Vol.4 No.4 2019 38 @2019 kitektro
Perancangan Sistem Pengukuran Massa pada Pengemasan Gabah Berbasis Mikrokontroler
ATmega328p
Khairul Munzir
1, Alfatirta Mufti
2, Aulia Rahman
31,2,3
Jurusan Teknik Elektro dan Komputer, Fakultas Teknik, Universitas Syiah Kuala Jl. Tgk. Syech Abdurrauf No. 7, Darussalam, Banda Aceh, 23111, Indonesia
1
[email protected]
2
[email protected]
3
[email protected]
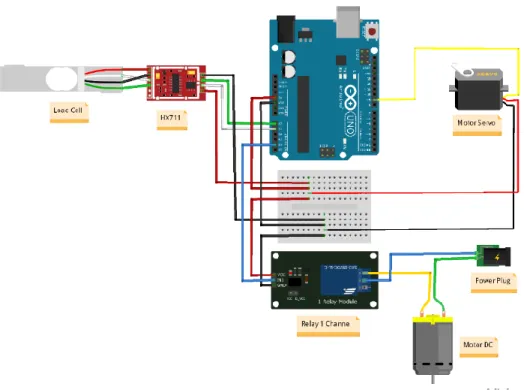
Abstrak— Indonesia merupakan negara agraris, komoditas pertanian menjadi komoditas unggulan di negeri ini, salah satu diantaranya adalah padi. Berdasarkan data rilis BPS pada tahun 2018 jumlah produksi padi Indonesia mencapai 56.537.774 ton, masih dibawah jumlah produksi padi China dan India per tahunnya. Dalam pengolahan hasil panen padi terdiri dari beberapa proses, salah satu prosesnya adalah tahapan pengemasan. Saat ini proses pengemasan gabah sebagian besar masih dilakukan secara manual oleh pekerja kilang padi, sehingga kurang efektif serta menguras banyak waktu dan tenaga. Penelitian ini menawarkan sistem otomasi yang dapat membantu para pekerja kilang padi dalam proses pengemasan gabah sesuai dengan massa yang diinginkan. Penelitian ini menggunakan beberapa komponen utama seperti sensor load cell HX711, motor DC dan motor servo, sistem dibangun menggunakan mikrokontroler ATmega 328p. Gabah yang telah dikeringkan di bawah teriknya sinar matahari akan dipindahkan melalui saluran pipa yang di dalamnya terdapat propeler yang digerakkan oleh motor DC menuju tempat penampungan awal, selanjutnya gabah akan dimasukkan ke dalam kantong plastik, di bawah dudukan kantong plastik ditempatkan sensor load cell HX711 untuk memonitor massa gabah, ketika massa gabah telah mencapai nilai yang diinginkan, maka aktuator yang berupa motor servo akan menutup jalur masuknya gabah ke kantong plastik. Hasil dari penelitian ini adalah suatu model prototipe sistem pengemasan gabah yang dapat dikembangkan lebih lanjut sehingga dapat diterapkan secara langsung untuk memudahkan para pekerja kilang padi.
Kata Kunci — Gabah, Pengemasan, ATmega328p, Load Cell, HX711 .
I. P ENDAHULUAN
Indonesia sebagai negara agraris merupakan salah satu dari tiga negara penghasil padi terbesar di dunia setelah China dan India. Jumlah produksi padi indonesia mencapai 56.537.774 juta ton per tahun[1], dibawah China dengan jumlah produksi pertahun mencapai 199,95 juta ton dan India 150,91 juta ton. Dari data tersebut di atas dapat kita ketahui jumlah hasil gabah per tahun indonesia masih jauh rendah dibandingkan Tiongkok dan India. Ada beberapa faktor yang mempengaruhi jumlah penghasilan gabah, antara lain adalah
ketersediaan lahan produktif untuk menanam padi, juga pengaruh hama yang menyerang tanaman yang bisa menyebabkannya gagal panen, dan faktor lainnya adalah cara pengelolaan tanaman padi dan hasil panen padi masih secara konvensional dan belum optimal.
Di era teknologi sekarang ini sektor pertanian, khususnya pertanian padi belum tersentuh teknologi secara keseluruhan, hal ini berdampak pada waktu produksi yang lebih lama yang mengakibatkan jumlah hasil produksi gabah tidak mengalami peningkatan secara signifikan. Sebagaimana kita ketahui penerapan serta pemanfaatan teknologi bertujuan untuk mempermudah dan mempercepat proses produksi, begitu pula penerapan dan pemanfaatan teknologi pada proses produksi hasil gabah [2].
Oleh karena itu pada penelitian ini penulis mengangkat judul “Perancangan Sistem Pengukuran Massa pada Pengemasan Gabah Berbasis Mikrokontroler ATmega328p”, pada penelitian ini penulis berusaha untuk memadukan teknologi khususnya sistem teknik kendali ke dalam proses produksi hasil panen padi yaitu pada proses pengemasan gabah. Dikarenakan sampai saat ini proses pengemasan gabah setelah pengeringan kadar ainya masih dengan cara konvensional.
II. T INJAUAN P USTAKA A. Proses Pengolahan Hasil Panen Padi
Beras merupakan makanan pokok masyarakat indonesia pada umumnya. Hal ini mengakibatkan permintaan akan hasil tanaman padi yang sangat tinggi. Ada beberapa proses yang akan dilakukan supaya padi dapat menjadi beras dan bisa dikonsumsi masyarakat, proses-proses tersebut antara lain [3].
1) Pemanenan Padi: Proses pemanenan padi akan
dilakukan ketika umur padi berkisar antara 110-120 hari umur
padi, umur pemanenan padi akan berbeda-beda tergantung
varietas padinya. Pemanenan dapat dilakukan dengan dua
cara yaitu secara manual maupun secara mekanis. Secara
manual ialah dengan menggunakan sabit, sedangkankan cara
mekanis ialah dengan menggunakan mesin pemotong padi
(Brinder atau Combine Harvesting).
Vol.4 No.4 2019 39 @2019 kitektro Gambar 1 Gabah yang telah dikeringkan.
2) Perontokan Gabah: Proses selanjutnya dari hasil tanaman padi adalah proses perontokan gabah. Proses ini ialah proses pemisahan gabah dari pohon padi atau yang nantinya disebut jerami. Ada beberapa cara yang dapat dilakukan untuk merontokkan gabah. Yang paling umum dilakukan ialah dengan diinjak dan dipukul. Dan bisa juga dengan menggunakan alat perontok gabah atau thresher.
3) Pembersihan Gabah: Pada proses ini ialah proses pembersihan gabah dari sisa-sisa pohon padi atau jerami. Ada beberapa cara untuk membersihkan gabah antara lain dengan dihembuskan dengan angin dan juga dengan diayak. Secara mekanis pembersihan gabah dapat dilakukan dengan menggunakan mesin blower.
4) Pengeringan Gabah: Gabah perlu dikeringkan supaya tidak mudah rusak ketika disimpan serta untuk mempertahankan mutunya. Ketika selesai dipanen kadar air di gabah berkisar antara 20 – 25 %, maka perlu dilakukan pengeringan hingga kadar air gabah hanya berkisar antara 14 % saja. Proses pengeringan biasanya memanfaatkan panas sinar matahari [4].
5) Penyimpanan Gabah: Tujuan utama gabah disimpan adalah untuk memperpanjang masa penyediaan bahan pangan.
Gabah yang akan disimpan harus mempunyai kadar air 14 %.
Ada dua cara penyimpanan gabah. Pertama disimpan di dalam silo, gabah akan ditempatkan di dalam suatu tempat tanpa pengemasnya. Dan yang kedua gabah disimpan dengan dimasukkan kedalam pengemasnya.
B. Mikrokontroler
Mikrokontroler adalah sebuah sistem komputer lengkap dalam satu serpih (chip). Mikrokontroler lebih dari sekedar mikroprosesor karena sudah berisikan ROM (Read-Only Memory), RAM (Random-Access Memory), beberapa modul masukan maupun keluaran, dan beberapa peripheral seperti pencacah/pewaktu, ADC (Analog to Digital converter), DAC (Digital to Analog converter) dan serial komunikasi. Berikut merupakan modul modul penting yang terdapat pada suatu mikrokontroller.
1) Processor Core: CPU dari sebuah controller.
Mengandung inti logika aritmatika, unit control, dan register.
2) Processor Core: CPU dari sebuah controller.
Mengandung inti logika aritmatika, unit control, dan register.
3) Digital I/O: Paralel digital I / O port adalah salah satu fitur utama dari mikrokontroler. Jumlah I / O pin bervariasi dari 3-4 hingga lebih dari 90, tergantung pada jenis kontroler.
4) Analog I/O: terlepas dari beberapa kontroler kecil, kebanyakan mikrokontroler telah terintegrasi analog / digital converter, yang berbeda dalam jumlah channels (2-16) dan resolusinya (8-12 bits). Modul analog umumnya juga memiliki fitur sebuah analog comparator. Dalam beberapa kasus, mikrokontroler mengandung digital/analog converter [4].
Gambar 2 Mikrokontroler ATmega38p
Salah satu jenis mikrokontroler adalah Arduino Uno.
Arduino Uno adalah board mikrokontroler berbasis microchip ATmega328P. Perangkat ini memiliki 14 pin input/output digital (6 di antaranya dapat digunakan sebagai output PWM), 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, dan tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, hanya perlu menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB atau adaptor AC ke DC atau baterai untuk menjalankannya [5]. Gambar Arduino Uno dapat dilihat pada Gambar.3
Gambar 3 Mikrokontroler Arduino Uno C. Load Cell HX711
Load cell merupakan sensor yang dirancang untuk mendeteksi tekanan atau berat sebuah beban, sensor load cell umumnya digunakan sebagai komponen utama pada sistem timbangan digital. Gambar load cell dapat dilihat pada Gambar 4.
Konfigurasi kabel load cell terdiri dari kabel bewarna
merah, hitam, hijau, dan putih. Kabel merah merupakan input
tegangan sensor, kabel hitam merupapan input ground pada
sensor, kabel hijau merupakan input positif dari sensor dan
kabel putih merupakan output ground dari sensor.
Vol.4 No.4 2019 40 @2019 kitektro Gambar 4 Sensor Load Cell
1) Prinsip kerja Load Cell: Selama proses penimbangan akan mengakibatkan reaksi terhadap elemen logam pada load cell yang mengakibatkan gaya secara elastis.
Gaya yang ditimbulkan oleh regangan ini dikonversikan kedalam sinyal elektrik oleh strain gauge (pengukur regangan) yang terpasang pada load cell. Prinsip kerja load cell berdasarkan rangkaian jembatan wheatstone [6]. Jika rangkaian jembatan wheatstone diberi beban,, maka nilai R pada rangkaian akan berubah, nilai R1 = R4 dan R2 = R3.
Sehingga membuat sensor load cell tidak dalam kondisi yang seimbang dan membuat beda potensial. Beda potensial inilah yang menjadi outputnya. Untuk mengitung Vout atau A seperti pada gambar, maka rumus yang digunakan adalah rumus (1).
𝑉
0= (𝑉
𝑠𝑥 (
𝑅1𝑅1+𝑅4
)) − (𝑉
𝑠𝑥 (
𝑅2𝑅2+𝑅3
)) (1) Secara teori, prinsip kerja load cell berdasarkan pada jembatan wheatstone dimana saat load cell diberi beban terjadi perubahan pada nilai resistansi, nilai resistansi R1 dan R3 akan turun sedangkan nilai resistansi R2 dan R3 akan naik.
Ketika posisi seimbang, Vout load cell = 0 volt, namun ketika nilai R1 dan R3 naik maka akan terjadi perubahan nilai Vout pada load cell. Pada load cell output data (+) dipengarui oleh perubahan resistansi pada R1, sedangkan output (-) dipengaruhi oleh perubahan resistansi R3.
Gambar 5 Rangkaian Load Cell tanpa beban
Gambar 6 Rangkaian Load Cell diberi beban
2) Modul Penguat HX711: HX711 adalah sebuah komponen terintegrasi dari “Avia Semiconductor”, HX711 presisi 24-bit analog to digital converter (ADC) yang didesain untuk sensor timbangan digital. HX711 adalah modul timbangan, yang memiliki prinsip kerja mengkonversi perubahan yang terukur dalam perubahan resistansi dan mengkonversinya kedalam besaran tegangan melalui rangkaian yang ada, modul melakukan komunikasi dengan komputer/mikrokontroler melalui TTL232 [7].
Gambar 7 Modul Penguat HX711 D. Motor DC
Motor listrik merupakan perangkat elektromagnetis yang dapat merubah energi listrik ke energi gerak (mekanik).
Energi mekanik ini dapat difungsikan sebagai pemutar fan.
Motor DC (Gambar 8) merupakan motor listrik yang memerlukan suplai tegangan arus DC atau searah pada kumparan motor untuk mengubah energi listrik menjadi energi mekanik atau gerak yang berupa putaran. Motor DC terdiri dari dua komponen utama. Yaitu stator bagian dari kumparan motor DC yang tidak berputar, dan rotor bagian dari motor DC yang berputar. Motor Listrik DC ini biasanya digunakan pada perangkat-perangkat Elektronik dan listrik yang menggunakan sumber listrik DC seperti Vibrator Ponsel, Kipas DC dan Bor Listrik DC [8].
Motor DC memiliki dua bagian penting. Bagian pertama adalah stator, yaitu bagian yang tidak berputar dan bagian kedua dinamakan rotor, yakni bagian yang berputar. Di rotor inilah, poros diletakkan. Di ujung poros dapat dipasang objek yang ingin diputar. Pengaturan kecepatan memegang peranan penting dalam motor searah karena motor searah mempunyai karakteristik kopel-kecepatan yang menguntungkan dibandingkan dengan motor lainnya. Untuk motor searah dapat diturunkan persamaan 2.
n =
𝑉𝑡−𝐼𝑎𝑅𝑎𝐶ɸ
𝑒 (2)
Dari persamaan tersebut, dapat dilihat bahwa kecepatan (n)
dapat diatur dengan mengubah-ubah besaran ɸ, 𝑅𝑎, atau 𝑉𝑡
[9].
Vol.4 No.4 2019 41 @2019 kitektro Gambar 8 Motor DC
Gambar 9 Motor Servo E. Motor Servo
Motor servo (Gambar 9) adalah suatu perangkat atau aktuator yang dapat berputar. Servomotor mempunyai keluaran shaft (poros). Poros ini dapat ditempatkan pada posisi sudut spesifik dengan mengirimkan sinyal kode pada saluran kontrol servomotor. Selama sinyal kode ada di saluran kontrol, servo akan tetap berada di posisi sudut poros. Bila sinyal kode berubah, posisi sudut poros berubah. Motor servo dirancang dengan sistem kontrol loop tertutup. Sehingga dapat diatur untuk menentukan dan memastikan putarannya sesuai dengan posisi sudut dari poros motor. Motor servo terdiri dari motor DC, beberapa gear, potensiometer dan rangkaian kontrol. Aplikasi servo banyak ditemui pada radio control pesawat terbang model (aeromodelling), mobil radio control, boneka mainan, dan tentunya robot [9].
F. Relay
Relay adalah bagian yang penting dari banyak sistem pengendali. Relay dapat digunakan untuk kendali jarak jauh dan untuk pengendali alat yang bersumber pada tegangan maupun arus tinggi dengan sinyal kendali tegangan dan arus rendah. Relay terdiri dari coil dan contact. coil adalah gulungan kawat yang mendapat arus listrik, sedang contact adalah sejenis saklar yang pergerakannya tergantung dari ada tidaknya arus listrik di coil. Terdapat 2 jenis contact yaitu Normally Open (kondisi awal sebelum diaktifkan open), dan Normally Closed (kondisi awal sebelum diaktifkan close).
Secara sederhana prinsip kerja dari relay adalah ketika Coil mendapat energi listrik (energized), akan timbul gaya elektromagnet yang akan menarik armature yang berpegas, dan contact akan menutup [10].
Gambar 10 Relay
Gambar 11 Propeller G. Propeller
Propeller (Gambar 11) merupakan sekelompok sayap berputar yang dibentuk bengkok, yang ditujukan agar menciptakan arah dari resultan gaya angkat yang menuju ke depan. Pada umumnya propeller terdiri dari dua atau lebih baling yang dihubungkan ke central hub yang merupakan bagian dimana baling – baling pesawat tersambung. Propeller berfungsi untuk mengubah gaya rotasi dari mesin menjadi gaya propulsif sebagai gaya dorong (Thrust) untuk pesawat.
Penjelasan secara detail tentang teori bagaimana propeller bekerja sehingga menghasilkan thrust atau gaya dorong sangatlah rumit dan kompleks. Hal ini dikarenakan propeller merupakan sayap yang berputar dengan perubahan bentuk airfoil yang sulit untuk dianalisa. Propeller merupakan sistem propulsi yang secara umum digunakan pada pesawat tanpa awak. Berdasarkan praktik di lapangan, propeller merupakan penyumbang kebisingan terbesar pada pesawat. Dimana kebisingan ini merupakan akumulasi dari kebisingan yang bersumber dari bending Vibration , mekanisme pressure field serta adanya turbulensi dan vorteks udara.
H. Kajian Relevan
Kajian yang pernah diteliti sebelumnya yang berhubungan dengan penelitian ini adalah penelitian yang dilakukan Sony P Aquino dengan judul penelitian adalah “Design, Fabrication and Performance Evaluation of Mobile Engine- Driven Pneumatic Paddy Collector”. Penelitian ini berfokus pada pendesain, pembuatan serta pengevaluasian performa mesin pengumpul padi. Keefektifan sistem yang dibuat adalah 99,33% dengan kapasitas pengumpulan sebesar 2685 kg/jam.
Namun biaya yang diperlukan untuk pembuatan mesin ini
sangatlah mahal yaitu 62,829.25 Peso [11]. Pada penelitian ini
juga tidak melakukan penimbangan dan menyesuaikan
jumlah massa padi uuntuk setiap karungnya.
Vol.4 No.4 2019 42 @2019 kitektro
MOTOR DCHX711
MIKROKONTROLER
MOTOR SERVO RELAY
LOAD CELL
Gambar 12 Diagram prinsip kerja sistem
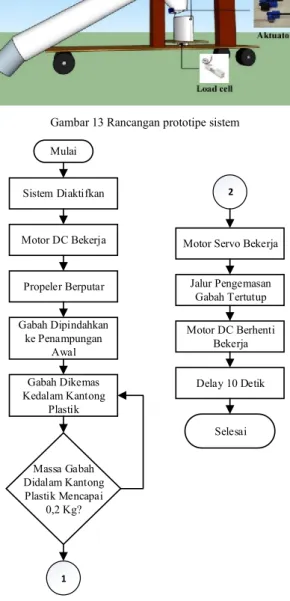
Gambar 13 Rancangan prototipe sistem
MulaiSistem Diaktifkan
Motor DC Bekerja
Propeler Berputar
Gabah Dipindahkan ke Penampungan
Awal Gabah Dikemas Kedalam Kantong
Plastik
Motor Servo Bekerja
Jalur Pengemasan Gabah Tertutup
Motor DC Berhenti Bekerja Delay 10 Detik
Selesai
Massa Gabah Didalam Kantong Plastik Mencapai
0,2 Kg?
1
2