PENGAPLIKASIAN AUTOPILOT PADA PESAWAT UAV SKY
KING UNTUK MISI MONITORING
Skripsi
Untuk Memenuhi Persyaratan Mencapai Derajat Sarjana Strata 1
Disusun Oleh :
MULTAZAM
11050103
TEKNIK PENERBANGAN
SEKOLAH TINGGI TEKNOLOGI ADISUTJIPTO
YOGYAKARTA
Skripsi
Untuk Memenuhi Persyaratan Mencapai Derajat Sarjana Strata 1
Disusun Oleh : MULTAZAM
11050103
JURUSAN TEKNIK PENERBANGAN SEKOLAH TINGGI TEKNOLOGI ADISUTJIPTO
YOGYAKARTA 2016
HALAMAN
PENGESAHAN
PENGAPLIKASIAN AUTOPILOT PADA PESAWAT UAV SI(Y KING
UNTUK MISI MONITORING
Disusun oleh :
Multazam
NIM:11050103
Telah dipertahankan di depan tim penguji Skripsi pada tanggal 5 April 2016 dan dinyatakan telah memenuhi syarat guna memperoleh gelar Sarjana Teknik.
Dosen Pembimbing Pernbimbing I Ponbimbing II Dosen Penguji Ketua Penguji Penguji I Penguji
II
Rully Medianto, ST., MT.M. Jalu Pumomo., ST., M.Eng.
M. Ardi Cahyono., ST., M.T.
Karseno KS, INZ., SE.,MM
Ika Suwarni., ST., MT
ffi
,^&b,
April2016 Jurusan/
ST., MT. NIK.050955iv
MOTTO
Man jadda wajadda
Don’t stop when tired, just stop if done
“ YAKIN, IKHLAS, ISTIQOMAH “
science without religion is lame
religion without science is blind
-
Albert Einstein
v takkan terselesaikan dengan baik.
Untuk alm. ayah dan ibunda tercinta, yang selalu memberikan dorongan, semangat, serta doa-doanya yang sangat mustajab, besarnya kasih dan sayang yang kalian berikan tidak tergantikan dengan apapun.
Untuk abang dan adik-adikku tersayang, terima kasih atas segala doa, dan terus memberikan semangat kepadaku dalam menyelesaikan kuliah. Untuk seluruh keluarga besar alm. Zakaria yunus (halati, om apit, cek
uning, cek jan, ma tuti, tante ela, affan, echa, dan sepupuku lainnya) atas dorongan dan semangat kalian skripsi ini dapat selesai.
Untuk My Team Sky King dan Sky Queen Akhirnya aku sadari perjalanan hidupku tak lengkap tanpa kalian, perjuanganku terasa lengkap saat kutahu kalianlah yang selalu ada untuku, terima kasih atas support dan perhatian yang telah diberikan selama ini.
Untuk D’Gallzkoff atau biasa disebut DG/DEGEH/D’CANGKOK/D’glak-glok/ yang selalu memberikan motivasi dalam mengerjakan skripsi ini dan selalu bertanya kapan selesai skripsi.
Untuk annisa tyas rahmawati yang selalu setia dan membimbing sampai memberikan motivasi untuk mengerjakan skripsi ini.
Untuk keluarga pak anton, yang selalu bersedia untuk menjadi tempat saya belajar aeromodelling.
Untuk TP-C 2011 yang selalu membantu, dan memberikan semangat nya kepada kami yang sedang mengerjakan skripsi, semoga kelak kita akan sukses bersama.
Untuk keluarga muh. Ichsan yang sudah saya anggap keluarga sendiri dan selalu ada sampai terus memberikan doa, dan semangat yang tiada henti.
vi
KATA PENGANTAR
Segala puji dan syukur kehadirat Allah SWT atas segala berkat dan karunia-Nya, yang telah memberikan nikmat sehat, kecerdasan, ketekunan, dan kesabaran kepada penulis, sehingga penulis dapat menyelesaikan Skripsi ini dengan penuh makna.
Skripsi ini dibuat sebagai salah satu syarat kelulusan Strata 1 di kampus tercinta STT Adisutjipto Yogyakarta. Topik yang diangkat dalam skripsi ini yaitu “Pengaplikasian Autopilot Pada Pesawat Uav Sky King Untuk Misi Monitoring”.
Shalawat serta salam semoga senantiasa tercurah kepada junjungkan kita, Nabi Besar Muhammad SAW, yang telah memberi contoh tauladan bagi umat dalam kehidupan keluarga, bermasyarakat dan bernegara.
Skripsi ini dapat diselesaikan tidak terlepas dari banyak pihak yang telah membantu penulis baik secara materil maupun spiritual beserta saran-saran, pengarahan serta koreksi yang sangat bermanfaat dalam membimbing penulis sampai dengan terselesaikannya penulisan Skripsi ini dengan baik.
Untuk itu pada kesempatan ini juga, penulis ingin mengucapkan terima kasih yang sebesar-besarnya kepada :
1. Keluarga tercinta. Alm. Ayahanda, Ibunda, Abang dan adik-adikku yang telah memberikan dukungan berupa materil, spiritual, serta do’a restu. Ananda takkan seperti ini tanpa doa Alm. ayahanda & Ibunda yang luar biasa dasyatnya, kalian semua adalah inspirasi dan penyemangat bagi penulis dalam menyelesaikan skripsi ini
2. Bapak Marsekal Muda TNI (Purn) Dr (kan) Ir.Drs.T Ken Darmastono, M.Sc, selaku Ketua Sekolah Tinggi Teknologi Adisutjipto Yogyakarta.
3. Bapak Rully Medianto, S.T.,M.T., selaku Ketua Program Studi Teknik Penerbangan Sekolah Tinggi Teknologi Adisutjipto Yogyakarta, sekaligus sebagai dosen pembimbing I penulis.
4. Bapak M. Jalu Purnomo, ST.,M.Eng. selaku pembimbing II yang telah memberikan banyak bantuan kepada penulis dalam menyelesaikan skripsi ini.
vii
5. Bapak M.Ardi Cahyono,ST.MT., selaku dosen yang senantiasa memberikan kritik, saran dan support sehingga sangat membantu penulis dalam menyelesaikan skripsi ini.
6. Bapak-bapak dosen penguji atas pertanyaan-pertanyaan dan masukannya yang mana sangat bermanfaat bagi penulis untuk kedepannya.
7. Annisa Tyas Rahmawati yang selalu memberiku semangat untuk tetap melangkah.
8. Teman-teman seperjuangan TP’11, terimakasih kalian sudah jadi teman yang baik buatku selama menapaki bangku perkuliahan.
9. Teman-teman seperjuangan Sky King, SP-25 dan Hud-hud yang senantiasa selalu bersama di lab Nurtanio dalam mengerjakan proyek skripsi.
10. Dan semua pihak yang telah banyak membantu penulis, yang tidak dapat disebutkan satu per satu.
Penulis menyadari bahwa dalam penyusunan Skripsi ini, masih terdapat banyak kekurangan dan keterbatasan, oleh karena itu saran dan kritik yang membangun sangat dibutuhkan penulis untuk dapat menyempurnakannya dimasa yang akan datang. Semoga apa yang disajikan dalam laporan ini dapat bermanfaat bagi penulis sendiri, teman-teman maupun pihak lain yang berkepentingan.
Yogyakarta, Februari 2016
viii
PENGAPLIKASIAN AUTOPILOT PADA PESAWAT UAV SKY KING UNTUK MISI MONITORING
Oleh : MULTAZAM
11050103 ABSTRAK
Unmanned Aerial Vehicle (UAV) Sky King merupakan pesawat yang di dalamnya tidak mengangkut awak atau pilot, yang dikendalikan dari jarak jauh. Pesawat ini memiliki tujuan untuk dapat terbang dengan menggunakan sistem autopilot dengan software dan hardware ardupilot, dan dapat digunakan sebagai pesawat monitoring lalu lintas dan perkebunan, pada saat menggunakan autopilot pesawat diatur dengan menggunakan Software dan Hardware ardupilot, ardupilot adalah pengendali yang dapat diprogram untuk memandu pergerakkan pesawat sejenis UAV. Untuk dapat melakukan mode autopilot sebelumnya dilakukan tahap pengaplikasian ardupilot dengan langkah-langkah melakukan installasi software dan hadware lalu hubungkan software dan hardware dengan kabel USB dan masukkan data penerbangan, kemudian melakukan uji terbang.
Pesawat UAV Sky King adalah jenis pesawat fixed wing dengan karakteristik slow flyer memiliki span 1,61 m panjang fuselage 1,24 m dan massa 2 kg, pesawat UAV Sky King diproyeksikan untuk misi monitoring dengan menggunakan kamera dan menempuh jarak 2,9 Km, jarak ini sesuai dengan misi penerbangan yang dibutuhkan untuk mengikuti waypoint, dan hasil monitoring yang didapat yaitu berupa video pemantauan lalu lintas dan perkebunan.
Pada perhitungan analitik pesawat Sky King dapat menempuh jarak 16,750 Km dan lama terbang 197 menit. Pesawat UAV Sky King dapat mengikuti waypoint sejauh 2,9 km dengan diameter waypoint 10 m dan dapat terbang dengan kecepatan ±10 km/h, pada saat menggunakan mode autopilot PID throttle max di setting 100% lalu pada cruise 45% dan pada airspeed setting cruise 10 m/s FBW min 7,0 % dan FBW max 19,0 % dan pengaturan yang lain dilakukan oleh sistem dengan otomatis saat APM II pertama sekali di hidupkan dan akan otomatis melakukan demo untuk hasil PID yang lainnya, pesawat Sky King berhasil menjalankan misi dengan persentase sebesar 95,34 %
ix LEMBAR PENGESAHAN...ii SURAT PERNYATAAN...iii MOTTO...iv HALAMAN PERSEMBAHAN...v KATA PENGANTAR...vi ABSTRAK...viii DAFTAR ISI...ix DAFTAR GAMBAR...xi DAFTAR TABEL...xiii DAFTAR LAMPIRAN………...xiv DAFTAR SINGKATAN………..xv DAFTAR NOTASI...xvi BAB I PENDAHULUAN 1.1 Latar Belakang...1 1.2 Rumusan Masalah...3 1.3 Tujuan Penulis...3 1.4 Batasan Masalah ...3 1.5 Manfaat Penelitian...3 1.6 Sistem Penulisan……...4
BAB II TINJAUAN PUSTAKA 2.1 Kajian Pustaka………...6
2.2 Unmanned Aerial Vehicle (UAV)…...9
2.3 Autopilot………...10
2.4 Ardupilot Mega APM 2…...12
2.5 Sistem Kontrol Pada Pesawat Sky King...17
2.6 Global Positioning System (GPS)….……….23
x
2.6.2 Bagian Angkasa………...23
2.6.3 Bagian Pengguna………..24
2.7 Bidang Kendali Pada Pesawat UAV…...25
2.8 Konfigurasi Pesawat Platform UAV Sky King……….27
BAB III METODE PENELITIAN 3.1 Teknik Pengumpulan Data...30
3.2 Jenis Data………...31
3.3 Sumber Data………... 31
3.4 Block Diagram…...…32
3.5 Perencanaan Penelitian Pesawat UAV Sky King...33
3.6 Misi Penerbangan Sky King………...33
3.7 Memlih Jenis dan Dimensi Pesawat Sky King………..……34
3.8 Data Prestasi Terbang………..………..36
3.8.1 Jarak Jelajah dan Lama Waktu Terbang………..37
3.9 Hardware Ardupilot………...40
3.10 Kalibrasi……….41
3.10.2 Kalibrasi RC Timer………..…….41
3.10.3 Kalibrasi Ardupilot………...……….42
BAB IV PEMAHASAN DAN HASIL AKHIR 4.1Pengaplikasian Autopilot Pada Pesawat UAV Sky King...43
4.1.1Perancangan Autopilot Pada Software dan HadwareArdupilot..43
4.1.2 Instalasi Software...43
4.1.3 Instalasi Hardware...48
4.2 Persentase Waypoint..……….…51
4.3 Hasil Uji Terbang Sky King dengan Menggunakan Ardupilot…...52
4.3 Hasil Monitoring………...58
BAB V PENUTUP 5.1 Kesimpulan...62
5.2 Saran...63
xi
Gambar 2.2 Skema autopilot...11
Gambar 2.3 Jenis-Jenis Autopilot pada UAV...12
Gambar 2.4 Board AMP 2...13
Gambar 2.5 Tampilan Software AMP 2...14
Gambar 2.6 Transmitter 6 Channel...19
Gambar 2.7 Turnigy Motor...20
Gambar 2.8 Batter...21
Gambar 2.9 Receiver...21
Gambar 2.10 Servo Motor...22
Gambar 2.11 Propeller tipe fixed pitch...22
Gambar 2.12 Electronic Speed Control (ESC)...22
Gambar 2.13 Bidang Kendali dan Sumbu Pergerakan Pesawat UAV...25
Gambar 2.14 Bidang Kendali Dan Sumbu Pergerakan Pesawat UAV...26
Gambar 2.15 Konfigurasi Sayap...27
Gambar 2.16 Konfigurasi Tail...28
Gambar 2.17 Konfigurasi Engine...29
Gambar 2.18 Propeller Tipe Fixed Pitch...29
Gambar 3.1 Blok Diagram Penelitian...32
Gambar 3.2 Dimensi pesawat Sky King...34
Gambar 4.1 Port USB Hub Pada Board APM II... 43
Gambar 4.2 Install Software...44
Gambar 4.3 Menu Setting Basic Tuning...46
Gambar 4.4 Rc Transmitter...47
Gambar 4.5 Data Penerbangan Waypoint...47
Gambar 4.6 Posisi Board AMP II...48
Gambar 4.7 Posisi Board AMP II Pada Sky King...48
Gambar 4.8 Port Kabel Jumper Pada AMP II...49
xii
Gambar 4.10 Tombol Connect Dan Pemilihan Telemetry...50
Gambar 4.11 Tunning Flight Modes...53
Gambar 4.12 Waypoint Yang Dilewati Pesawat Sky King...55
Gambar 4.13 Data Penerbangan Melalui Google Earth...56
Gambar 4.14 Data Penerbangan Waypoint...56
Gambar 4.15 Data Penerbangan Mode Manual...57
Gambar 4.16 Data Penerbangan Mode FBW...57
Gambar 4.17 Data Penerbangan Waypoint...58
Gambar 4.18 Hasil Monitoring I (lapangan goa selarong)...59
Gambar 4.19 Hasil Monitoring II (pemandangan sekitar goa selarong)...60
Gambar 4.20 Hasil Monitoring III (jalan menuju goa selarong)...60
Gambar 4.21 Hasil Monitoring IV (jalan menuju goa selarong)...61
xiii
Tabel 2.2 Spesifikasi Board AMP 2………..13 Tabel.3.1 konfigurasi pesawat Sky King………...35 Tabel 3.2 Spesifikasi Pesawat Sky King………....35
xiv
DAFTAR LAMPIRAN
Lampiran. 1 Tabel Persentase Waypoint……….………..66 Tabel Persentase Waypoint………....67
xv
m Meter
cm Centi meter
kg Kilogram
gr Gram
mm2 Mili meter Kuadrat
m/s Meter Per Second
m2 Meter kuadrat
Km Kilometer
Kv Kilovolt
N Newton
mm2 Mili meter Kuadrat
m/s Meter Per Second
m2 Meter kuadrat
MP Mega Pixel
MHz Megahertz
mAh Milliampere Hours
Kg/m3 Kilogram per meter kubik
UAV Unmanned Aerial vehicle
AMP II Ardupilot Mega Planner II
xvi
DAFTAR NOTASI
NOTASI DEFINISI SATUAN
l fuselage lenght m AR Aspect ratio We Empty weight kg Sw Wing area m2 b Span m c Chord m cr Chord root m ct Chord tip m
E Beda potensial (daya)
Eficiency propeler
W Berat N
L Lift N
D Drag N
Q0 Muatan battery pada awal terbang
Q1 Muatan battery pada akhir flight
S Span m
V Kecepatan m/s
ρ Kerapatan/ Density kg/m3
WTO Maximum take-off weight kg
η Efisiensi
xvi DAFTAR SINGKATAN SINGKATAN DEFINISI m Meter cm Centi meter kg Kilogram gr Gram
mm2 Mili meter Kuadrat
m/s Meter Per Second
m2 Meter kuadrat
Km Kilometer
Kv Kilovolt
N Newton
mm2 Mili meter Kuadrat
m/s Meter Per Second
m2 Meter kuadrat
MP Mega Pixel
MHz Megahertz
mAh Milliampere Hours
Kg/m3 Kilogram per meter kubik
UAV Unmanned Aerial vehicle
AMP II Ardupilot Mega Planner II
xvii
DAFTAR NOTASI
NOTASI DEFINISI SATUAN
l fuselage lenght m AR Aspect ratio We Empty weight kg Sw Wing area m2 b Span m c Chord m cr Chord root m ct Chord tip m
E Beda potensial (daya)
Eficiency propeler
W Berat N
L Lift N
D Drag N
Q0 Muatan battery pada awal terbang
Q1 Muatan battery pada akhir flight
S Span m
V Kecepatan m/s
ρ Kerapatan/ Density kg/m3
WTO Maximum take-off weight kg
η Efisiensi
1 1.1 Latar Belakang
Seiring berkembangnya ilmu dan teknologi dalam segala macam aspek dimana dunia penerbangan yang di mediai oleh kedirgantaraan juga termasuk ke dalamnya.Dengan berkembangnya ilmu dan teknologi pada zaman modern seperti sekarang ini fungsi pesawat tidak hanya terbatas pada pesawat sipil berpenumpang, pesawat kargo, dan militer saja, akan tetapi juga di fungsikan sebagai pesawat tanpa awak dengan berbagai macam misi, antara lain: pengintaian, mengambil foto pemandangan dari atas, memantau lalu lintas, memantau suatu keadaan/kejadian/bencana, dll. Semua jenis pesawat tanpa awak ini di desain oleh pembuatnya dengan berbagai macam jarak jangkauan, baik itu dekat jauh, rendah, maupun tinggi dan dikendalikan oleh radio control.
Dalam dunia kedirgantaran memiliki beberapa jenis aktifitas seperti menciptakan, mempelajari/mendalami ilmu maupun teknologi pada suatu pesawat terbang, menerbangkan pesawat, ada pula sebagai sarana olahraga maupun hanya sebatas hobi, salah satu cabang olahraga yang dimiliki oleh dunia kedirgantaraan adalah aeromodelling. Aeromodelling merupakan kegiatan merancang, membuat dan menerbangkan pesawat model hasil karya manusia yang memiliki hubungan dengan ilmu aerodinamika, struktur material pesawat, sistem kendali terbang, dan prestasi terbang.
Dari aspek aerodinamika pesawat UAV dan pesawat terbang sipil maupun militer memiliki konsep sama yaitu thrust, dan lift yang lebih besar dari pada weight dan drag, namun ada juga hal yang membedakan pesawat model dan pesawat terbang sipil/militer antara lain pada saat manufaktur, pada pesawat model menggunakan kayu balsa, komposit, plastic, dan fiber/carbon, namun pada pesawat terbang sipil/militer menggunakan allumunium alloy, komposit, dll.
Pada pembahasan ini, pesawat yang akan digunakan adalah pesawat UAV jenis small unmanned aircarft, dengan menggunakan electric dan motor, desain
2
terdiri dari 2 bagian utama, yaitu: fuselage dan wing. Pesawat UAV ini di desain lebih berat dari udara (heavier than air) dan manufaktur yang digunakan pada fuselage dan wing menggunakan kayu balsa dan komposit. Pesawat model ini memiliki misi untuk memantau lalu lintas dengan kemampuan terbang ±45 menit di udara atau jarak pendek.
Pesawat UAV ini menggunakan type flying wing, dimana bentuk dari pesawat flying wing menyerupai dua wing pesawat yang menyatu, dan juga pesawat UAV yang berjenis small unmanned aicraft ini memiliki posisi wing pada bagian atas fuselage atau disebut juga high wing aircraft model, dipilihnya posisi high wing aircraft agar pesawat dapat terbang dengan kecepatan rendah sehingga pesawat memiliki tingkat karakteristik kestabilan yang tinggi, dan dapat memenuhi karakteristik dari misi pesawat tersebut.
Pesawat UAV ini dikendalikan oleh pilot dengan pengendalian jarak jauh menggunakan radio control dan bantuan software ardupilot, yang berfungsi untuk menghasilkan pesawat UAV yang mudah di kontrol dan di gerakkan dengan gaya take off, pitch, yaw, roll, dan landing untuk lebih stabil saat di terbangkan.
Software ardupilot merupakan sebuah software pengendali yang dapat diprogram untuk memandu pesawat sejenis UAV dengan menentukan point-point terlebih dahulu (way point following), software ardupilot ini memiliki sifat yang fleksibel dan mudah selain itu juga software ardupilot ini bersifat open source. Open source adalah software yang dapat dikembangkan kembali oleh penggunanya.
Untuk meningkatkan kinerja pesawat UAV small unmanned aircraft ini terbang maka dibutuhkan penambahan teknologi yang akan dipasang pada pesawat model tersebut berupa software ardupilot. Sehingga skripsi ini berjudul “PENGAPLIKASIAN AUTOPILOT PADA PESAWAT UAV SKY KING UNTUK MISI MONITORING”.
1.2 Rumusan Masalah
Berdasarkan latar belakang dan pokok permasalah diatas, maka adapun masalah yang dapat dirumuskan adalah sebagai berikut:
1. Bagaimana cara mendapatkan hasil terbang pesawat UAV Sky King dengan menggunakan software ardupilot ?
2. Bagaimana cara mengetahui tahap pengaplikasian ardupilot pada pesawat UAV Sky King?
3. Bagaimana cara melakukan misi monitoring pesawat UAV Sky King?
1.3 Tujuan Masalah
Adapun tujuan penulis melakukan penelitian dengan judul “aplikasi autopilot pada pesawat UAV Sky King untuk misi monitoring” adalah sebagai berikut:
1. Untuk mendapatkan hasil terbang pada pesawat Sky King dari pengaplikasikan ardupilot.
2. Untuk mengetahui tahap pengaplikasian ardupilot pada pesawat UAV Sky King.
3. Untuk dapat melakukan misi monitoring.
1.4 Batasan Peneliti
Batasan masalah pada skripsi ini adalah sebagai berikut:
Pembahasan dan hasil dari penelitian pada skripsi ini hanya di fokuskan pada hasil terbang aktual pesawat UAV Sky King dengan menggunakan software ardupilot.
1.5 Manfaat Peneliti
Manfaat peneliti dari penulisan skripsi ini yaitu dapat memberikan manfaat bagi:
4
Penelitian ini dapat dipergunakan sebagai sarana untuk menambah wawasan, pengetahuan, dan pengalaman penulis, dan juga sebagai penerapan teori-teori yang didapat dibangku kuliah dan dapat menjadi bekal ilmu khususnya pada teknologi penerbangan kedepannya, dan juga untuk memberikan gambaran pada pesawat model sejenis lainnya untuk menggunakan software ardupilot.
2. Civitas Akademika
Hasil penelitian ini bermanfaat sebagai pengembangan ilmu dan informasi di bidang kedirgantaraan khususnya pada pesawat terbang model dan sejenisnya.
1.6 Sistem Penulisan
Untuk mempermudah memahami pembahasan pada penyusunan skripsi ini, maka diperlukan sistematika penulisan untuk memperoleh suatu gambaran yang lebih jelas mengenai tujuan penulisan skripsi ini.
Adapun sistematika dalam penulisan skripsi ini adalah sebagai berikut :
BAB I PENDAHULUAN
Pada bab ini Berisikan mengenai latar belakang, rumusan masalah, batasan masalah, tujuan penulisan, dan manfaat penelitian, serta sistematika penulisan.
BAB II TINJAUAN PUSTAKA
Pada bab ini Berisikan mengenai kajian-kajian secara teoritis yang berkaitan dengan permasalahan yang diangkat ke dalam penulisan skripsi ini dengan menggunakan reffernsi dari penelitia terdahulu, dan teori pendukung lainnya.
BAB III METODE PENELITIAN
Pada Bab ini menjelaskan mengenai metode yang digunakan dalam melakukan penelitian untuk penyusunan skripsi, meliputi objek penelitian, alur penelitian dan metode pengumpulan data penelitian.
BAB IV PEMBAHASAN DAN HASIL AKHIR
Pada Bab ini menjelaskan mengenai hasil prestasi terbang pada pesawat Sky King menggunakan software ardupilot.
BAB V PENUTUP
Pada BAB ini berisikan mengenai kesimpulan, saran serta melampirkan semua hasil penelitian yang dilakukan.
6 BAB II
TINJAUAN PUSTAKA
2.1 Kajian Pustaka
Kajian pustaka yang diambil untuk menjadi pembanding pada skripsi ini yaitu penelitian yang dilakukan oleh beberapa peneliti terlebih dahulu, dari data yang didapat pada melakukan metode penelitian pada skripsi ini yaitu penelitian yang dibuat oleh mahasiswa STTA Galih Wicaksono dengan judul skripsi “Aplikasi Pengendalian Terbang Otomatis Modus Stabilize Pada Platform SSU-03 Menggunakan Software Ardupilot” ini membahas tentang pengendalian pesawat UAV dengan penerapan mode stabilize. Pada skripsi ini terdapat beberapa kendala yang dialami peniliti seperti kurangnya koneksi GPS, sehingga pesawat tidak tepat mengikuti jalur yang telah di input, Diameter waypoint yang sangat besar,sehingga pesawat terlalu cepat mengambil sikap berikutnya, Pemasangan posisi board yang tidak lurus, Pesawat ini melakukan metode take off hand lauch sehingga pesawat mengalami kesulitan menentukan sikap steady, sehingga penelitian ini Melakukan uji terbang sampai 3 kali, karena masih mengalami masalah yang sama.
Pada penelitian Autopilot yang digunakan pada pesawat Platform UAV yang disusun oleh mahasiswa M. Fajar Adnan Achkam mahasiswa STTA, dari hasil yang didapatkan pada saat melakukan field research dan library search bahwa pesawat UAV terdapat kekurangan seperti :
- Kurangnya koneksi GPS, sehingga pesawat tidak tepat mengikuti jalur yang telah di input.
- Mode stabilization, pada saat uji terbang pilot mengaktifkan mode stabilization pada saat memindahkan panel pengaktifan pesawat kehilangan sikap sehingga stall.
- Pada saat uji terbang menggunakan pengaturan PID pitch & roll sebesar 2% pada controller sehingga pesawat tidak cepat tangkap dalam melakukan sikap berikutnya.
terbang otomatis mode waypoint sejauh 1.5 km pada Platform UAV menggunakan Software ardupilot.
Dalam penelitian Rio Hariyoso Midu Hermawan mahasiswa Sekolah Tinggi Teknlogi Adisutjipto juga menerapkan terbang secara Autopilot dengan menggunakan Pesawat UAV II. Pesawat ini adalah jenis pesawat fixed wing dengan karakteristik slow flyer (trainer glider). Pada penelitian ini ada beberapa kendali yang didapatkan yaitu :
- Pada tahap uji terbang I misi melakukan holding masih tidak berhasil. - Terjadi kesalahan pembuatan flight plan sehingga pesawat tidak
mengikuti perintah holding.
- Kurangnya point yang diinput pada titik holding.
Judul skripsi yang diambil dari Platform UAV II adalah “Perancangan Dan Aplikasi Pengendalian Terbang Otomatis Mode Holding Point Pada UAV Menggunakan Ardupilot”.
Dari 3 kajian pustaka yang didapat maka penulis dapat memahami kekurangan pada Software dan hardware yang ada pada ardupilot sehingga nantinya dapat menghindari beberapa kesalahan yang ada dan dapat meningkatkan tingkat keberhasilan sistem Autopilot pada pesawat penulis. Adapun spesifikasi dari pesawat pembanding sebagai berikut:
8
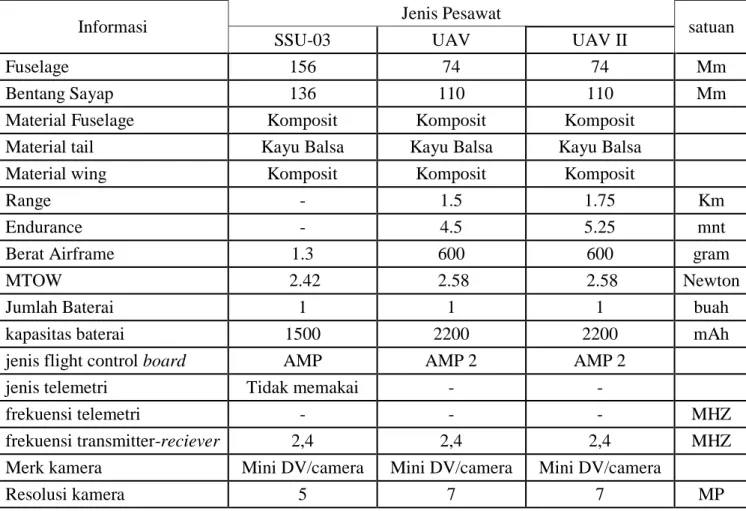
Tabel 2.1 Spesifikasi pesawat pembanding
Sumber: Pengolahan Data Penulis
Informasi Jenis Pesawat satuan
SSU-03 UAV UAV II
Fuselage 156 74 74 Mm
Bentang Sayap 136 110 110 Mm
Material Fuselage Komposit Komposit Komposit
Material tail Kayu Balsa Kayu Balsa Kayu Balsa
Material wing Komposit Komposit Komposit
Range - 1.5 1.75 Km
Endurance - 4.5 5.25 mnt
Berat Airframe 1.3 600 600 gram
MTOW 2.42 2.58 2.58 Newton
Jumlah Baterai 1 1 1 buah
kapasitas baterai 1500 2200 2200 mAh
jenis flight control board AMP AMP 2 AMP 2
jenis telemetri Tidak memakai - -
frekuensi telemetri - - - MHZ
frekuensi transmitter-reciever 2,4 2,4 2,4 MHZ
Merk kamera Mini DV/camera Mini DV/camera Mini DV/camera
2.2 Unmanned Aerial Vehicle (UAV)
Unmanned Aerial Vehicle (UAV) merupakan pesawat terbang yang di dalamnya tidak mengangkut awak atau pilot, namun dapat dikendalikan dari jarak jauh. Pesawat terbang ini dapat digunakan untuk berbagai kepentingan militer dan sipil, antara lain untuk mengintai daerah musuh, survey lahan baik itu pertanian, perkebunan dan pertambangan serta melakukan misi penyelamatan di daerah bencana. UAV memiliki beberapa kelebihan dibandingkan dengan pesawat terbang konvensional, yaitu peningkatan kemampuan manuver, biaya pengoperasian dan perawatan yang rendah serta mengurangi resiko kecelakaan terhadap awak pesawat terbang.
Gambar 2.1 Pesawat UAV Surveilance
(sumber: www.AIR_UAV_Skylark-I-LE_from_Belowg.com)
Sistem kendali otomatis banyak dipakai pada sistem kendali pesawat terbang UAV. Untuk membuat sistem kendali otomatis pesawat terbang UAV dibutuhkan beberapa persyaratan, yaitu sebuah Platform yang merupakan
10
kombinasi hardware dan Software, dan metode control. Platform harus memenuhi parameter-parameter, antara lain pengukuran orientasi pesawat terbang dan penentuan koordinat pesawat terbang. Kemudian metode control harus memiliki respon yang baik terhadap masukan yang dimasukkan. Salah satu sistem kendali yang sering dipakai pada peluru kendali adalah tracking system, sistem ini dipakai untuk mengejar target posisi, selain itu juga diaplikasikan untuk melakukan pemetaan, monitoring dll.
UAV syarat utamanya ialah dapat terbang dan dikendalikan oleh pilot di darat dari jarak jauh. Untuk itu flight controller pada pesawat terbang UAV harus dapat dihubungkan dengan controller di darat agar pengaturan flight controller dapat dilakukan secara real time.
Saat ini UAV dapat diklasifikasikan menjadi bermacam-macam kritera. Diantaranya berdasarkan dimensi, lama terbang, UAV untuk sipil maupun militer, dan ada yang berdasarkan misi dari pesawat tersebut. Dalam pemilihan dimensi bisa langsung ditinjau dan ditentukan dari misi pesawat tersebut. Untuk misi monitoring klasifikasi yang paling sesuai dan sesuai dengan keinginan pada saat melakukan field research, library research, dan melihat dari perancangan sampai dengan prestasi terbang pesawat adalah kiteria yang dimiliki oleh jenis SUA (Small Unmanned Air vehicle). Beberapa data ini diambil dari buku unmanned aircraft dan penyesuaian dari penelitian kakak tingkat sebelumnya.
2.3 Autopilot
Autopilot adalah sistem kendali otomatis, tanpa campur tangan manusia (pilot) yang mampu mengendalikan pesawat terbang dengan aman. Autopilot sebenarnya merupakan sebuah sistem komputasi yang ditanamkan kedalam flight controller sebuah pesawat terbang yang bekerja berdasarkan masukan data dari instrument-instrument pesawat terbang tersebut kemudian diterjemahkan dan dikoreksi oleh sebuah Software. Keluaran dari Software yang merupakan datavalid kemudian dijadikan referensi untuk terbang. Flight controller selanjutnya memerintahkan instrument-instrument penggerak control surface pesawat terbang yang telah terhubung dengannya agar bekerja berdasarkan
parameter-parameter tersebut.
Masukan data berupa data temperatur udara, tekanan udara, ketinggian, kecepatan, arah, sudut terbang dan sebagainya. Data seperti inilah yang dibaca oleh Software kemudian dikoreksi jika terjadi kesalahan dengan cara membandingkan data real dengan data valid yang telah ditentukan sebelumnya. Data yang sudah valid kemudian dijadikan referensi secara terus menerus sampai dimasukkan data yang baru. Hal ini menjelaskan Autopilot sebenarnya tidak dapat bekerja sendiri mengontrol pergerakan pesawat terbang melainkan hanya mengoreksi kesalahan data yang diterimanya menjadi data koreksi yang telah di set sebelumnya oleh pilot. Jika data yang dimasukkan sebelumnya juga merupakan data yang salah maka sistem Autopilot tidak dapat mengoreksi dengan sendirinya dan akan tetap bertahan pada kondisi tersebut, oleh karena itu di dalam penerbangan sebuah pesawat terbang yang telah dilengkapi sistem Autopilot pun harus tetap disertai pilot (cockpit crew) di dalamnya guna mengantisipasi apabila terjadi kondisi-kondisi seperti itu.
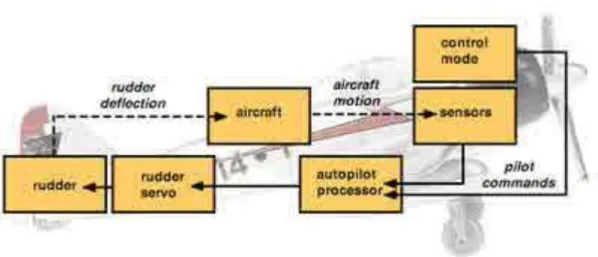
Berikut ini adalah skema dari Autopilot :
Gambar 2.2 Skema autopilot (sumber: scanner)
Autopilot juga menghitung data penerbangan secara riil dan aktual secara automatis dari data yang telah diinput sebelumnya. Dalam hal Autopilot pada pesawat UAV menggunakan berbagai macam jenis autopilot, berikut beberapa
12
jenis Autopilot beserta spesifikasinya:
Gambar 2.3 Jenis-Jenis Autopilot pada UAV. (Sumber:www.google.com keyword “ardupilot family”)
Dari sekian banyak jenis-jenis Software Autopilot Software ardupilot mega AMP 2 adalah Software yang dipilih dan cocok untuk daplikasikan pada pesawat UAV ditinjau dari keibihan yang dimilki.
2.4 Ardupilot Mega AMP 2
Ardupilot Mega atau sering disebut dengan AMP merupakan sistem Autopilot generasi ke 2 yang mana pada generasi pertama system Autopilot ini masih disebut dengan Ardupilot. Pada sejarahnya ardupilot dikelola oleh perusahan arduino namun karna spesifikasinya yang jauh berbeda dari tujuan dan spesifikasi awal pada arduino yang dikhususkan pada robotika darat sehingga ardupilot kini dikembangkan oleh Michael Oborne dengan segala ilmunya dan demi perkembangan maka ardupilot dirancang dengan open source dimana semua pengguna diperbolehkan untuk menambahkan kekurangan dari sistem dengan
syarat memenuhi segala uji coba yang menyatakan keberhasilan sistem baru tersebut. Selama 2009-2011 ardupilot telah melakukan perubahan sampai 4 kali dimana Ardupilot Mega Planner 2 merupakan ardupilot jenis terakhir yang resmi dikeluarkan oleh Michael Oborne dengan memiliki spesifikasi yang sudah dikatakan cukup lengkap untuk menjadi sistem autopilot.
Spesifikasi Ardupilot Mega Planner (AMP) 2 : Hardware
Gambar 2.4 Board AMP 2 (Sumber: www.diydrones.com)
Tabel 2.2 Spesifikasi Board AMP 2
On board Type
Processor Atmega 2560
Sensor onboard 6 axis MPU 6000 (gyro+accel),barometer Internal Memory 4MB Size 40x65x10mm Onboard seri Q4 Introduction 2011 Port onboard +
new port Platinum
Magnetometer Mini sensor
Magnetmeter 5883L
LED Mini LED board
GPS GPS MTK 3329
GPS GPS MTK 3329
14
Pada onboard hardware AMP 2 diperlukan berbagai setinggan untuk menyambungkan antara on board AMP 2 dengan computer dan pesawat uav, ada pun berbagai settingannya adalah:
1. Melakukan kalibrasi kabel jumper antara board AMP 2 dengan reciever pada pesawat UAV.
2. Menghidupkan dan memposisikan GPS dan Telemetry pada pesawat UAV. Pada saat pertama sekali dihidupkan GPS akan memakan waktu yang lama karena GPS membutuhkan loading system reading dimana pada saat pertama sekali dihidupkan akan menyala lampu GPS berwana biru, setelah selesai melakukan loading system reading maka lampu hijau akan menyala untuk menandakan bahwa GPS siap digunakan.
3. Memposisikan board AMP 2 di dalam cokpit pada pesawat.
Posisi board AMP 2 sangat berpengaruh tehadap sikap pesawat yang dibaca pada Software nantinya, sehingga posisi board AMP 2 diharuskan memiliki dudukan sendiri dengan posisi datar, lurus, dan tahan terhadap goncangan.
4. Menghubungkan hardware AMP 2 ke computer dengan menggunakan kabel USB
Tahap ini cukup memasukan connector USB ke port USB yang ada pada komputer dan board AMP 2.
Software
Gambar 2.5 Tampilan Software AMP 2 (Sumber: print screen Software AMP 2)
Spesifikasi pada Software yang sangat terlihat jelas yaitu pada tampilan Software yang lebih mudah dan menggunakan bahasa yang mudah dimengerti, dan juga pada tab help semua mengenai tab-tab yang ada pada Software dijelaskan.
AMP 2 memiliki Software pendukung yang diberi nama mission planner, mission planner ini memiliki fitur-fitur yang cukup lengkap, diantaranya flight (fitur untuk menentukan misi penerbangan pesawat terbang) dan configuration (fitur untuk menentukan parameter-parameter pesawat terbang). Berikut penjelasan masing- masing fitur tersebut :
a. Flight Data
Flight data merupakan fitur yang menampilkan data penerbangan pesawat terbang secara real time. Melalui fitur ini pilot dapat memantau data penerbangan pesawat terbang, yang berupa data ketinggian, kecepatan, koordinat, temperatur, arah terbang pesawat terbang dan lainnya. Fitur ini membantu pilot mengamati attitude pesawat terbang sehingga dapat dilakukan analisa apakah attitude pesawat terbang sudah sesuai dengan yang diinginkan atau tidak.
b. Flight Planner
Fitur flight planner memungkinkan pilot menentukan misi penerbangan pesawat terbang tanpa harus mengendalikan pesawat terbang secara langsung. Misi penerbangan berupa waypoint yang akan dilewati pesawat terbang ketika melakukan penerbangan. Dalam menentukan way point, pilot mengatur koordinat terbang pesawat terbang, yaitu letak lintang dan bujur pesawat terbang dipermukaan bumi. Hal yang perlu diperhatikan dalam menentukan waypoint ialah radius waypoint tidak boleh terlalu besar sebab semakin besar radius maka tingkat keakuratan waypoint juga semakin berkurang. Kemudian ketinggian waypoint tidak boleh terlalu besar atau terlalu kecil sebab jika terlalu tinggi pesawat terbang maka akan sulit dipantau dari darat dan jika terlalu rendah pesawat terbang maka resiko pesawat terbang bertabrakan dengan benda di darat semakin besar.
16
c. Configuration
Fitur configuration pada AMP 2 memungkinkan pilot mengatur parameter-parameter terbang pesawat terbang. Parameter yang telah diatur kemudian dimasukkan kedalam flight controller sehingga flight controller akan bekerja sesuai dengan parameter-perameter tersebut. Parameter-parameter yang diatur melalui fitur configuration pada AMP 2 adalah sebagai berikut :
1. Radio Kalibrasi
Merupakan parameter yang mengatur fungsi radio control. Pada menu ini pilot dapat mengatur kerja radio control sesuai dengan keinginan pilot.
2. Flight Mode
Merupakan parameter yang mengatur mode penerbangan pesawat terbang. Mode penerbangan yang dilakukan antara lain flight manual, Fly by wire (auto level), dan auto (way points). Mode yang digunakan merupakan optional, dapat dipilih sesuai dengan kebutuhan.
3. Battery Monitor
Merupakan parameter yang mengatur sumber tegangan pesawat terbang. Pada menu ini pilot dapat mengatur tegangan serta arus yang dikeluarkan oleh battery sesuai keinginan. Namun pengaturan keluaran tegangan serta arus biasanya otomatis dilakukan oleh flight controller sesuai dengan spesifikasi battery dan komponen seperti ESC dan motor.
4. Arduplane Level
Merupakan parameter yang mengatur tipe pesawat terbang dan posisi level. Penentuan parameter ini perlu dilakukan agar pesawat terbang dengan stabil dan sesuai dengan keinginan.
5. Arduplane PID
Merupakan parameter yang mengatur nilai PID sistem kontrol pesawat terbang pada flight mode Autopilot. PID merupakan metode kontrol otomatis yang digunakan pada sistem kontrol otomatis (autopilot) pesawat terbang. Flight Mode Autopilot yang nilai PID nya diatur melalui menu ini adalah Fly by wire, dan waypoint navigation.
6. Arduplane Configuration
Merupakan parameter yang mengatur nilai PID konfigurasi pesawat terbang. Konfigurasi pesawat terbang dalam hal ini adalah FBW pitch, FBW roll, FBW yaw, roll rate, pitch rate, yaw rate, navigation way point, throttle rate dan altitude hold.
7. Standard Parameter
Merupakan menu yang mengatur parameter standar autopilot, seperti altitude, return to land, enable compass, dan low voltages.
8. Parameter List
Merupakan menu yang menampilkan daftar dari keseluruhan parameter yang perlu diatur. Selain dari menu-menu diatas, parameter sistem kontrol Autopilot juga dapat diatur melalui menu ini.
Dari berbagai macam keungulan yang terdapat pada AMP 2 maka system Autopilot ini yang akan berkonstribusi untuk dapat memandu pesawat SUA menjalankan misi monitoring karna dapat memudahkan pilot disaat transmiter yang digunakan pilot sudah tidak terjangkau oleh receiver sehingga AMP 2 yang akan mengkuti perintah input dari pilot.
2.5 Sistem Kontrol Pada Pesawat Sky King
Pesawat terbang model yang dikendalikan dengan radio control dan ground station, komponen pokoknya terdiri dari:
a. Radio Control (transmitter dan receiver) b. Ground Station berupa laptop atau notebook c. RF Telemetry Data Set (transmitter dan receiver)
d. Brushless motor yang terpasang pada pesawat terbang model e. Propeller yang terpasang pada motor
f. Battery yang terpasang pada pesawat terbang model g. Receiver
18
i. Electronic Speed Controller (ESC)
Secara garis besar dapat diterangkan bagaimana radio control dapat bekerja mengendalikan pesawat terbang kemudian dihubungkan ke-ground station menggunakan RF Telemetry data.
Ground station akan menerima data tentang kondisi pesawat terbang yang sedang terbang kemudian digunakan untuk memantau data penerbangan. Data penerbangan kemudian dijadikan sebagai referensi untuk mengatur ulang parameter-parameter yang akan diproses oleh flight controller jika diperlukan.
Didalam flight controller terdapat sensor gyroscopic, sensor accelerometer, sensor magneto, sensor barometric dan micro controller. Data hasil dari pembacaan sensor-sensor kemudian diterjemahkan oleh mikrokontroller yang akan digunakan sebagai referensi untuk mengatur keluaran (output) ke ESC yang akan mengatur keluaran tenaga listrik untuk mengatur kecepatan putaran motor. Radio control transmitter dipegang oleh pilot yang berfungsi memancarkan gelombang radio dengan frekuensi tertentu. Gelombang radio yang dipancarkan oleh transmitter ini kemudian akan diterima oleh receiver yang terpasang dipesawat terbang kemudian diterjemahkan menjadi perintah ke-flight controller.
1. Radio control
Sistem radio control adalah penggunaan sinyal radio untuk mengontrol alat lain dari jarak jauh. Sistem radio control terdiri dari transmitter (pemancar) yang ada di ground dan receiver yang dipasang di pesawat terbang. Cara kerja transmitter adalah dengan menerjemahkan sinyal masukan dari komponen elektronik di dalamnya kemudian memancarkan gelombang radio (elektromagnetik) sebagai keluarannya dalam frekuensi tertentu. Sementara receiver menerima pancaran sinyal dari transmitter kemudian menerjemahkannya menjadi perintah.
Gambar 2.6 Transmitter 6 Channel (Sumber : www.rcgroups.com)
2. Ground station
Ground station merupakan statiun darat yang berfungsi sebagai penerima data dari pesawat terbang. Data berupa kemiringan sudut terbang, ketinggian terbang, kecepatan terbang, tekanan udara, temperatur udara dan koordinat dipermukaan bumi dipancarkan oleh transmitter yang terpasang di pesawat terbang kemudian diterima receiver yang terpasang di-ground station yang menerjemahkannya menjadi display data. Data selanjutnya dipantau melalui ground station kemudian dianalisa dan jika ditemukan kesalahan yang tidak sesuai dengan parameter-parameter yang telah ditentukan sebelumnya maka dapat langsung dilakukan koreksi (tuning). Ground station yang digunakan pada penelitian ini adalah Acer V3-471G.
3. Telemetry data set
RF Telemetry atau radio frekuensi Telemetry adalah komponen yang terdiri dari transmitter dan receiver yang berfungsi untuk komunikasi data dari flight controller ke-ground station. Proses transfer data menggunakan gelombang radio berfrekuensi tertentu. Berbeda dengan radio control, transmitter pada RF Telemetry dipasang pada flight controller pesawat terbang, sedangkan receiver
20
disambung ke-ground station. Gelombang yang dipancarkan oleh transmitter diterima oleh receiver kemudian diterjemahkan dan ditampilkan melalui ground station sehingga data penerbangan pesawat terbang dapat dipantau melalui ground station.
4. Brushless electric motor system
Brushless Motor, mengubah energi listrik menjadi energi mekanik. Memiliki stator dan rotor sebagai unit penghasil tenaganya Sehingga menjadi penggerak utama pada pesawat Sky king untuk menghasilkan thrust dengan memutar propeller.
Gambar 2.7Turnigy Motor (Sumber : www.diydrones.com)
5. Battery
Battery merupakan sumber tenaga untuk mengoperasikan komponen- komponen elektronik yang ada pada pesawat terbang yaitu receiver, motor, dan flight controller. Battery yang akan digunakan pada pesawat Sky King terdiri dari 3 cell battery 2200 mAh Li Po. Battery dapat menjadi masalah besar di dalam kelancaran aliran listrik, jika terjadi kerusakan pada battery maka semua komponen-komponen elektronik yang ada pada pesawat terbang tidak berfungsi, pesawat terbang menjadi lost control yang berakibat pesawat terbang crash
sehingga terjadi kerusakan pada pesawat terbang. Battery memiliki tenaga listrik yang akan disalurkan ke komponen-komponen pesawat terbang.
Gambar 2.8 Battery
(Sumber : www.autonomousavionics.com)
6. Receiver
Receiver, semua sistem tidak akan bekerja tanpa adanya receiver radio control. Receiver dihubungkan dan mendapat daya dari regulator sehingga receiver dapat bekerja sebagaimana mestinya. Fungsi utama receiver adalah untuk menerima perintah yang dikirimkan oleh radio transmitter untuk kemudian diolah menjadi pulsa-pulsa listrik sebagai pengatur gerakan servo dan besar kecilnya arus yang dikeluarkan oleh regulator.
Gambar 2.9 Receiver (Sumber : www.hobbyking.com)
7. Servo Motor
Servo Motor, merupakan motor penggerak dari sistem kendali yang ada pada pesawat.
22
Gambar 2.10 Servo Motor (Sumber : www.hobbypartz.com)
8. Propeller
Propeller yang umumnya digunakan pada pesawat UAV adalah tipe fixed pitch, yaitu propeller dengan hanya satu pengaturan pitch
Gambar 2.11 Propeller tipe fixed pitch (Sumber : www.okigihan.blogspot.com)
9. ESC (Electronic Speed Controller)
ESC merupakan rangkaian elektronik yang berfungsi sebagai pengatur keluaran aliran listrik. Keluaran yang dihasilkan berupa tegangan listrik dan arus listrik dalam jumlah tertentu yang dipakai untuk mengatur putaran motor sesuai kebutuhan terbang.
Gambar 2.12 Electronic Speed Control (ESC) (Sumber : www.rc-drones.com)
2.6 Global Positioning System (GPS)
Global Positioning System (GPS) merupakan sistem untuk menentukan letak dipermukaan bumi dengan metode penyelarasan (synchronization) sinyal satelit. Sistem ini menggunakan 24 satelit yang mengirimkan gelombang mikro ke bumi. Sinyal ini diterima oleh alat penerima (receiver) dipermukaan, dan digunakan untuk menentukan letak, kecepatan, arah dan waktu. Sistem ini menggunakan sejumlah satelit yang berada di orbit bumi, yang memancarkan sinyalnya ke bumi dan ditangkap oleh receiver. Ada tiga bagian penting dari sistem ini, yaitu bagian kontrol, bagian angkasa dan bagian pengguna. Berikut ini adalah penjelasan dari ketiga bagian tersebut
2.6.1 Bagian kontrol
Bagian ini berfungsi sebagai pengontrol atau pengendali satelit. Setiap satelit dapat berada sedikit diluar orbitnya, sehingga bagian ini bertugas untuk melacak orbit satelit, lokasi, ketinggian dan kecepatan. Sinyal-sinyal dari satelit diterima oleh bagian kontrol, dikoreksi dan dikembalikan ke satelit. Koreksi data lokasi yang tepat dari satelit ini disebut dengan data ephemeris, yang nantinya akan dikirimkan ke-GPS receiver di darat.
2.6.2 Bagian angkasa
Bagian ini terdiri dari kumpulan satelit yang berada di orbit bumi, sekitar 12.000 mil di atas permukaan bumi. Kumpulan satelit-satelit ini diatur sedemikian rupa sehingga receiver setiap saat dapat menerima sinyal paling sedikit dari 4 buah satelit. Sinyal satelit ini dapat melewati awan, kaca atau plastik, tetapi tidak dapat melewati benda padat seperti gedung atau gunung. Masing-masing satelit memiliki kodenya sendiri-sendiri. Nomor kode ini biasanya akan ditampilkan di alat navigasi (GPS receiver), maka kita bisa melakukan identifikasi sinyal satelit yang sedang diterima alat tersebut. Data ini berguna bagi GPS receiver untuk mengukur jarak antara receiver dengan satelit, yang akan digunakan untuk mengukur koordinat lokasi. Kekuatan sinyal satelit juga akan membantu alat dalam melakukan penghitungan. Kekuatan sinyal ini lebih dipengaruhi oleh lokasi
24
satelit, sebuah receiver akan menerima sinyal lebih kuat dari satelit yang berada tepat di atasnya dibandingkan dengan satelit yang berada jauh dari posisi receiver. Ada dua jenis gelombang yang saat ini dipakai untuk alat navigasi berbasis satelit pada umumnya, yang pertama lebih dikenal dengan sebutan L1 pada 1575.42 MHz. Sinyal L1 ini yang akan diterima oleh alat navigasi (GPS receiver). Satelit juga mengeluarkan gelombang L2 pada frekuensi 1227.6 Mhz. Gelombang L2 ini digunakan untuk kepentingan militer dan bukan untuk umum.
2.6.3 Bagian pengguna
Bagian ini terdiri dari alat navigasi yang digunakan (GPS receiver). Satelit akan memancarkan data alamat dan ephemeris yang akan diterima oleh receiver secara teratur. Data almanak berisikan perkiraan lokasi (approximate location) satelit yang dipancarkan terus menerus (continuous) oleh satelit. Data ephemeris dipancarkan oleh satelit dan valid untuk sekitar 4-6 jam. Untuk menunjukkan koordinat sebuah titik (dua dimensi), alat navigasi memerlukan paling sedikit sinyal dari 3 buah satelit. Untuk menunjukkan data ketinggian sebuah titik (tiga dimensi), diperlukan tambahan sinyal dari 1 buah satelit lagi.
Dari sinyal-sinyal yang dipancarkan oleh kumpulan satelit tersebut, GPS receiver akan melakukan perhitungan-perhitungan, dan hasil akhirnya adalah koordinat posisi alat tersebut. Makin banyak jumlah sinyal satelit yang diterima oleh receiver, akan membuat alat tersebut menghitung koordinat posisinya dengan lebih tepat. Karena alat navigasi ini bergantung penuh pada satelit, maka sinyal satelit menjadi sangat penting. Alat navigasi berbasis satelit ini tidak dapat bekerja maksimal ketika ada gangguan pada sinyal satelit. Ada banyak hal yang dapat mengurangi kekuatan sinyal satelit, antara lain :
a. Kondisi geografis, seperti yang diterangkan di atas. Selama kita masih dapat melihat langit yang cukup luas, GPS masih dapat berfungsi dengan baik.
b. Hutan, semakin lebat hutan maka semakin berkurang sinyal yang dapat diterima.
d. Kaca film mobil terutama yang mengandung metal.
e. Alat-alat elektronik yang dapat mengeluarkan gelombang elektromagnetik. f. Gedung-gedung, tidak hanya di dalam gedung, berada diantara dua buah gedung tinggi juga akan menyebabkan efek seperti berada di dalam lembah.
g. Sinyal yang memantul, seperti ketika berada diantara gedung-gedung tinggi dapat mengacaukan perhitungan alat sehingga receiver dapat menunjukkan posisi yang salah atau tidak akurat.
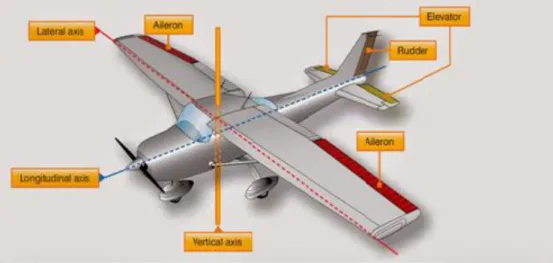
2.7 Bidang Kendali Pada Pesawat UAV
Pesawat mempunyai pergerakan pada tiga (3) sumbu putar yaitu vertical, longitudinal, dan lateral. Gerakan pesawat pada sumbu vertical disebut yaw (ke kiri atau ke kanan), pada sumbu longitudinal disebut roll (manuver ke kiri atau ke kanan), dan gerakan pada sumbu lateral disebut pitch (menanjak atau menukik). Masing-masing gerakan ini dikontrol oleh bidang kendali (control surface) dari pesawat, yaitu rudder pada saat melakukan pergerakan yaw, aileron pada saat melakukan pergerakan roll, dan elevator saat melakukan pergerakan pitch. Untuk lebih jelas dapat dilihat pada gambar 2.14
Gambar 2.13 Bidang Kendali dan Sumbu Pergerakan Pesawat UAV (Sumber : www. okigihan.blogspot.com)
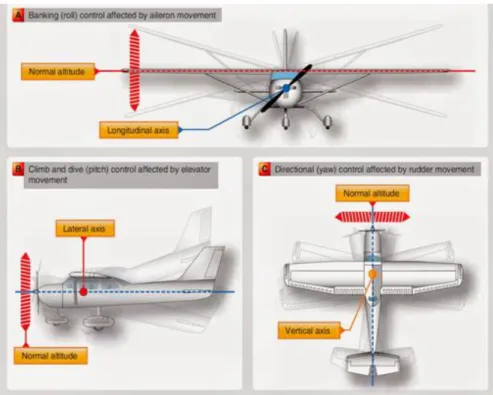
26
Gambar 2.14 Bidang Kendali Dan Sumbu Pergerakan Pesawat UAV (Sumber : www. okigihan.blogspot.com)
Pada pesawat UAV juga memiliki beberapa gaya yaitu Thrust merupakan gaya dorong yang berfungsi untuk menghasilkan gerak maju pesawat terbang. Drag adalah gaya hambat pada pesawat terbang yang dihasilkan dari bentuk pesawat terbangnya, arah drag berlawanan dengan thrust sehingga agar menghasilkan gerak maju pada pesawat terbang maka thrust harus lebih besar dari pada drag. Setelah thrust lebih besar daripada drag maka akan timbul lift yang dihasilkan oleh aliran udara yang bekerja pada wing akibat dari permukaan atas pada wing lebih panjang daripada bagian bawah, permukaan yang lebih panjang menyebabkan kecepatan udara yang mengalir lebih cepat. Dengan mengacu pada hukum Bernoulli yang menyatakan bahwa kecepatan tinggi maka tekanan rendah begitu juga sebaliknya pada aliran udara sehingga gaya angkat akan timbul dari fenomena tersebut. Arah lift berlawanan dengan arah weight.
Weight merupakan berat pesawat terbang yang berasal dari pesawat terbangnya itu sendiri. Jika lift lebih besar dari weight maka pesawat terbang akan terangkat naik.
2.8 Konfigurasi Pesawat Platform UAV Sky King
Untuk proses manufaktur atau pembuatan suatu pesawat UAV tentunya harus menentukan bentuk desainnya terlebih dahulu. Beberapa konfigurasi Pesawat Platform UAV Sky King sebagai berikut :
1. Bentuk sayap pesawat rectangular
Bentuk sayap pesawat rectangular banyak digunakan pada pesawat monitoring karena dari semua bentuk sayap pesawat yang ada, bentuk sayap inilah yang menghasilkan gerakan pesawat lebih smooth. Dengan gerakan pesawat yang lebih smooth maka hasil monitoring lebih bagus.
Gambar 2.15 Konfigurasi Sayap
(Sumber: Aerodynamics of an Unmanned Aerial Vehicle)
2. Posisi sayap pesawat
Posisi sayap diletakkan di atas fuselage. Dengan posisi sayap yang diletakkan diatas fuselage (High Wing) merupakan posisi yang memiliki karakteristik kestabilan yang baik. Sesuai dengan misi survailence yang diinginkan.
3. Konfigurasi Tail Wing
Konfigurasi ekor pesawat yang akan digunakan yaitu conventional tail karena lebih efisien dalam proses produksinya.
28
Gambar 2.16 Konfigurasi Tail
(Sumber: Aircraft Design: A Conceptual Approach by D.P Raymer)
4. Landing skid
Dengan menggunakan landing skid yang diletakkan di bawah tail arm bagian belakang akan lebih menambah safety pada pesawat bagian belakang, dan menggunakan busa hati yang ditempelkan di fuselage bagian depan bawah juga untuk menghindari kontak langsung fuselage dengan landasan. Dalam perancangan ini tidak menggunakan landing gear untuk take off dan lebih menggunakan handlaunch karena dengan handlauch pesawat bisa tetap take off ditempat yang minim landasan untuk take off menggunakan landing gear.
5. Power Plant
Konfigurasi powerplant atau tenaga penggerak pada pesawat disesuaikan dengan bentuk dan berat pesawat, begitu juga dengan jumlah mesin yang digunakan dan letak pemasangan pada pesawat. Ada pesawat yang mesinnya di bagian ekor atau tail section pesawat dan ada yang dipasangkan di bagian depan atau nose section pesawat. Variasi pemasangan dan jumlah mesin bertujuan untuk mendapatkan thrust yang lebih efektif dan efisien terhadap operasional pesawat.
Penempatan mesin sangatlah penting karena merupakan bagian yang paling berpengaruh terhadap titik berat pesawat. Tipe konfigurasi yang umumnya dipakai adalah tractor type yang dipasang di bagian depan pesawat dan pusher type yang dipasang di bagian belakang atau pada tail section.
Gambar 2.17 Konfigurasi Engine
(Sumber: Aircraft Design: A Conceptual Approach by D.P Raymer)
Untuk menarik atau mendorong pesawat, maka engine atau motor listrik pada pesawat dilengkapi dengan baling-baling (propeller). Propeller berputar mentransmisikan daya dari motor sebagai penggerak mula atau prime mover ke udara. Transmisi daya yang terjadi digunakan untuk melawan gaya tahan atau drag yang bersifat menghambat pesawat untuk terbang melaju. Bilah-bilah (blade) atau baling-baling propeller berputar sebagai sayap-sayap kecil yang bekerja seperti airfoil. Propeller yang umumnya digunakan pada pesawat UAV adalah tipe fixed pitch, yaitu propeller dengan hanya satu pengaturan pitch
Gambar 2.18 Propeller Tipe Fixed Pitch (Sumber : www.okigihan.blogspot.com)
30 BAB III
METODE PENELITIAN
3.1 Teknik Pengumpulan Data
Dalam penulisan skripsi ini menggunakan beberapa metode pengumpulan data, yaitu:
1. Observasi
Observasi merupakan sua
tu metode pengumpulan data dengan cara melihat dan mengamati kegiatan di lapangan.
2. Study Kepustakaan (Library research)
Di samping melakukan penelitian lapangan, metode lain adalah dengan mempelajari literatur-literatur yang berhubungan dengan penyusunan skripsi. Literatur-literatur yang dipakai yaitu buku, maupun melalui akses internet, sehingga dapat menunjang data dan informasi yang diperlukan dan dapat mencari informasi-informasi perkembangan terbaru yang sesuai dengan materi skripsi.
3. Wawancara
Metode ini adalah metode dengan cara bertanya kepada dosen pembimbing dan pakar-pakar yang mengetahui materi skripsi ini. Metode ini bersifat tidak terstruktur dengan cara bertanya dan bertatap muka langsung dengan instruktur di lapangan mengenai data yang dibutuhkan sesuai kebutuhan penelitian.
4. Eksperimen
Yaitu dengan cara menguji langsung proses penerbangan di lapangan. Metode ini dilakukan agar penulis dapat mengetahui langsung bagaimana proses dari awal hingga didapat hasil penerbangan yang dibutuhkan dan juga mendapatkan pengalaman terhadap penelitian skripsi ini.
3.2 Jenis data
Jenis data yang digunakan dalam penelitian ini adalah data kuantitatif (data numerik) yaitu data yang diperoleh dalam bentuk angka yang dapat dianalisa secara statistik matematik maupun numerik data ini telah diperoleh pada analisis prestasi terbang sehingga pada analisis ini lebih kepada data riil yang terjadi pada pesawat tebang yang nantinya akan dibandingkan dengan data kuantitatif prestasi terbang. Dan ada juga data pengambilan hasil monitoring (misi) berupa foto dan video dan juga data kualitatif (data kategori) yaitu data yang diperoleh selain angka, melainkan disuguhkan dalam bentuk parameter, misalnya konsep atau dimensi pesawat Sky King, tinggi-rendah pesawat, dll.
3.3 Sumber Data
a. Data Primer : data yang diperoleh langsung oleh penyusun skripsi Sky King(Perancangan dan prestasi terbang, dan proses produksi) dengan cara interview (wawancara) langsung dan melakukan kunjungan pustaka, disertai pengamatan dilapangan.
b. Data Sekunder : data yang diperoleh dari berbagai buku maupun hasil searching dari internet yang di publish oleh pengguna ardupilot lainnya.
32
Tidak
Ya 3.4 Block Diagram
Dalam pengaplikasian ardupilot pada pesawat UAV maka dibuatlah diagram alur analisis sebagai berikut:
Gambar 3.1 Blok Diagram Penelitian Sumber: Pengolahan Data Penulis Mulai
Perancangan Ardupilot
Selesai
Pengaplikasian Ardupilot
Kesimpulan Perbandingan data Prestasi
terbang dengan riil Pengumpulan Data
Berhasil Mengaplikasikan
3.5 Perencanaan Penelitian Pesawat UAV Sky King
Pesawat Sky King adalah jenis pesawat fixed wing berbahan dasar komposit dan kayu balsa. Diproyeksikan sebagai pesawat yang dapat digunakan untuk terbang surveilance yang secara khusus untuk dipergunakan masyarakat sipil. Sehingga untuk menghasilkan sebuah pesawat yang handal, perlu diperhatian tahapan-tahapan dalam proses perencanaan pembuatan seperti berikut:
1. Merencanakan misi penerbangan
2. Memilih jenis pesawat yang akan dipasang software ardupilot, sampai mengetahui dimensi pesawat.
3. Proses penelitian sesuai dengan urutan yang telah dibuat ( penyesuaian data dengan skripsi perancangan,prestasi terbang, dan pembuatan pesawat, pengaplikasian ardupilot).
4. Pemasangan Hardware ardupilot 5. Kalibrasi
6. Pembahasan dan hasil prestasi terbang pesawat UAV Sky King secara aktual.
7. Kesimpulan dan daftar pustaka.
Semua prsoses ini dilakukan agar proses pengerjaan menjadi terstruktur dan sistematis
.
3.6 Misi Penerbangan Sky King
Sky King diproyeksikan sebagai pesawat yang bisa digunakan oleh masyarakat sipil untuk keperluan foto udara, pemantauan kepadatan lalu lintas (surveillance) atau misi-misi penerbangan pesawat tanpa awak pada umumnya, selain pesawat Sky King diproyeksikan untuk semua itu, adapun misi utama pesawat Sky King untuk mengikuti Kompetisi Robot Terbang Indonesia sehingga pesawat dibuat untuk dapat menyesuaikan kategori misi monitoring yang ditentukan dari kompetisi nantinya.
34
3.7 Memilih Jenis dan Dimensi Pesawat Sky King
Setelah karakteristik misi penerbangan diketahui, berikutnya adalah menentukan jenis pesawat yang sesuai untuk melaksanakan misi tersebut. Sky King merupakan gabungan karakter antara tipe pesawat sport, trainer, dan pesawat trainer glider, yaitu berkecepatan rendah, stabil, dan mudah dikendalikan. Dari karakter tersebut akan diketahui bentuk dan konfigurasi sayap pesawat yang akan diaplikasikan pada Sky King. Untuk karakteristik terbang kombinasi sport, trainer, dan trainer glider yang dikategorikan sebagai slow flyer , biasanya menggunakan sayap dengan konfigurasi high-wing, Aspect Ratio (AR) antara 7 sampai 9 dan menggunakan airfoil NACA 2411 (Reff : “Aircraft Design (1)” by Daniel P.Raymer).
Gambar 3.2 Dimensi Pesawat Sky King
(sumber: skripsi perancangan Sky King“Surya Adhi Kusuma”)
Tabel.3.1 Konfigurasi Pesawat Sky King
Sumber: Pengolahan Data Penulis Komponen Simbol Nilai Berat total WTo 2,0 kg Berat kosong We 0,932 kg Panjang fuselage L 124,88 cm
Pada Spesifikasi yang didapatkan di saat melakukan metode penelitian untuk pesawat Sky Kingadalah sebagai berikut:
Tabel 3.2 Spesifikasi Pesawat Sky King
No Informasi Input Satuan
1 Airframe
1.1 Panjang 115 mm
1.2 Bentang Sayap 160 mm
1.3 Material Fuselage Komposit
1.4 Material tail Carbon
1.5 Material wing Komposit
1.6 Jenis Sambungan fuselage-wing Tali
pengikat 1.7 Jenis Sambungan Fuselage-tail Araldite
1.8 Jumlah sayap 1 buah
1.9 Berat total 2000 gram
1.10 Sifat Airframe Kuat,ringan
1.11 Jumlah Servo 4 buah
2 Sistem Propulsi
2.1 Jumlah Motor 1 buah
2.2 Daya Motor 1000 KV
2.3 Jenis motor Turnigy
2.4 jumlah bilah tiap propeller 2 buah
3 Sistem Elektronis
3.1 Jumlah Baterai 1 buah
3.2 Jenis Baterai lytium
polimer
3.3 jumlah sel baterai 3 sel
3.4 jenis flight control board AMP 2
3.5 jenis telemetri RC Timer
433 MHz
3.6 frekuensi telemetri 433 MHZ
3.7 frekuensi transmitter-receiver 2,4 MHZ 3.8 menggunakan penguat daya pancar - 3.9 besar daya penguat daya pancar -
36
No Informasi Input Satuan
4 GUI
4.1 Memiliki GUI mission
planner 4.2 Mampu mengubah input koordinat Ya 4.3 mengetahui attitude dan altitude
pesawat Ya
4.4 mampu engage dan disengage
sistem autonomous Ya
4.5 sifat GUI open source
4.6 metode landing Landing skid
4.7 metode failsafe Ya
5 Kamera
5.1 Kamera Ya
5.2 Merk kamera Mini
DV/camera
5.3 Resolusi kamera 7 MP
5.4 Menggunakan steady kamera -
Sumber: Pengolahan Data Penulis
3.8 Data Prestasi Terbang
Uji terbang merupakan suatu kegiatan yang wajib dalam pembuatan pesawat UAV, pada uji terbang yang dimaksudkan adalah hasil dari tujuan, proses manufaktur pesawat, dan perhitungan prestasi terbang sesuai dengan data riil pada pengaplikasian ardupilot, sehingga semua akan sesuai dengan yang telah direncakan. Setelah dilakukanya perhitungang prestasi terbang pada skripsi Surya Adhy Kusuma maka kemudian akan di bandingkan data prestasi terbang tematik dan pada ardupilot sehingga pesawat dikatakan mampu terbang dengan menggunakan ardupilot, dengan alasan data tematik perhitungan prestasi terbang tidak jauh berbeda dengan data pada riil (ardupilot) nya.
Perhitungan analitik untuk prestasi terbang pesawat Sky King didapatkan dari perhitungan yang telah dikerjakan pada skripsi Surya Adhy Kusuma, sehingga data tersebut diambil untuk keperluan perbandingan dengan prestasi
terbang secara aktual yang akan dipantau dari software ardupilot AMP2, ada pun data prestasi terbangnya ialah sebagai berikut:
Untuk melakukan analisis perhitungan dari jarak jelajah (range) dan lama waktu terbang (endurance) diperlukan data berupa harga pasti pada kondisi terbang jelajah dan steady state level Flight. Berikut adalah hasil perhitungan analitik Surya Adhy Kusuma
1. V = 30 km/jam = 8,333 m/s 2. Sw = 0,2989 m2
3. ρ pada ketinggian 200 meter = 1,20165 kg/m³ 4. Qₒ = 2200 mAh 5. Qı = 20 % dari Qₒ = 440 mAh 6. = 80 % 7. WTo = 19,6 N 8. CL = 9. 10. CD = 0,0432 11. 12. 13. ρ∞ = 74,161
14. E (Beda Potensial) = 11,4 Watt
3.8.1 Jarak Jelajah (Range) dan Lama Waktu Terbang (Endurance)
Penelitian ini dalam prestasi terbang akan menghitung performa dari pesawat yang sudah dirancang. Performa tersebut meliputi menghitung jarak jelajah (Range) dan Lama waktu terbang (Endurance). Penghitungan ini dirasa sangat penting karena sebelum pesawat diuji terbang harus terlebih dahulu mengetahui performa pesawat sehinga saat uji terbang penliti mengetahui batas maximum performa pesawat sehinga peneliti lebih berhati-hati agar tidak melebihi batas maximum performa pesawat tersebut. Dari definisinya jarak jelajah (range) adalah total jarak (dihitung dari ground) yang dilalui oleh sebuah pesawat