENYELENGGARA :
Pusat Penelitian Elektronika dan Telekomunikasi
Lembaga Ilmu Pengetahuan Indonesia (PPET-LIPI)
dan
Sekolah Teknik Elektro dan Informatika (STEI – ITB)
bekerjasama dengan
International Research Centre for Telecommunications and
Radar (IRCTR) Delft University of Technology (TU Delft) The
Netherlands
Seminar Radar Nasional 2007
Prosiding
Seminar Radar Nasional 2007
ISBN : 9-793-68869-6
Hak cipta © 2007 oleh Pusat Penelitian Elektronika dan Telekomunikasi – LIPI
Hak cipta dilindungi undang-undang. Dilarang menyalin, memproduksi dalam segala bentuk, termasuk
mem-
fotocopy
, merekam, atau menyimpan informasi, sebagian atau seluruh isi dari buku ini tanpa ijin
tertulis dari penerbit.
Prosiding Seminar Radar Nasional / [editor by] Goib Wiranto, Mashury Wahab, A.A. Lestari,
A.B. Suksmono, Rustini S. Kayatmo, Purwoko Adhi.
vi + pp.; 21,0 x 29,7 cm
ISBN : 9-793-68869-6
Radio Detecting and Ranging (Radar)
Technical editing by Yusuf Nur Wijayanto, Dadin Mahmudin, and Yudi Yulius Maulana.
Cover design by Yadi Radiansah.
Diterbitkan oleh :
Pusat Penelitian Elektronika dan Telekomunikasi (PPET)
Lembaga Ilmu Pengetahuan Indonesia (LIPI)
Kampus LIPI Jl. Sangkuriang, Bandung
Telp. (022) 2504661 Fax. (022) 2504659
Website : www.ppet.lipi.go.id
Seminar Radar Nasional 2007
Pelindung
Deputi Ilmu Pengetahuan Teknik LIPI
Ketua Umum
Yuyu Wahyu
Panitia Pengarah
Lilik Hendradjaja, Dephan
Adang Suwandi, ITB
Masbah RT Siregar, LIPI
Tatang A. Taufik, BPPT
Hiskia Sirait, LIPI
Andriyan B Suksmono, ITB
A Andaya Lestari,IRCTR-IB
Endon Bharata, IRCTR-IB
Nana Rachmana, ITB
Mashury Wahab, LIPI
Syamsu Ismail, LIPI
Rustini S Kayatmo, LIPI
Purwoko Adhi, LIPI
Eko Tjipto Rahardjo, UI
Panitia Pelaksana
Ridwan Effendi, ITB
Andi Kirana, RCS
Gunawan Handayani, ITB
Pamungkas Daud, LIPI
Fredrika H K, LIPI
Iip Syarif Hidayat, LIPI
Deni Permana K, LIPI
Sri Hardiati, LIPI
Yudi Yulius Maulana, LIPI
Dadin Mahmudi, LIPI
Iqbal Syamsu, LIPI
Yusuf Nur Wijayanto, LIPI
Folin Oktafiani, LIPI
Sulistyaningsih, LIPI
Dedi, LIPI
Yadi Radiansah, LIPI
Zaenul Arifin, LIPI
Popi Sumarni, LIPI
Lisdiani, LIPI
Endang Ridwan, LIPI
Seminar Radar Nasional 2007
KATA PENGANTAR
Ungkap syukur kami panjatkan ke hadirat Allah SWT yang telah melimpahkan rahmat dan karunianya
sehingga Seminar Radar Nasional pada tanggal 18 – 19 April 2007 ini dapat terselenggara.
Selanjutnya kami mengucapkan selamat datang di kota Jakarta kepada para peserta seminar, pembicara
kunci, pemakalah poster dan para undangan lainnya. Adapun maksud dan tujuan diadakannya seminar ini
adalah menjadi sarana sosialisasi dan forum pertukaran informasi antara para pakar, peneliti dan
pengguna Radar, sehingga di akhir seminar ini diharapkan akan dapat dibentuk suatu wadah Asosiasi
Radar Indonesia (ASRI) atau Ikatan Ahli Radar Indonesia (IARI) yang akan membantu pemerintah dalam
permasalahan Radar di Indonesia. Suatu hal yang tidak mustahil bila teknologi, kebijakan dan pemecahan
masalah tentang Radar akan terungkap dalam seminar ini.
Seminar ini menghadirkan pembicara tamu dari pengarah/pembuat kebijakan dalam bidang Radar.
Akhirnya panitia mengucapkan terimakasih yang sebesar besarnya kepada Deputi IPT – LIPI, pembicara
undangan, peserta dan semua pihak yang telah membantu hingga terselenggaranya acara ini.
”Selamat dan sampai jumpa di seminar – seminar berikutnya”
Jakarta, 19 April 2007
Panitia
Seminar Radar Nasional 2007
Daftar Isi
Susunan Panitia ... iv
Kata Pengantar ... v
Daftar Isi ... vi
Daftar Makalah ... vii
Seminar Radar Nasional 2007
Daftar Makalah
1. Pengunaan UAIS dan Radar Pengawas Pantai Untuk Monitoring Wilayah Perairan Indonesia ... 1
Mashury Wahab
2. Pengaturan Footprint Pada GPR Dengan Modified Dipole Array ... 8
A Adya Pramudita, A Kurniawan, A Bayu Suksmono,A Andaya Lestari
3. Pembuatan Voltage Controlled Oscilator untuk Perangkat Pemancar Jamming ... 14
Elan Djaelani, Daday Ruhiat
4. Frequency Modulation Continuous Wave (FM-CW) Radar ... 21
Rustini Soemaryato Kayatmo
5. Potensi Electromagnetic Interference (EMI) dari Pancaran Sinyal Radar Spurious... 26
Sri Hardiati
6. Perancangan Antena Mikrostrip Linear Tapered Slot Bentuk V dengan Pencatu CPW
untuk Aplikasi Radar ... 31
Fitri Yuli Zulkifli, Bayu Aji, Eko Tjipto Rahardjo
7. Pendekatan Citra Radar menggunakan Parameter Time Return dan Power Return ... 35
Yusuf Nur Wijayanto
8. Ganesha Avionics Air Traffic Control System, Pemanfaatan RADAR dalam Bidang Pemanduan Lalu Lintas Udara Penerbangan Sipil ... 40
Oon Arfiandwi Martyono, Riza Satria Perdana
9. A Novel Ultra Wide Band (UWB) Antenna for Monostatic Microwave Radar (MMR) ... 46
Rudy Yuwono
10. Prinsip-Prinsip Dasar dan Pertimbangan Desain dari Radar Penembus Permukaan dengan Teknik Sintesa Frekuensi (SFCW-GPR) ... 51
Andriyan B. Suksmono, Adya Pramudita, Endon Bharata, A. Andaya Lestari, Nana Rachmana
11. Pemrosesan Sinyal untuk Data A-Scan GPR ... 58
Deni Yulian, A. Andaya Lestari
12. Pengukuran Late - Time - Ringing Antenna Menggunakan Sistem impulse GPR ... 63
Liarto, A.A. Lestari, E. Bharata
13. Beberapa Fitur pilihan pada Search-Radar yang diperlukan untuk peningkatan Efektifitas Operasi Radar dalam Aplikasi Pesawat Patroli Maritim... 67
Heri Eka Permana
14. State Feedback Robust Tracking Controller Based on Preview - Control Approach (Teori)... 74
Estiko Rijanto
15. Design of Radar Antenna Tracking Servo Using State Feedback Robust Tracking Controller Based on Preview - Control Approach (Aplikasi) ... 80
Estiko Rijanto
Seminar Radar Nasional 2007
16. Perancangan dan Realisasi Antena Wire Dipole Pengukur Dielektrik Tanah Menggunakan Metode FDTD 3D ... 86
Yuyu Wahyu, Andik Setiawan, Folin Oktafiani, A.A Lestari
17. Shaking Mechanism Dynamics for Micro-strip Array Antenna Used in Surveillance Coastal Radars ... 93
Edwar Yazid, Estiko Rijanto
18. Perhitungan Faktor Reflektivitas Radar dan Intensitas Hujan dari Pengukuran Distribusi Ukuran Titik Hujan di Surabaya ... 99
Lince Markis, Gamantyo Hendrantoro, Achmad Mauludiyanto
19. Pengukuran Variasi Temporal Curah Hujan di Surabaya dengan Disdrometer Optic 103
Muriani, Gamantyo Hendrantoro, Achmad Mauludiyanto
20. Analisa dan Simulasi Traffic Monitoring Kendaraan Bermotor menggunakan Bistatic Radar ... 107
Pamungkas Daud, R Nurmansyah Yarnaka, Heroe Wijanto
21. Fasilitas Pengujian Antena GPR di ITB ... 116
E. Bharata1, A.A. Lestari1, A.B. Suksmono, T.P. Soetikno D. Yulian, Liarto, A.G. Yarovoy, dan L.P. Ligthart
22. Perancangan dan Implementasi Antena Monopole 1GHz untuk Aplikasi Borehole GPR ... 121
Nana Rachmana, M.Nuramzan Iftari, Andriyan B Suksmono
23. Karakteristik Curah Hujan di Kotaagang menggunakan Radar Atmosfer Katulistiwa ... 126
Suaydhi
24. Model Antena Pita Lebar Perbahan Limbah dan Uji Hipotesa Antena ... 132
Soetamso
25. Peranan Radar Surveillance (PSR/SSR) dalam Pelayanan Lalu Lintas Udara di Indonesia dan ADS-B sebagai Sistem Alternatif ... 139
Abdullah Agus Ma’rufi, Moch. Abdul Azis
Seminar Radar Nasional 2007
Penggunaan UAIS dan Radar Pengawas Pantai
untuk Monitoring Wilayah Perairan Indonesia
Mashury Wahab
Pusat Penelitian Elektronika dan Telekomunikasi (PPET) – LIPI Jl. Cisitu 21/154D Bandung, 40135, Indonesia
Phone: 022- 2504661, Fax: 022- 2504659, Email: [email protected]
Abstract
Application of a UAIS and coastal surveillance Radar system to monitor Indonesian waters and also to improve the safety on sea is described in this paper. Integration of the UAIS systems with Radar systems in a network will increase the number of Indonesian waters that can be covered and safety guidance can be received by a larger number of ships. Accidents at the harbor can be minimized due to the traffic of incoming and outgoing vessels. Securing Indonesian waters against foreign infiltration can be improved by using this UAIS and Radar system. The ongoing research and development of the coastal surveillance Radar at the research centre for electronics and telecommunications (PPET-LIPI) including its milestones is also presented in this paper.
Keywords: UAIS, coastal surveillance Radar, network, ships, safety and milestones.
Abstrak
Dalam tulisan ini dipaparkan tentang aplikasi UAIS dan Radar pengawas pantai yang dapat digunakan untuk memonitor wilayah perairan Indonesia dan juga untuk meningkatkan keselamatan pelayaran. Integrasi sistem UAIS bersama Radar dalam suatu jaringan memungkinkan banyak wilayah perairan yang dapat dicakup serta panduan keselamatan pelayaran akan dapat diterima oleh banyak kapal. Kecelakaan dipelabuhan akibat kapal keluar masuk dapat dihindari. Pengamanan wilayah perairan Indonesia terhadap penyusupan asing dapat dikurangi dengan menggunakan system UAIS dan Radar ini. Penelitian dan pengembangan Radar pengawas pantai yang sedang berlangsung di pusat penelitian elektronika dan telekomunikasi (PPET-LIPI) juga dipresentasikan dalam tulisan ini termasuk langkah-langkah pencapaiannya (milestone).
Kata Kunci: UAIS, Radar pengawas pantai, jaringan, kapal-kapal, keselamatan, dan pencapaian.
I. Pendahuluan
A. Universal Automatic Identification System (UAIS)
UAIS (Universal Automatic Identification
System) adalah sistem transponder pemancar
diatas kapal yang beroperasi dalam pita VHF untuk maritim [4]. Sistem ini mampu untuk secara otomatis mengirimkan informasi kapal seperti identifikasi, posisi, tujuan, panjang dan jenis kapal serta informasi keselamatan lainnya. Informasi ini disampaikan ke kapal-kapal lainnya dan juga ke stasiun pengamatan ditepi pantai. Transponder AIS juga memungkinkan pesan pendek keselamatan navigasi untuk dikirimkan ke kapal tertentu atau ke semua kapal disekitar kapal yang mengirimkan pesan. Jangkauan transmisi efektif dari transponder UAIS akan tergantung daya transmisi dan tinggi antena. Secara umum, jangkauan ini sekurang-kurangnya 20 mil laut (36 Km).
Istilah Universal digunakan karena sistem UAIS mempunyai standar internasional untuk menjamin kompatibilitas antar kapal apabila
kapal-kapal tersebut bertemu dan juga kompatibilitas komunikasi antar kapal-stasiun dipantai-kapal. Pada saat komunikasi antar kapal, informasi navigasi tambahan akan memungkinkan petugas kapal untuk meng-identifikasi dan melacak kapal serta memberikan informasi kunci dalam rangka menghindari tabrakan. Kapal-kapal yang dilengkapi UAIS akan lebih mudah dideteksi pada saat cuaca buruk dan ombak tinggi dilautan.
Pada saat berhubungan dengan stasiun dipantai, kapal-kapal tidak perlu lagi untuk berkomunikasi lisan dengan stasiun karena peralatan AIS akan melakukannya secara otomatis. Lalulintas komunikasi radio menjadi berkurang dan Petugas distasiun tidak perlu setiap waktu memanggil kapal-kapal untuk melapor. Tetapi, Petugas tetap selalu dapat memonitor keberadaan kapal.
Aplikasi lain dari UAIS adalah:
• Transmisi pesan pendek ke kapal tertentu berkenaan dengan bahaya
Seminar Radar Nasional 2007
navigasi, manajemen lalulintas dan pelabuhan.
• AIS dengan bantuan alat lain juga dapat mengirimkan data lingkungan real-time tentang ombak, arus dan jarak pandang.
• Transmisi data Radar.
• Membantu dalam pencarian kapal yaitu untuk kepentingan SAR (search and
rescue).
International Maritime Organization (IMO)
sesuai dengan mottonya ‘perjalanan laut yang aman dan laut yang bersih’ telah menyetujui standar unjuk kerja AIS pada tahun 1997 yang diajukan oleh negara-negara skandinavia dan Eropa barat [4]. IMO menentukan semua kapal baru harus dilengkapi UAIS sejak 1 Juli 2002 dan pada Juli 2008 semua kapal harus sudah memiliki perangkat UAIS [4].
B. Radar Pengawas Pantai
Pengamanan dan pengawasan wilayah NKRI yang terdiri dari lebih 17.000 pulau dengan 2/3 wilayah terdiri dari lautan memerlukan aparat dan peralatan yang berjumlah sangat besar. Pada kenyataannya, kemampuan TNI-AL dan Polri untuk mengawasi wilayah RI sangat terbatas sehingga wilayah perairan Indonesia rawan akan pencurian ikan, pelanggaran wilayah oleh kapal-kapal asing, pembajakan kapal laut dan penyelundupan.
Salah satu cara untuk meningkatkan kemampuan aparat pemerintah dalam mengawasi dan mengamankan wilayah adalah dengan menggunakan Radar pengawas pantai untuk mengawasi pergerakan kapal laut sehingga dapat dicegah tindakan-tindakan yang dapat merugikan NKRI dan juga tabrakan kapal apabila hendak merapat ke pelabuhan. Pemasangan Radar pengawas pantai dengan daya besar (high power) di kapal atau dipinggir daratan (sekitar pantai) dapat digunakan untuk mengawasi wilayah laut yang luas sampai beberapa puluh mil laut atau sampai wilayah zona ekonomi eksklusif (ZEE).
Selain untuk mengawasi wilayah perairan Indonesia, Radar juga berperan sangat penting dalam mengatur lalulintas transportasi laut. Kapal-kapal yang masuk dan keluar pelabuhan dapat diatur sehingga terhindar dari tabrakan terutama pada saat cuaca buruk. Penggunaan Radar pantai (dengan alat UAIS)
memungkinkan wilayah perairan Indonesia dapat dimonitor sepanjang waktu sehingga tindakan illegal seperti pencurian ikan, perompakan, penyelundupan dapat segera dilakukan antisipasi.
Pengamanan wilayah Indonesia termasuk pulau-pulau terluar/terdepan akan sangat terbantu dengan adanya Radar pantai. Hal ini didukung oleh fakta-fakta berikut [1, 2]:
Wilayah Indonesia terdiri dari lebih 17 ribu pulau dan 2/3 diantaranya berupa lautan.
Jarak dari Sabang di NAD ke Jayapura di Papua +/- 3 ribu mil laut (5.556 km).
Jumlah Kapal TNI-AL 117 buah dan 77 kapal diantaranya berusia 21-60 tahun.
Perbandingan jumlah kapal terhadap luas wilayah perairan: 1:72 ribu km persegi.
Dibutuhkan sekitar 350 kapal patroli untuk seluruh wilayah perairan.
Merupakan suatu tugas berat bagi pemerintah dalam hal pengadaan Radar dari luar negeri untuk memenuhi kebutuhan Radar pengawas pantai untuk wilayah Indonesia yang panjang garis pantainya 5000 km dimana jumlah Radar yang dibutuhkan sangat besar. Hal ini diperburuk oleh kondisi perekonomian bangsa yang sedang terpuruk ini sehingga tidak memungkinkan pemerintah untuk membeli banyak peralatan Radar dari luar negeri yang umumnya bernilai sangat mahal (dari U$10.000 sampai dengan jutaan U$ dollar). Hal ditambah oleh sulitnya mekanisme pembelian Radar yang bernilai strategis dibidang keamanan.
Gambar 1. Contoh Radar Pengawas Pantai.
Seminar Radar Nasional 2007
Gambar 3 memperlihatkan daerah jangkauan Radar pantai apabila dilakukan instalasi Radar pantai diseluruh Indonesia. Daerah jangkauan ini ditentukan oleh daya pancar, penguatan antena, polarisasi antena dan lebar berkas (beamwidth).
Setiap Radar pantai dilengkapi alat UAIS untuk kemudahan identifikasi kapal-kapal yang dimonitor. Kemudian, semua Radar pantai dihubungkan oleh suatu network (jaringan) sehingga bisa terintegrasi. Dikarenakan kondisi Indonesia yang terdiri dari kepulauan, maka komunikasi antara Radar pantai satu dengan lainnya dan juga dengan stasiun pusat dilaksanakan melalui satelit sehingga bisa lebih andal.
II. Sistem UAIS
Dalam gambar 4, diperlihatkan suatu skenario lalu lintas laut dimana ada tiga kapal yang saling berhubungan satu sama lain melalui peralatan UAIS mereka. Kapal-kapal tersebut juga berhubungan dengan stasiun-stasiun (yang memiliki Radar pantai didalamnya) yang ada dipulau-pulau yang dilewati serta dengan sebuah anjungan minyak lepas pantai. Melalui komunikasi ini, kapal-kapal dapat terhindar dari tabrakan dan dapat mengenali satu sama lain. Informasi navigasi termasuk cuaca juga diterima kapal-kapal untuk membantu kelancaran perjalanan. Stasiun-stasiun dipulau-pulau yang dilewati turut memandu dan memonitor kapal-kapal termasuk kapal-kapal yang akan berlabuh.
International Telecommunication Union
(ITU) telah menentukan dua alokasi kanal VHF untuk UAIS yaitu pada frekuensi 161.975MHz dan 162.025MHz. Standar teknis untuk UAIS disetujui oleh ITU pada November 1998. Kriteria teknis yang ditentukan antara lain:
z Karakteristik Transceiver
z Modulasi
z Format data, pesan dan kemasan
z TDMA (time division multiple access)
z Manajemen Kanal
Contoh spesifikasi minimum untuk UAIS diperlihatkan pada Tabel 1 [5].
Dalam gambar 5 [6], diperlihatkan sebuah blok diagram sistem UAIS yang terhubung dengan sumber daya, antena, dan bermacam-macam peralatan/sensor dikapal termasuk sistem navigasi terintegrasi. Pada saat
instalasi, informasi statis yang berhubungan dengan kapal harus dimasukkan ke memori alat UAIS antara lain identitas, panjang, jenis kapal, dan lokasi antena. Unit akan dilengkapi minimal dengan keyboard dan display yang berfungsi untuk mengetahui status informasi alat dan target.
Pada saat dalam perjalanan, peralatan UAIS akan memancarkan secara kontinyu dan automatis posisi dari kapal serta semua informasi statis dan dinamis sesuai dengan standar IMO. Operator harus memasukkan data yang berhubungan dengan perjalanan, antara lain:
• Ketinggian kapal dibawah air • Jenis kargo berbahaya yang dibawa • Tujuan dan perkiraan sampai • Rute yang digunakan
• Status navigasi sesungguhnya
Tampilan pada suatu peralatan UAIS yang berada dipusat pengendali (master station) diperlihatkan dalam gambar 6 [3]. Simbol bintang menandakan keberadaan kapal-kapal internasional yang tertangkap oleh sistem UAIS, sementara simbol bulat adalah kapal-kapal yang tidak memakai UAIS. Kapal-kapal dengan simbol bulat bisa merupakan kapal lokal ataupun kapal internasional (asing).
Gambar 2. Contoh Alat Sistem UAIS
Seminar Radar Nasional 2007
Gambar 3. Illustrasi jangkauan deteksi Radar di seluruh wilayah Indonesia.
Gambar 4. Contoh konfigurasi sistem UAIS. Pulau
Pulau
Kapal 3 Anjungan
Minyak Lepas Pantai
Stasiun 2
Kapal 2
Pulau
Stasiun 1 Kapal 1
Pulau
Tabel 1. Spesifikasi Sistem UAIS.
Seminar Radar Nasional 2007
Gambar 5. Contoh Blok Diagram dari Sebuah Perangkat UAIS.
Gambar 6. Contoh tampilan pada peralatan UAIS.
Seminar Radar Nasional 2007
III. Sistem Radar Pengawas Pantai
Pada saat ini dilakukan pembuatan satu Radar pantai di PPET-LIPI. Komponen Radar pantai yang dibuat terdiri dari perangkat pengolah citra Radar, antena, pemancar dan penerima.
Terdapat dua jenis Radar yang paling utama yaitu Radar pulse dan Continuous Wave (CW). Kombinasi Radar jenis ini dengan teknik-teknik modulasi lain melahirkan banyak jenis-jenis Radar lain, seperti Radar Frequency-modulated
Continuous Wave (FM-CW). Secara prinsip,
teknologi perangkat keras Radar tidak banyak mengalami perubahan. Dibandingkan perangkat kerasnya, perkembangan teknologi perangkat lunak untuk Radar berkembang pesat sehingga banyak informasi yang dapat diperoleh melalui penggunaan Radar seperti: jarak obyek, kecepatan obyek, bentuk obyek dan kontour dari obyek (3 dimensi). Dikarenakan hal ini, peranan perangkat lunak di Radar semakin vital.
Pada penelitian ini, kami melakukan disain dan implementasi antena mikrostrip yang bersifat modular yang memiliki nilai inovasi dibandingkan antena-antena Radar yang sudah ada. Disain dan implementasi sistem transmitter
dan receiver Radar dilakukan dengan
bekerjasama dengan IRCTR. Disain dan implementasi perangkat lunak pengolahan citra Radar khusus juga kami lakukan dalam penelitian ini. Jadi, melalui penelitian ini kami dapat memberikan unsur keterbaruan (novelty) karena baik perangkat keras maupun perangkat lunak bukan merupakan suatu copy atau plagiat dari sistem Radar yang sudah ada.
Dipilih tipe Radar FM-CW dalam penelitian ini sehingga tidak diperlukan komponen magnetron yang umumnya dipakai di Radar tipe
Pulse dan berharga sangat mahal. Radar ini
memiliki daya pancar yang kecil tetapi dapat menjangkau daerah yang luas. Antena yang digunakan tipe modular sehingga penguatan antena dapat ditambah untuk menjangkau wilayah yang lebih luas. Pengalaman dalam penelitian Radar telah dilakukan oleh beberapa Institusi di Indonesia sejak beberapa tahun yang lalu seperti ITB dan LIPI tetapi belum intensif dan kontinyu sehingga belum memberikan hasil yang memadai.
Kemampuan dalam pembuatan Radar harus dibangun untuk menghindari ketergantungan dari luar negeri serta prosedur pembelian Radar yang rumit. Hal ini ditambah oleh kenyataan bahwa apabila hanya satu tipe Radar pantai yang
digunakan di Indonesia maka akan mempermudah integrasi dalam satu jaringan/network karena tidak memerlukan
interface/adapter antar perangkat lunak dan
keras yang berbeda seperti apabila digunakan jenis Radar yang berbeda-beda.
Gambar 7. Blok diagram Radar FM-CW.
Blok diagram Radar secara umum dapat direpresentasikan pada Gambar 7 [7]. Sistem Radar terbagi atas dua bagian utama yaitu
transmitter (pemancar) dan receiver (penerima).
Hasil deteksi Radar akan ditampilkan oleh
display unit yang mengolah sinyal yang diterima
dari bagian Receiver menjadi suatu gambar yang dapat diinterpretasikan dengan mudah oleh pengguna. Terdapat dua antena yang masing-masing digunakan untuk memancarkan sinyal Radar ke obyek yang ingin diamati dan untuk menerima sinyal Radar yang dipantulkan oleh obyek. Antenna control yang berfungsi untuk mengatur agar gerakan antenna sesuai dengan tampilan dilayar dari display unit. Synchronizer
berfungsi untuk menyesuaikan sinyal-sinyal yang dikirimkan oleh transmitter dengan tampilan yang diinginkan di display unit.
IV. Langkah-langkah Untuk
Mereali-sasikan Radar Pengawas Pantai Yang
Dilengkapi UAIS
Untuk mencapai sasaran penelitian yaitu suatu sistem Radar pengawas pantai yang dilengkapi dengan UAIS, maka tim peneliti dari PPET-LIPI telah menetapkan milestones
(langkah-langkah pencapaian) sebagai berikut: • Tahun 2006: Disain Antena, Disain
Perangkat Lunak (software) dan Disain Perangkat Keras (hardware).
Synchronizer Transmitter
Display Unit Receiver Power Supply
Antenna Control Video
Antenna
Seminar Radar Nasional 2007 • Tahun 2007: Implementasi Antena,
Perangkat Lunak dan Keras.
• Tahun 2008: Integrasi seluruh bagian sistem dan juga dengan peralatan UAIS, Testing dan Kalibrasi. • Setelah tahun 2008, akan dilakukan
pengembangan Radar pengawas pantai kedalam satu jaringan/network.
V. Hasil dan Pembahasan
Dalam tulisan ini telah dipresentasikan tentang sistem UAIS dan Radar serta integrasi antara kedua sistem ini. Sistem Radar yang dilengkapi oleh UAIS sangat membantu untuk mengatur lalu lintas laut diwilayah Indonesia serta meningkatkan keselamatan pelayaran terlebih lagi pada saat cuaca buruk. Pengawasan wilayah Indonesia juga dapat dilakukan sepanjang waktu tanpa mengeluarkan ongkos besar untuk patroli kapal. Apabila ada tindakan illegal diwilayah perairan Indonesia, aparat yang berwenang dapat segera bertindak.
Spesifikasi dan blok diagram sistem UAIS serta blok diagram sistem Radar juga telah dipresentasikan. Langkah-langkah pencapaian sasaran dalam penelitian berkelanjutan ini juga telah disampaikan.
VI. Kesimpulan
Sistem UAIS dan Radar yang terintegrasi untuk meningkatkan keselamatan pelayaran dilaut dan pengawasan perairan Indonesia telah dipresentasikan dalam tulisan ini. Penggunaan Radar pengawas pantai akan sangat membantu aparat yang berwenang untuk mencegah
tindakan illegal termasuk penyusupan kapal asing di perairan Indonesia. Pembuatan jaringan Radar akan sangat membantu pengawasan wilayah Indonesia secara menyeluruh. Kemandirian bangsa dalam pembuatan Radar harus dibangun untuk menghindari ketergantungan terus menerus dari pihak luar negeri.
VII. Daftar Pustaka
[1] Harian Kompas, ’ Indonesia Butuh Ratusan Kapal Patroli Laut’, 11 September 2003.
[2] Poedjo Purnomo,’ Menjaga Laut Sungguh Tidak Mudah’, Harian Kompas, 4 Nopember 2004.
[3] Haemiwan Fathony, ’ Pemanfaatan ICT Untuk Mengamankan Selat Malaka’, Detikinet, 13 September 2005.
[4] IALA/AISM, ’ IALA Guidelines on the Universal Automatic Identification System (AIS),’ Volume 1, Part 1- Operational Issues, Edition 1.1, December 2002.
[5] OFCOM, ‘ UK Interface Requirement 2025’, Version 2.0, July 2005.
[6] SAILOR, ’SAILOR UAIS 1900’, Product brochure dan diakses dari www.sailor.dk. [7] Leo P. Ligthart, ’Short Course on Radar
Technologies’, International Research Centre for Telecommunications-transmission and Radar, TU Delft, September 2005.
Seminar Radar Nasional 2007
Pengaturan Footprint pada GPR dengan Modified Dipole Array
1,2)
A. Adya Pramudita, 1)A. Kurniawan, 1)A. Bayu Suksmono, 1)A.Andaya Lestari
1) International Research Centre for Telecommunications and Radar – Indonesian Branch (IRCTR-IB) STEI - ITB, Jl. Ganesha 10 Bandung 40132, Indonesia ,Phone: +62-22-2501661, +62-22-2534134
2)Unika Atmajaya Jakarta Indonesia , [email protected]
Abstrak
Footprint antena merupakan parameter penting untuk mendapatkan hasil deteksi yang bagus dalam survey GPR. Kondisi tanah yang berbeda-beda, yang menutupi objek akan mempengaruhi ukuran footprint antenna sehingga diperlukan antenna yang memiliki kemampuan adaptasi terhadap kondisi tanah yang berbeda-beda. Antena tersebut harus mampu menjaga agar footprint relatif konstan pada kondisi tanah yang berbeda-beda. Footprint antena berhubungan dengan dimensi dari antena. Pada paper ini, Modified dipole array diusulkan sebagai antenna adaptif terhadap footprint untuk aplikasi GPR. Dengan menggunakan RF switch circuit, maka elemen pada array yang akan dicatu dapat dipilih bersesuaian dengan footprint yang akan dihasilkan. Jika coupling antar elemen pada array begitu signifikan maka skenario adaptasi tersebut akan gagal. Pembebanan resistif digunakan untuk menekan level coupling antar elemen array.
Kata kunci : Footprint, Antena Adaptif, Modified Dipole, Coupling, Pembebanan Resistif.
Pendahuluan
Pada setiap survey GPR terdapat kemungkinan bahwa objek yang akan dideteksi terkubur pada kondisi tanah yang berbeda-beda. Kondisi tanah yang berbeda-beda akn menyebabkan hasil pendeteksian yang berbeda-beda. Sehingga menjadi suatu hal penting bahwa antenna yang digunakan memiliki kemampuan adaptasi terhadap kondisi tanah yang berbeda-beda tersebut.. Untuk mendapatkan hasil pendeteksian yang optimum maka pengaturan footprint menjadi hal yang penting. Footprint yang optimum sebanding dengan dimensi luasan dari objek yang akan dideteksi. Jika footprint antenna terlalu besar maka akan menghasilakn clutter yang besar. Jika footprint terlalu kecil maka akan sulit dalam mengenali objek.
Pengaturan footprint menjadi suatu tantangan dalam riset-riset pada bidang GPR. Pada paper ini dikembangkan sebuah antenna yang memiliki kemampuan adaptasi terhadap kondisi tanah yang berbeda-beda sedemikin hingga footprint dapat terjaga relatif konstan. Pada paper ini dikaji array Modified dipole untuk antena adaptif terhadap footprint. Telah dijelaskan sebelumnya bahwa footprint antenna berhubungan dengan dimensi antena. Penelitian sebelumnya menunjukan bahwa pengaturan footprint dilakukan dengan mengatur flare angle
dari antenna wire bow-tie [1],[3]. Mengatur flare angle dari antena wire-bowtie berarti mengubah-ubah aperture antena. Sistem antenna array yang diuslukan terdiri dari beberapa elemen antenna yang memiliki dimensi yang berbeda-beda,
namun memiliki karakteristik yang relatif sama. Footprint antenna akan besar jika dimensi antena besar dan sebaliknya. Kemudian dengan menggunakan RF Switch sirkit maka akan dipilih elemen array yang akan dicatu bersesuaian dengan footprint yang akan dihasilkan. RF Switch sirkit berfungsi untuk memilih elemen yang akan dicatu.
Coupling antar elemen pada array menjadi penting untuk dipertimbangkan berhubungan dengan skenario pengaturan footprint pada paragraf sebelumnya. Jika level coupling antar elemen besar maka skenario pengaturan footprint dengan antenna array seperti yang dijelaskan sebelunya akan gagal. Terdapat beberapa metode yang yang telah diteliti untuk menekan level coupling. Level coupling pada dipole array dapat ditekan dengan melapisi radiator dengan substrat dielektrik[6]. Level coupling pada dipole array dapat ditekan hingga dibawah -30 dB dengan memberikan slit, dan memasang metal penghalang [7]. Metode tersebut tidak mendukung untuk mendapatkan desain yang kompak.
Pada penelitian yang kami lakukan sebelunya menunjukan bahwa pembebanan resistif dapat menekan level coupling anatar elemen pada array [8]. Tapi di sisi lain pembebanan resistif dapat mengurangi efisiensi radiasi. Namum pada system GPR masalah ini dapat dipebaiki dengan lebih sederhana pada postprocessing. Sistem antena array ditunjukan pada gambar 2..
Methode Momonet (MoM) dipilih sebagai metode numeric untuk analisa pada penelitian
Seminar Radar Nasional 2007 ini. Dipilihnya metode momen mengacu pada
sistem GPR yang dimana antenna adaptif akan diimplementasikan. Antena adaptif yang akan dikembangkan dimplementasikan Stepped Frequency Continuous Wave (SFCW) GPR. SFCW-GPR adalah radar domain frekuensi. Suatu N-lement array dapat dimodelkan sebagai suatu N-port network. Matrik Scattering dan matrik impedansi dapat dihitung dengan menggabungkan antara MoM dengan persamaan N-port Network .
SFCW-GPR
Salah satu kendala dalam sistem radar impulse adalah melakukan pembangkitan pulsa sempit yang akan ditembakkan pada objek target. Semakin sempit pulsa, maka semakin komplek metode dan piranti yang digunakan. Dengan konsep relasi Transformasi Fourier maka pembangkitan pulsa dapat didekati dengan sintesa frekuensi, yaitu dengan melakukan penyapuan dari frekuensi rendah ke frekuensi tinggi. Sistem SFCW-GPR ditunjukan pada gambar 1.
Gambar 1: Sistem SFCW GPR
Struktur Array untuk Antena Adaptif
terhadap Footprint
Perancangan antena untuk aplikasi GPR selalu mengacu pada suatu kebutuhan aplikasi tertentu. Jadi sangat tidak mungkin suatu antena dapat digunakan secara universal untuk berbagai aplikasi dengan kinerja yang setara. Untuk
aplikasi SFCW maka kriteria yang harus dipenuh tidak terlalu ketat dibanding impulse radar. Terutama masalah liniearitas fasa. Pada SFCW linearitas fasa tidak menjadi pertimbangan yang terlalu penting seperti pada impulse radar [2].
Untuk mendapatkan kemampuan adaptasi mengatur footprint pada kondisi tanah yang berbeda-beda maka diusulkan suatu antena array dengan elemen penyusun yang memiliki dimensi berbeda-beda. Kemudian secara elektronik akan dilakukan pengaturan elemen yang akan dicatu dengan rangkaian RF Switch. Untuk mendapatkan footprint yang besar maka elemen yang dicatu diplih yang besar, begitu pula sebaliknya. Sedang elemen yang lain yang tidak dicatu, menjadi elemen yang diharapkan tidak menghasilkan radiasi yang signifikan yang diakibatkan adanya efek coupling. Efek
coupling harus ditekan seminimal mungkin
sehingga skenario untuk mengatur footprint antena dengan memilih elemen antena yang akan dicatu, tidak gagal.
Percobaan sebelumnya menunjukan bahwa pembebanan resistif pada ujung-ujung antenna microstrip dipole dapat mereduksi coupling antar elemen secara signifikan[8]. Walaupun pembebanan secara resistif akan menurunkan efisiensi radiasi, tapi pada aplikasi GPR dapat dilakukan kompensasi pada postprocessing. Teknik ini lebih sederhana dan lebih efektif dalam menekan coupling dibanding beberapa teknik yang telah diteliti sebelumnya. Berdasarkan hal diatas maka antenna adaptif untuk SFCW GPR dirancang menggunakan struktur array dengan pembebanan resistif dan pengaturan pencatuan secara eletronik menggunakan RF switch.
A/D Conv.
+ IFFT Frequency
Synthesizer Display
Modified dipole array dikaji sebagai antenna adaptif terhadap footprint untuk GPR.
Gambar 2: Modified microstrip dipole array dengan pembebanan resisitif.
I Q
TX a na
Quadrature Mixer
Resistive load
nten RX antenna
Substrate
dielektric Feeding circuit
Ground plane
RF
Seminar Radar Nasional 2007 Dari konsep dasar perancangan tersebut
yang perlu dikaji adalah bentuk dari elemen array dan bentuk array sedemikian hingga antenna memiliki karakteristik ultra wideband dan memiliki impedansi input yang relatif konstan pada rentang frekuensi penyapuan SFCW GPR(500 Mhz-5 Ghz). Selain itu juga perlu dipertimbangkan supaya antenna rancangan mempunyai bentuk yang kompak. Bentuk susunan yang konsentris akan
menghasilkan bentuk yang kompak. Resistor
Simulasi
Antena didesain untuk diimplementasikan pada Stepped Frequency Continuous Wave (SFCW) GPR. SFCW-GPR adalah radar domain frekuensi. Sehingga pada kasus ini MoM adalah metode analisa yang tepat sebab MoM adalah analisa pada domain frekuensi. Suatu N-lement array dapat dimodelkan sebagai suatu N-port network. Matrik Scattering dan matrik impedansi dapat dihitung dengan menggabungkan antara MoM dengan persamaan N-port Network[8]. Parameter Scattering, , dimana menunjukan level coupling antar elemenn and m .
nm
S
m
n
≠
Pada paper ini dibanding beberapa bentuk modified dipole array sepeti ditunjukan pada gambar 3. Setiap modified dipole array didesain dengan stuktur microstrip pada substat dielectrik FR4-epoxy dengan εr=4.4 dan ketebalan 3.2 mm.
Gambar 3: Bebeapa bentuk modified dipole array yang dikaji.
Resistor
Gambar 3: Bebeapa bentuk modified dipole array yang dikaji.
Gambar 4: Struktur Mikrostrip untuk modified dipole pada gambar 3.
Hasil simulasi menunjukan bahwa bentuk dari modified dipole berpengaruh terhadap level coupling antar elemen pada array. Pada simulasi ditunjukan bahwa modified dipole memiliki bentuk-bentuk transisi mendadak akan menghasilkan level coupling yang lebih tinggi. Hal ini disebabkan karena daerah pada transisi mendadak akan meradiasikan EM lebih efektif disbanding tempat lain. Bentuk modified dipole yang memiliki karakteristik pada level coupling dan efisiensi, ditunjukkan pada gambar 3. Bentuk susunan modified dipole nampak mendukung untuk mendapatkan desain yang kompak.
Via1 Via2 Via3
R1 R2 R1 (Resistive Load)
Resistor
Seminar Radar Nasional 2007
Gambar 5: Modified Dipole Array dengan pembebanan resistif.
Gambar 6 sampai gambar 9 menunjukkan hasil simulasi MoM dari modified dipole array pada gambar 5. Hasil simulasi menunjukan bahwa tiap elemen pada array memiliki karakteristik yang relatif sama (gambar 6,8,9). Parameter Scattering,
S
nm , dimanan
≠
m
menunjukan level coupling antar elemenn and m. S12 menunjukan level coupling antara Element-1 dan Element-2. Nampak bahwa pembebanan resistif dapat menenkan level coupling dengan baik. Coupling antar elemen yang berdekatan relative sama(S12,S21), dan akan menurun dengan bertambahnya jarak(S13). VSWR pada port 1,2,3 menunjukkan bahwa tiap elemen selain memiliki karakterisit yang relatif sama, juga menunjukan bahwa tiap elemen juga memiliki karakteristik ultrawidband.
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 dari modified microstrip dipole array
dengan beban resistif 100 Ohm
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
frequency (GHz)
M
Gambar 7: Level Coupling antar elemen pada modified dipole array.
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Real Part (port 1) Real Part (port 2) Real Part (port 3) Imaginary Part (port 1) Imaginary Part (port 2) Imaginary Part (port 3)
Gambar. 8 Impedansi input port 1, 2, 3
frequency (GHz)
M
VSWR port 1 VSWR port 2 VSWR port 3
Gambar .9 VSWR pada port 1, 2, 3
Dengan asumsi bahwa antenna akan diletakan sangat dekat dengan permukaan tanah , maka kajian ukuran footprint yang dihasilkan didekati dengan analisa medan dekat. Medan dekat sebanding dengan daerah yang diiluminasi. Jika setiap elemen yang aktif/ dicatu pada array
Seminar Radar Nasional 2007 menghasilkan daerah medan dekat yang
berbeda-beda maka skenario pengaturan footprint dengan sistem array berhasil. Hasil simulasi menunjukan bahwa perbedaan elemen array yang dicatu akan menghasilkan luasan medan dekat yang berbeda. Elemen dengan dimensi besar akan menghasikan daerah medan dekat yang besar, begitu juga sebaliknya. Sehinga hasil simulasi tersebut menunjukkan bahwa footprint anten dapat dilakukan dengan sistem antenna array diatas.
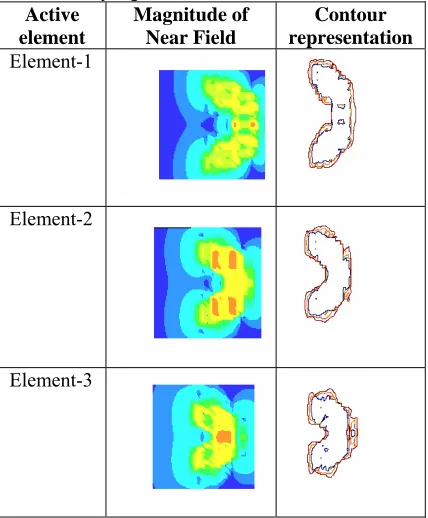
Table I : Medan dekat modified dipole array dengan elemen aktif yang berbeda-beda
Active element
Magnitude of Near Field
Contour
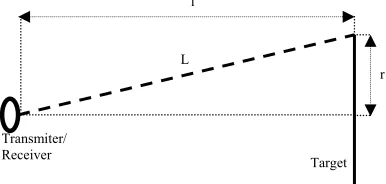
Pemodelan untuk simulasi footprint berdasar atas model pengukuran footprint pada gambar 10. Dimana antenna TX diletakkan sangat dekat dengan permukaan tanah dan antenna RX diletakkan didalam tanah dengan kedalaman h. Kemudian Antena TX digerakkan men-scan luasan yang akan diobservasi. Sehingga jika
S12n(f) adalah scattering parameter antara port 1
Antena TX yang ditempatkan pada titk n dengan port 2, yang dihitung dengan metode Mom dan N-port network Equation, maka S12n(f)
menunjukan fungsi transfer dari media. Jika S1(f) adalah spectral dari monocycle pulse yang disintesa oleh Frekuensi sinteser, maka output dari port 2 S2n(f) adalah S1(f). S2n(f). Setelah dilakukan rekonstruksi maka didapatkan S2n(t). Berdasarkan nilai S2n(t) footprint dapat ditentukan.
Port 1 Antenna TX
h= 10 cm
ε
r=4
µ
r=3
Antenna RX
Port 2
Gambar 10: Model pengukuran footprint
Table II: Footprint antenna modified dipole array dengan elemen aktif yang berbeda-beda
Active element
Footprint antena
Element-1
Pembebanan Resistif yang digunakan dapat menekan level coupling secara siknifikan sehingga hanya elemen yang dicatu saja yang efektif meradiasi sedangkan elemen lain yang tidak dicatu tidak efektif meradiasi. Hal ini
Seminar Radar Nasional 2007 terjadi karena arus induksi akan diserap oleh
beban resistif pada tiap elemen parasif.
Struktur konsentrik dapat direalisasikan pada Modified dipole array sehingga mendukung untuk mendapatkan bentuk yang kompak. Hasil simulasi menunjuka bahwa elemen array yang memiliki bentuk-bentuk transisi mendadak akan memiliki level coupling yang lebih tinggi.
Hasil simulasi menunjukan bahwa setiap elemen aktif pada antena array menghasilkan luasan medan dekat yang berbeda. Ukuran medan dekat sebanding dengan dimensi antena. Begitu juga hasil simulasi footprint pada Tabel II juga menunjukan kesimpulan yang sama. Sehingga disimpulkan bahwa pengaturan footprint dapat dilakukan dengan sistem antenna array yang diusulkan.
Referensi
[1] A.A. Lestari, Antennas for Improved Ground Penetrating Radar: Modeling
Tools, Analysis and Design, Ph.D.
dissertaion, Delft University of Technology, The Netherlands, 2003.
[2] J. Daniel, Ground Penetrating Radar 2nd Edition, IEE Radar Sonar, Navigation And Avionics Series 15, 2004.
[3] A.A. Lestari, A.G. Yarovoy, L.P. Ligthart, “Adaptive wire bow-tie antenna for GPR applications”, IEEE Transactions on
Antennas and Propagation, vol. 53, no. 5,
pp. 1745-1754, May 2005.
[4] A.A. Lestari, A.G. Yarovoy, L.P. Ligthart, “Numerical and experimental analysis of circular-end wire bow-tie antennas over a lossy ground”, IEEE Transactions on
Antennas and Propagation, vol. 52, no. 1,
pp. 26-35, January 2004.
[5] A.A. Lestari, A.G. Yarovoy, L.P. Ligthart, “Analysis and design of improved antennas for GPR”, Subsurface Sensing
Technologies and Applications, vol. 3, no.
4, pp. 345-376, October 2002.
[6] Pisti B Katehi, “Mutual Coupling Between Microstrip Dipoles in Multielement Arrays”, IEEE Transaction Antenna And
Propagation. Vol 37, No. 3, March 1989.
[7] Tatsuo Itoh, “Planar Antenna Arrays for Ku/Q Bands”, Department of Electrical Engineering, University of California, Los Angeles, California 90095. Final Report 2000-2001 for MICRO Project 00-041: Rockwell Science Center.
[8] A. Pramudita, A.Kurniawan, A.B Suksmono, “ Resistive Loading for Coupling Reduction Between element in array antenna for GPR”, Proceeding of Joint International Conference on TSSA-WSSA, Bandung, Dec 2006. R. S. Elliott and G. J. Stern." The design of microstrip dipole arrays including mutual coupling, Part I: Theorq ." IEFE Trans.Antennas
Propagation. vol ,4P-29. pp. 757-760.
Sept. 1981.
[9] G. J. Stern and R. S. Elliott, "The design of microstrip dipole arrays Includlng mutual coupling, Part 11: Experiment."
IEEE Trans.Antennas Propagation.. vol.
AP-29. pp. 761-165. Sept. 1981.
[10] N. G. Alcxopoulos and I. E. Rana. "Mutual impedance computation between printed dipoles.".IEEE Trans.Antennas
Propagation.vol. AP-29, Jan.1981.
[11] D. M. Pozar, "Input impedance and mutual coupling of rectangular microstrip antenna”, IEEE Trans. Anrennas
Propagution.vol.AP-30. Nov. 1982.
[12] E. Rana and N. G. Alexopoulos, "Current distribution and input impedance of printed dipole,”IEEE Trans. Antennas
Propagation vol. AP-29.Jan 1981(44
7
k
I
Seminar Radar Nasional 2007
Pembuatan
Voltage Control Oscilator
untuk Perangkat Pemancar
Jamming
Elan Djaelani1),Daday Ruhiat2)
1)Pusat Penelitian Informatika-LIPI
Jl.Cisitu No.21/154D.Kompleks LIPI Bandung.40135 Telp.022-2504711,Fax.022-2504712
2)
Pusat Penelitian Elektronika dan Telekomunikasi-LIPI Jl.Cisitu No.21/154D.Kompleks LIPI Bandung.40135
Telp.022-2504660,Fax.022-2504659
Abstract
Research on developing of Voltage Control Oscilator (VCO) for a jamming signal transmitter unit has been carried out. A jamming signal transmitter is a radio transmitter used to destroy the function of electronic communication system. Jamming’s done by using a signal with same frequency and much higher power level. It makes the receiver will detect only the higher power jamming signal, lost the intended signal, and cause communication trouble of totally mulfunction.
A jamming signal transmitter unit requires a wide bandwidth. VCO has to work on higher frequency in order to gain a wide enough deviation, because increasing the working frequency higher increaser the deviation proportionally.
Output of the VCO worked on high frequency has a wide bandwidth. Because intended signal should have lower frequency, mixing process have to be done. This system’s called heterodyne system.
Output of the mixing process, with LO frequency, is the IF operating frequency of jamming transmitter. It will be bandpass -filtered out, amplified up to certain signal level and it will be transmitted through a broadband antenna. After several trial’s completed, the reserach succesfully results a VCO prototype for the jamming transmitter unit.
Keywords : Voltage Control Oscilator, jamming, IF.
Abstrak
Telah dilakukan penelitian mengenai pembuatan Voltage Control Oscilator (VCO) untuk keperluan perangkat pemancar jamming. Perangkat pemancar jamming adalah pemancar radio yang digunakan untuk melumpuhkan sistim komunikasi elektronik dengan cara menimpa atau menutupi sinyal dari suatu pemancar dengan sinyal lain ( sinyal jamming) yang mempunyai frekuensi sama dan daya yang lebih besar, sehingga penerima hanya akan mendeteksi sinyal jamming yang mempunyai daya lebih besar, ini akan mengakibatkan komunikasi terganggu atau bahkan macet sama sekali.
VCO dengan bandwidth yang lebar diperlukan untuk membuat sinyal jamming pada perangkat pemancar jamming. Untuk memperoleh deviasi (penyimpangan) yang cukup lebar, suatu VCO harus bekerja pada frekuensi yang lebih tinggi, semakin tinggi frekuensi kerja VCO maka deviasi yang terjadi adalah berbanding lurus.
Pembuatan VCO bekerja pada frekuensi lebih tinggi akan mencapai bandwidth yang lebar,karena frekuensi keluaran yang dikehendaki lebih rendah, diperlukan proses penurunan frekuensi dengan demikian perlu proses mixing dan sistim ini disebut dengan system heterodyne
Dari proses mixing dengan frekuensi LO diperoleh frekuensi IF, dalam hal ini daerah frekuensi operasi pemancar jamming.
Selanjutnya setelah dilewatkan kedalam suatu Bandpass Filter frekuensi IF tersebut diperkuat oleh suatu Amplifier sehingga menghasilkan daya tertentu untuk selanjutnya dipancarkan melalui sebuah Antena broadband. Setelah melalui percobaan percobaan telah dapat diperoleh prototipe VCO yang diperlukan perangkat pemancar jamming.
Kata kunci: Voltage Control Oscilator, Jamming, IF.
1.
Pendahuluan
Perangkat pemancar jamming adalah pemancar radio yang digunakan untuk melumpuhkan sistim komunikasi elektronik dengan cara menimpa atau menutupi sinyal dari
suatu pemancar dengan sinyal lain ( sinyal
jamming) yang mempunyai frekuensi sama dan
daya yang lebih besar , sehingga penerima hanya akan mendeteksi sinyal jamming yang mempunyai daya lebih besar, ini akan
Seminar Radar Nasional 2007 mengakibatkan komunikasi terganggu atau
bahkan macet sama sekali.
Perangkat pemancar jamming akan dibuat mempunyai spesifikasi sebagai berikut :
Daerah frekuensi: 30MHz – 80 Mhz Sistem: Pemancar Heterodyne
Modulasi : Modulasi Frekwensi / Modulasi Amplituda.
Input Modulasi : Wideband Noise
Pembawa : Sweeper 30 – 80 Mhz Waktu Sweep : Variable
Power Output : 100Watts
Harmonic Frekuensi out of band- 45 dB
Antenna : Broadband Omnidirectional
Blok diagram perangkat pemancar jamming
seperti pada gambar 1.
Gambar 1: Blok diagram perangkat pemancar
jamming.
VCO 310-360 Mhz : berfungsi untuk membangkitkan sinyal pembawa (carrier)
frekuensi 310Mhz –360 Mhz
Preamplifier : berfungsi untuk memeperkuat sinyal yang berasal dari oscillator VCO
Sawtooth Generator : berfungsi untuk membangkitkan sinyal gigi gergaji 50 – 200 Hz Noise Generator : berfungsi untuk membangkitkan sinyal Noise
Sum : berfungsi untuk menjumlah / menggabungkan
Local Oscillator : berfungsi untuk membangkitkan sinyal 390 Mhz untuk mencampur Mixer
Mixer : berfungsi untuk mencampur frekuensi VCO dengan Local Osc sehingga menghasilkan selisihnya IF frekuensi
Bandpas Filter : berfungsi untuk menyaring frekuensi yang tidak dikehedaki
Power Amplifier: berfungsi untuk memperkuat sinyal dari hasil output Bandpass Filter
sehingga dihasilkan daya 100 Watts untuk diteruskan ke antenna
2.
Dasar Teori
2.1.Sawtooth Signal
Perangkat pemancar jamming dirancang berdasarkan prinsip dari sweeper oscillator. VCO inputnya diberikan suatu sinyal berbentuk gigi gergaji (sawtooth) maka pada output VCO akan terjadi penyimpangan (deviasi frekuensi) sesuai dengan besaran frekuensi pemodulasi
(sawtooth signal).
Sebagaimana diperlihatkan pada gambar bentuk dari sebuah sinyal gigigergaji.
Gambar2: Sinyal gigi gergaji (sawtooth)
Pada gambar 2. diperlihatkan saat t1 start dari sinyal sawtooth maka, frekuensi VCO mulai bergerak mengikuti bentuk sinyal tersebut dan akan berakhir pada saat t2 stop dan seterusnya. Pengulangan akan terjadi pada periode berikutnya sehingga kecepatan pengulangan ditentukan oleh besarnya frekuensi dari sawtooth tersebut, jadi kecepatan sweeping dari VCO ditentukan oleh besarnya frekuensi dari sawtooth oscillator.
Gambar 3: Hubungan sinyal sawtooth dengan
frekwensi output.
Pada Gambar 3. tampak output VCO pada waktu t1 – t2 menghasilkan frekuensi carrier dari f1 – fn.
Dalam rangkaian VCO terdapat dari sebuah dioda varactor, dengan cara mempengaruhi bias tegangan mundurnya maka nilai kapasitansi dari varactor tersebut akan berubah sebanding
Seminar Radar Nasional 2007 dengan perubahan tegangan biasnya, sehingga
frekuensi VCO ikut berubah juga.
2.2.VCO ( Voltage Control Oscillator )
Merupakan rangkaian Varactor modulator dengan jenis Osilator Clapp yang pengembangannya berasal dari Osc Colpits cara kerjanya diuraikan sebagai berikut :
Gambar 4: Osilator Clapp
R1 dan R2 merupakan resistor untuk tegangan bias arah mundur Dioda Varactor Vd1. Terjadinya frekuensi resonansi ditentukan oleh nilai Induktor L dan nilai nilai kapasitansi dari Dioda Varactor, C1 dan C2.
Rangkaian osilator dipilih dengan konfigurasi common collector dengan tujuan diperoleh output impedansi rendah, dan jenis transistor Tr adalah type BFR 91 dengan cutoff Freq (ft) = 500 Mhz, hie min = 60
Untuk menentukan besaran frekuensi resonansi maka nilai nilai kapasitansi dan induktor L dihitung dengan rumus
Persyaratan untuk terjadinya osilasi :
hfb > –
Tentukan misalnya nilai C1=12pf, dan C2=2pf
–
0
.
14
Menentukan nilai Induktor L
Untuk memperoleh besaran harga Induktor L maka kita tentukan frekuensi yang akan direncanakan, misal :
fr = 335 Mhz (frekuensi tengah) Cv = 5 pf (kapasitansi dioda Varactor) Cv ditentukan sesuai dengan data pada kurva grafik Gambar 5.
Sebagai contoh dipakai type Varactor MV 2105 yang terdapat banyak di pasaran.
Karakteristik MV2105 diperlihatkan pada karakteristik Gambar 5.
Gambar 5: Kurva karakteristik Cv berbanding VR
Dari kurva gambar 5. untuk sumbu horisontal VR variasi tegangan mundur (Reverse bias) dimulai 0,1V - >20V sedangkan pada sumbu vertikal untuk peruban kapasitansi dioda (pf) dimulai 2pf – 35 pf.
Perhitungan
Fr = 335 Mhz, Cv = 5 pf , C1 = 12 pf, C2 = 2 pf (nilainya kita ditentukan )
Seminar Radar Nasional 2007 Dari perhitungan diperoleh harga induktansi
L sebesar 0.15 µH, fr = 335 Mhz (merupakan frekuensi tengah diantara 310Mhz – 360Mhz). Agar Oscilator VCO dapat bekerja mulai dari 310Mhz – 360Mhz perlu dilakukan pengaturan tegangan bias dengan cara merubah tegangan kontrol Dioda varactor seperti pada Gambar 5.
2.3.Local Oscillator
Rangkaian LO dipakai untuk dicampurkan (mixed) dengan Osc VCO agar diperoleh selisih IF frekuensi yang lebih rendah, rangkaian ini dibuat hampir sama dengan rangkaian VCO. Perbedaan hanya pada rangkaian capasitor resonansinya yaitu capasitornya dibuat tetap (fix).
Lihat Gambar.6 rangkaian oscillator LC Clapp, walaupun rangkaian LO ini menggunakan LC tetapi stabilitasnya cukup dihandalkan.
Frekuensi LO dibuat lebih tinggi daripada VCO yaitu 390 Mhz.
Gambar 6: Rangkaian Clapp LC Local Oscillator
2.4.Mixer (Pencampur)
Mixer berfungsi sebagai pencampur antara frekuensi RF VCO dengan LO (Local Oscillator) hasil pencampuran menghasilkan frekuensi selisih yaitu Frekuensi IF, spectrum frekuensi IF tersebut seperti terlihat dalam Gambar.7, dan rangkaian lengkapnya seperti pada Gambar.8.
Gambar 7: Spektum frekwensi dari sinyal RF dan L0 berikut harmonisanya.
Mixer dengan sistim Double Balance Mixer(DBM) terdiri dari 4 buah dioda dan 2
buah transformator merupakan rangkaian pasif seperti dalam gambar 10, keuntungan penggunaan DBM adalah intermodulation product yang dihasilkan lebih baik dari pada memakai mixer aktif sedangkan kerugiannya memerlukan level pencampur LO yang sangat besar + 7dBm serta conversion loss dari RF ke IF seperti digambarkan dalam grafik Gambar 10.
Gambar 8. Rangkaian Mixer
Gambar 9. Double Balance Mixer
Gambar 10. Conversion loss RF to IF
2.5. Bandpass Filter ( BPF )
BPF berfungsi menyaring sinyal IF hasil dari output mixer dimana komponen frekuensi seperti spektrum frekuensi (gambar 8.) 2IF, 3IF, LO, RF + 2 LO, 2 RF – LO dan lain sebagainya ditekan (reject), hanya frekuensi IF saja yang dilewatkan untuk kemudian masuk ketingkat berikutnya untuk diperkuat oleh bagian power amplifier.
Seminar Radar Nasional 2007 Spesifikasi BPF
Frekuensi kerja : 30 – 80 Mhz Impedansi : 50 Ω
Passband Frequency : 50 Mhz (BW) Insertion Loss filter : max 3 dB Ripple factor : ± 1 dB
3.
Metodologi
Pada pembuatan Voltage Control Oscilator
ini penulis melaksanakan metoda reverse
engineering. Peralatan sweep generator yang
ada dan biasa dipergunakan di laboratorium merupakan salah satu sumber dari bahan studi literatur.
Buku manual menerangkan prinsip kerja dari sweep generator kami pelajari ,sehingga kami mengetahui prinsip dari sweep generator.
Pada buku tersebut juga ada diagram blok sistem sweep generator beserta diagram-skematiknya.
Komponen komponen baik pasif dan aktif seperti : transistor, resistor, capasitor, induktor, trafo dan lainnya yang ada pada buku manual dipelajari data datanya untuk dipergunakan untuk mencari komponen ekivalennya, sesuai yang ada di pasar komponen elektronika kita. Percobaan percobaan dilaksanakan dengan cara coba langsung tiap blok, lalu diukur hasilnya serta hasil pengukuran dievaluasi. Uji coba dilaksanakan terus sehingga didapatkan hasil yang baik.
Dari hal diatas dapat disimpulkan bahwa metodologi yang kami laksanakan adalah sebagai berikut :
1. Studi literatur dari manual peralatan sweep generator.
2. Mengumpulkan data data komponen yang dipergunakan peralatan sweep generator. 3. Mengumpulkan data data komponen
equivalent yang dipergunakan peralatan sweep generator.
4. Mendisain ulang sweep generator dengan komponen yang ada dipasar , terutama bagian Voltage Control Oscillator..
5. Mencoba pembuatan blok rangkaian yang merupakan bagian dari Voltage Control Oscillator.
6. Pengukuran hasil percobaan dan melaksanakan evaluasi.
7. Mengulangi percobaan,pengukuran dan evaluasi sampai didapatkan Voltage Control
Oscillator yang memenuhi persyaratan
untuk perangkat jamming.
4.
Hasil dan Pembahasan
4.1.Hasil Pengukuran Sawtooth Generator
Diagram blok pengukuran adalah seperti pada Gambar 11.
Gambar 11: Diagram blok pengukuran Sawtooth Generator
Gambar 12: Foto hasil pengukuran Sawtooth Generator
Sinyal output Sawtooth Generator ini telah mampu membuat ( sebagai input VCO) VCO mengeluarkan output frekwensi dengan deviasi yang lebar.
4.2.Hasil Pengukuran Voltage Control
Oscillator ( VCO )
Diagram blok pengukuran adalah seperti pada gambar13.
Gambar 13: Diagram blok pengukuran Voltage
Control Oscillator ( VCO )
Gambar 14: Foto hasil pengukuran Voltage Control
Oscillator
Seminar Radar Nasional 2007 Output VCO dengan frekwensi center = 335
MHz dan levelnya = -1,5 dBm.
4.3.Hasil Pengukuran Local Oscillator
Diagram blok pengukuran adalah seperti pada Gambar 15.
Gambar 15: Diagram blok pengukuran Local
Oscillator
Gambar 16: Foto hasil pengukuran Local Oscillator
Output Local Oscilator dengan frekwensi = 390 MHz dan levelnya = +7 dBm.
4.4.Hasil Pengukuran VCO Yang dimodulasi
oleh Sinyal Sawtooth
Diagram blok pengukuran adalah seperti pada gambar17.
Gambar 17: Diagram blok pengukuran VCO dimodulasi Sinyal Sawtooth
Gambar.18. Foto hasil pengukuran VCO dimodulasi Sinyal Sawtooth
Hasil pengukuran VCO dengan daerah kerja frekwensi 310 Mhz - 360 MHz dan mempunyai level 0 dBm.
4.5.Hasil Pengukuran IF
Diagram blok pengukuran adalah seperti pada Gambar 19.
Gambar 19: Diagram blok pengukuran IF.
Gambar 20: Foto hasil pengukuran IF.
Hasil pengukuran IF dengan frekwensi
center = 55 Mhz dan deviasi beberapa MHz
dengan level -4 dBm.
4.6.Hasil Pengukuran IF melalui BPF
Diagram blok pengukuran adalah seperti pada gambar 21.
Sawtooth Oscillator
LO Oscillator
IF Out
VCO
IF BPF
Gambar 21: Diagram blok pengukuran IF melalui BPF.
Seminar Radar Nasional 2007 1. Suhana Hermana,ST ,Daday Ruhiat,Amd,
Agus Witarna,Djaelani, Dede Ibrahim, Patricius, dan Dardi, Puslit Elektronika dan Telekomunikasi-LIPI.
2. Ir.Rustamaji,MT, Jurusan Teknik Elektro, FTI, ITENAS.
3. Ir.Rusmana,MT, Peneliti
DISLITBANGAL, TNI AL.
4. Bambang Sugiarto,ST, Ridodi
Anantaprama,ST, Agus Subekti,ST,MT., Rico Dahlan,ST. Puslit Informatika-LIPI. 5. yang telah membantu dalam pekerjaan ini.
Gambar 22: Foto hasil pengukuran IF melalui BPF.
7.
Daftar Pustaka
Hasil pengukuran IF dengan frekwensi center = 55 Mhz dan deviasi 25 MHz dengan level = -7 dBm.
[1] International Defense Review - Electronic Warfare
[2] Military Technology - Electronic in Defence
5.
Kesimpulan
Dengan mengamati hasil pengukuran pada Gambar 22 terlihat output VCO yang bekerja pada daerah 30MHz – 80 MHz , menyapu sebagian dari pada daerah frekwensi tersebut.
Output VCO ini akan diperkuat oleh Power Amplifier dan seterusnya akan dipancarkan melalui antena yang broadband.
Frekwensi yang berubah dengan cepat dan bergerak berulang ulang ini akan menimpa atau menutupi sinyal dari suatu pemancar yang diterima oleh penerima yang berada pada jangkauan pemancar jamming , sehingga penerima hanya akan mendeteksi sinyal jamming yang mempunyai daya lebih besar, ini akan mengakibatkan komunikasi terganggu atau bahkan macet sama sekali.
Dari hasil pengukuran dan juga ujicoba VCO yang dibuat telah sesuai dengan kebutuhan VCO untuk perangkat pemancar jamming.
[3] Defences Electronic - The Electronic Navy
[4] R, Skaug, J.F. Hjelmstad – Spread Spectrum In Communication
[5] Marvin K. Simon etc – Spread Spectrum Communication
[6] Rustamaji; Elan Djaelani, ‘Pemancar Frequency Hopping Spead Spectrum Untuk Pengamanan Sinyal Informasi”, Jurnal Teknologi Informasi LIPI, Vol 3 no 1, 2002.
[7] Rustamaji; Elan Djaelani, ‘Frequency Hopping Spead Spectrum Suatu Teknik Pengamanan Komunikasi Pada Perang Elektronika (Electronic Warfare)”, Prosiding, Pemaparan Hasil Litbang 2003 LIPI, 2003
[8] Small, M,”HF Amateur Band Frequency Syntheziser”, Electronic Wireless World, Vol 85 no 1519.
[9] Plessey Semiconductor, “Frequency Dividers and Synthesyzers IC Handbook”.
6.
Ucapan Terima Kasih
Penelitian ini dilaksanakan di Puslit Elektronika dan Telekomunikasi-LIPI. Terima kasih disampaikan kepada :
[10] Ulrich L, Rohde; T T N
Bucher,”Communication Receiver : Principles and Design”,McGraw Hill.
[11] NEC, Manual Books Sweep Generator.
Seminar Radar Nasional 2007
Frequency Modulation Continuous Wave (FM-CW) Radar
Rustini Soemaryato Kayatmo*)
*)
Pusat Penelitian Elektronika dan Telekomunikasi
Jl. Cisitu 21/154D (Komplek LIPI Gd 20) Bandung 40135 Indonesia
Phone: 022-2504660 Fax: 022-2504659 Email: [email protected]
Abstract
All types of modulation either Pulsed or CW Radar are equally good in providing detection against a background of thermal noise, so long as the receiving system is matched to the transmitted spectrum. The high incidence of pulsed-radar system in actual use testifies to their advantages in a number of practical matters, however. First is the available isolation between transmitter and receiver, which is accomplished by time switching in the duplexer of the pulsed radar. Systems using modulated CW transmissions have been built for a number of applications, but there are always serious problems encountered in isolation of the receiver and transmitter, which often raise the receiver noise level above that of thermal noise. Second, the time resolution between adjacent targets and between targets and short range clutter is usually better in the pulsed systems than is the frequency resolution of c-w system[1]. However, FM-CW radar has grown to a mature state owing to new breakthrough in microwave and computer hardware. FM-CW radar requires low output power, hence avoids hardware complications which arise as a result of high power requirements as in case of pulsed radar[2].
Keywords : CW Radar, modulation, detection, Pulse, FM-CW.
Abstrak
Semua jenis modulasi baik radar pulsa maupun c-w, memberikan pendeteksian yang sama baiknya terhadap background thermal noise, sepanjang system penerimanya sesuai dengan spektrum yang dipancarkan. Akan tetapi pada sistem radar pulsa (pulsed radar), dalam penggunaannya mempunyai berbagai keuntungan. Pertama, memungkinkan terjadinya isolasi antara pemancar dan penerima, yang dilakukan oleh time switching yang ada di duplexer dari radar pulsa. Sistem yang menggunakan transmisi c-w telah dibuat untuk sejumlah penggunaan, namun selalu ada permasahalan yang serius yang menyangkut isolasi antara penerima dan pemancar, yang sering menaikkan level noise penerima diatas thermal noise. Kedua, resolusi waktu (time resolution) antara target-target yang bersebelahan dan antara target-target yang lain dan benda-benda sekitar (clutter) jarak dekat biasanya lebih baik pada sistem radar pulsa daripada resolusii frekuensi pada system c-w[1]. Akan tetapi FM-CW radar sekarang sudah menjadi lebih matang dengan adanya terobosan di piranti keras (hardware) gelombang mikro (microwave) dan computer. FM-CW radar hanya memerlukan daya rendah, makai dapat menghindari kasulitan di piranti keras, tidak seperti pada radar pulsa yang memerlukan daya tinggi[2].
Kata kunci : CW Radar, modulasi, deteksi Pulse, FM-CW.
1.
Pendahuluan
Radar atau Radio Detection and Ranging
adalah suatu sistem yang menggunakan gelombang elektromagnetik untuk mengamati jangkauan, ketinggian, arah atau kecepatan baik obyek bergerak maupun diam seperti pesawat terbang, kapal laut, kendaraan bermotor, keadaan cuaca dan lapangan. Adapun prinsip kerjanya adalah, suatu pemancar memancarkan gelombang radio, yang direfleksikan oleh target dan dideteksi oleh alat penerima yang biasanya berlokasi ditempat yang sama dengan alat pemancar. Walaupun sinyal radio yang dikembalikan biasanya sangat lemah, sinyal radio tersebut dengan mudah dapat diperkuat. Hal ini memungkinkan radar dapat mendeteksi
obyek pada jangkauan dimana pancaran lain seperti suara atau sinar, sangat lemah untuk dideteksi, oleh karena itu penggunaan radar mempunyai keuntungan antara lain: [3]
Dapat mendeteksi target yang berada ditempat yang sangat jauh;
Dapat mengukur jangkauan dengan cepat dan teliti;
Dapat bekerja ditempat gelap dan disegala cuaca dengan uap, asap, kabut dan sebagainya;
Kecepatan relatif dari target dapat diukur.
Adapun kelemahannya:
Aspek resolusi yang terbatas:
o Raw video yang mewakili sinyal
yang kembali tidak
Seminar Radar Nasional 2007 mengindikasikan sudut target
(target angle);
o Sulit untuk membedakan obyek-obyek yang berdekatan
Kadang-kadang sinyal yang kembali palsu
Radar banyak digunakan untuk berbagai keperluan seperti:
Mendeteksi dan mengukur jarak obyek di tanah, laut maupun udara;
Air Traffic Control;
Guidance;
Tracking
Penggunaan di Meteorologi;
Pengukuran kecepatan;
Remote sensing
Untuk menghindari benturan/tabrakan
2.
Jenis-jenis Sistem Radar
Seperti diketahui ada dua macam system radar yaitu radar pulsa (pulsed radar) dan radar c-w (c-w radar). Apabila radar memancarkan deretan pulsa yang dimodulasikan pada gelombang pembawa sinusoidal, maka gelombang pantulan (echo) akan terlihat seperti deretan pulsa yang di delay (selama target berada didalam cakupan antena radar). Gambar 1. menunjukkan deretan pulsa yang ditransmisikan tersebut.
Gambar 1: Pulsa yang dipancarkan menuju target
Keterangan gambar:PW = lebar pulsa, PRT= Pulse Repetition Time yaitu waktu antara awal pulsa ke awal pulsa berikutnya, PRF = Pulse Repetition Frequency, yaitu frekuensi pengulangan pulsa.
Delay dari setiap pulsa relative terhadap pulsa yang ditransmisikan, akan menunjukkan jarak terhadap target. Radar mengindikasikan arah dari obyek dengan arah antena pada waktu menerima pantulan pulsa. Total energi yang dikembalikan ke radar oleh pulsa-pulsa tersebut
dapat digunakan sebagai indeks kemampuan mendeteksi dan kemampuan melakukan pengukuran radar tersebut. Batas unjuk kerja kemampuan radar mendeteksi target adalah perbandingan antara total energi dengan kepadatan spektrum (spectral density) noise di alat penerima. Maka kemampuan radar dalam mendeteksi target bergantung kepada daya rata-rata (average power) dari pemancar, waktu selama daya tersebut membawa informasi dari target, dan geometri dari radar dan situasi target, tanpa dipengaruhi oleh bentuk modulasi sinyal yang digunakan dalam transmisi. Dalam sistem radar pulsa, energi yang diterima dapat direpresentasikan sebagai produk dari daya pulsa yang diterima, lebar pulsa dan jumlah pulsa yang terkandung dalam deretan pulsa. Sebaliknya rata-rata waktu penerimaan daya selama observasi, dapat digunakan untuk mengukur energi yang diterima.
Persamaan radar atau “Radar equation”
menggambarkan proses secara matematik, yang dapat digunakan untuk menghitung jarak maksimum sebagai fungsi dari lebar pulsa (pulse
width, PW) dan pulse repetition rate (PRR).
Dalam banyak hal, pulsa yang sempit dengan PRR tinggi digunakan untuk jarak dekat, sistem dengan resolusi tinggi, sedangkan lebar pulsa yang lebih besar dan PRR rendah, digunakan untuk mengamati obyek dengan jangkauan jauh.
Problem utama dari radar adalah mendeteksi target diantara random noise yang dihasilkan alat penerima atau radiasi yang berasal dari benda gelap (black body) yang ada disekitarnya. Noise tersebut dikenal sebagai “thermal noise”, baik yang dihasilkan dari dalam maupun dari luar radar.[4]
Radar dimana output pemancarnya tidak diinterupsi, kebalikan dari radar pulsa dimana outputnya terdiri dari pulsa-pulsa yang sempit, disebut Continuous-wave radar. Keunggulan dari CW radar adalah kemampuannya mengukur kecepatan dengan ketelitian tinggi berdasarkan prinsip doppler shift pada frekuensi sinyal yang dikembalikan oleh target. Yang dideteksi adalah pergeseran frekuensi gelombang yang dipantulkan dengan nilai yang merupakan fungsi dari kecepatan relatif antara target dan pemancar-penerima. Data jangkauan diambil dari perubahan frekuensi doppler terhadap waktu. Gambar 2. berikut menunjukkan effect Doppler tersebut.






![Gambar 1: Prinsip kerja pencatuan CPW [7]](https://thumb-ap.123doks.com/thumbv2/123dok/3340911.1410280/40.595.350.540.179.343/gambar-prinsip-kerja-pencatuan-cpw.webp)