PASCA STROKE
NAMA : Tri Andi SetiawanNRP : 2112201003
DOSEN PEMBIMBING
Prof. Dr. Ing. Ir. I Made Londen Batan, M. Eng
PROGRAM MAGISTER
BIDANG KEAHLIAN SISTEM MANUFAKTUR JURUSAN TEKNIK MESIN
FAKULTAS TEKNOLOGI INDUSTRI
INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA
STROKE PATIENTS
By : Tri Andi SetiawanNRP : 2112201003
SUPERVISOR
Prof. Dr. Ing. Ir. I Made Londen Batan, M. Eng
MASTER PROGRAMME
FIEL STUDY OF MANUFACTURING SYSTEM DEPARTEMENT OF MECHANICAL ENGINEERING FACULTY OF INDUSTRIAL TECHNOLOGY
Nama Mahasiswa : Tri Andi Setiawan
NRP : 2112201003
Pembimbing : Prof. Dr.Ing. Ir. I Made Londen Batan, M.Eng
ABSTRAK
Beragam jenis dan model alat bantu terapi stroke telah diciptakan, salah satunya adalah sepeda terapi fisik roda tiga yang dirancang dengan tujuan selain sebagai alat bantu terapi fisik juga dirancang sebagai alat transportasi bagi pasien penderita pasca stroke, fungsi terapi difokuskan pada organ tangan dan kaki, yaitu dengan gerakan mengayun pada tangan dan gerakan mengayuh pada kaki, sepeda roda tiga produk existing memiliki dimensi dan berat yang besar, sehingga menyulitkan saat sepeda ini harus dibawa dan disimpan, serta radius beloknya yang besar membuat sepeda ini kurang efisien digunakan di area sempit, pada penelitian ini dilakukan pengembangan desain sepeda.
Metode pengembangan yang digunakan adalah pengembangan produk terintegrasi, yaitu evaluasi terhadap produk existing melalui observasi dan wawancara kepada 10 responden, serta berdasarkan penelitian yang terkait masalah kebutuhan penderita pasca stroke terhadap alat bantu terapi fisik. Pada pengembangan ini dibuat 5 konsep sepeda yang selanjutnya dilakukan analisa fungsi dan kekuatan, kemudian dipilih berdasarkan kriteria dimensi umum, dimensi lipat, berat, radius belok, keamanan dan kenyamanan. Konsep terpilih selanjutnya dirancang lebih detail dan dibuat dokumen dalam bentuk gambar teknik.
Dari penelitian ini dihasilkan sebuah desain sepeda roda tiga sebagai alat bantu terapi fisik dan alat transportasi bagi penderita pasca stroke yang memiliki dimensi yang lebih kecil, beratnya lebih ringan, bisa dilipat, sehingga mudah untuk dibawa dan disimpan di dalam bagasi mobil, serta memiliki radius belok yang lebih kecil. Dari rancangan alat terapi ini diharapkan dapat dijadikan reverensi dalam pembuatan alat bantu terapi fisik berupa sepeda roda tiga untuk penderita pasca stroke dalam terapi fisik dan peregangan otot.
By : Tri Andi Setiawan Student Identity Number : 2112201003
Supervisor : Prof. Dr.Ing. Ir. I Made Londen Batan, M.Eng
ABSTRACT
Various types and models of stroke therapy aids have been created, one of which is physical therapy three-wheeled bike designed with purpose other than as a physical therapy tool is also designed as a means of transportation for people with post-stroke patients, therapy is focused on the function of the hands and feet organs, namely the rocking motion of the hand and foot pedaling motion, tricycle existing products have large dimensions and weight, so it's difficult when the bike should be taken and stored, as well as a large beloknya radius makes this bike less efficiently used in a narrow area, the study this made the development of bicycle design.
The method used is the development of integrated product development, namely the evaluation of existing products through observation and interviews of 10 respondents, as well as related issues based on the research needs of the post-stroke patients to physical therapy aids. In the development of the concept bike that was made 5 further analyzed the function and strength, then selected based on the criteria of the general dimensions, folding dimensions, weight, turning radius, safety and comfort. Selected concepts in more detail subsequently designed and fabricated documents in the form of engineering drawings.
From this study produced a tricycle design as a tool for physical therapy and a means of transportation for post-stroke patients who have smaller dimensions, weighs less, can be folded, making it easy to carry and stored in the trunk of the car, and has a turning radius smaller. From the design of this therapeutic tool is expected to be used in the manufacture reverensi physical therapy aids in the form of a tricycle for post-stroke patients in physical therapy and muscle stretching.
Puji syukur kehadirat ALLAH SWT yang telah melimpahkan rahmat dan hidayah-Nya, sehingga dapat terselesaikannya tesis yang berjudul
PENGEMBANGAN DESAIN SEPEDA UNTUK PASIEN PASCA STROK disusun sebagai persyaratan untuk memperoleh gelas Magister Teknik pada program Studi Teknik Mesin, bidang keahlian Sistem Manufaktur, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember Surabaya.
Penulisan tesis ini dapat terlaksana dengan baik atas bantuan, dukungan serta dorongan dari berbagai pihak. Untuk itu, penulis mengucapkan terima kasih yang sedalam-dalamnya kepada:
1. Bapak Prof. Dr. Ing. Ir. I Made Londen Batan, M. Eng selaku dosen pembimbing tesis ini. Terima kasih untuk waktu, masukannya, kritik, saran, dan motivasi yang telah diberikan, tanpa itu semua sampai sekarang saya tidak akan dapat menyelesaikan tesis ini.
2. Bapak Prof. Dr. Ir. Wajan Berata, DEA, Prof. Ir. I Nyoman Sutantra, Msc., PhD dan Ir. Yusuf Kaelani, MSc. E yang telah bersedia menjadi dosen pembahas tesis ini.
3. Seluruh Dosen, staff dan karyawan dilingkungan Program Pasca Sarjana Teknik Mesin ITS.
4. Keluarga yang selalu memberi dukungan, do’a dan semangat.
5. Teman-teman di Lab. Perancangan dan Pengembangan Produk (Lab. P-3), terima kasih atas segala dukungan, bantuan dan saran-sarannya.
6. Semua pihak yang telah berperan dalam penyusunan tesis ini, yang tidak bisa disebutkan satu persatu.
Penulis menyadari bahwa dalam penulisan tesis ini masih banyak kekurangan, Sebagai tanggung jawab atas segala kekurangan, penulis membuka diri untuk segala kritik dan masukan.
JUDUL PENELITIAN INDONESIA……….……...……… i
JUDUL PENELITIAN INGGRIS……….……...……….……… ii
LEMBAR PENGESAHAN ... iii
ABSTRAK ... iv
ABSTRACT ... v
KATA PENGANTAR ... vi
DAFTAR ISI ... vii
DAFTAR GAMBAR ... xi
DAFTAR TABEL ... xvii
DAFTAR LAMPIRAN ... xix
BAB 1 PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Perumusan Masalah ... 2
1.3 Batasan Masalah ... 3
1.4 Tujuan dan Manfaat Penelitian ... 3
BAB 2 KAJIAN PUSTAKA DAN DASAR TEORI 2.1 Stroke ... 5
2.2 Rehabilitasi Pasca Stroke... 6
2.3 Analisa Beban dan Tegangan ... 13
2.4 Teori Kegagalan ... 14
2.4.1 Teori Tegangan Normal Maksimum (Rankie) ……… 14
2.4.2 Teori Tegangan Geser Maksimum (Tresca) ... 16
2.4.3 Teori Kegagalan Regangan Normal maksimum (MNST) …….. 16
2.5 Faktor Keamanan... 16
2.6 Dasar Teori Dinamika Kendaraan ... 18
2.7 Rapid Upper Limb Assesment (RULA) ……...………... 22
2.8 Teori Pengembangan dan Pemilihan Konsep ……...……….. 24
2.8.1 Pengembangan Konsep ... 24
2.8.2 Pemilihan Konsep ... 25
BAB 3 METODE PENELITIAN 3.1 Identifikasi dan Perumusan Masalah ... 30
3.2 Studi Literatur ... 30
3.3 Kajian Produk Existing ... 30
3.4 Identifikasi dan Penyusunan Daftar Kebutuhan ... 30
3.5 Pembuatan Konsep ... 31
3.6 Analisa Fungsi... 31
3.7 Analisa Kekuatan Rangka... 31
3.8 Pemilihan Konsep ... 32
3.9 Perancangan detail komponen (konsep terpilih)... 35
3.10 Pembuatan Detail Gambar Teknik... 36
3.11 Kesimpulan dan Saran... 36
BAB 4 PEMBAHASAN 4.1 Kajian Produk Existing ... 37
4.2 Identifikasi dan Penyusunan Daftar Kebutuhan ... 39
4.3 Pembuatan Konsep ... 41 4.3.1 Alternatif Konsep 1... 42 4.3.2 Alternatif Konsep 2... 44 4.3.3 Alternatif Konsep 3... 45 4.3.4 Alternatif Konsep 4... 47 4.3.5 Alternatif Konsep 5... 50
4.4.1.4 Analisa Konsep 4... 55 4.4.1.5 Analisa Konsep 5... 55 4.4.2 Operasional... 56 4.4.2.1 Analisa Konsep 1... 56 4.4.2.2 Analisa Konsep 2... 57 4.4.2.3 Analisa Konsep 3... 58 4.4.2.4 Analisa Konsep 4... 58 4.4.2.5 Analisa Konsep 5... 59
4.5 Analisa Kekuatan Rangka... 60
4.5.1 Analisa Rangka Konsep 1... 61
4.5.2 Analisa Rangka Konsep 2... 62
4.5.3 Analisa Rangka Konsep 3... 63
4.5.4 Analisa Rangka Konsep 4... 64
4.5.5 Analisa Rangka Konsep 5... 65
4.6 Pemilihan Konsep... 67
4.6.1 Berdasarkan Dimensi Umum ... 67
4.6.2 Berdasarkan Dimensi Lipat ... 68
4.6.3 Berdasarkan Berat... 69
4.6.4 Berdasarkan Radius Belok ... 72
4.6.5 Berdasarkan Keamanan ... 77
4.6.6 Berdasarkan Kenyamanan ... 84
4.7 Penetapan Konsep Terpilih... 67
BAB 5 PERANCANGAN KOMPONEN SEPEDA UNTUK PASIEN PASCA STROKE 5.1 Komponen Sistem Penggerak Kayuh Tangan dan Kemudi ... 102
5.1.1 Komponen No.1 (handlebar) ... 102
5.1.2 Komponen No.2 (head tube) ... 102
5.1.7 Komponen No.15 (pen) ... 110
5.1.8 Komponen No. 20 (kokel) dan No.21 (Break levers)... 110
5.2 Komponen Sistem Penggerak Kayuh Kaki ... 111
5.3 Komponen Pengaman (safety seats) ... 113
5.4 Analisa Beban Dinamis ... 114
5.5 Gaya-Gaya pada Rangka ... 118
5.6 Evaluasi Rangcangan Konsep Terpilih ... 121
BAB 6 KESIMPULAN DAN SARAN ... 125
DAFTAR PUSTAKA ... 127 BIOGRAFI PENELITI
Gambar 1.1 Sepeda terapi fisik roda tiga (Rodika, 2013) ... 1
Gambar 2.1 Rehabilitasi robotik untuk terapi stroke (Jezernik et al., 2004).. 7
Gambar 2.2 Virtual environment untuk terapi stroke (Edmans et al., 2006) 7 Gambar 2.3 Alat Terapi Treadmill ... 8
Gambar 2.4 Alat Terapi Sepeda Statis ... 8
Gambar 2.5. Sepeda RLF untuk Penderita Hemiparese Pasca Stroke ... 9
Gambar 2.6 Sepeda roda tiga untuk pasien pasca stroke (Rodika, 2013) ... 10
Gambar 2.7 Posisi titik berat Sepeda roda tiga (Rodika, 2013) ... 10
Gambar 2.8 Detail komponen sepeda roda tiga (Rodika, 2013) ... 11
Gambar 2.9 Beban terkonsentrasi ... 13
Gambar 2.10 Beban terdistribusi... 13
Gambar 2.11 Klasifikasi beban berdasarkan lokasi aplikasinya ... 14
Gambar 2.12 Kinematika Kendaraan Belok Tanpa Sudut Slip(Sutantra,2000)18 Gambar 2.13 Gaya dan momen pada kendaraan belok ... 20
Gambar 2.14 Kendaraan Sederhana dengan Belok Datar (Sutantra, 2000) .. 20
Gambar 2.15 RULAEmployee Assessment Worksheet (McAtamney, 1993) ... 23
Gambar 2.16 Faktor yg mempengaruhi pengembangan konsep(Batan, 2012) 25 Gambar 2.17 Tahapan pemilihan konsep (Ulrich, 2003) ... 26
Gambar 3.1 Diagram alir pengembangan sepeda untuk pasien pasca stroke 29 Gambar 4.1 Prototipe sepeda untuk pasien pasca stroke ( Rodika, 2013) .... 37
Gambar 4.2 Dimensi utama sepeda untuk pasien pasca stroke ( Rodika, 2013)38 Gambar 4.3 Konsep 1 ... 42
Gambar 4.4 Skema konsep lipatan konsep 1 ... 43
Gambar 4.5 Konsep 2 ... 44
Gambar 4.6 Skema konsep lipatan konsep 2 (Top View) ... 45
Gambar 4.7 Konsep 3 ... 46
Gambar 4.8 Mekanisme pengaturan panjang garpu (Top View) ... 46
Gambar 4.13 Pengaturan jarak pedal ... 48
Gambar 4.14 Mekanisme lipat konsep 4 ... 49
Gambar 4.15 Konsep 5 ... 50
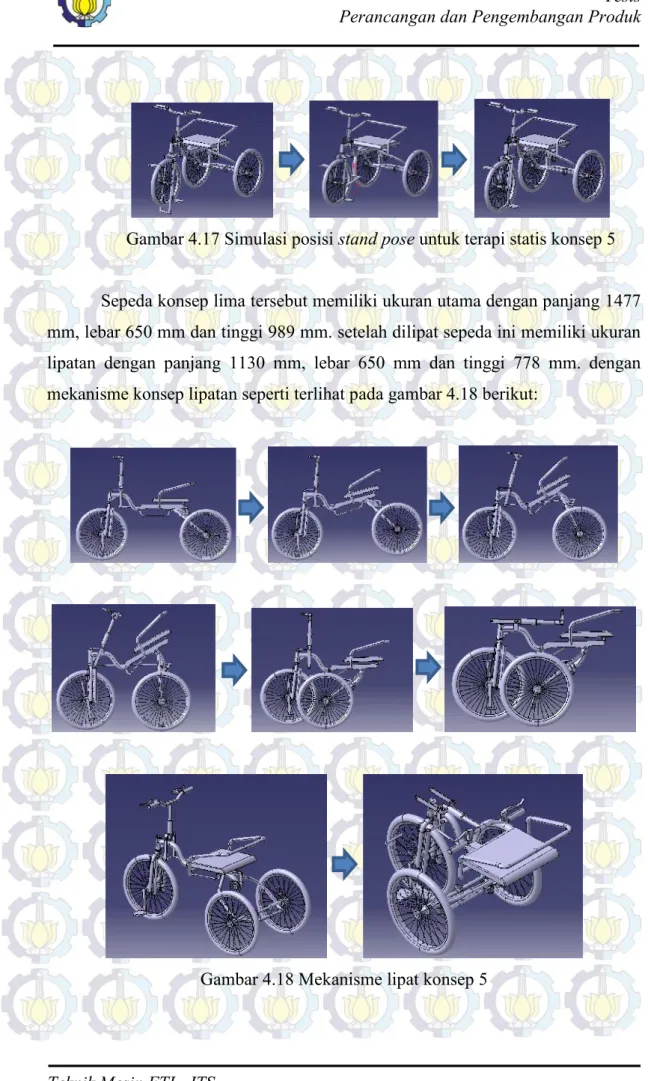
Gambar 4.16 Simulasi penggerak tangan Konsep ... 50
Gambar 3.17 Simulasi posisi stand pose untuk terapi statis konsep 5 ... 51
Gambar 4.18 Mekanisme lipat konsep 5 ... 51
Gambar 4.19 Toolbar clash ... 52
Gambar 4.20 Analisa fungsi gerak kemudi posisi normal dan belok maksimal konsep 1 ... 52
Gambar 4.21 Analisa fungsi pedal posisi vertikal dan horisontal konsep 1 . 53 Gambar 4.22 Analisa fungsi gerak kemudi posisi normal dan belok maksimal konsep 2 ... 53
Gambar 4.23 Analisa fungsi pedal posisi vertikal dan horisontal konsep 2 . 54 Gambar 4.24 Analisa fungsi gerak kemudi posisi normal dan belok maksimal konsep 3 ... 54
Gambar 4.25 Analisa fungsi pedal posisi vertikal dan horisontal konsep 3 . 54 Gambar 4.26 Analisa fungsi gerak kemudi posisi normal dan belok maksimal konsep 4 ... 55
Gambar 4.27 Analisa fungsi pedal posisi vertikal dan horisontal konsep 4 . 55 Gambar 4.28 Analisa fungsi gerak kemudi posisi normal dan belok maksimal konsep 5 ... 56
Gambar 4.29 Analisa fungsi pedal posisi vertikal dan horisontal konsep 5 . 56 Gambar 4.30 Simulasi sudut gerak kaki konsep 1 ... 56
Gambar 4.31 Simulasi sudut gerak tangan konsep 1 ... 57
Gambar 4.32 Simulasi sudut gerak kaki konsep 2 ... 57
Gambar 4.33 Simulasi sudut gerak tangan konsep 2 ... 57
Gambar 4.40 Distribusi beban & pengikatan rangka depan dan belakang
konsep 1 ... 61
Gambar 4.41 Simulasi tegangan rangka depan dan belakang konsep 1 ... 62
Gambar 4.42 Distribusi beban dan pengikatan rangka konsep 2 ... 62
Gambar 4.43 Simulasi tegangan rangka konsep 2 ... 63
Gambar 4.44 Distribusi beban dan pengikatan rangka konsep 3 ... 63
Gambar 4.45 Simulasi tegangan rangka depan konsep 3 ... 64
Gambar 4.46 Distribusi beban dan pengikatan rangka konsep 4 ... 64
Gambar 4.47 Simulasi tegangan rangka depan konsep 4 ... 65
Gambar 4.48 Distribusi beban dan pengikatan rangka belakang konsep 5 ... 66
Gambar 4.49 Desain rangka belakang dengan penopang pada daerah kritis 66 Gambar 4.50 Simulasi tegangan rangka belakang konsep 5 ... 67
Gambar 4.51 Simulasi berat rangka konsep 1 ... 69
Gambar 4.52 Simulasi berat rangka konsep 2 ... 70
Gambar 4.53 Simulasi berat rangka konsep 3 ... 70
Gambar 4.54 Simulasi berat rangka sepeda konsep 4 ... 71
Gambar 4.55 Simulasi berat rangka sepeda konsep 5 ... 71
Gambar 4.56 Derajat belok konsep 1 ... 72
Gambar 4.57 Posisi titik berat sepeda konsep 1 ... 72
Gambar 4.58 Derajat belok konsep 2 ... 73
Gambar 4.59 Posisi titik berat sepeda konsep 2 ... 74
Gambar 4.60 Derajat belok konsep 3 ... 74
Gambar 4.61 Posisi titik berat sepeda konsep 3... 75
Gambar 4.62 Derajat belok konsep 4 ... 75
Gambar 4.63 Posisi titik berat sepeda konsep 4... 76
Gambar 4.64 Derajat belok konsep 5 ... 76
Gambar 4.65 Posisi titik berat sepeda konsep... 77
Gambar 4.66 Simulasi kemungkinan cidera konsep 1 ... 78
Gambar 4.71 posisi titik berat sepeda konsep 1... 80
Gambar 4.72 posisi titik berat penegendara konsep 2 ... 81
Gambar 4.73 posisi titik berat penegendara konsep 3 ... 82
Gambar 4.74 posisi titik berat pengendara konsep 4 ... 82
Gambar 4.75 posisi titik berat pengendara konsep 5 ... 83
Gambar 4.76 Analisa RULA posisi diam konsep 1... 84
Gambar 4.77 Analisa posisi badan sisi kiri dengangerak mengayun ... 85
Gambar 4.78 Analisa posisi badan sisi kanan dengan gerak mengayun ... 85
Gambar 4.79 Analisa posisi badan sisi kiri saat belok ... 86
Gambar 4.80 Analisa posisi badan sisi kanan saat belok ... 86
Gambar 4.81 Analisa RULA posisi diam konsep 2... 87
Gambar 4.82 Analisa posisi badan sisi kiri saat belok ... 87
Gambar 4.83 Analisa posisi badan sisi kanan saat belok ... 88
Gambar 4.84 Analisa posisi kayuh sisi badan sebelah kiri... 88
Gambar 4.85 Analisa posisi kayuh sisi badan sebelah kanan... 89
Gambar 4.86 Analisa RULA posisi diam konsep 3... 89
Gambar 4.87 Analisa posisi kayuh sisi badan sebelah kiri... 90
Gambar 4.88 Analisa posisi kayuh sisi badan sebelah kanan... 90
Gambar 4.89 Analisa posisi belok sisi badan sebelah kanan... 90
Gambar 4.90 Analisa posisi belok sisi badan sebelah kiri... 91
Gambar 4.91 Analisa RULA posisi diam konsep 4... 91
Gambar 4.92 Analisa posisi kayuh sisi badan sebelah kiri... 92
Gambar 4.93 Analisa posisi kayuh sisi badan sebelah kanan... 92
Gambar 4.94 Analisa posisi belok sisi badan sebelah kiri... 92
Gambar 4.95 Analisa posisi belok sisi badan sebelah kanan... 93
Gambar 4.96 Analisa RULA posisi diam konsep 4... 93
Gambar 5.3 Bentuk masing-masing komponen ... 101
Gambar 5.4 Komponen sitem penggerak kayuh tangan & Kemudi... 102
Gambar 5.5 Head tube dan batang tuas kemudi... 103
Gambar 5.6 Distribusi beban,pengikatan dan simulasi tegangan head tube .. 105
Gambar 5.7 Distribusi beban dan pengikatan batang tarik ... 106
Gambar 5.8 Simulasi tegangan batang tarik... 106
Gambar 5.9 Distribusi beban,pengikatan dan simulasi tegangan tuas pedal.. 107
Gambar 5.10 Roller chain definition... 107
Gambar 5.11 Distribusi beban,pengikatan dan simulasi tegangan rear axle . 108 Gambar 5.12 Desain poros dan sambungan terhadap sprocket... 109
Gambar 5.13 Poros dan pasak ... 109
Gambar 5.14 Distribusi beban,pengikatan dan simulasi tegangan pen... 110
Gambar 5.15 Roda depan dan pedal sepeda roda tiga... 111
Gambar 5.16 Sepeda roda satu ... 111
Gambar 5.17 Distribusi beban,pengikatan dan simulasi tegangan fork leg ... 112
Gambar 5.18 Simulasi proses naik dengan memanfatakan safety seats... 112
Gambar 5.19 Distribusi beban pengikatan dan simulasi tegangan safety seats...113
Gambar 5.20 Pemodelan jalan berlubang (Chardy, 2007) ... 111
Gambar 5.21 Penambahan peyangga rangka belakang ... 116
Gambar 5.22 Simulasi Tegangan peyangga rangka belakang... 117
Gambar 5.23 Rangka Sepeda. A,B,C,D,E,F,G, adalah titik simpul ... 118
Gambar 5.24 Diagram benda bebas pada titik A... 119
Gambar 5.25 Diagram benda bebas pada titik B... 119
Gambar 5.26 Diagram benda bebas pada titik E ... 120
Gambar 5.27 Diagram benda bebas pada titik F ... 121
Gambar 5.28 Radius putar sepeda ... 122
Tabel 2.2 Jumlah Kayuhan kaki dalam Waktu 1 Menit responden pasca
stroke ... 12
Tabel 2.3 Peningkatan Jumlah Kayuhan Responden pasca Stroke... 12
Tabel 2.4 Tegangan tarik dan tekan pada material... 15
Tabel 2.5 Faktor keamanan pada material... 18
Tabel 2.6 Jangkauan nilai tingkat resiko cedera... 19
Tabel 2.7 Matrik penyaringan konsep (sketsa) ... 27
Tabel 2.8 Matrik penilaian konsep ... 27
Tabel 3.1 Matrik penilaian konsep ... 32
Tabel 3.2 Dimensi konsep awal dan dimensi konsep lipat... 33
Tabel 3.3 Perbandingan dimensi ... 33
Tabel 3.4 Kriteria keamanan ... 34
Tabel 3.5 Analisa RULA posisi diam dan mengayuh ... 35
Tabel 3.6 Analisa RULA posisi belok... 35
Tabel 4.1 Spesifikasi sepeda roda tiga Rodika (2013) ... 39
Tabel 4.2 Daftar kebutuhan produk sepeda tertapi fisik ... 41
Tabel 4.3 Simulasi sudut gerak badan... 60
Tabel 4.4 Dimensi umum masing-masing konsep ... 68
Tabel 4.5 Dimensi umum dan dimensi lipat... 68
Tabel 4.6 Perbandingan dimensi dan volume lipat ... 68
Tabel 4.7 Berat rangka masing-masing konsep... 71
Tabel 4.8 Kriteria keamanan ... 84
Tabel 4.9 Analisa RULA posisi diam dan mengayuh ... 95
Tabel 4.10 Analisa RULA posisi belok... 96
Tabel 4.11 Pemilihan konsep ... 97
Tabel 5.1 Spesifikasi konsep terpilih ... 99
Lampiran 1 Gambar Kerja Sepeda Pasca Stroke... 128
Lampiran 2 Gambar Kerja Kemudi... 129
Lampiran 3 Gambar Kerja Head Tube... 130
Lampiran 4 Gambar Kerja As dan Gir Belakang... 131
Lampiran 5 Gambar Kerja Roda Depan... 132
Lampiran 6 Gambar Kerja Fork Leg... 133
Lampiran 7 Gambar Kerja Stand Pose... 134
Lampiran 8 Gambar Kerja Crank... 135
Lampiran 9 Gambar Kerja Tuas Ayun Tangan ... 136
Lampiran 10 Gambar Kerja Swing ... 137
Lampiran 11 Gambar Kerja Rangka Tengah dan Safety Seats ... 138
Lampiran 12 Gambar Kerja Rangka Depan ... 139
Lampiran 13 Gambar Kerja Rangka Belakang ... 140
Lampiran 14 Gambar Kerja Rangka Belakang Side View... 141
Lampiran 15 Gambar Kerja Pecahan ... 142
Lampiran 16 Gambar Kerja Rangka Belakang Rear View ... 143
Lampiran 17 Gambar Kerja Rangka Belakang Top View ... 144
Lampiran 18 Gambar Kerja Kokel... 145
Lampiran 19 Katalog Deep Groove Ball Bearing... 146
BAB 1
PENDAHULUAN
1.1 Latar BelakangMelihat seriusnya dampak yang dapat ditimbulkan oleh penyakit stroke dan pentingnya penanganan yang harus dilakukan penderita pasca stroke melalui terapi fisik, pada tahun 2013 telah dilakukan perancangan suatu alat terapi fisik oleh Rodika (2013) yaitu sebuah sepeda yang dapat membantu penderita pasca stroke meregangkan otot sebagai alat bantu terapi pemulihan pasca stroke, berdasarkan uji jumlah kayuhan responden pasca stroke dalam 30 hari (1 bulan) menyatakan kenaikan persentase jumlah kayuhan setiap hari adalah; pada responden A adalah 7,33%, responden B adalah 5,28 %, responden C adalah 3,33 % dan responden D adalah 3,97 % (Riva’i, 2013).
Berdasarkan data tersebut dapat diartikan bahwa sistem kayuh mampu meningkatkan kinerja otot dan kordinasi gerak tubuh, sepeda roda tiga tersebut dapat juga digunakan penderita stroke melakukan mobilitas sendiri ke tempat-tempat tertentu, seperti ke rumah kawan, berkeliling di halaman rumah, ke lapangan, atau ke tempat umum lainya. Seperti terlihat pada gambar 1.1 berikut:
Sepeda pasca stroke yang dibuat memiliki ukuran panjang 1937mm, lebar total 1010mm, dan tinggi total mencapai 905mm. Ukuran tersebut masih terlalu besar jika sepeda ini difungsikan untuk di daerah perkotaan yang mempunyai jalan sempit. Disamping itu radius belok sepeda besar, yaitu mencapai 3 meter, butuh lokasi yang luas untuk bisa memanfaatkan sepeda terapi ini. Rangkanya yang panjang dan lebar membuat sepeda ini cukup sulit dibawa ke lain lokasi, butuh kendaraan sejenis pickup untuk mengangkutnya, jika ingin diangkut menggunakan mobil keluarga sejenis MPV (Multi-Purpose Vehicle) sepeda ini harus dibongkar, dan membutuhkan waktu hampir 4 jam untuk merakit kembali, untuk membongkar pasang membutuhkan peralatan bongkar pasang, sepeda ini cukup berat karena terbuat dari baja tebal yaitu mencapai 30 kg untuk rangka saja, belum termasuk roda dan komponen lainya, untuk mengangkatnya dibutuhkan 2 sampai 3 orang. Desain kayuh pada tangan dihubungkan dengan rangkaian penggerak pada kayuh kaki, hal ini membuat sistem penggerak menjadi tumpang tindih satu sama lain, hal ini kurang efektif dan menimbulkan masalah saat pemakaian karena sistem kayuh kaki akan bergerak saat kayuh tangan digunakan, mengharuskan pemakai memindahkan kaki dahulu saat ingin menggunakan kayuh tangan. Perawatan dan perbaikanya komponenya juga tentunya akan lebih sulit.
Untuk itu dikembangkan sepeda terapi roda tiga yang memiliki dimensi lebih kecil, ringan, bisa dilipat, sehingga mudah dibawa dan disimpan di bagasi mobil. Disamping itu sepeda yang dirancang harus memiliki radius belok yang kecil, sehingga dipakai di daerah perkotaan.
Dari rancangan alat terapi ini diharapkan dapat dijadikan reverensi dalam pembuatan alat bantu terapi fisik berupa sepeda roda tiga untuk penderita pasca stroke dalam terapi fisik dan peregangan otot.
1.2 Perumusan Masalah
Berdasarkan latar belakang tersebut maka dapat dirumuskan suatu permasalahan sebagai berikut:
1. Bagaimana merancang sepeda roda tiga untuk pasien pasca stroke yang memiliki dimensi lebih kecil dari produk existing yaitu dibawah 1937mm x 1010mm x 905mm.
2. Bagaimana merancang sepeda roda tiga untuk pasien pasca stroke yang lebih ringan dari produk existing yaitu dibawah 30 kg.
3. Bagaimana merancang sepeda roda untuk pasien pasca stroke yang bisa dilipat sehingga mudah untuk dibawa dan disimpan.
4. Bagaimana merancang sepeda roda tiga yang memiliki radius belok lebih kecil dari produk existing yaitu dibawah 3m.
5. Bagaimana merancang sepeda roda tiga yang memiliki dimensi kecil, ringan, bisa dilipat, aman, nyaman dan dapat dimanfaatkan sebagai alat bantu terapi fisik pasien pasca stroke.
6. Bagaimana melakukan seleksi konsep untuk menentukan konsep terbaik. 1.3 Batasan Masalah
Batasan masalah yang ditetapkan agar dalam penulisan penelitian ini lebih terarah serta dapat mencapai tujuan yang diinginkan adalah sebagai berikut:
1. Rancangan hanya pada rangka utama sepeda. 2. Sepeda terapi tidak dirancang di medan berat
3. Komponen standar tidak dirancang (memakai komponen yang tersedia di pasaran).
4. Sepeda terapi diperuntukkan bagi penderita stroke yang sudah mampu menyangga badan, dan mampu duduk.
5. Pengendara dengan tinggi antara 150-180 cm (antropometri tubuh manusia Indonesia).
6. Pembebanan hanya diakibatkan oleh berat rangka sepeda dan pengendara yang diasumsikan sebesar 100 kg.
7. Analisa kenyamanan sepeda dilakukan dengan metode RULA (Rapid Upper Limb Assessment).
9. Tidak termasuk dalam proses pembuatan sepeda. 10. Tidak membahas desain dan proses perakitan. 1.4 Tujuan penelitian
Tujuan yang ingin dicapai dari penelitian ini adalah:
1. Merancang desain konsep sepeda yang memiliki dimensi yang lebih kecil dari produk existing yaitu dibawah 1937mm x 1010mm x 905mm.
2. Merancang sepeda roda tiga untuk pasien pasca stroke yang lebih ringan dari produk existing yaitu dibawah 30 kg.
3. Merancang sepeda roda untuk pasien pasca stroke yang bisa dilipat sehingga mudah untuk dibawa dan disimpan.
4. Merancang sepeda roda tiga yang memiliki radius belok lebih kecil dari produk existing dibawah 3m.
5. Merancang sepeda roda tiga yang memiliki dimensi kecil, ringan, bisa dilipat, aman, nyaman dan dapat dimanfaatkan sebagai alat bantu terapi fisik pasien pasca stroke.
6. Untuk mengetahui cara melakukan seleksi konsep untuk menentukan konsep terbaik.
BAB 2
KAJIAN PUSTAKA DAN DASAR TEORI
2.1 StrokeStroke atau yang dalam bahasa inggris dikenal dengan cerebrovascular accidnt (CVA) adalah suatu keadaan dimana suplai darah ke otak mengalamai gangguan. Dalam jaringan otak, kurangnya aliran darah menyebabkan serangkaian reaksi biokimia, yang dapat merusakkan atau mematikan sel saraf otak. Kematian jaringan otak dapat menyebabkan hilangnya fungsi yang dikendalikan oleh jaringan itu. Stroke adalah penyebab kematian yang ketiga di amerika serikat dan banyak negara industri di eropa(Jauch, 2005). Bila dapat diselamatkan, kadang-kadang penderita mengalami kelumpuhan dianggota badannya, hilangnya sebagian ingatan atau kemampuan bicara.
WHO mendefinisikan bahwa stroke adalah gejala-gejala defisit fungsi susunan saraf yang diakibatkan oleh penyakit pembuluh darah otak. Stroke berdasarkan patologi anatomi dibagi menjadi dua jenis yaitu: stroke iskemik dan stroke hemoragik. Stroke iskemik yaitu tersumbatnya pembuluh darah yang menyebabkan aliran darah ke otak sebagian atau keseluruhan terhenti. 80% stroke adalah stroke Iskemik, berdasarkan penyebabnya terbagi menjadi 3 jenis yaitu trombotik yang disebabkan oleh terbentuknya thrombus. Thrombus akan menyebabkan penggumpalan darah sehingga aliran darah tidak lancar atau terhenti. Jenis kedua adalah stroke embolik yang sebabkan oleh tertutupnya pembuluh arteri oleh pembekuan darah. Jenis ketiga adalah hipoperfusion sistemik yaitu berkurangnya aliran darah ke seluruh bagian tubuh karena adanya gangguan denyut jantung (Bastian, 2011).
Stroke hemoragik adalah stroke yang disebabkan oleh pecahnya pembuluh darah otak. Hampir 70% kasus stroke hemoragik terjadi pada penderita hipertensi. Stroke hemoragik berdasarkan lokasi terjadinya perdarahan terbagi menjadi dua yaitu hemoragik intraselebral dan hemoragik subaraknoid. Stroke yang disebabkan oleh perdarahan di dalam jaringan otak disebut stroke hemoragik
ruang subaraknoid yaitu ruang sempit antara permukaan otak dengan lapisan jaringan yang menutupi otak (Bastian, 2011).
2.2 Rehabilitasi Pasca Stroke
Dengan kemajuan teknologi, stroke lebih sering meninggalkan kecacatan dibanding kematian. Beban biaya yang harus ditanggung akibat stroke sangatlah besar bagi pasien dan keluarganya, tidak hanya berhenti sampai di situ saja efek dari penyakit stroke akan semakin berat setelahya, apa lagi penderita pasca serangan stroke meninggalkan cacat yang berat, penderita dan keluarga akan semakin terbebani, rehabilitasi yang dilakukan pada pasien stroke semakin lama akan semakin aktif disesuaikan dengan keadaan kesehatan pasien. Peranan keluarga sangat penting dalam program rehabilitasi stroke di rumah. Ketika penderita stroke sudah kembali ke rumah penderita stroke akan lebih banyak berinteraksi dengan keluarganya dibandingan dengan terapis yang hanya datang beberapa jam ke rumah (Brass, 1992).
Keberhasilan program rehabilitasi sangat tergantung pada peran terapis dan pelaksananya. Dua jenis teknologi yang banyak diteliti dalam upaya menciptakan rehabilitasi berbasis teknologi untuk melatih anggota gerak atas (upper limb) adalah rehabilitasi robotic dan virtual environment (Kwakkel et al.,2008; Burridge dan hughes,2010). Seperti terlihat pada Gambar 2.1, suatu alat terapi fisik dikembangkan oleh Jazernik et al. (2004). Disamping itu alat bantu tersebut berfungsi melatih penderita stroke supaya bisa berjalan kembali yang juga dirancang untuk penderita pasca stroke yang mengalami cedera tulang belakang.
Gambar 2.1 Rehabilitasi robotik untuk terapi stroke (Jezernik et al., 2004) Pada Gambar 2.2 diperlihatkan suatu metode terapi fisik yang dikembangkan oleh Edmans et al. (2006) dengan menggunakan interaksi tiga dimensi dengan mensimulasikan gerakan pasien yang disinkronkan dengan gerakan animasi dilayar computer, hal tersebut terlihat seolah olah pasien melakukan gerakan nyata.
Gambar 2.2 Virtual environment untuk terapi stroke (Edmans et al., 2006) Alat terapi lain yang sudah diaplikasikan panda penderita pasca stroke adalah tredmill, treadmill merupakan salah satu alat olah raga kebugaran statis, merupakan alat olah raga yang menerapkan system kerja konveyor sehingga penderita stroke dapat berlatih berjalan, latihan berjalan yang terstruktur dan
Gambar 2.3 Alat Terapi Treadmill
Sumber: http://whatisbesttreadmill.com/threadmill-new/trade-mill/
Baru baru ini alat terapi yang banyak dikenal oleh masyarakat adalah suatu alat terapi kayuh yang sangat sederhana, penderita hanya tinggal duduk di kursi dan alat terapi diletakkan di hadapan penderita, terapi sepeda statis ini dapat digunakan pada pasien yang sakit stroke saja melainkan diperuntukkan juga untuk penderita pengapuran, nyeri lutut, atau pasca kecelakaan untuk melatih kaki, lutut atau persendiannya. Seperti yang telihat pada gambar 2.4 alat ini dilengkapi dengan setelan berat / ringan kayuhan & pengatur panjang. dengan berat 4 kg dan ukuran 65 x 65 x 35 cm alat ini cukup ringan dan kecil.
Gambar 2.4 Alat Terapi Sepeda Statis Sumber: http://www.sepeda-statis.blogspot.com/
Pada tahun 2012 dirancang sepeda RLF untuk rehabilitasi kelemahan otot-otot hemiparase pasca stroke , dimana koordinasi kinerja fungsi kecepatan putaran pedal, pola rangsangan listrik, sudut penyulutan dan posisi geometri tubuh akan menggantikan peran kecerdasan otak penderita yang hilang. Selain itu terdapat pengaruh rangsangan listrik fungsional terhadap peningkatan kekuatan dan keserasian kaki mengayuh pada penderita hemiparese karena peran kecerdasan tiruan sepeda RLF sebagai pengganti peran otak pada orang sehat.
Gambar 2.5 Sepeda RLF untuk Penderita Hemiparese Pasca Stroke
Sumber: http://prasetya.ub.ac.id/berita/Disertasi-Arie-Eric-Rawung-Pengaruh-Variasi-RLF-Terhadap-Penderita-Hemiparese-7970-id.html
Pada tahun 2013 dirancang suatu sepeda roda tiga oleh Rodika, sepeda didesain dengan dua roda di depan dan satu roda dibelakang. Dilengkapi dengan pedal kayuh, dimana posisi kaki pengendara berada agak ke depan dan pergerakan kaki dengan cara dikayuh, transmisi menggunakan rantai dan sproket bertingkat. Selain menggunakan kaki sepeda ini juga dapat menggunakan tangan sebagai pengayuh, dimana posisi tangan berada pada tuas stang dan pergerakannya dengan cara menarik tuas dan mendorongnya, untuk pergerakan belok dengan cara menggerakkan tuas kekanan dan ke kiri, transmisi menggunakan tuas dan eksentrik serta diteruskan rantai dan sprocket.
Gambar 2.6 Sepeda roda tiga untuk pasien pasca stroke (Rodika, 2013) Titik berat pengendara pada sepeda ini berada pada jarak 843 mm dari permukaan tanah, 830 mm dari sumbu roda depan dan 584 mm dari sumbu roda belakang, seperti terlihat pada gambar berikut;
Gambar 2.7 Posisi titik berat Sepeda roda tiga (Rodika, 2013) W Wf a=830 1414 Wr h= 84 3 b=584
Gambar 2.8 Detail komponen sepeda roda tiga (Rodika, 2013) Tabel 2.1 Detail Komponen Sepeda sepeda roda tiga
No Nama Komponen Jumlah Keterangan
1 Rangka 1
2 Roda Belakang 1 26 inch 3 Roda Depan 2 20 inch
4 Sadel 1
5 Tuas Kemudi 1
6 Pedal Kayuh 1 Untuk ukuran roda 26’ 7 Dudukan Tuas Kemudi 1
8 Shockbreker 1 Untuk ukuran roda 26’ 9 Plat Eksentrik 1
10 Sproket Bertingkat 2 7 Tingkatan 11 Sproket Eksentrik 1 5 Tingkatan 12 Tuas Belok 1
13 Tuas Dudukan Roda Depan 1 14 Tuas Eksentrik 1
15 Rem Pack 1 Untuk ukuran roda 26’ 16 Poros Dudukan Sproket 1 Untuk ukuran roda 26’ 17 Tuas Penerus Belok 1
18 Tuas Penerus Kemudi 1
19 Bearing 4 Untuk ukuran roda 26’ 20 Poros Penerus Eksentrik 1
Sumber: Rodika, 2013
Berdasarkan uji kayuhan kaki pada responden pasca stroke oleh Riva’i (2013) Secara umum dapat dikatakan, bahwa sepeda yang dirancang bermanfaat bagi penderita pasca stroke, dari hasil yang ditunjukan oleh Tabel 2.2 dimana
kemajuan kesehatan pada pependerita pasca stroke, dimana dengan latihan tersebut otot-otot dan kekakuan tubuh (badan) penderita sudah mulai menurun.
Tabel 2.2 Jumlah Kayuhan kaki dalam Waktu 1 Menit responden pasca stroke Responden
pasca stroke
Percobaan ke
1 2 3 4 5 6 7 8 9 10
Jumlah kayuhan (putaran/menit)
A 10 12 14 17 20 21 22 24 26 32
B 12 15 16 18 20 21 23 26 29 31
C 13 14 17 19 20 21 22 24 25 26
D 21 22 25,5 26 31,5 32 32,5 41 44 46
Sumber: Riva’i, 2013
Tabel 2.3 Peningkatan Jumlah Kayuhan Responden pasca Stroke Responden
Jumlah kayuhan
(per menit) Kenaikan
(%) Keterangan
Awal Akhir
A 10 32 220 Rata-rata kenaikan jumlahkayuhan setiap hari dalam 30 hari (1 bulan ) adalah 7,33%
B 12 31 158,33
Rata-rata kenaikan jumlah kayuhan setiap hari dalam 30 hari (1 bulan ) adalah 5,28%
C 13 26 100
Rata-rata kenaikan jumlah kayuhan setiap hari dalam 30 hari (1 bulan ) adalah 3,33%
D 21 46 119,05
Rata-rata kenaikan jumlah kayuhan setiap hari dalam 30 hari (1 bulan ) adalah 3,97% Sumber: Riva’i, 2013
2.3 Analisa Beban dan Tegangan
Analisa beban berdasarkan daerah pembebanan dapat diklasifikasikan menjadi dua yaitu beban terkonsentrasi dan beban terdistribusi, beban terkonsentrasi adalah beban yang diaplikasikan pada daerah yang sangat kecil di bandingkan dengan luas komponen yang dibebani, dapat diidealisasikan menjadi beban terkonsentrasi pada suatu titik, seperti pada Gambar 2.9, dan pada Gambar 2.10 memperlihatkan gambar beban yang terdistribusi terdistribusi pada daerah tertentu, Berdasarkan lokasi dan metoda aplikasi beban serta arah pembebanan, beban dapat diklasifikasikan menjadi: beban normal, beban geser, beban lentur, beban torsi, dan beban kombinasi. Ilustrasi masing-masing beban ini ditunjukkan pada gambar 2.11
Gambar 2.9 Beban terkonsentrasi
Gambar 2.11 Klasifikasi beban berdasarkan lokasi aplikasinya: (a) normal tarik, (b) normal tekan, (c) geser,(d) lentur, (e) torsi, (f) kombinasi
Sumber: http://masmukti.files.wordpress.com/ 2.4 Teori Kegagalan
Kegagalan pada suatu elemen mesin dapat terjadi dalam berbagai wujud seperti misalnya yielding, retak, patah, scoring, pitting, korosi, aus, dan lain-lain. Agen penyebab kegagalan juga bermacam-macam seperti misalnya salah design, beban operasional, kesalahan maintenance, cacat material, temperatur, lingkungan, waktu, dan lain-lain.
2.4.1 Teori Tegangan Normal Maksimum (Rankine)
Teori berdasarkan hasil eksperimen insinyur inggris W. J. M. Rankine (1857) sehingga disebut juga teori Rankine, kegagalan suatu material terjadi bila tegangan normal maksimum mencapai suatu harga tegangan luluh atau tegangan patahnya, tanpa memperhatikan tegangan utama (principal stess) lainya, kriteria ini cocok untuk material getas (brittle materials), Sesuai dengan teori ini, jika luluh dianggap gagal dan material mempunyai tegangan yield tarik Syt dan
tegangan yield tekan Syc serta faktor keamanan adalah N maka akan terjadi
kegagalan bila: N S maksimum yt t (2.1)
N S maksimum yc
c
(2.2)
dengan patah dianggap gagal maka: N S maksimum ut t (2.3) N S maksimum uc c (2.4)
dimana: σt = Tegangan tarik maksimum desain
σc = Tegangan tekan maksimum desain
Sut = Tegangan tarik maksimum material
Suc = Tegangan tekan maksimum material
N = Faktor keamanan
Tabel 2.4 Tegangan tarik dan tekan pada material
Material Strength, MPaUltimate Yield Strength,MPa Tensile Shear Tensile Shear Aluminium alloy
(extruded) 2014-T66061-T6 414262 241207 365241 214135 Cast iron GrayMalleable 210370 330- 250- 165
-Magnesium alloy, AM 100A 275 145 150
Steel 0.2% Carbon (hot roller) 450 330 250 165 0.6% Carbon (hot roller) 690 550 415 250 0.6% Carbon (quenched) 825 690 515 310 3.5% Ni, 0.4% C 1380 1035 1035 620 Sumber: E.P. Popov, 1981
bisa saja berupa gaya. Kalau F dinaikkan, sampai suatu besaran tertentu, sedemikian rupa sehingga jika dinaikkan sedikit saja akan mengganggu kemampuan mesin tersebut, untuk melakukan fungsi secara semestinya.
2.4.2 Teori Tegangan Geser Maksimum (Tresca)
Teori ini pertama kali di kemukakan oleh C.A. Coulomb(1773) dan kemudian oleh H.Tresca (1864), teori ini menyatakan bahwa suatumaterial yang mendapatkan beban tegangan biaxial atau tegangan triaxial dinyatakan gagal bila tegangan geser maksimum yang terjadi pada titik mencapai tegangan luluh geser dari material tersebut.
(2.5) 2.4.3 Teori Kegagalan Regangan Normal Maksimim (Maximum Normal Strain
Theory)
Disebut sebagai teori kegagalan St.Vernant karena pertama kali diusulkan oleh Barre de St.Vernant (1855). Menyatakan bahwa material akan gagal bila regangan normal maksimum yang terjadi melewati harga limit regangan normal material hasil tes standar. Teori ini baik dipergunakan pada porselin, beton, desain senjata dan silinder berdinding tebal.
2.5 Faktor Keamanan
Penentuan Faktor keamanan digunakan untuk mengevaluasi agar perancangan elemen mesin terjamin keamananya dengan dimensi umum yang didefinisikan sebagai sebagai perbandingan antara tegangan maksimum dengan beban yang dirancang.
Dalam desain konstruksi mesin, besarnya angka keamanan harus lebih besar dari 1 (satu). Faktor keamanan diberikan agar desain konstruksi dan komponen mesin dengan tujuan agar desain tersebut mempunyai ketahanan terhadap beban yang diterima.
Pemilihan SF harus didasarkan pada beberapa hal sebagai berikut : • Jenis beban
• Jenis material
• Proses pembuatan / manufaktur • Jenis tegangan
• Jenis kerja yang dilayani • Bentuk komponen
Dan faktor yang harus dipertimbangkan dalam penentuan faktor keamananyaitu:
1. Ketahanan sifat-sifat pada material selama proses pembebanan. 2. Kehandalan pada saat menerima pembebanan.
3. Tingkat pembebanan.
4. Tingkat kurangnya umur komponen saat terjadi kegagalan. 5. Kerugian material bila terjadi kegagalan.
Penentuan faktor keamanan haruslah cermat karena tingginya faktor keamanan akan menyebabkan besarnya dimensi komponen dan borosnya material dilain pihak faktor keamanan yang rendah menyebabkan besarnya resiko yang tidak diinginkan. Makin besar kemungkinan adanya kerusakan pada komponen mesin, maka angka keamanan diambil makin besar. Angka keamanan beberapa material dengan berbagai beban dapat dilihat pada Tabel 2.5 sebagai berikut:
Tabel 2.5 Faktor keamanan pada material `
Sumber: Thrower, 1986
2.6 Dasar Teori Dinamika kendaraan
Dinamika kendaraan sesungguhnya amatlah rumit karena ia dapat menggambarkan perilaku gerak kendaraan, perilaku arah serta stabilitas arah kendaraan, kenyamanan kendaraan, dan keamanan kendaraan yang terkait dengan kecelakaan kendaraan pada saat jalan.
2.6.1 Kinematika kendaran belok
Kondisi ideal dari kendaraan belok adalah disebut juga sebagai kondisi ackerman yaitu dimana pada semua roda tidak terjadi sudut slip, sehingga arah gerak dari roda sama dengan arah bidang putar dari roda.
Gambar 2.12 Kinematika Kendaraan Belok Tanpa Sudut Slip (Sutantra, 2000) Keterangan:
O = pusat sumbu putar sesaat
Rack = radius belok ideal (ackerman) (meter) Ѳi = sudut belok ideal (º)
Β = sudut slip kendaraan (º)
δf = sudut steer rata-rata roda depan (º)
Besarnya radius belok ideal (ackerman) secara sederhana dapat ditentukan dengan menggunakan persamaan (Sutantra, 2000):
Rack= 57,29 (2.7)
dimana:
Rack : dalam satuan meter
a,b : dalam satuan meter δf : dalam satuan derajat
Sudut side slip ( β ) dapat dihitung secara sederhana dengan menggunakan persamaan trigonometri (Sutantra, 2000).
β = (2.8)
2.6.2 Dinamika kendaraan belok pada jalan datar
Dalam menganalisa dinamika kendaraan belok untuk menghindari kompleksitas yang dapat membingungkan, maka pada analisa awal ini kendaraan dianggap merupakan satu body kaku yang utuh tanpa ada pengaruh dari suspensi.lihat gambar.
Gambar 2.13 Gaya dan momen pada kendaraan belok Sumber: http://belalankthempure.files.wordpress.com/
2.6.2.1 Analisa Skid
Jika terjadi Skid pada saat berbelok maka akan mengakibatkan kendaraan akan sulit untuk dikendalikan dan hal inilah yang sering
mengakibatkan terjadinya kecelakaan lalu lintas. Skid pada roda depan akan tidak terjadi jika gaya kesamping pada roda depan lebih kecil atau sama dengan gaya gesek yang mampu didukung oleh roda depan, begitu juga pada roda belakng Skid tidak akan terjadi jika gaya geseknya masih mampu menahan gaya kesamping yang terjadi.
Gambar 2.14 Kendaraan Model Sederhana dengan Belok Datar (Sutantra, 2000) h µ Fg R W t/2 t/2 µ Fc
Analisa Skid Belok Datar Fc > Fg Dimana:
=
Kondisi kritis jika Fc = Fg
(a) Jadi kecepatan maksimum yang diijinkan agar tidak skid adalah
(2.9)
2.6.2.2 Analisa guling
Dimaksudkan untuk mencari kondisi terjadinya salah satu roda
depan atau belakang atau satu roda belakang dan depan terangkat. Terangkatnya salah satu roda atau kedua roda tersebut adalah menunjukkan adanya
kemungkinan kendaraan akan terguling. Dalam hal ini kendaraan dikatakan akan dapat mengalami bahaya terguling jika pada saat belok ada roda yang terangkat. Jika satu roda depan terangakat maka kendaraan dikatakan
kendaraan dalam keadaan kritis akan terguling ke depan, untuk roda belakang yang terangkat maka dikatakan kritis akan terguling kebelakang, dan kalau roda depan dan belakang sudah ada yang terangkat maka kendaraan kritis akan terguling total. Kondisi guling akan bisa terjadi kalau roda kiri kendaraan mulai terangkat atau gaya normal pada roda kiri adalah 0
Dengan demikian kondisi guling akan terjadi jika:
Fc. h > W. t/2 (2.10)
Kondisi kritis adalah jika: F . h > W. t/2
Jadi kecepatan maksimum yang diijinkan agar kendaraan tidak guling dapat dirumuskan sebagai berikut (Sutantra I Nyoman, 2000):
(2.11) Analisa koefisien gesek roda dan jalan.
Jika persamaan (a) dan (b) digabungkan akan didapat:
µ.M.g.h = M.g.t/2 (2.12)
Jadi koefisien gesek roda yang ideal antara ban dan jalan agar kendaraan terbebas dari skip atau guling adalah:
=
(2.13)2.7 Rapid Upper Limb Assessment (RULA)
Rula (Rapid Upper Limb Assesment) adalah suatu metode ergonomi yang digunakan untuk mengurangi terjadinya resiko yang berhubungan dengan pekerjaan seseorang pada tubuh. RULA ditemukan oleh Dr. Lynn Mc Atamney dan Profesor E. Nigel Corlett pada tahun 1993 di Nothingham, Inggris. Faktor aktifitas yang akan mempengaruhi resiko cedera adalah sebagai berikut (McAtamney, 1993):
1. Posisi kerja yang tidak alami.
2. Pengulangan pekerjaan pada satu jenis otot 3. Penggunaan tenaga yang berlebihan
4. Posisi kerja otot yang static.
5. Terjadi kontak bagian tubuh dengan lingkungan ataupun peralatan kerja. 6. Metode/cara kerja
7. Jam kerja yang terlalu panjang.
Pengukuran tingkat resiko cedera dapat dilakukan dengan mengukur postur dan posisi bagian tubuh seseorang dalam melakukan aktivitas kerja(McAtamney & Corlett, 1993), bagian tubuh adalah:
1. Lengan (lengan atas) 2. Siku tangan (lengan bawah) 3. Pergelangan tangan
4. Leher 5. Trunk 6. Kaki
Pada Gambar 2.15 adalah gambar RULA Employee Assessment Worksheet yang digunakan untuk mencari skor dari postur dan posisi tubuh. Selanjutnya dari nilai nilai itulah yang digunakan sebagai dasar suatu benda dapat ditentukan nilai kenyamananya, apakah nyaman digunakan atau perlu dirancang ulang untuk dilakukan perubahan, analisa RULA dapat ditentukan menggunakan software seperti CATIA.
Dari hasil skor penilaian postur dan posisi badan selanjutnya nilai tersebut dapat dicari nilai grand score yaitu tingkatan yang bernilai 1 sampai 7 yang menunjukkan tingkat risiko cedera pada anggota tubuh bagian atas (upper limb), setelah itu grand score tersebut lalu diklasifikasikan menjadi 4 action level (McAtamney & Corlett, 1993) yaitu dapat di lahat pada Tabel 2.6.
Tabel 2.6 Jangkauan nilai tingkat resiko cedera
Sumber: McAtamney, 1993
1. Action Level 1: yaitu grand score 1 atau 2 menunjukkan bahwa postur masih dapat diterima selama tidak dipertahankan atau diulang untuk waktu yang lama.
2. Action Level 2: yaitu grand score 3 atau 4 menunjukkan bahwa dibutuhkan pengkajian lebih lanjut dan mungkin membutuhkan perubahan.
3. Action Level 3: yaitu grand score 5 atau 6 menunjukkan bahwa dibutuhkan pengkajian lebih lanjut dan dibutuhkan perubahan segera. 4. Action Level 4: yaitu grand score 7 menunjukkan bahwa dibutuhkan
pengkajian dan perubahan sesegera mungkin (mendesak). 2.8 Teori Pengembangan dan Pemilihan Konsep
Dalam pengembangan atau pemilihan konsep, konsep yang dimaksud adalah berupa desin produk, dapat berupa gambar susunan atau berupa sketsa yang dilengkapi dengan bagian-bagian utama jika memungkinkan disertai dengan cara kerja produk (Batan, 2012).
2.8.1 Pengembangan Konsep
Secara mendasar dapat dikatakan bahwa ada dua faktor yang mendasari pengembangan konsep, yaitu faktor internal dan faktor eksternal, faktor internal adalah faktor yang datang dari ide, keinginan, angan-angan, dan cita-cita desainer bersama tim, baik bidang produksi maupun kontrol kualitas, maupun bidang
Range Nilai Kemungkinan timbul cedera pada postur tubuh 1 dan 2 Diterima.
3 dan 4 diperlukanDibutuhkan penyelidikan lebih jauh dan mungkin saja perubahan 5 dan 6 Dibutuhkan penyelidikan dan perubahan segera
pemasaran yang sering dimasukkan kedalam tim perancangan & pengembangan produk (Ulrich2003, Batan2006). Sedangkan faktor eksternal adalah faktor yang mempengaruhi keberadaan sebuah produk yang datang dari luar tim (perusahaan), misalkan seperti: konsumen, pasar, industri atau masyarakat, ahli perancangan produk, saat ini ada dua model pegembangan yang banyak diterapkan yaitu model kombinasi dan model morfologi.
Gambar 2.16 Faktor yang mempengaruhi pengembangan konsep (Batan, 2012) 2.8.2 Pemilihan Konsep
Pemilihan konsep berdasarkan matrik keputusan dikembangkan oleh Suatrt pugh pada tahun 1980-an yang dikenal dengan metode seleksi pugh (pugh conception selection), metode ini dibagi menjadi dua bagian yaitu penyaringan konsep dan penilaian konsep, penyaringan konsep ditujukan untuk meruncingkan atau merampingkan jumlah konsep secara cepat dan selanjutnya mengembangkan menjadi konsep yang lebih baik untuk dievaluasi pada tahap penilaian konsep, sedangkan penilaian konsep ditujukan untuk memilih sebuah konsep menjadi konsep akhir atau konsep terpilih (Batan, 2012).
Gambar 2.17 Tahapan pemilihan konsep (Ulrich, 2003) Menurut Ulrich (2003), ada 6 tahapan untuk menyaring konsep:
Persiapan matrik seleksi
Membuat rate konsep
Membuat ranking konsep
Membuat kombinasi dan pengembangan konsep
Pemilihan satu atau lebih konsep, dan
Penerimaan hasil dan proses selanjutnya
Keenam tahapan tersebut dimasukkan kedalam matrik seleksi, untuk membandingkan satu konsep dengan konsep lainnya disarankan untuk membuat atau menetapkan konsep referensi.
Ratekonsep untuk mengevaluasi sebuah konsep ditetapkan dengan nilai relatif konsep terhadap konsep referensi (produk eksisting) pada masing-masing kriteria dengan tanda (+, 0, -). Jika sebuah konsep: lebih baik daripada konsep referensi, pada evaluasi diberi tanda +; jika sama dengan konsep referensi diberi tanda 0; atau bila konsep baru lebih buruk daripada konsep referensi diberi tanda -. Tanda tersebut diberikan kepada masing-masing konsep untuk seluruh kriteria seleksi. Dari penjumlahan nilai konsep (jumlah tanda +,0 dan -), ditentukan nilai bersih konsep. Selanjutnya nilai tersebut digunakan untuk menentukan ranking masing-masing konsep (Batan,2012).
Tabel 2.7 Matrik penyaringan konsep (sketsa)
Sumber: Batan, 2012
Sedangkan penilaian konsep adalah lanjutan dari langkah penyaringan dalam tahapan seleksi konsep. Bentuk matrik dalam penilaian konsep pada setiap kriteria harus diberi bobot yang sesuai dengan besarnya kepentingan masing-masing kriteria. Dari penilaian masing-masing-masimg konsep dengan bobot kriteria yang ditetapkan, dapat dipilih konsep terbaik, yaitu konsep dengan nilai akhir paling tinggi, seperti terlihat pada tabel berikut:
Pada langkah penilaian ini perlu dilakukan pemberian nilai pada konsep dengan nilai 1 sampai dengan 5. Semakin besar nilai, semakin baik konsep produk pada kriteria tertentu. Jika nilai konsep untuk masing-masing kriteriaadalah 3, berarti konsep baru sama dengan konsep referensi pada kriteria tertentu. Nilai 4 berarti konsep baru lebih baik daripada konsep referensi, dan nilai 5 menyatakan, bahwa konsep baru jauh lebih baik dari pada konsep referensi. Sebaliknya, nilai 2 menujukkan konsep baru pada kriteria tertentu lebih jelek daripada konsep referensi, dan nilai 1 menyatakan, bahwa konsep baru jauh lebih jelek daripada konsep referensi (Batan,2012).
BAB 3
METODA PENELITIAN
Dalam penelitian ini, tahapan yang dilakukan dalam pengembangan desain produk sepeda pasien pasca stroke adalah sebagai berikut:
Identifikasi dan perumusan masalah
Rancangan aman?
Ya Tidak
Perancangan detail komponen (Konsep terpilih) Start
Studi literatur
Pembuatan konsep
Pemilihan konsep berdasarkan: Dimensi umum Dimensi lipat Berat Radius belok Keamanan Kenyamanan
Kesimpulan dan saran
Selesai Kajian produk existing
Pembuatan detail gambar teknik
Fungsi terpenuhi?
Ya
Tidak Identifikasi dan penyusunan
daftar kebutuhan
Analisa fungsi
3.1 Identifikasi dan Perumusan Masalah
Permasalahan yang telah diuraikan sebelumnya adalah upaya dalam pengembangan peralatan bantu terapi berupa sepeda roda tiga untuk penderita stroke. Masalah yang dirumuskan dalam penelitian ini adalah bagaimana merancang suatu alat terapi fisik sepeda roda tiga untuk penderita pasca stroke yang ringan, dapat dilipat, memiliki radius belok kecil, sehingga dapat dipindahkan dengan mudah dan dapat digunakan untuk terapi fisik pasien pasca stroke.
3.2 Studi literatur
Studi literatur mencakup mengenai pendalaman pemahaman tentang penyakit stroke serta upaya dalam rehabilitanya dan berbagai konsep yang berhubungan dengan perancangan dan pengembangan produk untuk terapi fisik pasca stroke.
3.3 Kajian Produk Existing
Kajian produk existing dilakukan pada sepeda terapi fisik pasca stroke guna mendapatkan data awal mengenai spesifikasi ukuran, fungsional, keamanan dan kenyamanan, produk existing yang dikembangkan adalah sepeda roda tiga yang dirancang dan dibuat oleh Rodika (2013).
3.4 Identifikasi dan Penyusunan Daftar Kebutuhan
Daftar kebutuhan rancangan didapatakan dari observasi dan wawancara pada 10 responden, observasi dilakukan dengan meminta responden untuk mencoba sepeda rancangan Rodika (2013), kemudian responden diminta untuk memberikan tanggapan mengenai kenyamanan, kemudahan pengoperasian, fungsional serta responden diberi kesempatan untuk menyampaikan keinginan dari desain mengenai pengembangan sepeda terapi roda tiga yang akan datang. Selain itu daftar kebutuhan juga disusun berdasarkan reverensi dari sumber-sumber lain yang relevan.
3.5 Pembuatan Konsep
Berdasarkan daftar kebutuhan maka kemudian dirancang 5 konsep alternatif sepeda roda tiga yang diharapkan mampu memberikan terapi secara maksimal kepada pasien, dan dapat pula digunakan sebagai sarana hiburan dan alat bantu mobilitas bagi penderita.
3.6 Analisa Fungsi
Analisa fungsi bertujuan untuk mengetahui apakah dari konsep yang dibuat dapat berfungsi atau tidak, yaitu secara fungsional (mekanisme gerak sepeda) maupun secara operasional (fungsi gerak sepeda terhadap pengendara).
3.7 Analisa Kekuatan Rangka
Analisa kekuatan rangka bertujuan untuk mengetahui, apakah rangka pada konsep sepeda yang telah dirancang aman untuk digunakan, pembebanan rangka akibat beban pengendara yang di asumsikan sebesar 100 kg, analisa kekuatan rangka dilakukan dengan bantuan software CATIA, rangka dirancang menggunakan material steel, structural ASTM A-36, dengan modulus elastisitas 200 (109 N/m2, Gpa) ultimate tensile strength sebesar 400 (106 N/m2, Mpa) dan
yield strength 250 (106 N/m2, Mpa). Dari hasil simulasi akan didapatkan nilai
tegangan maksimum yang terjadi pada rangka, maka setelah didapat hasil perhitungan tegangan von misesnya selanjutnya dilakukan evaluasi kegagalan material akibat pembebanan. Untuk mengevaluasi hasil rancangan digunakan persamaan 2.3, yaitu:
σt = Tegangan tarik maksimum desain
Sut = Tegangan tarik maksimum material
adalah 3, Perhitungan tegangan maksimum yang terjadi pada rangka depan adalah sebagai berikut:
Untuk dapat melakukan analisa rangka tersebut perlu didefinisikan mengenai distribusi gaya maupun arah gaya beban yang terjadi pada rangka tersebut, pada sisi rangka yang menjadi titik tumpuan diberikan pengikatan, dan pada sisi rangka yang menjadi titik tumpuan diberikan pengikatan.
3.8 Pemilihan Konsep
Dalam pemilihan konsep, kriteria konsep yang digunakan adalah dipilih yaitu berdasarkan: Dimensi umum, dimensi lipat, berat, radius belok, keamanan dan kenyamanan, berikut adalah tabel matrik penilaian untuk pemilihan konsep:
Tabel 3.1 Matrik penilaian konsep
Berdasarkan Dimensi umum
Yaitu dengan membandingkan ukuran utama pada masing-masing konsep, ukuran yang dimaksud adalah panjang dan lebar total dari konsep.
Berdasarkan Dimensi Lipat
Yaitu dengan membandingkan ukuran sepeda pada masing-masing konsep, ukuran yang dimaksud ukuran sepeda setelah dilipatan.
Tabel 3.2 Dimensi konsep awal dan dimensi konsep lipat
Selisih perbandingan dimensi sebelum dan sesudah dilipat digunakan untuk menentukan konsep lipatan paling baik, seperti pada Tabel 3.6 berikut:
Tabel 3.3 Perbandingan dimensi lipat
Berdasarkan Berat
Dari masing-masing konsep akan dianalisa berat rangka tidak termasuk berat roda dan saddle, semua konsep dibuat dari material yang sejenis yaitu St. 37 dengan kekuatan tarik 370 N/mm2- 450 N/mm2, pada masing-masing konsep
akan diberi skor berdasarkan urutan beratnya, nilai 4 untuk konsep dengan berat terkecil dan nilai 1 untuk konsep dengan berat terbesar.
Berdasarkan Radius Belok
memperoleh konsep dengan radius belok terkecil, pada masing-masing konsep akan diberi skor berdasarkan besar radius belok.
Berdasarakan Keamanan
Berdasarkan keamanan yaitu dengan melakukan analisa terhadap kemungkinan cidera badan akibat benturan, proses naik turun sepeda, resiko cidera akibat jatuh dan terhadap analisa kecepatan maksimal yang diijinkan agar sepeda tidak guling saat berbelok maksimal, data tersebut kemudian ditabelkan untuk memperoleh ranking konsep berdasarkan tingkat keamanan.
Tabel 3.4 Kriteria keamanan
Berdasarkan Kenyamanan
Untuk menentukan besarnya nilai keamanan dan kenyamanan tersebut digunakan metede RULA(Rapid Upper Limb Assesment), analisa dilakukan pada kondisi pengendara diam, mengayuh dan berbelok, kemudian data dari masing-masing konsep di tabelkan untuk dibandingkan, seperti pada Tabel 3.8 dan Tabel 3.9 sebagai berikut:
Tabel 3.5 Analisa RULA posisi diam dan mengayuh
Tabel 3.6 Analisa RULA posisi belok
3.9 Perancangan Detail Komponen (Konsep terpilih)
Perancangan komponen bertujuan untuk menentukan dimensi termasuk bentuk detail dari suatu komponen, serta jenis material yang digunakan, pada tahapan ini semua komponen akan dirancang dan digambar sesuai dengan dimensi sesungguhnya, tahapan yang juga mencakup soal penentuan ukuran pipa serta plat yang digunakan pada rangka, untuk simulasi analisa kekuatan material rangka sepeda dilakukan dengan bantuan software CATIA V5.
Pengujian struktur hanya dilakukan pada beban yang dihitung dari berat pengendara dan rangka sepeda secara statis, untuk komponen-komponen standard tidak dilakukan perhitungan ulang, spesifikasi mengikuti spesifikasi produk yang ada dipasaran.
3.10 Pembuatan Detail Gambar Teknik
Pada tahapan ini setelah produk dan komponen produk dirancang dan dianalisa, dari hasil tersebut kemudian digambar menjadi gambar kerja untuk siap dikerjakan, pembuatan detail gambar teknik tidak termasuk simbol dan lambang pengelasan.
3.11 Kesimpulan dan Saran
Pada tahapan ini dari desain sampai hasil jadi produk akan dievaluasi guna memberikan masukan untuk penelitian dan pengembangan produk selanjutnya.
BAB 4
PEMBAHASAN
4.1 Kajian Produk ExistingGambar 4.1 Prototipe sepeda untuk pasien pasca stroke ( Rodika, 2013) Sepeda yang dirancang Rodika (2013) dirancang dengan menempatkan dua roda di sisi depan dan satu roda di sisi belakang, sepeda ini dilengkapi dengan sistem perpindaan gigi rantai guna mengatur posisi saat sepeda ini digunakan di jalan tanjakan atau saat jalan datar, namun hal ini kurang efektif karena penderita pasca stroke lebih cenderung tidak memilih terapi di medan berat atau terapi dengan bersepeda berkecepatan tinggi, atau bahkan penderita tidak mampu untuk melakukan hal tersebut. Sepeda ini mempunyai ukuran utama dengan panjang total 1937mm, lebar total 1010mm, dan tinggi total 905mm, seperti terlihat pada Gambar 4.2, rangka utama produk existing menggunkan profile berbentuk pipa berdiameter 1 inch dengan ketebalan diatas 2 mm, material rangka adalah St. 37, dengan kekuatan tarik maksimumnya 370 N/mm2- 450 N/mm2, sepeda dirancang
dapat dikendarai oleh orang Indonesia dengan tinggi badan 150 cm - 180 cm dan berat maksimum 100 kg.
Gambar 4.2 Dimensi utama sepeda untuk pasien pasca stroke ( Rodika, 2013) Sepeda ini juga dilengkapi dengan sistem kayuh tangan yang memungkinkan bagi penderita pasca stroke menggerakkan sepeda dengan mengayuh dengan tangan atau tidak menggunakan pedal kaki, sistem kayuh ini dirangkai menjadi satu bagian dengan sistem kemudi, diketahui sepeda tersebut memiliki radius belok sebesar 2,9 m dengan titik berat pengendara berada pada jarak 843mm dari permukaan tanah, 830mm dari sumbu roda depan dan 584mm dari sumbu roda belakang, sepeda ini memiliki berat rangka sebesar 30kg dan batas kecepatan maksimum agar tidak guling adalah 14 km/jam, Tabel 4.1 berikut memperlihatkan data spesifikasi dari sepeda roda tiga Rodika (2013).
Tabel 4.1 Spesifikasi sepeda roda tiga Rodika (2013)
4.2 Identifikasi dan Penyusunan Daftar Kebutuhan
Jika dikutip dari majalah kedokteran Indonesia Volume 59 No. 2 januari 2009 menjelaskan bahwa Dalam rehabilitasi medis, istilah fungsi merujuk pada kemampuan/ketrampilan seseorang untuk melakukan aktivitas sehari-hari, aktivitas hiburan atau hobi, pekerjaan, interaksi sosial dan perilaku lain yang dibutuhkan. Jadi dapat dikatakanan terapi fisik pasien pasca stroke tidak ditujukan pada pelatihan otot saja melainkan lebih ke sensomotorik untuk kordinasi gerakan tubuh, karena stroke merupakan ganguan sistem saraf pusat yang mengganggu sistem kerja fungsional pada organ tubuh manusia, disebabkan rusaknya otak dalam mengirim informasi ke saraf anggota tubuh yang digunakan untuk mengontrol otot untuk bergerak.
Untuk mendapatkan daftar kebutuhan rancangan dilakukan observasi dan wawancara pada 10 responden, observasi dilakukan dengan meminta responden untuk mencoba sepeda rancangan Rodika (2013), kemudian responden di minta untuk memberikan tanggapan mengenai kenyamanan, kemudahan pengoperasian, fungsional serta responden diberi kesempatan untuk menyampaikan keinginan dari desain mengenai pengembangan sepeda terapi roda tiga yang akan datang , Pada observasi dan wawancara ini responden dipilih dari orang yang kondisi fisiknya normal, bukan penderita stroke, hal ini bertujuan untuk mendapatkan suatu alat terapi yang mengacu pada kondisi fisik secara normal, sehingga diharapkan pemakai (penderita stroke) perlahan akan terlatih memposisikan badan
sudah ada, selain itu data yang di gunakan sebagai dasar penyusunan daftar kebutuhan juga dikutip dari penelitian yang pernah dilakukan Hariandja, (2013). Yaitu observasi dan wawancara kepada narasumber paramedis dan pasien penderita pasca stroke untuk identifikasi akan kebutuhan sistem rehabilitasi berbasis teknologi terjangkau untuk penderita stroke di Idonesia. Penderita stroke yang terlibat menjadi responden pada penelitian berjumlah 11 orang dan tenaga medis yang terdiri dari 2 orang dokter spesialis rehab medik, 1 orang dokter spesialis saraf, dan 3 orang terapis.
Berdasarkan hasil wawancara menunjukkan bahwa terapi membutuhkan berbagai macam alat bantu sehingga ketersediaan alat bantu yang terbatas dapat menghambat proses terapi. Penderita stroke lebih merasa nyaman melakukan terapi di rumah tetapi ketersediaan biaya, tenaga terapi, dan keterbatasan pendamping latihan membuat proses terapi terhambat. Keterbatasan pendamping yang teridentifikasi adalah keterbatasan waktu dan keterbatasan pengetahuan, Hariandja (2013). Sehingga dari hasil wawancara kemudian dapat disusun daftar kebutuhan dari alat terapi yang merupakan pengembangan alat terapi Rodika (2013), uraian kebutuhan dikelompokkan menjadi 5 kriteria, masing-masing kriteria terdiri dari dua sampai empat tema kebutuhan, yang kemudian akan didefinisikan mengenai penanggung jawab pada masing-masing tema kebutuhan tersebut, dari penyusunan tema kebutuan akan ditentukan apakah tema kebutuhan tersebut menjadi sarat yang harus ada atau berhasil dalam pembuatan rancangan atau menjadi harapan yang sifatnya tidak wajib untuk ada atau berhasil. Dan adapun daftar kebutuhan dari kriteria konsep dapat dilihat pada Tabel 4.2 sebagai berikut:
Tabel 4.2 Daftar kebutuhan produk sepeda tertapi fisik
DAFTAR KEBUTUHAN PRODUK SEPEDA TERAPI FISIK PASIEN PASCA STROKE
S/H Uraian Kebutuhan Penanggungjawab
1. Model roda tiga (fungsi) :
Semua Tim S a. Sepeda dapat dikendarai dengan duduk,
layaknya seperti duduk di kursi biasa. S b. Sepeda memenuhi fungsi terapi ,
yaitu gerakan kaki dan gerakan pada tangan.
H c. Sepeda tetap dalam kondisi seimbang jika pengendara melakukan gerakan .
S d. Sepeda dapat digunakan sebagai sarana transportasi untuk pindah tempat dan mempunyai radius belok dibawah 3 meter.
H e. Bisa dilipat
f. Ukuran kecil seingga masuk di bagasi mobil 2. Kekuatan dan Keamanan
Tim Desain S a. Mampu menahan berat total 100kg.
S b. Aman digunakan H c. Tidak mudah rusak
3. Ergonomis
Tim Desain H a. Mudah dan Nyaman dikendarai
H b. Resiko cidera kecil bagi pengguna H c. Mudah di parkir di segala tempat
4.Manufaktur dan Perakitan Tim
Manufaktur S a. Bisa dibuat
S b. Bisa dirakit 5. Maintenance
Semua Tim H a. Mudah di rawat dan di bersihkan
H b. Mudah untuk direparasi H c. sparepart mudah didapat Keterangan:
S : Sarat H: Harapan
Daftar kebutuhan produk sepeda terapi fisik pasien pasca stroke dijadikan acuan dalam pengembangan rancangan konsep sepeda yang telah dirancang oleh
4.3 Pembuatan Konsep
Dari daftar kebutuhan maka dibuatlah konsep alternatif sepeda roda tiga yang diharapkan mampu memberikan terapi secara maksimal kepada pasien, dan dapat pula digunakan sebagai sarana hiburan dan alat bantu mobilitas bagi penderita, adapun konsep alternatif adalah sebagai berikut:
4.3.1 Alternatif Konsep 1
Pada alternatif konsep 1 seperti terlihat pada Gambar 4.3 sepeda terapi dirancang dengan model tempat duduk seperti layaknya duduk di kursi, jadi pemakai akan merasa lebih nyaman saat mengendarai sepeda tersebut, sepeda ini dirancang dengan dua roda di depan dan satu roda di belakang, dua roda di depan digunakan sebagai roda kemudi dan satu roda di belakang digunakan sebagai roda penggerak.
Gambar 4.3 Konsep 1
Desain dua roda di depan dan satu roda di belakang dipilih karena desain seperti ini dinilai lebih setabil saat dikendarai terutama, pada alternatif konsep satu ini sistem kemudi berada di bawah tempat duduk, dirancang dengan sistem saat pengendara menyondongkan atau memiringkan badanya ke sisi kiri maka roda akan berbelok ke arah kiri, begitu juga sebaliknya saat pengendara menyondongkan badanya ke sisi kanan maka roda akan berbelok ke arah kanan, sepeda ini digerakkan dengan mengayunkan kaki layaknya orang berjalan, hal ini akan memudahkan penderita stroke untuk berlatih karena model gerakan hampir menyerupai orang yang sedang berjalan, jika salah satu kaki mengalami gangguan
akibat serangan stroke maka gerakan mengayun bisa dibantu dengan tangan, karena pada model ini tangan berperan sebagai penggerak pada tuas yang ditarik ataupun didorong yang terhubung dengan tuas ayun pada kaki, alternatif konsep satu ini juga dirancang untuk bisa dilipat, sebagaimana konsep lipatan diperlihatkan seperti pada skema gambar berikut:
Gambar 4.4 Skema konsep lipatan konsep 1
Dari ukuran utama sebelum dilipat, konsep satu memiliki ukuran dengan panjang total 1132 mm, lebar total 1066 mm dan tinggi total 938 mm, kemudian setelah dilipat sepeda ini mempunyai ukuran lipatan untuk panjang menjadi 975 mm , lebar 725 mm dan tinggi 1160 mm.
4.3.2 Alternatif Konsep 2
Gambar 4.5 Konsep 2
Seperti pada konsep satu, konsep yang kedua ini juga menggunakan tiga roda, yaitu satu roda di belakang sebagai penggerak dan dua roda di depan sebagi roda kemudi, sepeda ini mempunyai konsep yang sederhana, penderita pasca stroke akan merasa lebih nyaman melakukan terapi, karena selain melakukan terapi penderita pasca stroke juga bisa memanfaatkan alat terapi untuk keperluan mobilitas, apakah itu jalan-jalan atau hanya sekedar berkeliling di halaman rumah, untuk memudahkan dalam operasional model sistem penggerak didesain seperti sepeda pada umumnya, yaitu dengan di kayuh, dan untuk sistem kemudi sepenuhnya dikendalikan oleh tangan, dengan menarik atau mendorong tuas kemudi sepeda akan berbelok sesuai keinginan, pengendalian sepeda apakah menggerakkan atau membelokkan akan secara otomatis melatih kembali sistem sensomotorik kordinasi gerakan organ badan yang sempat terganggu akibat serangan stroke, hal ini jika dilakukan secara benar diharapkan akan dapat mengembalikan fungsi kerja anggota tubuh seperti semula, atau paling tidak bisa mendekati normal sehingga penderita pasca serangan stroke bisa hidup mandiri tidak menggantungkan hidupnya pada orang lain dan seperti yang di perlihatkan pada Gambar 4.6 sepeda alternatif konsep ke dua ini juga dirancang untuk bisa dilipat untuk memudahkkan saat penyimpanan atau pengangkutan, konsep lipatan ditunjukkan pada skema gambar berikut: