i
DETEKSI BENDA BERDASARKAN BENTUK
DAN DIMENSI PADA MESIN PEMISAH
BARANG
TUGAS AKHIR
Oleh :
RIWAN DONY SITORUS
NIM : 4211401020
PROGRAM STUDI TEKNIK MEKATRONIKA
JURUSAN TEKNIK ELEKTRO
POLITEKNIK NEGERI BATAM
2018
DETEKSI BENDA BERDASARKAN BENTUK DAN
DIMENSI PADA MESIN PEMISAH BARANG
TUGAS AKHIR
Oleh :
RIWAN DONY SITORUS
4211401020
Disusun untuk memenuhi salah satu syarat kelulusan Program Diploma IV Program Studi Teknik Mekatronika
Politeknik Negeri Batam
PROGRAM STUDI TEKNIK MEKATRONIKA
POLITEKNIK NEGERI BATAM
i
PERNYATAAN KEASLIAN TUGAS AKHIR
Saya yang bertandatangan dibawah ini menyatakan bahwa isi sebagian maupun keseluruhan Tugas Akhir saya yang berjudul : “Deteksi Benda Berdasarkan Bentuk dan Dimensi pada Mesin Pemisah Barang” adalah hasil karya sendiri, diselesaikan
tanpa menggunakan bahan-bahan yang tidak diijinkan dan bukan merupakan karya pihak lain yang saya akui sebagai karya sendiri.
Semua referensi yang dikutip atau dirujuk telah ditulis secara lengkap pada daftar pustaka.Apabila ternyata pernyataan saya ini tidak benar, saya bersedia menerima sanksi sesuai peraturan yang berlaku.
Batam, 17 Juli 2018
Riwan Dony Sitorus NIM.4211401020
ii
LEMBAR PENGESAHAN TUGAS AKHIR
Tugas Akhir disusun untuk memenuhi salah satu syarat memperoleh gelar Sarjana Terapan Teknik (S.Tr.T)
di
Politeknik Negeri Batam Oleh
Riwan Dony Sitorus NIM. 4211401020
Tanggal Sidang : 4 Juni 2018
Disetujui oleh :
Dosen Penguji : Dosen Pembimbing :
1. Hendawan Soebhakti, S.T., M.T. NIK. 104031
1. Dr. Budi Sugandi, S.T, M.Eng NIK. 100002
2. Rizky Hudhajanto S.ST.,M.T. NIK. 117177
iii
DETEKSI BENDA BERDASARKAN BENTUK DAN DIMENSI PADA MESIN PEMISAH BARANG
Nama mahasiswa : Riwan Dony Sitorus NIM : 4211401020
Pembimbing : Dr. Budi Sugandi, S.T, M.Eng Email : [email protected]
ABSTRAK
Perkembangan Teknologi tidak terlepas dari kehidupan manusia saat ini dan telah menjadi kebutuhan saat kita melakukan aktivitas sehari-hari. Peningkatan akan kebutuhan teknologi dapat kita lihat dengan inovasi dan teknologi pada komputer sesuai perkembangan zaman. Salah satu penerapan teknologi komputer ialah pengolahan citra atau image processing. Penggunaan pengolahan citra yang beragam dapat meningkatkan kualitas, pelacakan, dan mengidentifikasi sebuah benda. Selain itu, masih banyak metode yang digunakan sesuai kebutuhan untuk menyelesaikan suatu masalah. Dalam hal ini penulis merealisasikan penggunaan image processing untuk diterapkan pada deteksi objek sesuai bentuk dan dimensi. Hasil dari capture kamera webcam sebagai deteksi objek serta menggunakan mesin pemisah sebagai pemindah maka objek yang akan dideteksi. Adapun klasifikasi objek yang dideteksi oleh kamera webcam yaitu objek berdasarkan bentuk dasarnya bentuk lingkaran, bentuk persegi, dan bentuk segitiga sama sisi dengan meggunakan metode Shape Matching. Pada dimensi benda, pembacaan dimulai dari objek terkecil, sedang, dan besar sesuai dengan range size object dalam pixel yang telah didapatkan. Sehingga untuk pengujian dalam konversi pixel ke milimeter didapatkan persentase error sebesar 0,9%.
iv
OBJECT DETECTION ON SORTING MACHINE BASED ON SHAPE AND DIMENSION
Student Name : Riwan Dony Sitorus NIM : 4211401020
Supervisor : Dr. Budi Sugandi, S.T, M.Eng Email : [email protected]
ABSTRACT
Technological development is inseparable from the human life today and has become a necessity as we perform daily activities. The increase will need technology we can see with the innovation and technology in computer matches the times. One application of the technology of a computer is processing the image or image processing. The use of a variety of image processing can improve the quality, tracking, and identifying an object. In addition, there are still many methods are used as needed to solve a problem. In this case the author realize the use of image processing for object detection applied in appropriate forms and dimensions. The result of the camera capture webcam as object detection and use the sorting machine as the mover then the object will be detected. As for the classification of objects detected by the camera webcam that is essentially based on the shape of the object form of circle, square form, and the form of equilateral triangle with a Shape Matching method with. On dimension objects, reading starting from the smallest objects, medium, and large size range corresponds to object in pixels that have been obtained. So for testing in the conversion pixel to the millimetre was obtained by a percentage error of 0.9%.
v
KATA PENGANTAR
Puji dan syukur penulis ucapkan kepada Tuhan Yang Maha Esa, atas berkat, kasih dan anugerahNya sehingga penulis dapat menyelesaikan Tugas Akhir yang berjudul “Deteksi Benda berdasarkan Bentuk dan Dimensi pada Pemisah Barang”. Tugas Akhir ini merupakan salah satu persyaratan akademis untuk menyelesaikan studi Diploma IV Teknik Mekatronika di Politeknik Negeri Batam.
Penulis sangat menyadari bahwa apa yang penulis lakukan dalam penyusunan buku Tugas Akhir ini masih jauh dari kata sempurna. Maka dari itu, penulis akan menerima kritik dan saran yang berguna dan membangun dalam menyempurnakan sistem ini dimasa yang akan datang, semoga apa yang telah penulis lakukan ini dapat bermanfaat bagi pembaca. Dalam perencanaan dan pembuatan hingga selesainya tugas akhir ini. Penulis tidak terlepas dari bantuan-bantuan pihak yang sangat membantu. Untuk itu penulis mengucapkan terima kasih yang sebesar-besarnya kepada:
1. Tuhan Yesus Kristus atas segala limpahan berkat dan karunia-Nya.
2. Ayah, Ibu dan keluarga tercinta yang memberikan dukungan materil, doa, dan motivasi.
3. Bapak Dr. Priyono Eko Sanyoto selaku Direktur Politeknik Negeri Batam.
4. Bapak Dr. Budi Sugandi, S.T, M.Eng selaku Kepala Jurusan Teknik Elektro yang selalu memberikan yang terbaik untuk kami serta selaku Dosen Pembimbing Tugas Akhir yang selalu sabar dan setia membimbing, menemani dan memberi masukan-masukan bagi penulis disetiap kesempatan.
5. Bapak Heru Wijanarko, S.T., M.Sc. selaku Kepala Program Studi Teknik Mekatronika.
dan selaku Dosen wali penulis.
6. Tim Tugas Akhir, Dwi Ayu dan Aprianto yang selalu memberikan semangat dan motivasi untuk kelulusan bersama serta teman-teman seperjuangan tugas akhir yang berada diruangan TF 2.1 yaitu Rohmiyati, Meirani, Krishna, Muis, Septian
7. Teman-teman seperjuangan D4 Teknik Mekatronika angkatan 2014 Konsentrasi Teknik Otomasi tetap semangat dan salam kompak selalu.
Penulis menyadari bahwa yang penulis lakukan dalam penyusunan laporan Tugas Akhir ini masih jauh dari sempurna. Oleh karena itu kritik dan saran yang membangun
vi penulis harapkan dalam penyempurnaan penyelesaian laporan tugas akhir ini di masa yang akan datang. Semoga tulisan ini dapat bermanfaat bagi pembaca pada umumnya dan penulis pada khususnya.
Batam, 17 Juli 2018 Penulis
vii
DAFTAR ISI
PERNYATAAN KEASLIAN TUGAS AKHIR ... i
LEMBAR PENGESAHAN TUGAS AKHIR ... ii
ABSTRAK ... iii
ABSTRACT ... iv
KATA PENGANTAR ... v
DAFTAR ISI ... vii
DAFTAR GAMBAR ... ix
DAFTAR TABEL ... xi
BAB I ... 1
PENDAHULUAN ... 1
1.1 Latar Belakang Masalah ... 1
1.2 Perumusan Masalah ... 2
1.3 Batasan Masalah... 2
1.4 Tujuan dan Manfaat ... 2
1.5 Sistematika Penulisan ... 3
BAB II ... 4
DASAR TEORI ... 4
2.1 LabVIEW ... 4
2.1.1 Kontrol Port Serial di LabVIEW ... 5
2.2 Image Proccesing pada LabVIEW ... 5
2.2.1 Image Thresholding ... 6
2.2.2 Morfologi... 7
2.2.3 Citra RGB ke Citra keabuan ... 8
2.3 Motor Servo SG90 ... 8
viii
2.5 Kamera Webcam ... 9
BAB III ... 10
PERANCANGAN SISTEM ... 10
3.1 Rancangan Penelitian ... 10
3.2 Perancangan Mekanik (Hardware) dan Elektrikal ... 11
3.3 Perancangan Sistem ... 12
3.4 Instrumen Penelitian... 15
BAB IV ... 16
HASIL DAN ANALISA ... 16
4.1 Metode Pengambilan Data ... 16
4.2 Pengujian Hasil Deteksi Bentuk dan Dimensi ... 16
4.3 Pengujian Hasil Deteksi Bentuk dan Dimensi kondisi NG ... 33
4.4 Mengubah nilai Piksel ke milimeter (mm) ... 36
4.5 Analisa ... 39
BAB V ... 40
KESIMPULAN DAN SARAN ... 40
5.1 Kesimpulan ... 40
5.2 Saran ... 40
DAFTAR PUSTAKA ... 41
ix
DAFTAR GAMBAR
Gambar 2.1 Tampilan Front Panel dan Block Diagram pada LabVIEW ... 4
Gambar 2.2 Tampilan NI Vision Assistant ... 6
Gambar 2.3 Contoh penggunan Image Threshoulding menggunakan Vision Assistant... 7
Gambar 2.4 Contoh penggunaan Morphology menggunakan Vision Assistant ... 8
Gambar 2.5 Motor Servo ... 8
Gambar 2.6 Arduino Mega2560 ... 9
Gambar 2.7 Webcam Logitech C270. ... 9
Gambar 3.1 Diagram Blok tahapan penelitian ... 10
Gambar 3.2 Block Diagram Hardware ... 11
Gambar 3.3 Wiring Diagram Perancangan Sistem ... 11
Gambar 3.4 Conveyor ... 12
Gambar 3.5 Blok Diagram Sistem ... 11
Gambar 3.6 Flowchart Mesin ... 13
Gambar 3.7 Flowchart Software ... 13
Gambar 4.1 Hasil Tampilan Deteksi Lingkaran dengan Dimensi Kecil ... 16
Gambar 4.2 Hasil Tampilan Deteksi Lingkaran dengan Dimensi Sedang. ... 18
Gambar 4.3 Hasil Tampilan Deteksi Lingkaran dengan Dimensi Besar. ... 19
Gambar 4.4 Hasil Tampilan Deteksi Persegi dengan Dimensi Kecil ... 21
Gambar 4.5 Hasil Tampilan Deteksi Persegi dengan Dimensi Kecil dirotasi ... 22
Gambar 4.6 Hasil Tampilan Deteksi Persegi dengan Dimensi Sedang ... 24
Gambar 4.7 Hasil Tampilan Deteksi Persegi dengan Dimensi Sedang Dirotasi ... 24
Gambar 4.8 Hasil Tampilan Deteksi Persegi dengan Dimensi Besar Dirotasi ... 26
Gambar 4.9 Hasil Tampilan Deteksi Segitiga dengan Dimensi Kecil ... 27
Gambar 4.10 Hasil Tampilan Deteksi Segitiga dengan Dimensi Kecil Dirotasi... 28
Gambar 4.11 Hasil Tampilan Deteksi Segitiga dengan Dimensi Sedang ... 29
Gambar 4.12 Hasil Tampilan Deteksi Segitiga dengan Dimensi Sedang Dirotasi ... 29
Gambar 4.13 Hasil Tampilan Deteksi Segitiga dengan Dimensi Besar ... 31
Gambar 4.14 Hasil Tampilan Deteksi Segitiga dengan Dimensi Besar ... 31
Gambar 4.15 Hasil Tampilan Deteksi Lingkaran dengan Dimensi Kecil ... 33
Gambar 4.16 Hasil Tampilan Deteksi Lingkaran dengan Dimensi Kecil Kategori NG ... 35
Gambar 4.17 Hasil Tampilan Deteksi Lingkaran dengan Dimensi Kecil Kategori NG ... 35
x Gambar 4.19 Data object size bentuk Persegi dimensi Sedang ... 36 Gambar 4.20 Pengukuran Jangkauan Kamera menggunakan alat ukur ... 36
xi
DAFTAR TABEL
Tabel 4.1 Hasil Tampilan Lingkaran dengan range object size Dimensi Kecil ... 17
Tabel 4.2 Hasil Tampilan Lingkaran dengan range size object Dimensi Sedang ... 18
Tabel 4.3 Hasil Tampilan Lingkaran dengan range size object Dimensi Besar... 20
Tabel 4.4 Hasil Tampilan Persegi dengan range size object Dimensi Kecil ... 21
Tabel 4.5 Hasil Tampilan Persegi dengan range size object Dimensi Kecil ... 23
Tabel 4.6 Hasil Tampilan Persegi Sedang dengan range size object Dimensi dan Dirotasi25 Tabel 4.7 Hasil Tampilan Persegi Besar dengan range size object Dimensi dan Dirotasi . 26 Tabel 4.8 Hasil Tampilan Segitiga Kecil dengan range size object Dimensi dan Dirotasi . 28 Tabel 4.9 Hasil Tampilan Segitiga Sedang dengan range size object Dimensi ... 30
Tabel 4.10 Hasil Tampilan Segitiga Besar dengan range size object Dimensi ... 32
Tabel 4.11 Hasil Tampilan Bentuk Lingkaran dengan range size object Dimensi Kecil ... 33
1
BAB I
PENDAHULUAN
1.1 Latar Belakang Masalah
Penggunaan teknologi komputer semakin pesat mengikuti perkembangan zaman. Salah satu teknologi komputerisasi tersebut adalah Pengolahan Citra. Pengolahan citra atau Image Processing sekarang memiliki aplikasi yang sangat luas dalam membuat kemudahan pekerjaan diberbagai bidang kehidupan antara lain di bidang biologi, biomedis kedokteran, astronomi, arkeologi, sistem keamanan, militer, desain visual, industri hingga penginderaan jarak jauh yang menggunakan teknologi pengolahan citra. Pengolahan citra mampu melakukan proses identifikasi terutama untuk mengidentifikasi berupa foto, video dan bentuk visual lainnya. Proses ini tentunya mempunyai data citra yang telah kita masukkan dan hasil akhirnya yang berbentuk citra yang lebih baik. Mengolah informasi yang telah didapat dari keadaan nyata (visualisasi) berupa pengolahan citra agar didapatkan model benda untuk mendapatkan suatu pemodelan yang mendekati bentuk asli suatu benda, yang kemudian diidentifikasi sesuai kebutuhan. Teknologi dari image processing tersebut dapat bekerja mendekati proses kerja otak manusia seperti pengontrolan dalam mengidentifikasi suatu objek.
Dari penelitian yang pernah dilakukan berupa program aplikasi yang kemudian dikembangkan untuk mendeteksi objek-objek sederhana secara terkomputerisasi. Objek-objek yang dapat sederhana dan dikenali bentuk dasarnya yaitu bentuk lingkaran, bentuk persegi dan bentuk segitiga. Adapun data yang didapatkan dan ditampilkan pada program dari hasil pendeteksian objek adalah bentuk objek beserta dimensi yang membangun objek tersebut [1]. Program aplikasi tersebut hanya mampu mendekteksi objek dalam bentuk sederhana serta metode yang digunakan adalah sistem pengenalan pola secara statistik. Benda tersebut hanya berupa foto yang diambil oleh kamera kemudian diolah menggunakan aplikasi MathLab dan memisahkan objek berdasarkan bentuk serta dimensi benda yang terdeteksi.
Berdasarkan dari deteksi benda yang telah dibuat pada program aplikasi, maka penelitian pengembangan selanjutnya akan dilakukan pada pengaplikasiannya pada mesin pemisah barang atau sering dikenal sebagai conveyor dan benda yang akan dideteksi adalah objek dengan bentuk dasarnya adalah bentuk lingkaran, segitiga dan persegi. Penerapan metode yang akan digunakan selanjutnya untuk penelitian ini menggunakan software LabVIEW yang telah ditambahkan fitur khusus untuk image processing yaitu Vision Assistant untuk mendeteksi bentuk suatu benda tersebut adalah menggunakan metode Shape Matching dan
2 pada dimensi suatu benda, menggunakan range size object dengan satuan piksel pada benda yang akan dideteksi. Karena benda yang akan di capture oleh Webcam tentu peran cahaya sangat penting supaya terdeteksi dengan baik dalam proses pemisah barang berdasarkan bentuk dan dimensi benda. Penerapan deteksi benda berdasarkan bentuk dan dimensi diaplikasikan pada mesin pemisah barang atau conveyor sebagai pemindah barang yang akan dideteksi kemudian benda tersebut dipisah oleh pemilah sekat sesuai yang telah ditentukan. Selanjutnya dapat dipantau secara langsung benda yang akan dideteksi oleh kamera dan terhubung pada komputer.
1.2 Perumusan Masalah
Permasalahan dalam penelitian ini dapat dirumuskan sebagai berikut :
1. Bagaimana cara mendesain mesin pemisah barang yang memiliki output 9 pendorong benda?
2. Bagaimana cara merancang dan membuat deteksi benda berdasarkan bentuk serta dimensi pada mesin pemisah barang?
3. Bagaimana mengolah data dari kamera untuk mengontrol mesin pemisah barang? 4. Bagaimana cara memisahkan benda sesuai dengan bentuk dan dimensi nya?
1.3 Batasan Masalah
Pada penelitian ini permasalahan yang dibatasi beberapa hal sebagai berikut:
1. Mesin pemisah barang didesain untuk mendeteksi dan membandingkan benda yang berbentuk dasarnya berupa lingkaran, persegi dan segitiga.
2. Mesin pemisah barang didesain untuk membandingkan dimensi umum yaitu kecil, sedang, dan besar.
3. Mendeteksi suatu bentuk citra benda berdasarkan hasil dari kamera webcam.
4. Untuk objek benda yang akan dideteksi dengan dimensi yang telah ditetapkan, yaitu 3 cm kategori kecil, 5 cm kategori dimensi sedang, dan 7 cm kategori dimensi besar serta masing masing ketebalan benda 8 mm dengan material objek dari akrilik.
5. Menggunakan kamera webcam untuk deteksi objek. 6. Tidak membahas kecepatan motor.
1.4 Tujuan dan Manfaat
Adapun tujuan dari pembuatan Tugas Akhir ini. Tujuan yang diperoleh dalam pembuatan tugas akhir ini antara lain yaitu :
3 1. Merancang suatu sistem mesin pemisah barang berdasarkan bentuk dan dimensi suatu
benda.
2. Menerapkan metode Shape Matching, pada pengolahan citra untuk mengetahui bentuk serta range size object dengan satuan pixel untuk dimensi objek benda.
Serta adapun manfaat dari pembuatan Tugas Akhir ini. Manfaat yang diperoleh dalam pembuatan tugas akhir ini antara lain yaitu :
1. Memberikan kemudahan dalam memisahkan benda berdasarkan bentuk dan dimensi dalam mensortir benda dengan klasifikasi tertentu.
2. Sebagai pengaplikasian pengetahuan pembelajaran dasar pengolahan citra.
1.5 Sistematika Penulisan
Untuk memahami lebih jelas laporan Tugas Akhir, maka dilakukan dengan cara mengelompokkan materi menjadi beberapa bab dan sub bab dengan sistematika penulisan sebagai berikut :
BAB I : PENDAHULUAN
Menjelaskan tentang latar belakang, perumusan masalah, batasan masalah, tujuan dan manfaat, serta sistematika penulisan.
BAB II: DASAR TEORI
Menjelaskan secara umum tentang metode pengolahan citra yang digunakan dalam mesin pemisah barang dan komponen yang akan digunakan deteksi benda berdasarkan bentuk dan dimensi pada mesin pemisah barang
BAB III: PERANCANGAN SISTEM
Membahas tentang perancangan sistem, rancangan mekanik, perancangan software dan membahas instrumen penelitian yang digunakan pada deteksi benda berdasarkan bentuk dan dimensi pada mesin pemisah barang.
BAB IV: HASIL DAN ANALISA
Membahas tentang hasil Citra, Pengujian Deteksi Benda sesuai Bentuk dan Dimensi disertai dengan Analisa dari hasil pengukuran dan pengujian tersebut.
BAB V : KESIMPULAN DAN SARAN
Membahas tentang kesimpulan yang diperoleh dari analisis dan berisi saran untuk penelitian yang sudah dikerjakan, seperti apa yang harus dilakukan untuk penilitian selanjutnya.
4
BAB II
DASAR TEORI
2.1 LabVIEW
LabVIEW yang mulai populer digunakan pada bidang instrumentasi. Kepanjangan dari LabVIEW ialah Laboratory Virtual Instrument Engineering Workbench bukan bahasa pemrograman dasar yang populer dipelajari serta banyak digunakan dikalangan programmer seperti bahasa C++, C#, Basic. Bahasa pemrograman pada LabVIEW bukan menggunakan kode sebagai aplikasinya yang perlu memperhatikan syntax (koma, titik koma, tanda kurung kotak, tanda kurung kurawal, tanda kurung lengkung). Pada dasarnya LabVIEW akan menampilkan Graphical User Interface (GUI) untuk memudahkan user. LabVIEW memiliki dua buah windows yaitu front panel dan block diagram.
Gambar 2.1 Tampilan Front Panel dan Block Diagram pada LabVIEW
Pada gambar 2.1 windows Front panel sebelah kiri menyediakan interface untuk pengguna yang akan mensimulasikan panel untuk instrument,input pada front panel disebut sebagai kontrol dan output terdiri dari Display seperti menampilkan grafik, volume, dsb. Sedangkan pada windows block diagram sebelah kanan merupakan tampilan yang digunakan untuk membuat program yang telah dirancang algoritmanya. Program yang ada pada block diagram merupakan program berbasis gambar sehingga kita tinggal memilih berdasarkan kebutuhan dan fungsi yang akan kita gunakan. Program yang ada pada block diagram merupakan kumpulan dari beberapa fungsi yang dihubungkan dengan line berdasarkan tipe
5 data yang dibutuhkan sehingga membentuk suatu program terstruktur kemudian dapat ditampilkan pada front panel [2].
2.1.1 Kontrol Port Serial di LabVIEW
Pada penelitian ini tentu perlu peran microcontroller seperti penggunaan Arduino sebagai pusat yang mengendalikan input, proses dan output sebuah rangkaian. LabVIEW supaya dapat berkomunikasi dengan microcontroller Arduino membutuhkan konfigurasi tambahan yaitu NI VISA (Virtual Instrument Software Architecture) menyediakan antar muka pemrograman antara LabVIEW dengan Arduino. NI VISA mampu mengkonfigurasi, troubleshooting sistem komunikasi serial, Ethernet dan USB interface.
Adapun fungsi dari masing-masing NI VISA yang digunakan ini adalah sebagai berikut [2]:
• VISA configure serial port,
Berfungsi mengatur adanya komunikasi serial di awal sebelum komunikasi dilangsungkan, termasuk yang digunakan (VISA resource name), serta kecepatan komunikasi (baud rate).
• VISA write,
Berfungsi untuk menulis atau mengirimkan data dari hardware interface yang ditentukan oleh VISA resource name.
• VISA read,
Berfungsi untuk membaca sejumlah byte data dari alat atau hardware interface yang ditentukan oleh VISA resource name.
• VISA close,
Berfungsi untuk mengakhiri dari proses komunikasi dengan alat yang ditentukan oleh VISA resource name.
2.2 Image Proccesing pada LabVIEW
Pengolahan citra atau image processing merupakan proses untuk memperbaiki kualitas citra, khususnya menggunakan komputer, menjadi citra yang kualitasnya lebih baik agar lebih mudah untuk dipahami oleh manusia sebagai user. Proses ini mempunyai ciri data masukan
6 dan informasi berupa keluaran yang tentunya berbentuk citra. Image Processing dapat dilakukan pada software pada LabVIEW dan fitur tambahan khusus yaitu Vision Assistant.
Vision Assistant merupakan fitur tambahan dari LabVIEW khusus untuk mengolah citra. Vision Assistant ini adalah Express VI yang memiliki kelebihan dimana Script yang digunakan di Vision Assistant. Fitur dari script ini mencatat setiap langkah dari pemprosesan algoritma. Algoritma dicatat dalam file script, yang berisi fungsi-fungsi pemprosesan dan parameter untuk algoritma image processing yang ada pada Vision Assistant.
Gambar 2.2 Tampilan NI Vision Assistant
2.2.1 Image Thresholding
Image Thresholding atau Pengambangan merupakan proses yang digunakan untuk mengambil suatu nilai dari citra awal pada hasil kamera. Menganalisis citra dengan memisahkan antara objek dengan background dalam suatu citra berdasarkan pada perbedaan tingkat kecerahannya atau gelap terang nya pada hasil capture dari kamera. Citra yang telah dilakukan proses threshoulding g(x,y) dapat didefinisikan pada persamaan 2.1 sebagai berikut [6] :
𝑔(𝑥, 𝑦) = {1, 𝐽𝑖𝑘𝑎 𝑓(𝑥, 𝑦) ≥ 𝑇
0, 𝐽𝑖𝑘𝑎 𝑓(𝑥, 𝑦) < 𝑇 (2.1)
Ket :
T = Threshould
f(x,y) ≥ T disebut Object Point
Citra dari objek yang telah didefinisikan sebagai piksel dimana suatu objek ditandai dengan nilai 1 sementara piksel-piksel ditandai dengan nilai 0 [3]. Untuk
7 mencoba menggunakan proses Thresholding kita perlu membuat aplikasi ataupun program untuk mengubah-ubah nilai thresholding. Pada Vision Assistant memiliki proses Color Image Thresholding dapat dilihat pada Gambar 2.3 dibawah ini. Dapat dilihat dua citra yaitu citra asli dengan objek warna merah dari kamera dan citra dengan hasil thresholding yang telah ditentukan ataupun diatur untuk membedakan warna objek terdeteksi dengan background berwarna biru yang dimana warna biru ini dapat kita ganti sesuai dengan keinginan dan berfungsi membedakan warna yang telah di lakukan proses image thresholding [9]. Proses dari thresholding menghasilkan citra biner agar mudah diolah ke proses selanjutnya.
Gambar 2.3 Contoh proses Image Threshoulding menggunakan N Vision Assistant
2.2.2 Morfologi
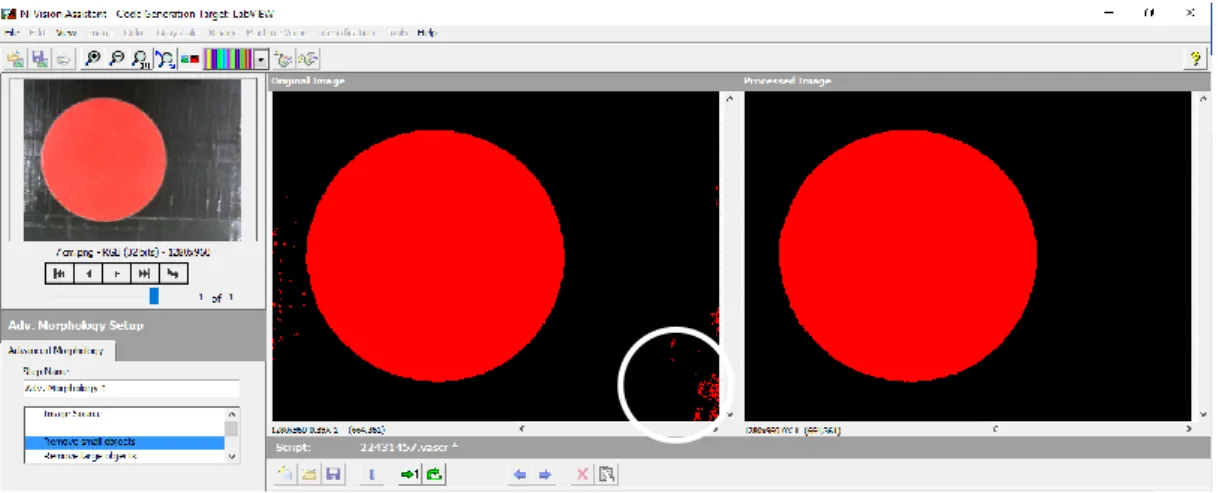
Setelah melakukan proses thresholding yang menghasilkan citra biner serta memiliki area yang dianggap sebagai noise. Untuk lebih memaksimalkan citra biner, proses morfologi merupakan solusinya. Morfologi pada proses image proccessing dengan menggunakan nilai setiap pikselnya yang diperoleh dari proses perbandingan dengan piksel sekitarnya [8]. Tujuannya pengguanaan morfologi ialah untuk memperoleh data informasi mengenai bentuk dari suatu citra dengan mengatur bentuk citra tersebut [7].
Penggunaan proses Morfologi dapat kita gunakan dengan menggunakan Vision Assistant dapat dilihat pada gambar 2.4. Adanya noise dari proses threshould dapat kita lihat pada gambar citra sebelah kiri yang ditandai dengan lingkaran warna putih dan sebelah kanan merupakan proses setelah dillakukan proses morfologi.
8 Gambar 2.4 Contoh proses Morphology menggunakan Vision Assistant
2.2.3 Citra RGB ke Citra keabuan
Setiap citra memiliki ruang warna oleh karena itu citra yang berwarna yang telah dihasilkan oleh capture kamera. Parameter warna RGB memiliki 32 bit yang nilainya antara 0-255. Sedangkan Citra keabuan (grayscale) perubahan dari citra yang memiliki ruang warna yang kemudian adanya intesitas range antara 0-255 saja.
Perhitungan untuk konversi dari citra RGB menjadi citra keabuan dapat dilihat dari persaamaan berikut [4] :
Grayscale = 0.2989.R + 0,5870.G + 0.1141.B (2.2)
2.3 Motor Servo SG90
Motor Servo yang memiliki 3 kabel, kabel merah untuk VCC , kabel coklat untuk GND serta kabel oren sebagai output pwm ke arduino. Motor Servo merupakan motor DC yang memiliki serangkaian gear,dan rangkaian kontrol serta sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor.
9
2.4 Arduino Mega 2560
Arduino merupakan otak dari proses pengedalian suatu rangkaian. Arduino Mega2560 memiliki 54 pin digital input/output. Adapun data teknis dari board Arduino Mega2560 adalah sebagai berikut [5] :
• Digital I/O Pins : 54 pin digital ,(15 untuk PWM output)
• Analog Input Pins : 16
• DC Current per I/O Pins : 40 mA
• DC Current for 3.3V : 50 mA
• Flash Memory : 256 KB of which 8 KB used by bootleader
• SRAM : 8 KB
• EEPROM : 4 KB
• Clock Speed : 16 MHz
Gambar 2.6 Arduino Mega2560
2.5 Kamera Webcam
Sebuah webcam yang digunakan ialah camera webcam C270 yang terlihat pada Gambar 2.6 terhubung dengan komputer dengan media kabel USB atau parallel port untuk lebih lengkapnya spesifikasi dari webcam logitech C270 dapat dilihat pada Lampiran A. Agar webcam dapat digunakan oleh komputer, dibutuhkan suatu perangkat lunak. Perangkat lunak itu akan menangkap tiap frame pada waktu tertentu, biasanya disebut dengan frame rate. File yang disimpan biasanya berformat .avi (video), tapi dapat diubah dalam bentuk jpeg (image) atau yang lainnya agar tidak terlalu banyak memakan tempat pada media penyimpanan [3].
.
10
BAB III
PERANCANGAN SISTEM
Pada bab ini yang akan dilakukan ada beberapa tahapan untuk perancangan deteksi benda berdasarkan bentuk dan dimesi pada mesin pemisah barang.
3.1 Rancangan Penelitian
Rancangan atau tahapan penelitian yang akan dilakukan dalam perancangan sistem pada Deteksi Benda Bedasarkan Warna dan Dimensi pada Mesin Pemisah Barang adalah perancangan terdiri dari beberapa bagian, diantaranya perancangan Hardware dan perancangan Software. Agar lebih jelasnya diuraikan dalam bentuk blok diagram .
Gambar 3.1 Blok Diagram tahapan penelitian
Penelitian akan dimulai dengan studi literatur sesuai dengan alat yang akan dibuat. Studi literatur yang dilakukan mencari wawasan dan referensi tentang dasar teori komponen, pemograman yang digunakan untuk mesin pemisah barang. Dilanjutkan dengan perancangan mekanik (hardware). Pada bagian ini akan dilakukan pembuatan hardware. Dalam pembuatan hardware ini, akan dilakukan pembuatan conveyor dengan spesifikasi ukuran panjang 130 cm, lebar 12 cm dan memiliki tinggi 14 cm dimana conveyor ini sebagai dasar sekaligus tempat peletakan komponen-komponen pendu kung lainnya seperti sensor, kamera, motor servo untuk pemilah. Perancangan elektrikal (electrical) adalah bagian dimana perancangan pengawatan keseluruhan komponen, mulai dari sensor dan motor untuk penggerak conveyor yang digunakan sebagai pemindah objek yang akan dideteksi hingga ke Arduino Mega 2560 sebagai salah satu komponen kontrol pemilah serta motor servo sebagai pemilah dengan pintu penghalang objek yang telah ditentukan objeknya berdasarkan bentuk dan dimensi. Kemudian dalam perancangan software dilakukan pembuatan koneksi antara arduino mega 2560 dengan komputer yang telah dipasang software LabVIEW dengan menggunakan fitur tambahan NI VISA berfungsi untuk komunikasi antara LabVIEW dengan Arduino Mega2560 dan untuk image processing atau pengolahan citra nya menggunakan NI Vision Assistant untuk
11 mendeteksi objek dengan metode pengolahan citra untuk mendeteksi objek berdasarkan bentuk dan dimensi.
3.2 Perancangan Mekanik (Hardware) dan Elektrikal
Diagram blok pada perancangan Mekanik hardware dapat dilihat pada gambar 3.3 berikut :
Gambar 3.2 Block Diagram Hardware
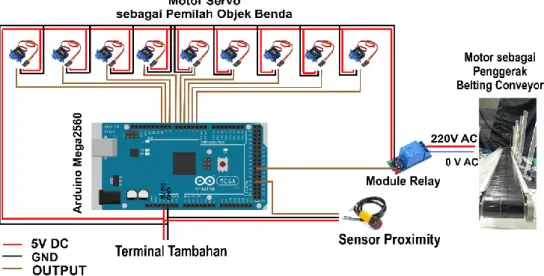
Dari gambar 3.3 dapat dipaparkan bahwa pada saat motor AC 1 fasa aktif, maka module relay sebagai saklar akan mengendalikan motor conveyor yang akan dikontrol oleh arduino mega 2560, yang digunakan untuk membuat motor berhenti apabila sensor proximity aktif. Sensor proximity berfungsi sebagai pemutus atau penyambung jika terdeteksi objek yang akan dipilah pada bidang belting conveyor yang berada didekatnya. Kemudian arduino mega2560 sebagai microcontroller yang akan mengendalikan sensor proximity tersebut. Selain itu arduino mega 2560 juga akan mengendalikan motor servo sebagai pemilah suatu objek yang berdasarkan bentuk dan dimensi.
Agar lebih jelas untuk memahami alur dari penelitian yang dilakukan, dapat dilihat komponen yang di perlukan dalam pembuatan ini pada Gambar 3.3 Wiring Diagram Arduino Mega 250, Motor servo, module relay, dan sensor proximity.
Gambar 3.3 Wiring Diagram Perancangan Sistem Motor conveyor Sensor Proximity Motor Servo Arduino Mega 2560 Module Relay
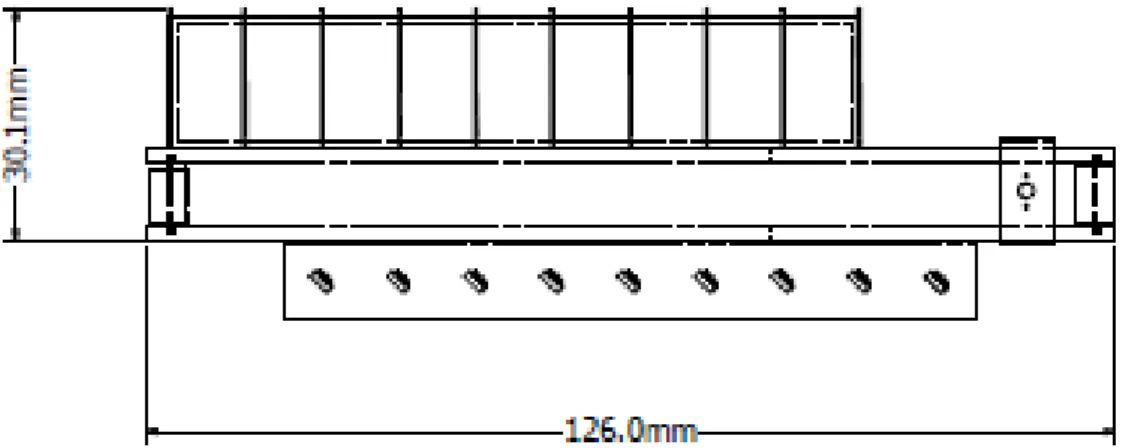
12 Pada bagian ini akan menjelaskan proses perancangan berjalannya sistem. Rancangan keseluruhan bertujuan untuk merealisasikan rancangan alat mesin pemisah barang yang akan dibuat. Conveyor yang memiliki 9 sekat dan sekat tersebut sebagai pemilah antara bentuk dan dimensi. Bentuk dan Dimensi benda berbahan dasar akrilik yang dipilah memiliki 3 bentuk dasar dari lingkaran, segitiga dan persegi dan untuk dimensi memiliki dimensi kecil ,sedang dan besar ukuran. Untuk lebih jelasnya dapat dilihat desain gambar setiap part nya conveyor di jelaskan pada Lampiran B. Rancangan desain mesin pemisah barang dapat dilihat pada gambar di bawah ini :
Gambar 3.4 Desain Conveyor
3.3 Perancangan Sistem
Perancangan sistem mesin direalisasikan dibuat pada Gambar 3.6 pada perancangan mesin ialah kondisi motor conveyor aktif dan menggerak belting untuk pemindahan objek. Setelah objek diletakkan pada belting conveyor kemudian mengenai sensor proximity maka akan memberhentikan belting dan objek berhenti tepat pada jangkauan kamera kemudian diolah mengambil gambar objek benda yang ingin disortir oleh camera webcam.
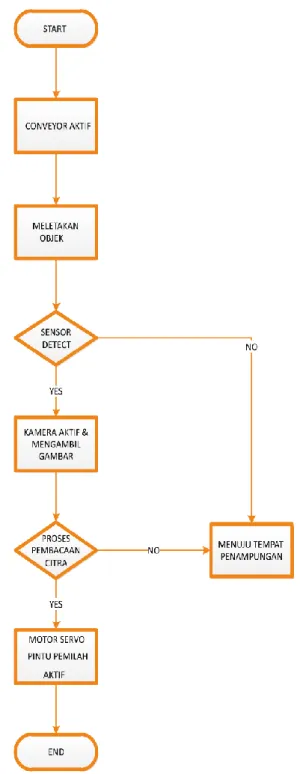
13 Komputer yang telah diintegrasikan oleh LabVIEW akan menampilkan melalui GUI untuk memilah proses metode yang hendak dipisahkan pertama dideteksi objeknya berdasarkan bentuk dan dimensi, jika sesuai lanjut ke proses mikrokontroler yang akan memerintahkan motor servo yang telah ditentukan untuk membuka pintu sekat untuk pemilah, jika sudah maka selesai. Untuk lebih jelasa dapat dilihat pada flowchart Gambar 3.6
14 Gambar 3.7 Flowchart Software
Persegi Sedang Kecil Besar Tidak Sesuai Referensi Sekat Pemilah 5 Sekat Pemilah 4 Sekat Pemilah 6 Segitiga Sedang
Kecil Besar Tidak Sesuai
Referensi Sekat Pemilah 8 Sekat Pemilah 7 Sekat Pemilah 9 Selesai START Pengambilan Citra Objek Pendektesian Benda Lingkaran Sedang
Kecil Besar Tidak Sesuai
Referensi Sekat Pemilah 2 Sekat pemilah 1 Sekat Pemilah 3 Y Y Y Y Y Y Y Y Y Y Y Y N N N N N N N N N N N N
15 Pada gambar 3.7 Flowchart Software menjelaskan alur yang akan mendeteksi objek. Prinsip kerja dimulai dari objek yang akan digunakan sebagai input pada mesin pemisah barang. Langkah selanjutnya yaitu meletakkan objek tersebut pada track conveyor yang telah aktif dimana objek akan melewati Webcam. Citra objek yang didapat oleh Webcam akan diolah kembali di PC (Personal Computer) atau Laptop yang telah terpasang software LabVIEW kemudian diprogram untuk menyeleksi berdasarkan bentuk dasar dari referensi yang telah dimasukkan yaitu persegi, lingkaran, dan segitiga sama sisi. Pada pendeteksi dimensi sendiri memilik tiga referensi yaitu kecil, sedang, dan besar. Jika bentuk objek dan dimensi objek sesuai, maka otomatis akan mengaktifkan sekat yang berfungsi sebagai pemisah yang telah diprogram dan telah ditentukan. Saat ada objek yang tidak sesuai dengan referensi, pintu sekat tidak akan aktif dan objek akan menuju ke bagian akhir penampungan.
3.4 Instrumen Penelitian
Adapun instrumen yang dalam pembuatan alat 1. PC
Berfungsi untuk memonitoring serta mengontrol melalui perangkat lunak yang berada dalam PC tersebut
2. Mikrokontroler
Berfungsi sebagai otak yang membaca nilai dari sensor serta mengontrol dari program yang dibuat dari program tersebut.
3. Motor Servo
Merupakan aktuator sistem pemisah barang atau conveyor 4. Sensor Proximity
Pada penelitian ini digunakan sensor proximity yang berfungsi sebagai pendeteksi benda yang akan diseleksi.
5. Akrilik
Benda yang digunakan menggunakan bahan akrilik 6. Web Camera
Berfungsi sebagai komponen yang utama dalam pengambilan gambar yang kaan diditeksi, Webcam tipe Logitech C270
7. Plat
Plat berfungsi untuk membuat dudukan dari motor servo dan dudukan benda pendukung 8. Kabel
Kabel berfungsi sebagai wiring atau penghubung dari satu komponen ke komponen lainnya.
16
BAB IV
HASIL DAN ANALISA
Untuk mendukung keberhasilan alat ini maka akan disajikan hasil data berupa hasil pengujian alat. Berikut hasil pengujian yang telah dilakukan
4.1 Metode Pengambilan Data
Metode pengambilan data pada mesin ini, yaitu:
1. Mengambil Citra Asli dan Citra Proses masing-masing Bentuk.
2. Mengambil data range object size dalam pixel setiap Dimensi dengan Shape Matching yang telah ditampilkan pada GUI LabVIEW.
4.2 Pengujian Hasil Deteksi Bentuk dan Dimensi
1. Pengujian pada Bentuk Lingkaran dan Dimensi Kecil
Gambar 4.1 Hasil Tampilan Deteksi Lingkaran dengan Dimensi Kecil
Pada Gambar 4.1 ini merupakan tampilan GUI dalam pengambilan data, Pengaturan pada Software LabVIEW. Sebelum memulai, user memilih kamera ke laptop dan pilih pada menu Select Camera. Indicator akan HIJAU jika mendeteksi Bentuk Lingkaran dengan serta menampilkan range size object dalam pixel sesuai dimensi kecil dan akan ditampilkan pada GUI LabVIEW. Berikut adalah hasil Data pada Tabel 4.1
17 Tabel 4.1 Hasil Tampilan Lingkaran dengan range object size Dimensi Kecil
Percobaan Citra Asli Citra Proses range object
size (pixel) Keterangan
1 82131 OK 2 82195 OK 3 82119 OK 4 82102 OK 5 82132 OK 6 82112 OK 7 82121 OK 8 82107 OK 9 82102 OK 10 82195 OK
Dengan melakukan percobaan sebanyak 10 kali, dapat dilihat dengan posisi yang berbeda tetap terdeteksi dan mempengaruhi range size object tetapi tetap terdeteksi. Untuk range object size lingkaran dimensi kecil (3cm) 82000 pixel – 82200 pixel dapat terdeteksi. Jika kurang dari nilai minimal atau nilai maksimal dari range yang telah ditetapkan maka benda tersebut tidak dapat dideteksi sebagai lingkaran kecil oleh kamera.
18
2. Pengujian pada Bentuk Lingkaran dan Dimensi Sedang
Gambar 4.2 Hasil Tampilan Deteksi Lingkaran dengan Dimensi Sedang.
Pada Gambar 4.2 ini merupakan tampilan GUI dalam pengambilan data, Pengaturan pada Software LabVIEW. Sebelum memulai, user memilih kamera ke laptop dan pilih pada menu Select Camera. Indicator akan HIJAU jika mendeteksi Bentuk Lingkaran dengan serta menampilkan range size object dalam pixel sesuai dimensi sedang dan akan ditampilkan pada GUI LabVIEW. Berikut adalah hasil Data pada Tabel 4.2.
Tabel 4.2 Hasil Tampilan Lingkaran dengan range size object Dimensi Sedang Percobaan Citra Asli Citra Proses range size
object (pixel) Keterangan
1 221834 OK 2 221719 OK 3 221895 OK 4 221829 OK 5 221879 OK 6 221624 OK
19
7 221873 OK
8 221813 OK
9 221644 OK
10 221770 OK
Dengan melakukan percobaan sebanyak 10 kali, dapat dilihat dengan posisi yang berbeda tetap terdeteksi dan mempengaruhi range size object tetapi tetap terdeteksi. Untuk range object size lingkaran dimensi sedang (5cm) 221100 pixel – 222000 pixel dapat terdeteksi. Jika kurang dari nilai minimal atau nilai maksimal dari range yang telah ditetapkan maka benda tersebut tidak dapat dideteksi sebagai lingkaran sedang oleh kamera.
3. Pengujian pada Bentuk Lingkaran dan Dimensi Besar
Gambar 4.3 Hasil Tampilan Deteksi Lingkaran dengan Dimensi Besar.
Pada Gambar 4.3 ini merupakan tampilan GUI dalam pengambilan data, Pengaturan pada Software LabVIEW. Sebelum memulai, user memilih kamera ke laptop dan pilih pada menu Select Camera. Indicator akan HIJAU jika mendeteksi Bentuk Lingkaran dengan serta menampilkan range size object dalam pixel sesuai dimensi besar dan akan ditampilkan pada GUI LabVIEW. Berikut adalah hasil Data pada Tabel 4.3
20 Tabel 4.3 Hasil Tampilan Lingkaran dengan range size object Dimensi Besar
Percobaan Citra Asli Citra Proses range size
object (pixel) Keterangan
1 422877 OK 2 422908 OK 3 422910 OK 4 422913 OK 5 422859 OK 6 422896 OK 7 422873 OK 8 422865 OK 9 422871 OK 10 422718 OK
Dengan melakukan percobaan sebanyak 10 kali, dapat dilihat dengan posisi yang berbeda tetap terdeteksi dan mempengaruhi range size object tetapi tetap terdeteksi. Untuk range object size lingkaran dimensi besar (7cm) 422000 pixel – 423000 pixel dapat terdeteksi. Jika kurang dari nilai minimal atau nilai maksimal dari range yang telah ditetapkan maka benda tersebut tidak dapat dideteksi sebagai lingkaran besar oleh kamera.
21
4. Pengujian pada Bentuk Persegi, Dimensi Kecil dan Dirotasi
Gambar 4.4 Hasil Tampilan Deteksi Persegi dengan Dimensi Kecil
Pada Gambar 4.4 ini merupakan tampilan GUI dalam pengambilan data, Pengaturan pada Software LabVIEW. Sebelum memulai, user memilih kamera ke laptop dan pilih pada menu Select Camera. Indicator akan HIJAU jika mendeteksi Bentuk Persegi dengan serta menampilkan range size object dalam pixel sesuai dimensi kecil dan akan ditampilkan pada GUI LabVIEW. Berikut adalah hasil Data pada Tabel 4.4
Tabel 4.4 Hasil Tampilan Persegi dengan range size object Dimensi Kecil
Percobaan Citra Asli Citra Proses range size
object (pixel) Keterangan
1 109444 OK
2 109379 OK
3 109333 OK
4 109342 OK
22 6 109325 OK 7 109594 OK 8 109519 OK 9 109581 OK 10 109758 OK
Dengan melakukan percobaan sebanyak 10 kali, dapat dilihat dengan posisi yang berbeda tetap terdeteksi dan mempengaruhi range size object tetapi tetap terdeteksi. Untuk range object size persegi dimensi kecil (3cm) 109000 pixel – 109900 pixel dapat terdeteksi. Jika kurang dari nilai minimal atau nilai maksimal dari range yang telah ditetapkan maka benda tersebut tidak dapat dideteksi sebagai persegi kecil oleh kamera. Dapat dilihat pada Gambar 4.5
Gambar 4.5 Hasil Tampilan Deteksi Persegi dengan Dimensi Kecil dirotasi
Percobaan sebanyak 10 kali pada persegi kecil dan dan benda dirotasi atau diputar, dapat dilihat dengan posisi yang berbeda tetap terdeteksi dan mempengaruhi pixel dari range size object tetapi tetep terdeteksi. Dapat dilihat pada Tabel 4.5
23 .
Tabel 4.5 Hasil Tampilan Persegi dengan range size object Dimensi Kecil Percobaan Citra Asli Citra Proses range size
object (pixel) Terdeteksi
1 109366 OK 2 109753 OK 3 109893 OK 4 109805 OK 5 109378 OK 6 109814 OK 7 109716 OK 8 109770 OK 9 109727 OK 10 109650 OK
Dari Tabel 4.5 dapat dilihat jika dirotasi tetap terrdeteksi dan range masih dalam jangkauan persegi dimensi kecil (3cm).
24
5. Pengujian pada Bentuk Persegi, Dimensi Sedang dan Dirotasi
Gambar 4.6 Hasil Tampilan Deteksi Persegi dengan Dimensi Sedang
Pada Gambar 4.6 ini merupakan tampilan GUI dalam pengambilan data, Pengaturan pada Software LabVIEW. Sebelum memulai, user memilih kamera ke laptop dan pilih pada menu Select Camera. Indicator akan HIJAU jika mendeteksi Bentuk Persegi dengan serta menampilkan range size object dalam pixel sesuai dimensi sedang dan akan ditampilkan pada GUI LabVIEW. Pengujian dilakukan ketika benda Persegi dirotasi dan benda tetap terdeteksi sebagai persegi sedang. Dapat dilihat pada Gambar 4.7
Gambar 4.7 Hasil Tampilan Deteksi Persegi dengan Dimensi Sedang Dirotasi
Percobaan sebanyak 10 kali pada persegi sedang dan dan benda dirotasi atau diputar, dapat dilihat dengan posisi yang berbeda tetap terdeteksi dan mempengaruhi pixel dari range size object tetapi tetap terdeteksi. Dapat dilihat pada Tabel 4.6
25 Tabel 4.6 Hasil Tampilan Persegi Sedang dengan range size object Dimensi dan Dirotasi
Percobaan Citra Asli Citra Proses range size
object (pixel) Keterangan
1 279587 OK 2 279250 OK 3 279429 OK 4 279982 OK 5 279722 OK 6 279760 OK 7 279478 OK 8 279751 OK 9 279807 OK 10 279433 OK
Dengan melakukan percobaan sebanyak 10 kali, dapat dilihat dengan posisi yang berbeda tetap terdeteksi dan mempengaruhi range size object tetapi tetap terdeteksi. Untuk range object size persegi dimensi sedang (5cm) 279000 pixel – 279900 pixel dapat terdeteksi. Jika kurang dari nilai minimal atau nilai maksimal dari range yang telah ditetapkan maka benda tersebut tidak dapat dideteksi sebagai persegi kecil oleh kamera
26
6. Pengujian pada Bentuk Persegi, Dimensi Besar dan Dirotasi
Pengujian pada bentuk benda Persegi Sedang dapat dilihat pada Gambar 4.8
Gambar 4.8 Hasil Tampilan Deteksi Persegi dengan Dimensi Besar Dirotasi
Percobaan sebanyak 10 kali pada persegi besar dan benda dirotasi atau diputar, dapat dilihat dengan posisi yang berbeda tetap terdeteksi dan mempengaruhi range pixel size object tetapi tetep terdeteksi. Dapat dilihat pada Tabel 4.7
Tabel 4.7 Hasil Tampilan Persegi Besar dengan range size object Dimensi dan Dirotasi Percobaan Citra Asli Citra Proses range size
object (pixel) Terdeteksi
1 548341 OK
2 548323 OK
3 548390 OK
4 548600 OK
27 6 548389 OK 7 548911 OK 8 548606 OK 9 548216 OK 10 548752 OK
Dengan melakukan percobaan sebanyak 10 kali, dapat dilihat dengan posisi yang berbeda tetap terdeteksi dan mempengaruhi range size object tetapi tetap terdeteksi. Untuk range object size persegi dimensi besar (7cm) 548000 pixel – 548900 pixel dapat terdeteksi. Jika kurang dari nilai minimal atau nilai maksimal dari range yang telah ditetapkan maka benda tersebut tidak dapat dideteksi sebagai persegi dimensi besar oleh kamera.
7. Pengujian pada Bentuk Segitiga ,Dimensi Kecil dan Dirotasi
Pengujian pada bentuk benda berbentuk Segitiga Kecil dapat dilihat pada Gambar 4.9
28 Gambar 4.10 Hasil Tampilan Deteksi Segitiga dengan Dimensi Kecil Dirotasi
Pada Gambar 4.9 dan Gambar 4.10 ini merupakan tampilan GUI dalam pengambilan data, Pengaturan pada Software LabVIEW. Sebelum memulai, user memilih kamera ke laptop dan pilih pada menu Select Camera. Indicator akan HIJAU jika mendeteksi Bentuk Segitiga dengan serta menampilkan range size object dalam pixel sesuai dimensi kecil dan akan ditampilkan pada GUI LabVIEW. Untuk hasil Dapat dilihat pada Tabel 4.8.
Tabel 4.8 Hasil Tampilan Segitiga Kecil dengan range size object Dimensi dan Dirotasi Percobaan Citra Asli Citra Proses range size
object (pixel) Keterangan
1 47337 OK 2 47331 OK 3 47819 OK 4 47219 OK 5 47304 OK 6 47230 OK 7 47576 OK
29
8 47079 OK
9 47404 OK
10 47322 OK
Dengan melakukan percobaan sebanyak 10 kali, dapat dilihat dengan posisi yang berbeda tetap terdeteksi serta dirotasi dan mempengaruhi range size object tetap terdeteksi. Untuk range object size segitiga dimensi kecil (3cm) 47000 pixel – 48000 pixel dapat terdeteksi. Jika kurang dari nilai minimal atau nilai maksimal dari range yang telah ditetapkan maka benda tersebut tidak dapat dideteksi sebagai segitiga dimensi kecil oleh kamera.
8. Pengujian pada Bentuk Segitiga, Dimensi Sedang dan Dirotasi
Pengujian pada bentuk benda bentuk Segitiga Sedang dapat dilihat pada Gambar 4.11
Gambar 4.11 Hasil Tampilan Deteksi Segitiga dengan Dimensi Sedang
30 Percobaan sebanyak 10 kali pada Segitiga Sedang dan benda dirotasi atau diputar, dapat dilihat dengan posisi yang berbeda tetap terdeteksi dan mempengaruhi range size object tetapi tetap terdeteksi. Dapat dilihat pada Tabel 4.9
Tabel 4.9 Hasil Tampilan Segitiga Sedang dengan range size object Dimensi Percobaan C1itra Asli Citra Proses Range size
object (pixel) Keterangan
1 124901 OK 2 124621 OK 3 124614 OK 4 124601 OK 5 124957 OK 6 124657 OK 7 124947 OK 8 124958 OK 9 124924 OK 10 125016 OK
Dengan melakukan percobaan sebanyak 10 kali, dapat dilihat dengan posisi yang berbeda tetap terdeteksi serta dirotasi dan mempengaruhi range size object tetap terdeteksi. Untuk range object size segitiga dimensi sedang (5cm) 124000 pixel – 125200 pixel dapat terdeteksi. Jika kurang dari nilai minimal atau nilai maksimal dari range yang telah ditetapkan maka benda tersebut tidak dapat dideteksi sebagai segitiga dimensi sedang oleh kamera.
31 9. Pengujian pada Bentuk Segitiga, Dimensi Besar dan Dirotasi
Pengujian pada bentuk benda Segitiga Besar dapat dilihat pada Gambar 4.13
Gambar 4.13 Hasil Tampilan Deteksi Segitiga dengan Dimensi Besar
Pengujian dapat dilakukan jika benda diputar atau dirotasi dan hasilnya tetap terdeteksi, dapat dilihat pada Gambar 4.14
Gambar 4.14 Hasil Tampilan Deteksi Segitiga dengan Dimensi Besar
Percobaan sebanyak 10 kali pada Segitiga Dimensi Besar dan benda dirotasi atau diputar, dapat dilihat dengan posisi yang berbeda serta dirotasi objeknya tetap terdeteksi dan mempengaruhi nilai pixel dari range size object tetapi tetap terdeteksi. Dapat dilihat pada Tabel 4.10
32 Tabel 4.10 Hasil Tampilan Segitiga Besar dengan range size object Dimensi
Percobaan Citra Asli Citra Proses range size
object (pixel) Keterangan
1 240481 OK 2 240989 OK 3 240102 OK 4 240092 OK 5 240335 OK 6 241015 OK 7 241045 OK 8 241111 OK 9 240151 OK 10 240276 OK
Dengan melakukan percobaan sebanyak 10 kali, dapat dilihat dengan posisi yang berbeda tetap terdeteksi serta dirotasi dan mempengaruhi range size object tetap terdeteksi. Untuk range object size segitiga dimensi besar (7cm) 240000 pixel – 242000 pixel dapat terdeteksi. Jika kurang dari nilai minimal atau nilai maksimal dari range yang telah ditetapkan maka benda tersebut tidak dapat dideteksi sebagai segitiga dimensi sedang oleh kamera.
33
4.3 Pengujian Hasil Deteksi Bentuk dan Dimensi kondisi NG
Gambar 4.15 Hasil Tampilan Deteksi Lingkaran dengan Dimensi Kecil
Pada Gambar 4.15 merupakan hasil pengujian untuk mendapatkan seberapa mampu dari kamera untuk membedakan objek Bentuk Lingkaran dan Berdimensi Kecil, Pengujian dilakukan dengan memberi label tambahan untuk ukuran sehingga apakah dapat mempengaruhi karateristik objek yang akan dideteksi dan dilihat GUI pada LabVIEW. Berikut adalah hasil Data pada Tabel 4.11
Tabel 4.11 Hasil Tampilan Bentuk Lingkaran dengan objek Dimensi Kecil Pengukuran Citra Asli Citra Proses Range size
object (pixel) Keterangan
10 mm 60133 NG
9 mm 62214 NG
34 7 mm 67216 NG 6 mm 70576 NG 5 mm 73213 NG 4 mm 76391 NG 3 mm 79134 NG 2 mm 81232 NG 1 mm 82004 OK
Dengan melakukan percobaan sebanyak 10 kali, dapat dilihat dengan posisi yang berbeda dan ketebalan tambahan label 10 mm – 2 mm terdeteksi sebagai NG. Sedangkan ketebalan 1 mm kamera masih mendeteksi objek sebagai bentuk lingkaran dan dimensi kecil karena masih dalam range size object 82.000 pixel serta bentuk lingkaran. Adapun hasil pengujian yang lain dengan memberikan label secara acak, dapat dilihat pada gambar 4.16, 4.17 dan 4.18 dan teridentifikasi masih sebagai NG.
35 Gambar 4.16 Hasil Tampilan Deteksi Lingkaran dengan Dimensi Kecil Kategori NG
Gambar 4.17 Hasil Tampilan Deteksi Lingkaran dengan Dimensi Kecil Kategori NG
36
4.4 Mengubah nilai Piksel ke milimeter (mm)
Pengambilan data dilakukan dengan cara menampilkan Object Size setiap bentuk dan dimensi yang diambil melalui gambar Grayscale diproses image procesing. Dengan mengambil beberapa sampel objek bentuk Persegi dan Dimensi Sedang (5cm)
Gambar 4.19 Data object size bentuk Persegi dimensi Sedang
Untuk Konversi nilai piksel ke milimeter adalah dengan mengetahui berapa jarak pandang kamera terhadap objek yang akan dideteksi, dari piksel pada layar dibagi dengan jarak terhadap benda sebenarnya. Pada tugas akhir mendeteksi Bentuk dan Dimensi ini piksel pada kamera webcam Logitech C270 bernilai 1280 x 960 Piksel = 1.228.800 piksel = 1,2 Megapixel sedangkan pengukuran yang sebenarnya yang tertangkap oleh kamera adalah 112 mm x 95 mm = 10640 mm2
37 Hasil pembagian antara piksel yang ditampilkan oleh kamera dan yang tertangkap sebenarnya adalah 0.0086. Dari perhitungan konversi piksel pada object size ke milimeter didapatkan nilai 1 Piksel = 0.0086 mm. Maka dari itu untuk membandingkan dimensi yang terbaca oleh LabVIEW dalam satuan pixel dengan dimensi yang sebenarnya pada objek bentuk persegi dengan ukuran masing-masing sisinya 5cm maka didapatkan luasnya 25cm2 = 2500 mm2 . Kemudian untuk pengujian dilakukan sebanyak 15 percobaan dapat dilihat hasilnya pada Tabel 4.12 Tabel Perbandingan Object Size dan nilai milimeter Dimensi object.
38 Tabel 4.12 Tabel Perbandingan Object Size dan nilai milimeter Dimensi object
Percobaan
NILAI (pixel)
Nilai sesudah di
Konversi Luas Permukaan Yang Terbaca Ukuran Asli Objek Persegi (50 mm x 50 mm) 2500 mm2 Perbedaan Error Pixel Object Size nilai X nilai Y
1 pixel = 0,0086
mm
Xmax Xmin Ymax Ymin (Xmax-Xmin) (Ymax-Ymin) X Y (X * Y)
1 876 336 743 204 540 539 4,6 4,6 21,5 2478,5 0,9914 2 880 331 755 210 549 545 4,7 4,7 22,1 2477,9 0,9995 3 879 337 749 205 542 544 4,7 4,7 21,8 2478,2 0,9912 4 881 336 755 207 546 548 4,7 4,7 22,1 2477,9 0,9911 5 883 336 758 208 547 550 4,7 4,7 22,2 2477,8 0,9912 6 884 332 759 204 553 555 4,8 4,8 22,7 2477,3 0,9910 7 886 337 764 209 549 555 4,7 4,8 22,5 2477,5 1,0004 8 887 338 767 209 550 558 4,7 4,8 22,7 2477,3 0,9908 9 889 338 770 210 551 560 4,7 4,8 22,8 2477,2 0,9908 10 865 343 770 208 523 562 4,5 4,8 21,7 2478,3 1,0005 11 892 332 776 211 560 565 4,8 4,6 22,3 2477,7 0,9911 12 893 340 779 211 554 568 4,8 4,9 23,2 2476,8 0,9910 13 895 340 782 212 555 570 4,8 4,9 23,4 2476,6 0,9907 14 896 336 785 212 561 573 4,8 4,9 23,7 2476,3 1,0000 15 898 341 788 213 557 575 4,8 4,9 23,7 2476,3 0,9914
39 Cara mencari persentasi eror pembacaan dimensi objek pada LabVIEW dengan dimensi sebenarnya dengan cara:
% 𝑒𝑟𝑜𝑟 = 𝐽𝑢𝑚𝑙𝑎ℎ 𝑅𝑎𝑡𝑎 − 𝑅𝑎𝑡𝑎 𝐸𝑟𝑟𝑜𝑟 𝐵𝑎𝑛𝑦𝑎𝑘𝑛𝑦𝑎 𝑃𝑒𝑐𝑜𝑏𝑎𝑎𝑛 𝑥 100% %𝑒𝑟𝑜𝑟 = 14,90 15 𝑥 100% %𝑒𝑟𝑜𝑟 = 0,9 % 4.5 Analisa
Dari pengujian yang sudah dilakukan berdasarkan bentuk dan dimensi yang berbeda dapat dianalisa bahwa data pixel object setiap range berubah-ubah dikarenakan intesitas cahaya yang diterima oleh kamera juga berubah-ubah. Dilihat dari Tabel Pengujian, Webcam yang digunakan memiliki keterbatasan yaitu tidak mampu mengatur cahaya yang masuk kedalam lensa. Itulah sebabnya object size yang dikeluarkan oleh interface program berubah-ubah. Dalam hal deteksi ini juga sangat mempengaruhi saat pengambilan objek besar karena harus mengatur jarak peletakan kamera ke benda.
Untuk pendeteksian bentuk menerapkan metode Shape Matching pada suatu objek. Shape Matching akan mencocokkan bentuk berdasarkan template bentuk yang menjadi referensi kemudian akan dideteksi oleh kamera. Saat pengambilan template kondisi intesitas cahaya ke kamera terhadap benda harus memiliki intesitas yang baik agar pengambilan template sempurna. Kelebihan dari Shape Matching adalah ketika objek di rotasi, objek tetap mampu terdeteksi.
40
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan hasil analisa dan pembahasan maka dapat disimpulkan sebagai berikut: 1. Pengolahan Citra dapat dilakukan pada software LabVIEW dengan fitur tambahan
khusus yaitu Vision Assistant.
2. Dengan metode Shape Matching mampu mengidentifikasi bentuk Persegi ,Segitiga , Lingkaran maupun dirotasi atau diputar benda tersebut tetap terdeteksi.
3. Mendeteksi dimensi umum seperti benda dimensi kecil, dimensi sedang ,dimensi besar dengan menggunakan range pixel object yang mampu membedakan benda berdasarkan kecil, sedang, dan besar benda tersebut.
4. Pembacaan nilai pixel object kemudian dikonversikan sesuai dengan dimensi objek benda memiliki persentase error sebesar 0,9%
5.2 Saran
Dalam tugas akhir ini tidak terlepas dari adanya kekurangan dan kelemahan yang membutuhkan saran-saran untuk mendukung kesempurnaannya.
1. Menggunakan metode pengolahan citra yang lainnya untuk mendapatkan hasil yang lebih akurat dalam mendeteksi suatu objek.
2. Kamera yang memiliki resolusi dan kualitas lebih tinggi lagi agar gambar atau citra yang akan diolah didapatkan lebih jelas.
3. Perlu diperhatikan kebersihan bidang belting conveyor agar tidak mengganggu pada pembaacaan kamera untuk proses pengolahan citra.
41
DAFTAR PUSTAKA
[1] Khrisna Adi Dika, Hidayanto Ahmad, dan Isnanto Rizal R “Identifikasi Objek berdasarkan bentuk dan ukuran”, Makalah Seminar Tugas Akhir, Universitas Diponegoro: Semarang, 2006.
[2] Arif Ainur dan Sugeng Dwi Riyanto.“Smart Garden Menggunakan Arduino Uno dan Labview ”. Seminar Nasional Vokasi dan Teknologi (SEMNASVOKTEK),.v.2, p. 130-136, Desember. 2017.
[3] Nugraha, R. D. “Rancang Bangun Mobile Robot Pengikut Objek Berdasarkan Warna dan Bentuk menggunakan Template Matching berbasis Mini PC”. Laporan Tugas Akhir, hal 5-7. Jurusan Sistem Komputer Fakultas Teknologi Informasi Universitas Andalas Padang : Padang, 2016.
[4] Willy Karunia Sandy, Agus Wahyu Widodo, dan Yunita Arum Sari “ Penentuan Keaslian Tanda Tangan Menggunakan Shape Feature Extraction Techniques dengan Metode Klasifikasi K Nearest Neighbouur dan Mean Average Precision “. Jurnal Pengembangan Teknologi Informasi dan Ilmu Komputer. Vol.2, No.3, p.1083-1091, Maret 2018.
[5] Daeng Echo. “Arduino Mega 2560”. Internet:
https://www.academia.edu/14716220/Arduino_Mega2560?auto=download, 2017 [diakses pada 28 April 2017, 20.10 WIB].
[6] Yogi Adi Nugraha “Implementasi Sistem Otomatis Pada Robot Kapal Berbasis Komputer Vision Untuk Kontes Kapal Cepat Tak Berawak Nasional (KKCTBN)”. Skripsi, Universitas Komputer Indonesia, Bandung, 2014.
[7] Suhendro Y. Irianto, “Analisa Citra Digital Dan Content Based Image Retrieval”, Bandar Lampung: Penerbit CV.Anugerah Utama Raharja (AURA), 2016. Hal.67 [8] Endi Permata “Identifikasi Objek Benda Tajam menggunakan Pengolahan Citra
Digital pada Citra X-RAY ”. Jurnal Ilmiah Pendidikan Teknik Elektro.Vol.1,No.1, p.01-14. Oktober 2016
42
45
46 Desain Mekanik Setiap Part
47 Desain Mekanik Body Konveyor
48 Desain Mekanik Keseluruhan
49
50
Program Labview Program Read Sensor
User Interface
51 Program Arduino #include <Servo.h> Servo ser1; Servo ser2; Servo ser3; Servo ser4; Servo ser5; Servo ser6; Servo ser7; Servo ser8; Servo ser9; #define ser_open 90 #define ser_close 180 #define relay_pin 46 #define sens_pin 36 //pin servo #define ser1_pin 2 #define ser2_pin 4 #define ser3_pin 3 #define ser4_pin 6 #define ser5_pin 7 #define ser6_pin 8 #define ser7_pin 9 #define ser8_pin 10 #define ser9_pin 11 String inputString = ""; boolean stringComplete = false; boolean state=false;
void setup() {
// put your setup code here, to run once: Serial.begin(9600);
ser1.attach(ser1_pin); ser2.attach(ser2_pin); ser3.attach(ser3_pin);
52 ser4.attach(ser4_pin); ser5.attach(ser5_pin); ser6.attach(ser6_pin); ser7.attach(ser7_pin); ser8.attach(ser8_pin); ser9.attach(ser9_pin); inputString.reserve(200); pinMode(sens_pin,INPUT_PULLUP); pinMode(relay_pin,1); digitalWrite(relay_pin,1); ser1.write(ser_open); ser2.write(ser_open); ser3.write(ser_open); ser4.write(ser_open); ser5.write(ser_open); ser6.write(ser_open); ser7.write(ser_open); ser8.write(ser_open); ser9.write(ser_open); } void loop() {
// put your main code here, to run repeatedly: if(!state){ digitalWrite(relay_pin,1); } else{ digitalWrite(relay_pin,0); } if(digitalRead(sens_pin)==0){ state=true; } serialRead(); if(stringComplete){ state=false; digitalWrite(relay_pin,1); int servo_index=inputString.toInt();
53 switch(servo_index){
case 1: ser1.write(ser_close); delay(1000); break; case 2: ser2.write(ser_close); delay(1000); break; case 3: ser3.write(ser_close); delay(1000); break; case 4: ser4.write(ser_close); delay(1000); break; case 5: ser5.write(ser_close); delay(1000); break; case 6: ser6.write(ser_close); delay(1000); break; case 7: ser7.write(ser_close); delay(1000); break; case 8: ser8.write(ser_close); delay(1000); break; case 9: ser9.write(ser_close); delay(1000); break;} delay(2000);//delay tutup ser1.write(ser_open); ser2.write(ser_open); ser3.write(ser_open); ser4.write(ser_open); ser5.write(ser_open); ser6.write(ser_open); ser7.write(ser_open); ser8.write(ser_open); ser9.write(ser_open);; delay(1000); inputString=""; stringComplete=false; }} void serialRead() { if (Serial.available()) {
char inChar = (char)Serial.read(); inputString += inChar;
if (inChar == '\n') {
54
57
BIOGRAFI PENULIS
Nama : Riwan Dony Sitorus
Tempat/tanggal lahir : Batam, 08 Oktober 1996 Agama : Kristen Protestan
Alamat Rumah : Batu Aji Lama Kavling Sagulung Sentosa Blok P No.22
Email : [email protected]
Riwayat Pendidikan
1. SMK : SMK Negeri 1 Batam (2011-2014)
2. SMP : SMP Negeri 9 Batam (2008-2011)