MAKSIMAL
SKRIPSI
Disusun oleh :
Devin Arie Wijayanto
NPM. 0634015087
PROGRAM STUDI TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
MAKSIMAL
SKRIPSI
Diajukan Untuk Memenuhi Sebagai Persyaratan
Dalam Memperoleh Gelar Sarjana Komputer
Program Studi Teknik Informatika
Disusun oleh :
Devin Arie Wijayanto
NPM. 0634015087
PROGRAM STUDI TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN” JAWA TIMUR
SURABAYA
MENDAPATKAN ENERGI MAKSIMAL Nama Mahasiswa : DEVIN ARIE WIJAYANTO
NPM : 0634015087
Program Studi : TEKNIK INFORMATIKA Jurusan : TEKNIK INFORMATIKA
Menyetujui,
PEMBIMBING UTAMA PEMBIMBING PENDAMPING
Basuki Rachmat, S.si, MT
Ir Kartini, MT
NPT. 36907 060 209
NIP. 030 212 016
KETUA PROGDI DEKAN
TEKNIK INFORMATIKA FAKULTAS TEKNOLOGI INDUSTRI
PEMANFAATAN MIKROKONTROLER SEBAGAI PENGENDALI
SOLAR TRACKER UNTUK MENDAPATKAN ENERGI
MAKSIMAL
Disusun Oleh :
Devin Arie Wijayanto
0634015087
Telah disetujui untuk mengikuti Ujian Negara Lisan Gelombang V Tahun Akademik 2010/2011
Pembimbing Utama Pembimbing Pendamping
Basuki Rachmat, S.si, MT Ir Kartini, MT NPT. 36907 060 209 NIP. 030 212 016
Mengetahui,
Ketua Program Studi Teknik Informatika Fakultas Teknologi Industri
UPN ”Veteran” Jawa Timur
SOLAR TRACKER UNTUK MENDAPATKAN ENERGI
MAKSIMAL
Disusun Oleh :
Devin Arie Wijayanto
NPM. 0634015087
Telah dipertahankan di hadapan dan diterima oleh Tim Penguji Skripsi Program Studi Teknik Informatika Fakultas Teknologi Industri
Universitas Pembangunan Nasional ”Veteran” Jawa Timur Pada Tanggal 10 Juni 2011
Pembimbing : Tim Penguji :
1. 1.
Basuki Rachmat, S.si, MT Ir Kartini, MT NPT. 36907 060 209 NIP. 030 212 016
2. 2.
Ir Kartini, MT Rinci Kembang Hapsari, S.Si NIP. 030 212 016 NIDN. 0712 127 701
3.
Abdullah Fadil, S.Kom NPT. 386 081 002 951 Mengetahui,
Dekan Fakultas Teknologi Industri
Universitas Pembangunan Nasional ”Veteran” Jawa Timur
FAKULTAS TEKNOLOGI INDUSTRI
KETERANGAN REVISI
Kami yang bertanda tangan di bawah ini menyatakan bahwa mahasiswa berikut:
Nama : Devin Arie Wijayanto NPM : 0634015087
Jurusan : Teknik Informatika
Telah mengerjakan revisi/ tidak ada revisi*) pra rencana (design)/ skripsi ujian lisan gelombang I, TA 2009/2010 dengan judul:
“ PEMANFAATAN MIKROKONTROLER SEBAGAI PENGENDALI SOLAR TRACKER UNTUK MENDAPATKAN ENERGI MAKSIMAL”
Surabaya, Juni 2011 Dosen Penguji yang memerintahkan revisi:
1) Ir Kartini, MT NIP. 030 212 016
2) Rinci Kembang Hapsari, S.Si NIDN. 0712 127 701
3) Abdullah Fadil, S.Kom NPT. 386 081 002 951
Mengetahui,
Pembimbing Utama Pembimbing Pendamping
Basuki Rachmat, S.si, MT Ir Kartini, MT
{
}
{
}
PENGENDALI SOLAR TRACKER UNTUK
MENDAPATKAN ENERGI MAKSIMAL
Disusun Oleh :
Devin Arie Wijayanto
NPM. 0634015087
Telah dipertahankan di hadapan dan diterima oleh Tim Penguji Skripsi Program Studi Teknik Informatika Fakultas Teknologi Industri
Universitas Pembangunan Nasional ”Veteran” Jawa Timur Pada Tanggal 10 Juni 2011
Pembimbing : Tim Penguji :
1. 1.
Basuki Rachmat, S.si, MT Ir Kartini, MT NPT. 36907 060 209 NIP. 030 212 016
2. 2.
Ir Kartini, MT Rinci Kembang Hapsari, S.Si NIP. 030 212 016 NIDN. 0712 127 701
3.
DAFTAR ISI
ABSTRAK ………... i
KATA PENGANTAR ... ii
UCAPAN TERIMA KASIH ……….. iii
DAFTAR ISI ……… v
DAFTAR GAMBAR ... ix
DAFTAR TABEL ... xi
BAB I PENDAHULUAN ………... 1
1.1 Latar Belakang ... 1
1.2 Perumusan Masalah ... 2
1.3 Tujuan Penelitian ... 2
1.4 Manfaat Penelitian ... 3
1.5 Batasan Masalah ... 3
1.6 Metode Penelitian ... 4
1.7 Sistematika Penulisan ………... 6
BAB II DASAR TEORI ………. 8
2.1 Gambaran Umun Mikrokontroller ... 8
2.2 Mikrokontroler AT89S51………. 10
2.2.1 Arsitektur Mikrokontroler AT89S51 ... 11
2.2.2 Memori Internal AT89S52………... 17
2.2.4 Bahasa Assembly Mikrokontroler AT89S52……… 20
2.2.5 Instruksi Mikrokontroler AT89S52………. 20
2.3 Sel Surya (Solar Cell)……… 25
2.4 Penggerak Solar Cell (Solar Tracker)………..…. 26
2.5 Liquid Crystal Display (LCD)………... 27
2.6 Resistor peka Cahaya / light-dependent resistor (LDR) ……… 30
2.7 Transistor ……… 31
2.8 Relay ……… 31
2.9 Kapasitor (Kondensator) ……….... 32
2.10 IC Regurator 7805 ………. . 35
2.11 Dioda ………. . 36
2.12 Resistor ……… 36
BAB III PERANCANGAN SISTEM ………. 38
3.1 Perancangan Alat ……… 38
3.2 Blok Diagram ………. 39
3.3 Spesifikasi Hardware Dan Software ………. 40
3.3.1 Spesifikasi Hardware ……… 40
3.3.2 Spesifikasi Software ………. 41
3.4 Cara Perancangan Alat ……….. 42
3.5 Perancangan Alat ……….. 43
3.5.1 Sistem Rangkaian Sensor Peka Cahaya ……… 43
3.5.2 Sistem Minimum Mikrokontroler AT89S52 ………. 45
3.5.4 Pengukur Daya Solar Cell ……… 51
3.5.5 Penggerak Solar Tracker ……….. 52
BAB IV IMPLEMENTASI
………...
………. 544.1 Kebutuhan Sistem ……… 54
4.1.1 Perancangan Sistem ……… 54
4.2 Implementasi Alat ……… 55
4.2.1 Sistem Rangkaian Sensor Peka Cahaya ……….. 55
4.2.2 Rangkaian Minimum Mikrokontroller AT89S52 ………… 57
4.2.3 Rangkaian Penggerak Solar Tracker ……… 58
4.3 Implementasi Coding ……… 59
4.4 Prosedur Pemasangan Program Pada Mikrokontroller AT89S52.. 67
4.4.1 Download Program Ke dalam Mikrokontroler ………. 67
BAB V UJI COBA DAN EVALUASI……… 74
5.1 Pengujian Alat ………. 74
5.1.1 Pengujian Catu Daya ……….. 74
5.1.2 Pengujian Sistem Penggerak Solar Tracker ……….. 75
5.1.3 Pengujian Rangkaian Solar Cell ……… 77
5.1.4 Pengujian Display Daya ………. 78
BAB VI PENUTUP ……….………. 79
6.1 Kesimpulan ……….. 79
PEMANFAATAN MIKROKONTROLER SEBAGAI PENGENDALI SOLAR TRACKER UNTUK MENDAPATKAN ENERGI MAKSIMAL
Penyusun : Devin Arie Wijayanto Pembimbing I : Basuki Rahmat,S.Si , MT Pembimbing II : Ir.Kartini ,MT
ABSTRAK
Pada saat ini kebutuhan energi sangat meningkat. Diantaranya adalah kebutuhan energi listrik yang semakin bertambah besar. Oleh karena itu dibutuhkan terobosan baru sebagai pembaruan energi listrik. Berbagai macam cara digunakan untuk menambah pasokan energi listrik dunia, salah satunya dengan menggunakan sel solar, namun sel solar yang biasa digunakan masih dengan cara manual, yaitu dengan cara menghadapkan sel solar pada lintasan yang sering dilalui oleh matahari 9menghadap pada satu arah mata angin). Sehingga dalam proyek akhir ini mencoba untuk membuat sebuah solar tracker dengan menggunakan sensor LDR (Light Dependent Resistor), dan dengan sistem kontrol yang menggunakan mikrokontroler AT89S52.
Cara kerja alai ini adalah pada saat power supply dinyalakan mikrokontroler AT89S52 menyala dan memberi pulsa ke sensor LDR (Light DEpendent Resistor) dan sensor LDR mulai mencari datangnya cahaya yang terkuat. Kemudian bila sensor LDR telah menemukan titik koordinat dari suatu sumber cahaya yang terkuat maka sensor memberikan informasi kepada mikrokontroler AT89S52 untuk menyalakan motor agar menggerakkan tiang penyangga untuk sel solar pada titik koordinat yang telah diinformasikan sensor LDR pada mikrokontroler AT89S52. Dengan demikian cahaya yang diterima sel solar dapat lebih optimal dibandingkan jika solar tracker yang hanya menghadap pada satu titik koordinat.
Kata kunci : Mikrokontroler AT89S52, solar tracker, LDR (Light Dependent Resistor)
KATA PENGANTAR
Dengan memanjatkan puji dan syukur kehadirat Allah SWT, atas berkat dan rahmat-Nya yang telah dilimpahkan kepada penyusun sehingga terbentuklah suatu Tugas Akhir yang berjudul “Pemanfaatan Mikrokontroler Sebagai Pengendali
Solar Tracker Untuk Mendapatkan Energi Maksimal”, untuk memenuhi salah satu
syarat Ujian Akhir Sarjana di Fakultas Teknologi Industri Jurusan Teknik Informatika Universitas Pembangunan Nasional “Veteran” Jatim.
Penulis menyadari bahwasanya dalam penyusunan Tugas Akhir ini masih memiliki banyak kekurangan baik dari segi materi maupun dari segi penyusunannya mengingat terbatasnya pengetahuan dan kemampuan penulis. Untuk itu, dengan kerendahan hati penyusun mohon maaf dan penyusun sangat mengharapkan segala saran dan kritikan yang sekiranya dapat membantu penyusun agar dalam penyusunan selanjutnya bisa lebih baik lagi.
Surabaya, 10 Juni 2011
UCAPAN TERIMA KASIH
Tugas Akhir ini dapat penulis selesaikan berkat kerja sama dari berbagai pihak, baik moril maupun materil. Oleh karena itu, penulis ingin menyampaikan rasa hormat dan terima kasih yang sebesar–besarnya kepada :
1. Alloh SWT, atas semua anugrah dan pertolongan yang tak terkira dalam hidupku, All the things I do is always for Alloh SWT. Serta tidak terlupakan iringan salam dan sholawat bagi junjungan kami Nabi besar Muhamad SAW.
2. Almarhum Abah tercinta (H.M.Erfan), My Mom (Hj.Sri Utaminingsih), Ibuku tersayang (Sri Mulyani) , My Little Angel (Marwah Salsabillah Rahmawati) , My
Sweet heart (Ika Kusumanigayu) dan semua keluarga ku (Mas Budi,Mas Tatang)
yang telah memberikan semua bantuan, dukungan, financial support, semangat, cinta-kasih serta dukungan moril maupun materil selama ini. “Akhirnya
Kurasakan Rasa Sayangmu Kepadaku telah menyatu dalam tiap langkahku”
“Semua sumbangsihmu kan ku kenang selalu sampai akhir hidupku”
3. Ir. Sutiyono, MT. selaku dekan Fakultas Teknologi Indutri Universitas Pembangunan Nasional “Veteran” Jatim.
5. Ir.Kartini, MT selaku pembimbing 2, atas bimbingannya selama penyusunan Tugas Akhir ini.
6. Dosen – dosen Teknik Informatika UPN “Veteran” Jatim atas bimbingan dan ilmunya.
7. Arek-arek kontrak’an kuabeh (Sinjol, Sinyo, Loreng, Mumun, Jemblunk, Frista), serta teman-teman penulis yang tidak mungkin penulis sebutkan namanya satu per satu terima kasih telah membantu dan memberikan do’anya kepada penulis untuk menyelesaikan skripsi ini.
8. Rekan-rekan di Teknik Informatika UPN “Veteran” Jatim angkatan 2006 terutama kelas sore (Agus, Alif, Andy, Hendra, Rico, Ali, etc), juga teman- teman penyusun dari semua angkatan yang secara tidak langsung telah membantu selama penyusunan tugas akhir ini.
9. Dan semua pihak yang telah banyak membantu yang tidak bisa disebutkan satu-persatu.
D edicated to :
T hanks to L illahi R obbi, Gusti A lloh
M y Beloved F ather, M other, M om and Dad, who always encourage
and give a” freedom of thinking” , deep understanding, silent
pray, endless love, effort, material support, and guidance in my life,
for their sacrifice, nothing is enough.
M y darest brother, I appreciate your cares and disturbances
M y S weatheart, that give me a spirit for my life with your love,
pure care, lovely for support me in every day, I appreciate your love.
M y headmaster A ll my teacher, tutor, and all stack holder in
UP N “ Veteran” JA T I M
A ll my Best F riend, thanks for your challenger, handshaking, your
kidding, and everythink support
Because, without them I can’ t be the best
1.1 Latar Belakang
Perkembangan teknologi dewasa ini sangatlah pesat, terlebih lagi ketika ditemukannya teknologi mikrokontroler. Seiring dengan perkembangannya, banyak dibangun perangkat lunak maupun perangkat keras dengan memanfaatkan teknologi tersebut. Dalam penelitian ini, penulis mencoba memanfaatkan teknologi mikrokontroler tersebut sebagai pengendali Solar Tracker Untuk Mendapatkan Energi Maksimal.
Perancangan ini bertujuan untuk membuat suatu alat penyimpan energi listrik melalui solar cell yang dapat seoptimal mungkin mendapatkan panas dari sinar matahari (intensitas cahaya tertinggi). Kondisi ini dapat dilakukan jika solar cell tersebut selalu tegak lurus terhadap arah fokus datangnya sinar matahari, dengan demikian solar cell harus selalu mengikuti arah pergerakan matahari.
Sudut yang paling kuat dari sensor peka cahaya tersebut diasumsikan sebagai sudut fokus arah datangnya sinar matahari, sehingga sudut dengan fokus terkuat tersebutlah yang akan diikuti oleh pergerakan solar tracker ini.
Kepekaan paling kuat tersebut diatas, dengan memanfaatkan teknologi mikrokontroler diharapkan akan mampu diikuti oleh pergerakan solar cell. Dengan kondisi ini maka solar cell akan selalu mendapatkan sinar matahari secara optimal disepanjang hari. Sehingga, dengan semakin besar energi panas yang didapatkan solar cell nya, maka semakin maksimal pula energi listrik yang dihasilkan
1.2 Perumusan Masalah
Dengan adanya latar belakang di atas, maka didapatkan beberapa rumusan masalah sebagai berikut:
a) Bagaimana proses untuk membangun sebuah alat pengendali Solar
Tracker dengan memanfaatkan teknologi mikrokontroller?.
b) Bagaimana nantinya solar cell tersebut dapat digerakkan dengan solar
trackernya, sehingga dapat seoptimal mungkin mendapatkan panas dari sinar
matahari?.
c) Bagaimana merangkai solar cell, sehingga nantinya dapat diukur pula
berapa energi yang didapatkan dalam bentuk display daya?.
1.3 Tujuan Penelitian
dari sinar matahari. Kondisi ini dapat dilakukan jika solar cell tersebut selalu tegak lurus terhadap arah fokus datangnya sinar matahari (intensitas cahaya tertinggi), dengan demikian solar cell harus selalu mengikuti arah pergerakan matahari.
1.4 Manfaat Penelitian
Dengan merencanakan dan mengimplementasikan sebuah alat pengendali
solar tracker tersebut diatas, nantinya diharapkan dapat mempunyai manfaat
sebagai berikut:
a) Mampu penyimpan energi listrik melalui solar cell yang dapat seoptimal
mungkin mendapatkan panas dari sinar matahari.
b) Jika solar cell mampu mendapatkan panas dari sinar matahari secara optimal, secara otomatis energi listrik yang dihasilkanpun semakin besar.
1.5 Batasan Masalah
Dalam rumusan masalah yang dihadapai, diperlukan suatu ruang lingkup permasalahan terhadap sistem yang akan dibangun. Hal ini bertujuan agar pembahasan masalah tidak terlalu meluas. Maka ruang lingkup yang akan dibahas adalah sebagai berikut :
a) Mikrokontroler yang digunakan adalah AT89S52.
b) Menggunakan bahasa pemrograman ASM (assembler).
d) Sedangkan pencuplikan tegangan yang dihasilkan oleh solar cellnya, dilakukan dengan teknologi IC Modular pembaca tegangan memanfaatkan modul Avometer digital. Sehingga pada sisi keluaran solar cell didapatkan sebuah nilai tegangan yang pasti dan konstan.
1.6 Metode penelitian
Metode yang dilaksanakan dalam penelitian ini adalah :
1. Study Literatur
Pada tahap ini dilakukan penelusuran terhadap berbagai macam literatur seperti buku, referensi – referensi baik melalui perpustakaan maupun internet dan lain sebagainya yang terkait dengan judul penelitian ini dan berguna untuk pembelajaran bagi penulis.
2. Analisa Aplikasi
3. Rancang – Bangun Aplikasi
Pada tahap ini merupakan tahap yang paling banyak memerlukan waktu karena model dan rancangan aplikasi yang telah dibuat diimplementasikan dengan menggunakan ASSEMBLY ASM 51.
4. Uji Coba dan Evaluasi Aplikasi
Pada tahap ini aplikasi yang telah dibuat ini akan dilakukan beberapa skenario uji coba dan dievaluasi untuk kelayakan pemakaian alat.
5. Dokumentasi
Pada tahap ini dilakukan pembuatan rincian laporan terstruktur mulai dari
study literatur sampai dengan implementasi dari ”Pemanfaatan
1.7 Sistematika Penulisan
Sistematika pembahasan Tugas akhir yang disusun ini akan dibahas pada bab-bab yang akan diuraikan di bawah ini :
BAB I : PENDAHULUAN
Menguraikan tentang latar belakang permasalahan dengan mencoba merumuskan inti permasalahan, menentukan tujuan serta manfaat dari penelitian dibuat yang kemudian diikuti dengan pembatasan masalah, metodelogi penelitian serta sistematikan penulisan.
BAB II : TINJAUAN PUSTAKA
Pada bab kedua berisi teori penunjang yang menguraikan tentang teori–teori yang mendukung dari bagian-bagian perangkat atau alat yang dibuat.
BAB III : PERANCANGAN SISTEM
Pada bab ketiga diuraikan mengenai perancangan sistem yang terdiri atas penjelasan dari analisa permasalahan, perancangan aplikasi, prosedur proses aplikasi, sampai dengan rancangan antarmuka aplikasi.
BAB IV : IMPLEMENTASI
BAB V : UJI COBA DAN EVALUASI
Membahas tentang pengujian dan hasil dari perancangan system.
BAB VI : PENUTUP
Pada bab keenam berisi kesimpulan dan saran untuk pengembangan aplikasi lebih lanjut dalam upaya memperbaiki kelemahan pada aplikasi guna untuk mendapatkan hasil kinerja aplikasi yang lebih baik.
DAFTAR PUSTAKA
BAB II
DASAR TEORI
2.1 Gambaran Umum Mikrokontroler
Mikrokontroler merupakan suatu IC yang di dalamnya berisi CPU, ROM,
RAM, dan I/O. Dengan adanya CPU tersebut maka mikrokontroler dapat
melakukan proses berfikir berdasarkan program yang telah diberikan kepadanya. Mikrokontroler banyak terdapat pada peralatan elektronik yang serba otomatis, mesin fax, dan peralatan elektronik lainnya. Mikrokontroler dapat disebut pula sebagai komputer yang berukuran kecil yang berdaya rendah sehingga sebuah baterai dapat memberikan daya. Mikrokontroler terdiri dari beberapa bagian seperti yang terlihat pada gambar di bawah ini :
Pada gambar tersebut tampak suatu mikrokontroler standart yang tersusun atas komponen-komponen sebagai berikut :
A. Central Processing Unit (CPU)
CPU merupakan bagian utama dalam suatu mikrokontroler. CPU pada
mikrokontroler ada yang berukuran 8 bit ada pula yang berukuran 16 bit. CPU ini akan membaca program yang tersimpan di dalam ROM dan melaksanakannya.
B. Read Only Memory (ROM)
ROM merupakan suatu memori (alat untuk mengingat) yang sifatnya
hanya dibaca saja. Dengan demikian ROM tidak dapat ditulisi. Dalam dunia mikrokontroler ROM digunakan untuk menyimpan program bagi mikrokontroler tersebut. Program tersimpan dalm format biner (‘0’ atau ‘1’). Susunan bilangan biner tersebut bila telah terbaca oleh mikrokontroler akan memiliki arti tersendiri.
C. Random Acces Memory (RAM)
Berbeda dengan ROM, RAM adalah jenis memori selain dapat dibaca juga dapat ditulis berulang kali. Tentunya dalam pemakaian mikrokontroler ada semacam data yang bisa berubah pada saat mikrokontroler tersebut bekerja. Perubahan data tersebut tentunya juga akan tersimpan ke dalam memori. Isi pada
D. Input / Output (I/O)
Untuk berkomunikasi dengan dunia luar, maka mikrokontroler menggunakan terminal I/O (port I/O), yang digunakan untuk masukan atau keluaran.
E. Komponen lainnya
Beberapa mikrokontroler memiliki timer/counter, ADC (Analog to Digital
Converter), dan komponen lainnya. Pemilihan komponen tambahan yang
sesuai dengan tugas mikrokontr oler akan sangat membantu perancangan sehingga dapat mempertahankan ukuran yang kecil. Apabila komponen-komponen tersebut belum ada pada suatu mikrokontroler, umumnya komponen tersebut masih dapat ditambahkan pada sistem mikrokontroler melalui port-portnya.
2.2 Mikrokontroler AT89S52
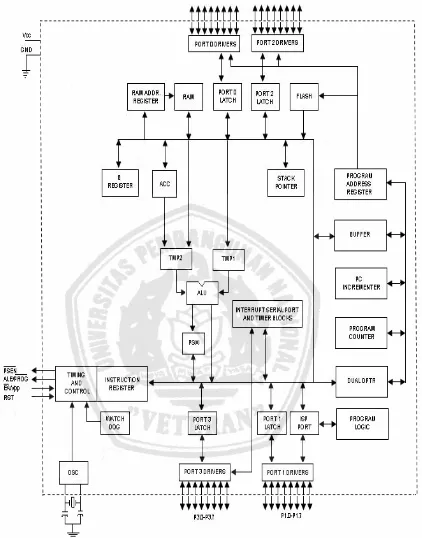
2.2.1 Arsitektur Mikrokontroler AT89S52
Mikrokontroler ini mempunyai empat port I/O, akumulator, register, RAM
internal, stack pointer, Arithmetic Logic Unit (ALU), pengunci, dan rangkaian
osilasi yang membuat mikrokontroler ini dapat beroperasi hanya dengan sekeping IC. Secara fisik, mikrokontroler AT89S52 mempunyai 40 pin, 32 pin diantaranya adalah pin untuk keperluan port masukan atau keluaran. Satu port paralel terdiri dari 8 pin, dengan demikian 32 pin tersebut membentuk 4 buah port paralel, yang masing-masing dikenal dengan Port 0, Port 1, Port 2 dan Port 3.
Di bawah ini merupakan susunan pin AT89S52 :
Berikut penjelasan dari masing-masing pin dan port :
1. Port 0
Port 0 merupakan port I/O 8 bit open drain dua arah. Sebagai sebuah port, setiap pin dapat mengendalikan 8 input TTL. Ketika logika “1” dituliskan ke port 0, maka port dapat digunakan sebagai input dengan high impedansi. Port 0 dapat juga dikonfigurasikan untuk multipleksing dengan address/data bus selama mengakses memori program atau data eksternal.
2. Port 1
Port 1 merupakan port I/0 8 bit dua arah dengan internal pull up. Buffer
output port 1 dapat mengendalikan empat TTL input. Ketika logika “1”
dituliskan ke port 1, maka port ini akan mendapatkan internal pull up dan dapat digunakan sebagai input. Port 1 juga menerima alamat byte rendah selama pemrograman dan verifikasi Flash.
Port Pin Fungsi Alternatif :
P1.5 MOSI ( digunakan untuk In System Programming )
P1.6 MISO ( digunakan untuk In System Programming )
P1.7 SCK ( digunakan untuk In System Programming )
3. Port 2
Port 2 merupakan port I/O 8 bit dua arah dengan internal pull up. Buffer
ke port 2, maka port ini akan mendapatkan internal pull up dan dapat digunakan sebagai input.
4. Port 3
Port 3 merupakan port I/O 8 bit dua arah dengan internal pull up. Buffer output port 3 dapat mengendalikan empat TTL input. Ketika logika “1” dituliskan ke port 3, maka port ini akan mendapatkan internal pull up dan dapat digunakan sebagai input.
5. Pin 1 sampai 8
Berfungsi sebagai: P1.0_ P1.7. Pin 1 sampai 8 merupakan saluran I/O 8 bit yang bersifat dua arah, dengan internal pull-up yang dapat digunakan untuk berbagai keperluan seperti mengendalikan 4 input TTL. Port ini juga digunakan sebagai saluran alamat saat pemrograman dan verifikasi. Pada pin 6,7,8 terdapat port pin yang digunakan pada saat download program.
6. Pin 9
Berfungsi sebagai : RST. Pin 9 Merupakan masukan reset bagi mikrokontroler. Reset akan aktif dengan memberikan input high selama 2 cycle.
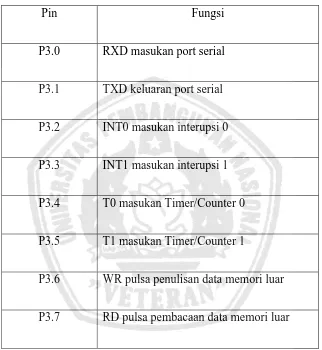
7. Pin 10 sampai 17
ini memiliki fungsi pengganti. Bila fungsi pengganti tidak dipakai maka dapat digunakan sebagai port paralel 8 bit serbaguna. Selain itu, sebagian Port 3 dapat berfungsi sebagai sinyal kontrol saat proses pemrograman dan verifikasi.
Tabel. 2.1 Fungsi Khusus port 3
Pin Fungsi
P3.0 RXD masukan port serial
P3.1 TXD keluaran port serial
P3.2 INT0 masukan interupsi 0
P3.3 INT1 masukan interupsi 1
P3.4 T0 masukan Timer/Counter 0
P3.5 T1 masukan Timer/Counter 1
P3.6 WR pulsa penulisan data memori luar
P3.7 RD pulsa pembacaan data memori luar
8. Pin 18
9. Pin 19
Berfungsi sebagai : XTAL1. Pin 19 merupakan masukan untuk rangkaian osilasi mikrokontroler.
10. Pin 20
Berfungsi sebagai : GND. Pin 20 merupakan ground dari sumber tegangan.
11. Pin 21 sampai 28
Berfungsi sebagai : P2.0_P2.7. Pin 21 sampai 28 merupakan saluran I/O 8 bit dua arah dengan internal pull-up.Saat pengambilan data dari program memori eksternal atau selama pengaksesan data memori eksternal yang menggunakan alamat 16 bit. Port 2 berfungsi sebagai saluran alamat tinggi (A8–A15). Akan tetapi, saat mengakses data memori eksternal yang menggunakan alamat 8 bit, Port 2 mengeluarkan isi P2 pada Special Function Register.
12. Pin 29
Berfungsi sebagai : PSEN. Pin ini berfungsi pada saat mengeksekusi program yang terletak pada memori eksternal. Program Strobe Enable (PSEN) akan aktif dua kali setiap cycle.
Berfungsi sebagai : ALE/PROG. Pin ini dapat berfungsi sebagai Address
Latch Enable (ALE) yang menahan low bytes address pada saat mengakses
memori eksternal. Sedangkan pada saat Flash Programming (PROG) berfungsi sebagai pulsa input selama proses pemrograman.
14. Pin 31
Berfungsi sebagai : EA/VPP. Pada kondisi low, pin ini akan berfungsi sebagai External Access Enable (EA) yaitu mikrokontroler akan menjalankan program yang ada pada memori eksternal. Jika berkondisi high, pin ini akan berfungsi untuk menjalankan program yang ada pada memori internal. Pin ini juga berfungsi sebagai masukan tegangan selama proses pemrograman.
15. Pin 32 sampai 39
Berfungsi sebagai : D7_ D0 (A7 _A0). Pin 32 sampai 39 ialah Port 0 yang merupakan saluran I/O 8 bit open collector dan dapat juga digunakan sebagai multipleks bus alamat rendah dan bus data selama adanya akses ke memori program eksternal. Saat proses pemrograman dan verifikasi, Port 0 digunakan sebagai saluran data.
16. Pin 40
2.2.2 Memori Internal AT89S52
Memori internal AT89S52 terdiri dari 3 bagian yaitu ROM, RAM dan SFR.
1. Read Only Memory (ROM)
ROM adalah memori tempat menyimpan program/source code. Sifat ROM
adalah non-volatile yaitu data/program tidak akan hilang walaupun tegangan supply tidak ada. Kapasitas ROM tergantung dari tipe mikrokontroler. Untuk AT89S52 kapasitas ROM adalah 8 KByte. ROM pada AT89S52 menempati address 0000 s/d 0FFF.
2. Random Access Memory (RAM)
RAM adalah memori tempat menyimpan data sementara. Sifat RAM adalah
volatile yaitu data akan hilang jika tegangan supply tidak ada. Kapasitas RAM
tergantung pada tipe mikrokontroler.
Pada AT89S52 RAM dibagi menjadi 2 yaitu :
A. LOWER 128 byte yang menempati address 00 s/d 7F.
RAM ini dapat diakses dengan pengalamatan langsung (direct) maupun tak langsung (indirect).
B. UPPER 128 byte yang menempati address 80 s/d FF.
3. Special Function Register (SFR)
SFR adalah register dengan fungsi tertentu. Misalnya, register TMOD dan TCON adalah timer control register yang berfungsi mengatur fasilitas timer mikrokontroler. SFR pada AT89S51 menempati address 80 s/d FF.
2.2.3 Osilator dan Clock
2.2.4 Bahasa Assembly Mikrokontroler AT89S52
Secara fisik, mikrokontroler bekerja dengan membaca instruksi yang tersimpan di dalam memori. Mikrokontroler menentukan alamat dari memori program yang akan dibaca dan melakukan proses baca data di memori. Data yang dibaca diinterprestasikan sebagai instruksi. Alamat instruksi disimpan oleh mikrokontroler di register, yang dikenal sebagai program counter. Instruksi ini misalnya program aritmatika yang melibatkan 2 register.
Mikrokontroler AT89S52 memiliki sekumpulan instruksi yang sangat lengkap. Instruksi MOV untuk byte dan bit dikelompokkan sesuai dengan mode pengalamatan (addressing modes). Mode pengalamatan menjelaskan bagaimana operand dioperasikan. Label mnemonic operand 1 operand 2 komentar (isi memori) (opcode) 4000 7430 MOV A, #35H ;copy 35H ke akumulator A Isi memori ialah bilangan heksadesimal yang dikenal oleh mikrokontroler yang merupakan representasi dari bahasa assembly yang telah dibuat. Mnemonic atau opcode ialah kode yang akan melakukan aksi terhadap operand. Operand ialah data yang diproses oleh opcode. Sebuah opcode bisa membutuhkan 1, 2 atau lebih operand, kadang juga tidak perlu operand. Sedangkan komentar dapat menggunakan tanda titik koma (;).
2.2.5 Instruksi Mikrokontroler AT89S52
1. ACALL (Absolute Call)
Instruksi ACALL digunakan untuk memanggil sub rutin program
Contoh :
START:
ACALL TUNDA ; Panggil Procedure penundaan waktu ….
TUNDA:
; Label Tunda
MOV R7,#0FFH ; Isikan Register 7 dengan data 0FFH(255)
2. ADD (Add Immediate Data)
Instruksi ini akan menambah 8 bit data langsung ke dalam isi akumulator dan menyimpan hasilnya pada akumulator.
Contoh : Add A, #data
Add A, #@R1 ; Add indirect address
Add A, R6 ; Add register
Add A, 30H ; Add memori
Instruksi ini akan membandingkan data langsung dengan lokasi memori yang dialamati oleh register R atau akumulator A. Apabila tidak sama maka instruksi akan menuju ke alamat kode.
Format : CJNE R,#data,Alamat kode
Contoh:
CJNE R7,#001H,Command ( )
MOV A,StepControl
AJMP Command1
4. CLR (Clear Accumulator)
Instruksi CLR akan mereset data akumulator menjadi 00H.
Format : CLR A
5. DEC (Decrement Indirect Address)
Instruksi DEC akan mengurangi isi lokasi memori yang ditujukan oleh register R dengan 1 dan hasilnya disimpan pada lokasi tersebut.
Contoh: DEC 40H
DEC R7 ; decrement register
Instruksi DJNZ akan mengurangi nilai register dengan 1 dan jika hasilnya sudah 0 maka instruksi selanjutnya akan dieksekusi. Jika belum 0 akan menuju ke alamat kode.
Format : DJNZ Rr,Alamat Kode
7. INC (Increment Indirect Address)
Instruksi INC akan menambahkan isi memori dengan 1 dan menyimpannya pada alamat tersebut.
Contoh: INC A
INC R7 ; increment register
8. JMP (Jump to sum of Accumulator and Data Pointer)
Instruksi JMP untuk memerintahkan loncat kesuatu alamat kode tertentu.
Format : JMP alamat kode.
Contoh :
Loop: …
RL A ; Geser data Akumulator ke kiri
ACALL Long_Delay ; Panggil Procedure penundaan waktu
9. MOV
Instruksi ini untuk memindahkan isi akumulator/register atau data dari nilai luar atau alamat lain.
Contoh :
MOV A,#40H
MOV @RO,A
MOV C, P1.0
MOV DPTR, #20H
MOVC A, @A+DPTR ; pindahkan kode memori offset dari data pointer ke A
MOVX @DPTR, A ; Pindahkan akumulator ke memori eksternal yang dialamati
; oleh data pointer
10. RET (Return from subroutine)
Instruksi untuk kembali dari suatu subrutin program ke alamat terakhir subrutin tersebut di panggil.
11. SETB (Set Bit)
Format :
SETB A.1 (memberikan logika 1 pada accumulator bit ke 1)
SETB P1.1 (memberikan logika 1 pada Port 1 bit ke 1)
12. CLRB (Clear Bit)
Instruksi CLRB untuk memberikan logika 0 pada sebuat bit data.
Format :
CLRB A.1 ; memberikan logika 0 pada accumulator bit ke 1
CLRB P1.1 ; memberikan logika 0 pada Port 1 bit ke 1
2.3 Sel Surya (Solar Cell)
Sel surya atau sel photovoltaic, adalah sebuah alat semikonduktor yang terdiri dari sebuah wilayah-besar dioda p-n junction, di mana, dalam hadirnya cahaya matahari mampu menciptakan energi listrik yang berguna. Pengubahan ini disebut efek photovoltaic. Bidang riset berhubungan dengan sel surya dikenal sebagai photovoltaics.
berhubungan dengan inverter ke grid listrik dalam sebuah pengaturan net
metering.
Gambar 2.4 Solar Cell
2.4 Penggerak Solar Cell (Solar Tracker)
Dalam penelitian ini Solar Tracker memanfaatkan dinamo sebagai penggeraknya. Dinamo merupakan motor DC yang dapat diatur posisinya dengan akurat pada posisi tertentu dan dapat berputar ke arah yang diinginkan dengan memberi sinyal-sinyal pulsa dengan pola tertentu. Biasanya dinamo digunakan untuk aplikasi-aplikasi yang membutuhkan torsi kecil dengan akurasi yang tinggi, seperti pada penggerak head pada floppy disk drive atau CD-ROM.
pada kutub–kutubnya menyebabkan medan magnet berputar yang akan menarik rotor ikut berputar.
Gambar 2.5 Dinamo
2.5 Liquid Crystal Display (LCD)
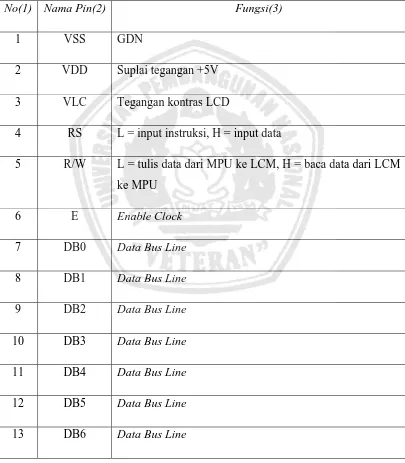
LCD merupakan salah satu komponen penting dalam pembuatan tugas akhir ini karena LCD dapat menampilkan besarnya energi listrik yang didapatkan dari solar cell. LCD mempunyai kemampuan untuk menampilkan tidak hanya angka, huruf abjad, kata-kata tapi juga simbol-simbol.
Gambar 2.6 Bentuk fisik LCD 2x16 karakter
Tabel 2.2 Fungsi pin LCD
No(1) Nama Pin(2) Fungsi(3)
1 VSS GDN
2 VDD Suplai tegangan +5V 3 VLC Tegangan kontras LCD
4 RS L = input instruksi, H = input data
5 R/W L = tulis data dari MPU ke LCM, H = baca data dari LCM ke MPU
6 E Enable Clock
7 DB0 Data Bus Line
8 DB1 Data Bus Line
9 DB2 Data Bus Line
10 DB3 Data Bus Line
11 DB4 Data Bus Line
12 DB5 Data Bus Line
(1) (2) (3)
14 DB7 Data Bus Line
15 Anoda Tegangan positif Backlight
16 Katoda Tegangan negatif Backlight
Fungsi dari masing– masing pin pada LCD adalah pin pertama dan kedua merupakan pin untuk tegangan suplai sebesar 5 volt, untuk pin ketiga harus ditambahkan resistor variabel 4K7 atau 5K ke pin ini sebagai pengatur kontras tampilan yang diinginkan.
Pin keempat berfungsi untuk memasukkan input command atau input data, jika ingin memasukkan input command maka pin 4 diberikan logic low (0), dan jika ingin memasukkan input data maka pin 4 diberikan logic high (1).
Fungsi pin kelima untuk read atau write, jika diinginkan untuk membaca karakter data atau status informasi dari register (read) maka harus diberi masukan high (1), begitu pula sebaliknya untuk menuliskan karakter data (write) maka harus diberi masukan low (0). Pada pin ini dapat dihubungkan ke ground bila tidak diinginkan pembacaan dari LCD dan hanya dapat digunakan untuk mentransfer data ke LCD.
ditransfer waktu terjadi perubahan dari high ke low, untuk membaca dari LCD dapat dilakukan ketika terjadi transisi perubahan dari low ke high.
Pin-pin dari nomor 7 sampai 14 merupakan data 8 bit yang dapat ditransfer dalam 2 bentuk yaitu 1 kali 8 bit atau 2 kali 4 bit, pin-pin ini akan langsung terhubung ke pin-pin mikrokontroler sebagai input/output. Untuk pin nomor 15-16 berfungsi sebagai backlight.
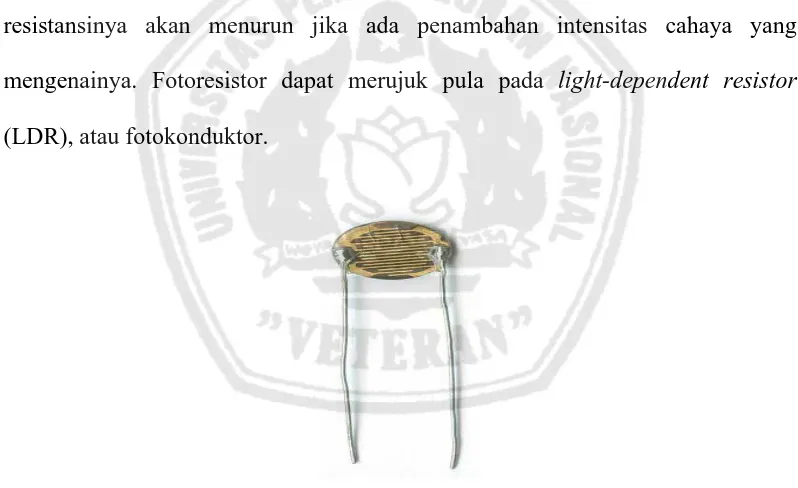
2.6 Resistor peka Cahaya / light-dependent resistor (LDR)
Resistor peka cahaya atau fotoresistor adalah komponen elektronik yang resistansinya akan menurun jika ada penambahan intensitas cahaya yang mengenainya. Fotoresistor dapat merujuk pula pada light-dependent resistor (LDR), atau fotokonduktor.
Gambar 2.7 Resistor foto
memiliki energi yang cukup untuk meloncat ke pita konduksi. Elektron bebas yang dihasilkan (dan pasangan lubangnya) akan mengalirkan listrik, sehingga menurunkan resistansinya.
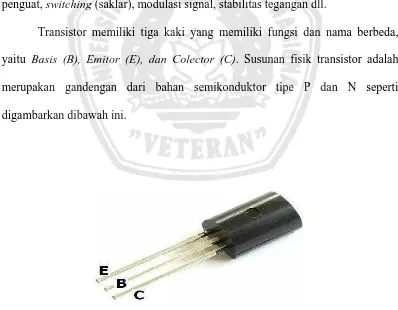
2.7 Transistor
Transistor adalah piranti elektronik yang menggantikan fungsi tabung elektron-trioda, dimana transistor ini mempunyai tiga elektroda , yaitu Emitter,
Collector dan Base. Fungsi utama atau tujuan utama pembuatan transistor adalah
sebagai penguat (amplifier), namun dikarenakan sifatnya, transistor ini dapat digunakan dalam keperluan lain misalnya sebagai suatu saklar elektronis, sebagai penguat, switching (saklar), modulasi signal, stabilitas tegangan dll.
Transistor memiliki tiga kaki yang memiliki fungsi dan nama berbeda, yaitu Basis (B), Emitor (E), dan Colector (C). Susunan fisik transistor adalah merupakan gandengan dari bahan semikonduktor tipe P dan N seperti digambarkan dibawah ini.
2.8 Relay
Relay adalah sebuah piranti elektromekanik yang dioperasikan dengan listrik yang secara mekanis mengontrol penghubungan rangkaian listrik. Relay adalah bagian yang penting dari banyak sistem kontrol, bermanfaat untuk control jarak jauh dan untuk pengontrolan alat tegangan dan arus tinggi dengan sinyal kontrol tegangan dan arus rendah. Ketika arus mengalir melalui elektromagnet pada relay kontrol elektromekanis, medan magnet yang menarik lengan besi dari jangkar pada inti terbentuk. Akibatnya, kontak pada jangkar dan kerangka relay terhubung. Relay dapat mempunyai kontak NO (Normally Open) atau kontak NC (Normally Close) atau kombinasi dari keduanya.
Gambar 2.9 Bentuk fisik Relay
Relay berfungsi untuk memutuskan atau mengalirkan arus listrik yang dikontrol dengan memberikan tegangan dan arus pada induktornya. Ada dua jenis relay berdasarkan tegangan untuk menggerakan induktornya yaitu relay AC dan relay DC.
2.9 Kapasitor (Kondensator)
energi/muatan listrik di dalam medan magnet listrik, dengan cara mengumpulkan ketidakseimbangan internal dari muatan listrik.
Struktur sebuah kapasitor terbuat dari 2 buah plat metal yang dipisahkan oleh suatu bahan dielektrik. Bahan-bahan dielektrik yang umum dikenal misalnya udara vakum, keramik, gelas dan lain-lain. Jika kedua ujung plat metal diberi tegangan listrik, maka muatan-muatan positif akan mengumpul pada salah satu kaki (elektroda) metalnya dan pada saat yang sama muatan-muatan negatif terkumpul pada ujung metal yang satu lagi. Muatan positif tidak dapat mengalir menuju ujung kutub negatif dan sebaliknya muatan negatif tidak bisa menuju ke ujung kutub positif, karena terpisah oleh bahan dielektrik yang non-konduktif. Muatan elektrik ini tersimpan selama tidak ada konduksi pada ujung-ujung kakinya.
a) Kondensator elektrolit
Kondensator elektrolit atau Electrolytic Condenser (sering
Gambar 2.10 Bentuk fisik dari kondensator elektrolit
a) Kondensator Keramik (Ceramic Capacitor)
Bentuknya ada yang bulat tipis, ada yang persegi empat berwarna
merah, hijau, coklat dan lain-lain. Dalam pemasangan di papan
rangkaian (PCB), boleh dibolak-balik karena tidak mempunyai kaki
positif dan negatif. Mempunyai kapasitas mulai dari beberapa piko
Farad sampai dengan ratusan Kilopiko Farad (KpF). Dengan tegangan
kerja maksimal 25 volt sampai 100 volt, tetapi ada juga yang sampai
ribuan volt.
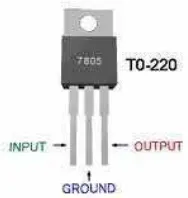
2.10 IC Regurator 7805
Adalah sebuah keluarga sirkuit terpadu regulator tegangan linier monolitik bernilai tetap. Keluarga 78xx adalah pilihan utama bagi banyak sirkuit elektronika yang memerlukan catu daya teregulasi karena mudah digunakan dan harganya relatif murah. Untuk spesifikasi IC individual, xx digantikan dengan angka dua digit yang mengindikasikan tegangan keluaran yang didesain, contohnya 7805 mempunyai keluaran 5 volt dan 7812 memberikan 12 volt. Keluarga 78xx adalah regulator tegangan positif, yaitu regulator yang didesain untuk memberikan tegangan keluaran yang relatif positif terhadap ground bersama. Keluarga 79xx adalah peranti komplementer yang didesain untuk catu negatif. IC 78xx dan 79xx dapat digunakan bersamaan untuk memberikan regulasi tegangan terhadap pencatu daya split.
IC 78xx mempunyai tiga terminal dan sering ditemui dengan kemasan TO220, walaupun begitu, kemasan pasang-permukaan D2PAK dan kemasan logam TO3 juga tersedia. Peranti ini biasanya mendukung tegangan masukan dari 3 volt diatas tegangan keluaran hingga kira-kira 36 volt, dan biasanya mempu pemberi arus listrik hingga 1.5 Ampere (kemasan yang lebih kecil atau lebih besar mungkin memberikan arus yang lebih kecil atau lebih besar).
2.11 Dioda
Dioda adalah komponen elektronika yang terbuat dari bahan semikonduktor. Dioda memiliki fungsi hanya mengalirkan arus satu arah saja. Struktur dioda adalah sambungan semikonduktor P dan N. Satu sisi adalah semikonduktor dengan tipe P dan satu sisinya yang lain adalah tipe N.
Dengan struktur demikian arus hanya akan mengalir dari sisi P menuju sisi N. Dibawah ini gambar simbol dan struktur dioda serta bentuk karakteristik dioda.
Gambar 2.13 Simbol dan struktur Dioda
2.12 Resistor
Resistor adalah komponen dasar elektronika yang digunakan untuk membatasi jumlah arus yang mengalir dalam suatu rangkaian. Kemampuan resistor dalam menghambat arus listrik sangat beragam disesuaikan dengan nilai resistansi resistor tersebut.Resistor bersifat resistif dan umumnya terbuat dari bahan karbon.
Pada bab ini dibahas mengenai beberapa hal dasar tentang bagaiman proses alat di rancang, komponen – komponen apa saja yang dibutuhkan dalam perancangan alat ini, bagaimana cara merancang alat, blok diagram, hardware alat dan analisa setelah alat tersebut disusun.
3.1 Perancangan Alat
Sesuai dengan tujuan dari perancangan ini, yakni untuk membuat suatu alat penggerak solar cell (solar tracker) yang dapat seoptimal mungkin mendapatkan panas dari sinar matahari. Maka penulis memperhatikan beberapa aspek yang dibutuhkan, yaitu :
1. Kondisi ini dapat dilakukan jika solar cell tersebut selalu tegak lurus terhadap arah fokus datangnya sinar matahari, dengan demikian solar cell harus selalu mengikuti arah pergerakan matahari.
3. Sebagai sensor peka cahaya digunakan 5 buah sensor peka cahaya (LDR), empat buah diantaranya diletakkan pada kondisi keempat penjuru mata-angin dan sebuah lagi ditempatkan ditengah-tengahnya sebagai pembanding dari masing - masing fokus yang diterima oleh LDR terkuat tersebut.
4. Kepekaan paling kuat dari LDR tersebut akan diikuti oleh pergerakan solar cell hingga terdapat nilai kepekaan yang sama antara salah satu LDR yang diikuti tersebut dengan LDR yang ditengah sebagai pembandingnya. Dengan kondisi ini maka solar cell akan selalu mendapatkan sinar matahari secara optimal disepanjang hari.
5. Selain itu pada alat nantinya terdapat LCD display sebagai unit penampil data daya yang dihasilkan oleh penerimaan energi pada solar cel.
6. Sedangkan sebagai penggerak / tracker solar cell ini menggunakan motor DC terkopel gearbox yang masing-masing track-nya digerakkan melalui sistem pemrograman pada mikrokontroler AT 89S52.
3.2 Blok Diagram
Gambar 3.1 Diagram Blok Sistem Kerja Solar Ttracker
3.3 Spesifikasi Hardware Dan Software
Dalam pembuatan alat perlu adanya penjelasan mengenai spesifikasi hardware maupun software pendukung dan susunan alat yang akan digunakan nantinya. Berikut Komponen – kompoen yang dibutuhkan :
3.3.1 Spesifikasi Hardware
1. Mikrokontroller AT89S52 7. Elco 13. Sel Surya 2. Sensor peka cahaya (LDR) 8. IC Regulator 7805
3. PCB (Printed Circuit Board) 9. Transistor 4. Dinamo 10. Resistor 5. LCD Display 11. Switch (Push-Button) 6. Dioda 12. Kabel
3.3.2 Spesifikasi Software
Berikut akan dijelaskan mengenai kebutuhan software yang dibutuhkan : 1) Proteus 7 Profesional
Proteus sebagai program yang digunakan untuk merancang rangkaian elektronik.
3.4 Cara perancangan Alat
Untuk dapat merealisasikan kebutuhan dari sistem sebagaimana tersebut diatas, Maka perlu adanya tahapan maupun cara perancanagan alat. Sehingga nantinya dalam proses penyusunanya dapat terstruktur dengan baik.
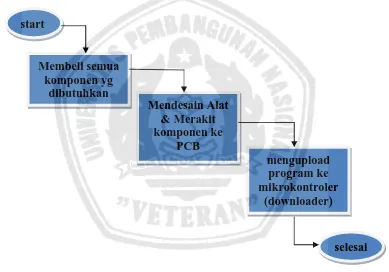
Merancang alat bukanlah hal yang mudah dan tidak dapat dilakukan oleh banyak kalangan. Dalam menjalani tugas akhir ini penulis ingin memaparkan bagaimana cara merancang alat ini. Berikut akan dijelaskan tahapan penyusunan alat :
Gambar 3.2 Tahapan penyusunan alat
Pertama, membeli semua komponen – komponen yang dibutuhkan dalam
pembuatan alat ini. Setelah membeli semua komponenya, kemudian mendesain alat sesuai dengan kebutuhan.
start
selesai Membeli semua
komponen yg dibutuhkan
Mendesain Alat & Merakit komponen ke
PCB
mengupload program ke mikrokontroler
Kedua, Setelah mendesain alat, kemudian merakit komponen- komponen
yang sudah ada ke PCB (Printed circuit Board).
Ketiga, Untuk mengupload program ke mikrokontroler maka digunakan
downloader untuk mengirim program ke CPU ke mikrokontroler.
3.5 Perancangan Alat
Berikut akan dijelaskan mengenai perancangan komponen-komponen apa saja yang akan dibuat :
3.5.1 Sistem Rangkaian Sensor Peka Cahaya
Gambar 3.3 Skematik Posisi dan Sistem Rangkaian Sensor
komparator berlogika rendah sehingga melalui pemrograman pada mikrokontroller putaran dinamo akan dihentikan.
3.5.2 Sistem Minimum Mikrokontroler AT89S52
Dalam menjalankan chip IC mikrokontroler MCS-51 memerlukan komponen elektronika pendukung lainnya. Suatu rangkaian yang paling sederhana dan minim komponen pendukungnya disebut sebagai suatu rangkaian sistem minimum. Dalam perancangan Tugas Akhir ini, sistem minimum mikrokontroler AT89S52 terdiri dari:
1. Chip IC mikrokontroler AT89S52 keluarga MCS-51 2. Kapasitor
3. Resistor
Gambar 3.4 Sistem Minimum Mikrokontroler AT89S52
Gambar 3.5 Flowchart Mikrokontroller sebagai Penggerak Solar Tracker
Berdasar diagram alir yang disusun diatas maka dapat pula dirancang suatu diagram alir berdasarkan metode pemrograman berbahasa assembler sebagai proses pengalamatan data komparator.
LDR 1,2,3,4 ?
t
y
y
t
start
LDR 1 LDR 2 LDR 3 LDR 4
Motor berputar sesuai nomer
Motor berhenti
Proses lagi?
3.5.3 Perancangan Rangkaian Driver
Rangkaian driver dirancang untuk mengaktifkan motor DC sebagai penggerak solar tracker. Kombinasi rangkaian driver ini dirancang supaya motor DC dapat berputar forward-reverse, menyesuaikan input program yang bekerja berdasar pembacaan sinyal dari LDR. Rangkaian driver ini diperlukan untuk memberikan pemisahan tegangan kontrol sebesar 5 volt yang dihasilkan dari keluaran mikrokontroller menjadi tegangan sesuai yang dibutuhkan oleh motor DC tersebut. Untuk merealisasi ide ini dilakukan dengan menggunakan transistor yang memanfaatkan tegangan kecil dari mikrokontroller sebagai pemicu diode masukannya dan memberikan tegangan yang relatif lebih besar pada transistor keluarannya. Metode reverse-foreward pada cara kerja motor DC dilakukan dengan membalik arah arus yang melalui motor, hal ini direalisasikan dengan menempatkan empat buah relay sebagai pembentuk arah arus dimana relay digerakkan dari sebuah driver BD 139 yang memicu transistor D 313.
dioda led pada pin 1, dioda tersebut akan memancarkan sinar yang diterima oleh fototransistor sehingga transistor pada sisi keluaran BD 139 menutup, hal ini menyebabkan arus pada sumber (VCC) mengalir dari Kolektor menuju Emitor dan memicu transistor pada rangkaian daya.
3.5.4 Pengukur Daya Solar Cell
Dengan memberikan sinar yang jatuh pada permukaan solar cell maka board solar cell tersebut akan menghasilkan besaran listrik pada sisi keluarannya. Untuk menunjang hal tersebut maka perlu diketahui pula besarnya daya listrik yang dihasilkan oleh sollar cell tersebut.
Untuk itu pada sistem ini juga dibuat suatu display daya listrik solar cell yang akan memantau secara realtime besarnya daya yang dihasilkan oleh solar cell. Untuk keperluan ini pada keluaran solar cell dipasang sensor arus dan sensor tegangan untuk mencuplik daya dari solar cell tersebut. Untuk mencuplik arus digunakan sensor arus yang terpasang seri terhadap solar cell.
sistem rangkaian penghubung antara solar cell dan modul Avometer sehingga didapatkan daya dari solar cell tersebut.
3.5.5 Penggerak Solar Tracker
Gambar 3.8 Rangkaian Power Supply
4.1 Kebutuhan Sistem
Ada beberapa hal dalam pengembangan sistem yang harus diperhatikan
sebelum akhirnya sampai pada langkah menjalankan program, antara lain
perangkat keras (hardware), perangkat lunak (software) serta bagaimana akhirnya
sistem dapat berjalan sesuai dengan program yang telah dibuat.
4.1.1 Perancangan Sistem
Pada bagian ini akan dijelaskan mengenai kebutuhan perangkat keras dan
perangkat lunak yang digunakan pada implementasi sistem ini. Perangkat keras
(hardware) yang digunakan adalah sebagai berikut:
1) Personal Computer (PC) untuk desain skema rangkaian, pembuatan software,
dan proses programming ke PEROM AT89S51.
2) Peralatan (downloader, kabel serial AT89_USB_ISP)
3) Komponen elektronik, antara lain :
Mikrokontroller AT89S52
Sensor peka cahaya (LDR)
PCB (Printed Circuit Board)
Dinamo
Dioda
Elco
IC Regulator 7805
Transistor
Resistor
Switch (Push-Button)
Kabel
Sel Surya
Sedangkan perangkat lunak yang digunakan dalam perancangan aplikasi
ini adalah sebagai berikut :
1) Proteus 7 Profesional
2) AT89_USB_ISP_Software
3) MIDE-51
4.2 Implementasi Alat
Pada tahapan ini akan dibahas mengenai implementasi sistem dari
perancangan alat yang telah dibahas sebelumnya. Secara detail Implementasi
tersebut akan dijelaskan dan dapat dilihat pada sub bab sebagai berikut :
4.2.1 Sistem Rangkaian Sensor Peka Cahaya
Pada sistem rangkaian peka cahaya ini dibuat menggunakan empat buah
sensor peka cahaya (LDR) yang dipasang sebagai pelacak arah fokus datangnya
layang-layang sama sisi dan di tengahnya terdapat sebuah LDR lagi yang
berfungsi sebagai pembanding kuat cahaya yang diterima oleh masing-masing
sensor pada kondisi terfokusnya. Berikut dibawah ini akan dijelaskan detail alat
dengan gambar.
Gambar 4.1 Rangkaian LDR (light-dependent resistor)
Keterangan Gambar :
a) Kabel serat
b) PCB non lubang
c) LDR (light-dependent resistor)
Setelah rangkaian komponen untuk sensor cahayanya. Maka, berlanjut
untuk membuat rangkain berikutnya. Yaitu rangkaian minimum
Mikrokontollernya.
a
b
4.2.2 Rangkaian Minimum Mikrokontroller AT89S52
Implementasi minimum AT89S51 dibuat untuk proses utama untuk
menjalankan suatu sistem kerja yang kita inginkan. Mikrokontroler AT89S52
sebuah media penyimpanan program yang kita dibuat. Berikut adalah gambar
komponen pada rangkaian minimum mikrokontrollernya.
Gambar 4.2 Rangkaian Minimum Mikrokontroller AT86S52
Keterangan Gambar :
a) Mikrokontroller AT86S52
a
b
c
d
e
f
g
b) Relay
c) ELCO
d) PCB
e) Transistor
f) Resistor
g) ELCO
h) IC Regulator 7805
4.2.3 Rangkaian Penggerak Solar Tracker
Untuk sistem rangkaian penggerak solar tracker, penyusun memanfaatkan
dinamo sebagai penggeraknya. Untuk rangkaian penggerak ini didesain
sedemikian rupa agar mampu bergerak seefektif mungkin. Tersusun menjadi dua
tingkatan, pada tiap tingkatan terdapat dinamo serta memanfaatkan PCB non
lubang sebagai media rangka. Sehingga nantinya solar sell mampu menerima
Gambar 4.3 Rangkaian penggerak solar tracker
Keterangan Gambar :
a) PCB non lubang
b) Dinamo
c) Dinamo
4.3 Implementasi Coding
Tahapan ini merupakan tahapan penyusunan program. Secara sederhana
implementasi coding akan dijelaskan pada blok-blok program dibawah ini :
;--- ;penempatan port
;---
c b a
ldr1 equ p3.0 ldr2 equ P3.1 ldr3 equ p3.2
;sensor motor atas putar kanan
;sensor motor bawah putar kiri
ldr1 equ p3.0
;--- ;program utama
;---
;jika ldr2=0 maka lompat ke lanjut1,jika ldr2=1,maka teruskan (motor bawah berputar kekkiri)
;motor atas putar kanan
;motor bawah putar kanan
;motor atas putar kiri
;motor bawah putar kiri
org 00h cek_sensor:
jnb ldr1,lanjut
acall putar_motatas_kanan lanjut:
jnb ldr2,lanjut1
acall putar_motbawah_kiri
lanjut1:
jnb ldr3,lanjut2
acall putar_motatas_kiri
lanjut2:
jnb ldr4,lanjut3
acall putar_motbawah_kanan
;lompat untuk kembali ke cek_sensor putar_motatas_kanan: jnb sw_makn,lanjut clr relay1 acall delay3 setb relay1 acall delayms clr relay3 acall delayms
Fungsi : putar_motatas_kanan ;jika sw_makn=1 maka
lanjutkan untuk memutar motor atas ke arah kanan,jika
sw_makn=0 maka lompat ke lanjut dan putaran berhenti ;clear relay1=0 (untuk memutar motor atas ke arah kanan)
;panggill fungsi delay 3 (memberi perlambatan untuk mengatur kecepatan putaran motor)
;set bit relay1=1 untuk menghentikan putaran motor ;panggill fungsi delayms (memberikan sedikit waktu untuk proses penghentian) ;relay3=0 untuk membalik putaran dalam proses pengereman
putar_motbawah_kiri:
jnb sw_mbkr,lanjut1
clr relay2
acall delay2
setb relay2
acall delayms
clr relay4
acall delayms
setb relay4
acall delay1
jb ldr2,putar_motbawah_kiri
setb relay4
setb relay2
ret
Fungsi :
putar_motatas_kiri:
jnb sw_makr,lanjut2
clr relay3
acall delay3
setb relay3
acall delayms
clr relay1
acall delayms
setb relay1
acall delay1
jb ldr3,putar_motatas_kiri
setb relay1
setb relay3
ret
putar_motbawah_kanan:
jnb sw_mbkn,lanjut3
Fungsi :
putar_motatas_kiri
Fungsi :
putar_motatas_kiri1: jb
sw_makn,putar_motatas_kanan1 loop_pmakr:
jnb sw_makr,stop
clr relay3
acall delay3
setb relay3
acall delayms
clr relay1
acall delayms
setb relay1
acall delay1
jb ldr5,loop_pmakr
setb relay1
setb relay3
Fungsi :
putar_motatas_kanan1:
jb sw_makr,loop_pmakr
loop_pmakn:
jnb sw_makn,terus
clr relay1
acall delay3
setb relay1
acall delayms
clr relay3
acall delayms
setb relay3
acall delay1
jb ldr5,loop_pmakn
setb relay3
setb relay1
Fungsi :
delayms:
mov var1,#10
d:
nop nop
djnz var1,d
djnz delay,delayms
ret delay1:
mov var2,#230
d1:
nop nop
djnz var2,d1
djnz delay,delay1
ret
4.4 Prosedur Pemasangan Program Pada Mikrokontroller AT89S52
Agar listing program yang sudah kita buat sebelumnya dapat dibaca
Mikrokontroller, maka listing program yang awalnya berekstensi .ASM harus
diconvert menjadi file.(dot) hex. Untuk memasang program pada Chip AT89S52
pertama-tama program yang sudah dibuat sebelumnya harus dicompile terlebih
dahulu, untuk memastikan tidak ada error, karena jika ada yang error maka
program tidak akan bisa dibuat.
4.4.1 Download Program Ke dalam Mikrokontroler
Untuk proses donwload program ke dalam IC mikrokontroler software
yang digunakan adalah AT89_USB_ISP_Software. Pada proses pembuatan
program, program diketik dalam bahasa assembler. Kemudian di compile dalam
dalam bentuk hex. Untuk menulis program dalam bahasa asembler kita bisa
memanfaatkan teks editor, seperti notepad, editor dos, dsb. Setelah kita menulis
program dalam teks editor, kita perlu simpan file kita dengan ekstensi .asm,
kemudian kita simpan pada folder dengan lokasi yang sama dengan lokasi copiler
ASM51.
Berikut dibawah ini akan dijelaskan tahapan dalam mengcompile file
program menjadi file berekstensi .hex :
Tuliskan program dalam page M-IDE studio MCS-51 dalam bahasa
Assembly (ASM52 assembler), kemudian simpan program misal di D:\DEVIN
DOCUMENT\Skripsi Ku\LAPORAN TA\Program, kemudian lanjut lakukan
proses Build current file seperti tampak pada Gambar 4.5. Apabila tidak terjadi
error maka pada tampilan bawah akan muncul pesan seperti yang ditunjukan
dalam Gambar 4.6
Gambar 4.5 Proses Build current file
Gambar 4.6 Proses tidak terjadi error
Setelah proses build sukses selanjutnya buka software
tidak memerlukan proses instalasi (portable) sehingga akan lebih mudah dan
praktis digunakan.
Gambar 4.7 Tampilan starter software AT89_USB_ISP
Kemudian Dialog Device Selection akan muncul saat perangkat lunak
DT-HiQ AT89 USB ISP baru dijalankan atau bila menu Options → Device Select
dipilih. Jendela dialog ini berfungsi untuk menentukan tipe IC target dan nilai
Gambar 4.8 Pemilihan tipe IC dan Kristal
Pilihlah tipe IC target melalui combobox yang disediakan serta nilai
Kristal terdekat, lalu tekan tombol “OK”. DT-HiQ AT89 USB ISP akan
melakukan verifikasi tipe target IC apakah sesuai dengan pilihan (jika target IC
mendukung instruksi pembacaan Signature Byte).
Jika verifikasi berhasil, maka tampilan utama perangkat lunak akan aktif
kembali serta pilihan instruksi yang disediakan akan disesuaikan dengan tipe IC
target. Jika proses verifikasi gagal tetapi pengguna yakin bahwa pilihan tipe IC
target sudah benar (mungkin hanya signature byte IC yang rusak), maka pengguna
dapat menekan tombol “Cancel” pada jendela dialog ini. Kemudian memilih tipe
target melalui combobox di pojok kanan atas tampilan utama. Dengan memilih
melalui combobox di tampilan utama, walaupun proses verifikasi gagal, pilihan
Kemudian kita load file.hex yang kita buat sebelumnya lewat menu Load
File. Kemudian kita cari file berekstensi hex yang sebelumnya telah berhasil kita
compile pada tahapan sebelumnya.
Gambar 4.9 Open file.hex
Setelah berhasil melakukan load file, maka program sudah siap untuk dilakukan
Write/penulisan ke mikrokontrolernya.
Sebagai Catatan, DT-HiQ AT89 USB ISP mencakup semua fitur
pemrograman pada semua IC yang didukung. Karena masing-masing IC memiliki
fitur yang berbeda, maka pilihan fitur pemrograman bergantung pada jenis IC
yang dipilih. Seperti tampak pada jendela software AT89_USB_ISP terdapat
beberapa tombol serta fungsi – fungsi antara lain akan dijelaskan pada tabel
dibawah ini :
Tabel 4.1 Tabel fungsi Menu File
Menu Fungsi
Load File Membuka file Intel HEX atau file biner dan memasukkannya ke
Save File Menyimpan isi Read Buffer ke dalam file Intel HEX atau file biner
Recent File Menampilkan daftar 10 file yang terakhir dibuka
Exit Keluar dari perangkat lunak
Tabel 4.2 Tabel fungsi Menu Intructions
Menu(1) Fungsi(2) Blank Check Memeriksa apakah IC target kosong
Erase Menghapus IC target
Read FLASH Membaca memori program IC target dan memasukkannya ke
dalam Read Buffer
Write FLASH
Menulis kode yang tersimpan dalam File Buffer ke dalam memori program IC target
(1) (2)
Verify FLASH
Membandingkan isi File Buffer dan memori program IC target
Read EEPROM
Membaca memori data EEPROM IC target dan memasukkannya ke dalam Read Buffer
Write EEPROM
Menulis kode yang tersimpan dalam File Buffer ke dalam memori data EEPROM IC target
Verify EEPROM
Membandingkan isi File Buffer dan memori data EEPROM IC target
Lockbit Settings
Memunculkan jendela dialog untuk pengaturan Lockbit
Fusebit Settings
Memunculkan jendela dialog untuk pengaturan Fusebit
Auto
Programming
Pengujian alat dilakukan untuk mengetahui apakah fungsi – fungsi yang telah direncanakan bekerja dengan baik atau tidak. Pengujian alat juga berguna untuk mengetahui tingkat kinerja dari fungsi tersebut. Setelah dilakukan pengujian, maka hendaknya melakukan ujian ukuran / analisa dan terhadap apa yang diuji untuk mengetahui keberhasilan dari alat yang di buat.
5.1 Pengujian Alat
Pengujian terhadap sistem yang telah dibuat, secara garis besar terdapat dua hal yang diujikan yaitu pengujian terhadap bagian pengendali (Solar Tracker) dan bagian yang dikendalikan, yakni rangkaian solar selnya. Dari kedua pengujian tersebut dapat diketahui kelemahan dan kekurangan yang masih terdapat pada alat, sehingga hasil perancangan perangkat keras (hardware) maupun perangkat lunak (software) dapat lebih disempurnakan untuk tujuan dan pemanfaatan secara nyata.
5.1.1 Pengujian Catu Daya
digunakan IC 7805. Dari masing-masing regulator telah diukur untuk mengetahui optimalisasi pemakaian tegangan catu, yaitu IC 7805 seharusnya menghasilkan tegangan 9 Volt secara konstan.
5.1.2 Pengujian Sistem Penggerak Solar Tracker
Skenario pengujian rangkaian penggerak dilakukan dengan memanfaatkan sinar dari cahaya senter. Sudut cahaya yang datang dari cahaya senter diasumsikan sebagai sudut datang cahaya matahari dengan intensitas tertinggi. Rangkaian penggerak ini akan bergerak mengikuti arah datangnya sinar yang mengenai LDR.
Gambar 5.1 Rangkaian LDR
Tabel 5.1 Hasil Pengujian Pergerakan Motor
LDR
STATUS
PERGERAKAN
Terkena Cahaya Tak terkena Cahaya Motor Atas Motor Bawah
1 Ya ‐ Putar Kanan stop
2 Ya ‐ Putar Kiri stop
3 Ya ‐ stop Putar kanan
4 Ya ‐ stop Putar Kiri
5 Ya ‐ Putar Kanan/kiri stop
Tabel 5.2 Hasil Pengujian Rangkaian LDR tahap1
LDR
STATUS
STATUS LED
Terkena Cahaya
Tak terkena
Cahaya Menyala Mati
1 Ya ‐ ‐ ya
‐ ya ya ‐
2 Ya ‐ ‐ ya
‐ ya ya ‐
3 Ya ‐ ‐ ya
‐ ya ya ‐
4 Ya ‐ ya
‐ ya ya ‐
5 Ya ‐ ‐ ya
Tabel 5.3 Hasil Pengujian Rangkaian LDR tahap2 lampu senter
Percob
ke‐ Jarak Cahaya LED
STATUS
LDR
1,2,3,4,5 LDR 1 LDR 2 LDR 3 LDR 4 LD
1 0,5 cm Off Focus fokus fokus fokus fo
2 2 cm Off Focus fokus fokus fokus fo
3 5 cm Off Focus fokus fokus fokus fo
4 10 cm Off Focus fokus fokus fokus fo
5 20 cm Off Focus fokus fokus fokus fo
6 30 cm Off Focus fokus fokus fokus fo
7 50 cm On tdk focus tdk fokus tdk fokus tdk fokus tdk
8 1 m On tdk focus tdk fokus tdk fokus tdk fokus tdk
9 2m On tdk focus tdk fokus tdk fokus tdk fokus tdk
10 5 m On no respon no respon no respon no respon no r
5.1.3 Pengujian Rangkaian Solar Cell
Rangkaian solar cell disusun sedemikian rupa hingga mampu menghasilkan energi/daya keluaran yang dapat