4. HASIL DAN PEMBAHASAN
4.1. Hasil rangkaian lengan robot (robotic arm)
Lengan robot yang dibuat penulis diberi nama RAMCES -5 singkatan dari
Robotic Arm with Manual Control sErvoS – 5. Pengujian di Laboratorium
Akustik dan Ilmu Kelautan IPB menunjukkan RAMCES -5 dapat bekerja dengan
baik saat mengambil obyek yang berbeda. Pergerakan menjepit dan
memindahkan obyek dapat dilakukan dengan baik dan terarah. Respon dari
RAMCES-5 terhadap pergerakan sensor tangan terjadi sangat cepat dan tidak
mengalami hambatan.
Lengan robot ini memiliki beberap a keunggulan diantaranya: mampu
mengambil berbagai macam benda dengan batas ukuran dan berat tertentu,
mampu melakukan gerakan seperti manusia, dan pengendali robot menggunakan
sensor yang ada pada tangan manusia. Pengendalian yang dilakukan
menggunakan tangan akan memberi kemudahan dalam mengarahkan gerakan
RAMCES-5 sesuai gerakan tangan.
Alat khusus yang ditempatkan pada RAMCES -5 adalah gripper yang berguna
dalam mencengkram benda yang diinginkan. Bentuk gripper yang dipilih
menyerupai capit karena bentuk ini mudah untuk dibuat dan memiliki gerakan
yang serempak antara kedua bagian capit. Sepasang capit akan memberikan hasil
cengkraman yang seimbang pada obyek yang diambil. Bentuk seperti capit
mempermudah RAMCES-5 mencengkram obyek secara baik saat kondisi vertikal.
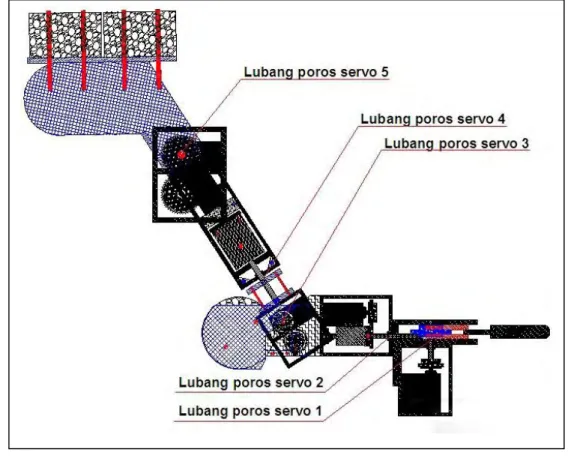
Gambar 10. Tampak samping desain RAMCES -5
4.2. Desain pelindung motor servo RAMCES -5 4.2.1. Desain motor servo fingger
Desain motor servo fingger (servo 1) memiliki bagian yang berbeda dengan
servo lainnya karena memiliki gripper yang menempel dibagian atas pelindung
servo 1. Gripper ini berguna untuk mencengkram obyek yang diinginkan. Skala
untuk ukuran desain ini dipakai satuan mili meter (mm). Lebar bukaan yang
mampu dilakukan gripper adalah sebesar 5,6 cm. Hal ini membuat RAMCES -5
hanya mampu mencengkram obyek dengan ukuran dibawah 5,6 mm. Desain dari
servo 1 ditampilkan pada Gambar 11a,b sedangkan desain gripper ditampilkan
(a) (b)
Gambar 11. (a). Tampak atas desain pelindung motor servo 1, (b). Tampak depan desain pelindung motor servo 1
Gambar 12. Tampak atas desain gripper dari servo 1 Satuan= mili meter
Satuan= mili meter
4.2.2. Desain motor servo wrist dan arm
Motor servo wrist (servo 2) dan arm (servo 3) memiliki desain pelindung
servo yang hampir sama dengan servo 1 hanya saja tidak memiliki perangkat
tambahan seperti gripper. Desain dari servo 2 dan 3 ditampilkan pada Gambar
13a,b.
(a) (b)
Gambar 13. (a). Tampak atas desain motor servo 2 dan 3, (b). Tampak depan desain motor servo 2 dan 3
4.2.3. Desain motor servo elbow
Desain pelindung servo elbow (servo 4) memiliki bentuk yang lebih panjang
dari servo lainnya. Dengan ukuran yang penjang maka servo ini akan membantu
servo didepannya lebih mudah menjangkau obyek -obyek yang jauh. Desain
panjang dipilih untuk menyamakan bagian ini dengan fungsi lengan ma nusia. Hal
ini akan membuat RAMCES -5 lebih mudah dikendalikan dan identik dengan Satuan= mili meter
gerakan lengan manusia. Desain dari servo 4 ditampilkan pada Gambar 14a,b dan
Gambar 15.
(a) (b)
Gambar 14. (a). Tampak depan desain pelindung motor servo 4, (b). Tampak samping desain pelindung motor servo 4
Gambar 15. Tampak atas desain pelindung motor servo 4
4.2.4. Desain motor servo shoulder
Desain servo shoulder (servo 5) dirancang lebih ko koh dan besar dari pada
servo yang lain agar mampu menahan beban berat lebih besar. Desain dari servo
5 ditampilkan pada Gambar 1 6 dan 17.
Gambar 16. Tampak atas desain motor servo 5 Satuan= mili meter
Gambar 17. Tampak depan desain motor servo 5
Bentuk servo 5 seperti kotak dengan bagian bawah terpotong sebagian
berfungsi sebagai tempat menaruh RAMCES -5 pada dudukan wahana tetap atau
mobile yang membawanya. Khusus untuk servo 5 dipasangkan 2 buah bearing
pada poros perputaran stainles steel agar mengurangi b esarnya gesekan saat
berputar. Arkrilik yang tebal digunakan agar servo 5 mampu menahan bobot
RAMCES-5 secara keseluruhan dengan baik. Gear penghubung yang lebih besar
digunakan pada servo 5 karena bobot keseluruhan dari RAMCES -5 bertumpu
pada bagian servo ini sehingga dibutuhkan daya cengkram yang tinggi saat
berputar. Pemasangan kedua gear ini harus diposisikan sedikit longgar agar saat
berputar tidak macet dan mengganggu pergerakan RAMCES -5.
4.2.5. Desain persambungan sendi RAMCES -5
Desain cekungan ini dibuat untuk memberikan kekuatan persambungan sendi
servo sehingga tidak terjadi pergeseran saat servo bekerja. Dengan memberikan
cekungan selain memberi kekuatan persambungan sekaligus mengurangi jeda
yang terjadi saat servo bergerak. Desain persambungan sendi RAMCES -5
ditampilkan pada Gambar 18.
Gambar 18. tampak samping desain persambungan sendi RAMCES -5
4.3. Desain beban penyeimbang motor servo RAMCES -5 4.3.1. Desain penyeimbang servo 1
Pada RAMCES-5 dipakai banyak bahan arkrilik untuk pelindung servo
sehingga menimbulkan berat pada bagian servo penopangnya. Untuk mengurangi
beban yang diterima oleh servo saat berputar maka diberikan beban penyeimbang.
Desain penyeimbang untuk servo 1 tidak digunakan beban tambahan melainkan
menggunakan bobot servo ini sendiri. Hal ini akan mengurangi bobot total
dibagian servo selanjutnya. Desain penyeimbang servo 1 ditampilkan pada
Gambar 19.
Gambar 19. Tampak samping desain penyeimb ang servo 1
Dengan desain ini maka torsi putaran pada servo 2 tidak mengalami
pengurangan sehingga mampu memberikan memutar yang baik. Letak posisi dari
poros servo 2 berada dekat dengan sumbu horizontal gripper agar gerakan
memutar servo 2 tidak mempengaruhi posisi cengkraman gripper. Bentuk
sebenarnya dari desain penyeimbang servo 1 ditampilkan pada Gambar 20.
Gambar 20. Tampak samping bentuk jadi penyeimbang servo 1 Satuan= mili meter
Bagian dalam servo diberikan pencahayaan ya ng cukup dari nyala lampu
LED. Cahaya LED selain berguna menerangi bagian dalam servo juga berfungsi
sebagai indikator motor servo sedang bekerja. Saat motor servo bergerak maka
lampu LED akan berkedip dengan cepat yang menandakan sedang menerima
sinyal pulsa dari mikrokontroler. Dengan terlihatnya bagian dalam servo maka
dapat dengan mudah memantau pergerakan gear penghubung servo.
4.3.2. Desain penyeimbang servo 2
Desain penyeimbang servo 2 berbeda dengan penyeimbang servo 1 agar
didapatkan bobot seimbang dari servo 1 dan 2. Berat yang ada pada servo 1 dan 2
akan diseimbangkan dengan beban penyeimbang yang terletak berlawanan dari
servo ini. Hal ini akan membantu perputaran servo 3 dan menambah torsi yang
dihasilkan. Beban penyeimbang ini te rbuat dari timah padat yang telah dibentuk
seperti tabung. Desain penyeimbang servo 2 ditampilkan pada Gambar 21
sedangkan Gambar 22 menampilkan bentuk sebenarnya penyeimbang servo 2.
Gambar 21. Tampak samping desain penyeim bang servo 2. Satuan= mili meter
Gambar 22. Tampak samping bentuk jadi penyeimbang servo 1
4.3.3. Desain penyeimbang servo 3
Desain penyeimbang pada servo 3 berbeda dengan penyeimbang servo 1 dan
2 karena perbedaan fungsi beban ini. Beba n penyeimbang servo 3 tidak akan
berpengaruh banyak saat posisi servo 4 tepat pada posisi vertikal. Saat servo 4
bergerak dari posisi vertikalnya maka penyeimbang servo 3 akan membantu
gerakan memutar servo 4. Desain penyeimbang servo 3 ditampilkan pada
Gambar 23 sedangkan bentuk sebenarnya ditampilkan pada Gambar 24
Gambar 23. Tampak belakang desain penyeimbang servo 3 Satuan= mili meter
Gambar 24. Tampak depan bentuk jadi penyeimbang servo 3
4.3.4. Desain penyeimbang servo 4
Bagian servo 4 merupakan servo terakhir yang diberi beban penyeimbang
sedangkan bagian servo 5 akan menempel pada wahana yang membawa
RAMCES-5. Pada bagian servo 4 memiliki desain beban penyeimbang yang
lebih besar dibandingkan dengan servo yang lainnya karena servo ini berperan
utama menyeimbangkan seluruh bobot servo didepannya (sevo 1,2, dan 3).
Desain penyeimbang servo 4 ditampilkan pada Gambar 25 sedangkan Gambar 26
menampilkan bentuk sebenarnya penyeimbang servo 4.
Gambar 25. Tampak samping desain penyeimbang servo 4 Satuan= mili meter
Gambar 26. Tampak samping bentuk jadi penyeimbang servo 4
Letak dari beban penyeimbang yang miring berguna untuk mendapatkan titik
grafitasi yang berubah-ubah saat bergerak karena RAMCES -5 memiliki
kemampuan menjauh dan mendekatkan posisi servo 2. Hal ini disebabkan karena
RAMCES-5 memiliki servo 3 yang berperan sebagai sendi engsel tangan
manusia. Dengan menjauhnya posisi servo 2 maka bobot yang dite rima servo 5
akan bertambah. Pada saat inilah penyeimbang servo 4 melakukan fungsinya
yaitu mengurangi gaya grafitasi yang diterima servo 1,2,3 sehingga membantu
pergerakan servo 5 dalam memutar. Bentuk lengkap dan bagian -bagian
RAMCES-5 dapat dilihat pada Lampiran 9.
4.4. Desain sensor pengendali RAMCES -5 4.4.1. Desain sensor fingger
Lengan robot ini dilengkapi dengan 5 buah sensor pada tangan yang berfungsi
menjadi pengendali gerakan robot. Untuk mengendalikan gerakan servo fingger
diperlukan sensor fingger. Sensor fingger kita buat dari cassing yang mampu
manusia dengan cara tertentu kita buat agar sensor dapat bergerak mengikuti
gerakan jemari tangan. Sensor yang dibuat harus dapat dipasang dan dilepaskan
dengan mudah dari jari manusia. Bentuk sensor fingger secara lengkap
ditampilkan pada Gambar 27.
Gambar 27. Tampak bawah sensor fingger
4.4.2. Desain sensor wrist
Sensor wrist merupakan yang paling rumit dari segi desain dibandingkan
dengan sensor lainnya. Hal ini disebabkan oleh bentuk sendi putar pergelangan
tangan yang memiliki poros putar di bagian tengah tulang sehingga membutuhkan
mekanisme khusus untuk mendeteksi gerakan putar sendi ini . Sensor terpasang
menempel dengan kuat pada bagian pergelangan tangan manusia sehingga saat
sendi berputar sensor tidak ikut bergerak. Bentuk sensor wrist ditampilkan pada
Gambar 28 dan 29. Potensio meter Gear penghubung Bagian aktif sensor fingger Bagian aktif sensor fingger
Gambar 28. Tampak bawah sensor wrist
Gambar 29. Tampak atas sensor wrist
4.4.3. Desain sensor arm
Sensor arm diletakkan pada bagian sendi engsel tangan manusia. Sendi
engsel ini memiliki sumbu putar di luar sendi sehingga mudah untuk membuat
desain sensor arm. Sensor arm akan mendeteksi secar langsung gerakan naik
turunnya tangan manusia. Untuk menjaga agar sensor ini tidak bergerak kekanan
Potensio
meter Poros sensor Bagian pasif
sensor wrist Poros penggerak
sensor Bagian aktif sensor
wrist Bagian pasif sensor wrist Bagian aktif sensor wrist Perekat kain
dan kekiri maka bagian aktif sensor dihubungkan dengan bagian pasif sensor
wrist. Potensio meter untuk sensor arm dipasangkan di sebelah luar ba dan sensor.
Bentuk sensor arm ditampilkan pada Gambar 30 dan 31.
Gambar 30. Tampak bawah sensor arm
Gambar 31. Tampak samping kanan sensor arm
4.4.4. Desain sensor elbow
Sensor elbow merupakan sensor yang dirancang untuk dapat mendeteksi
pergerakan putar lengan manusia. Lengan manusia memiliki sumbu putar yang
Potensio meter Gear penghubung Bagian aktif sensor arm Bagian pasif sensor arm Gear penghubung Bagian aktif sensor arm Bagian pasif sensor arm Perekat kain
berada didalam tulang sehingga dibutuhkan desain seperti tabung agar mampu
menghitung besarnya sudut yang dibentuk. Desain seperti tabung dipilih karena
untuk bagian lengan tidak dimungkinkan penggunaan sistem sensor wrist atau
sensor yang lain
Bentuk yang seperti tabung akan membuat sensor elbow bergerak serupa
dengan lengan manusia. Bentuk tabung ini membuat sensor elbow lebih ringkas
dan terlindung. Untuk menguatkan dudukan sensor elbow maka bagian aktif
sensor direkatkan dengan bagian pasif sensor arm sedangkan bagian pasif akan
direkatkan pada bagian aktif sensor shoulder. Sensor elbow diberi penguat
tambahan berupa dua buah perekat kain yang berada di bagian akti f dan pasif
sensor. Bentuk sensor elbow ditampilkan pada Gambar 32.
Gambar 32. Tampak bawah sensor elbow
Poros sensor wrist Bagian pasif sensor elbow Bagian aktif sensor elbow Potensio meter Perekat kain
4.4.5. Desain sensor shoulder
Desain sensor shoulder harus memenuhi kriteria seperti sensor arm
sedangkan bahu manusia merupa kan bagian tangan yang memiliki sendi omni
(berputar kesegala arah). Khusus untuk sensor shoulder dipakai desain dengan
sistem yang berbeda dengan sensor lainnya. Hal ini disebabkan karena sendi bahu
yang semula memiliki banyak sudut putar harus dijadika n menjadi satu sendi
engsel. Bentuk sensor shoulder ditampilkan pada Gambar 33.
Gambar 33. Tampak depan sensor shoulder
Bagian pasif sensor shoulder merupakan tempat bertumpunya semua beban
sensor shoulder. Untuk mencegah bergesernya sensor maka bagian aktif sensor
shoulder dipasangkan dua buah perekat kain. Perekat kain ini selain untuk
menguattkan sensor shoulder juga sebagai tempat merekatnya bagian pasif sensor
elbow. Bentuk seluruh sensor RAMCES -5 ditampilkan pada Lampiran 10 d an
sensor yang telah terpasang di tangan ditampilkan pada Lampiran 11.
Bagian aktif sensor shoulder Bagian pasif sensor shoulder Potensio meter Poros sensor wrist Perekat kain
4.5. Rangkaian kontroler RAMCES -5
Rangkaian kontroler RAMCES -5 terdiri dari tiga bagian penting, yaitu:
bagian trafo, regulator, dan mikrokontroler. Bagian trafo dipasangkan s ejajar dan
berpasangan sehingga panas yang dihasilkan dapat terbuang dengan baik. Untuk
menurunkan tegangan yang dihasilkan trafo digunakan regulator yang dilengkapi
dengan heat sink sebagai pembuang panas. Karakteristik regulator yang dipakai
ditampilkan pada Lampiran 12. Bagian mikrokontroler diletakkan berdekatan
dengan kipas kecil agar tidak terkena panas dari trafo dan regulator. Untuk
mengurangi panas yang ada didalam kotak maka dipasangkan kipas pendingin
pada bagian sisi depan kontroler. Soket kabel sensor dan servo dijadikan tempat
persambungan kabel motor servo dan sensor RAMCES. Bentuk kontroler
RAMCES-5 ditampilkan pada Gambar 34.
Gambar 34. Tampak atas kontroler RAMCES -5 beserta bagian-bagiannya,
Bagian penyearah tegangan AC Bagian Mikrokontroler soket kabel servo Sekring soket kabel sensor Lubang keluaran angin
Saklar Kabel power Kipas
4.6. Hasil perhitungan perangkat keras RAMCES -5 4.6.1. Tegangan keluaran sensor RAMCES -5
Sensor RAMCES-5 memiliki 3 buah kaki berbeda yaitu kaki 1,2, dan 3.
Sensor ini terpisah satu sama lainnya sehingga dapat bergerak bebas dan memiliki
sudut putar yang berbeda. Hasil uji pengukuran tegangan keluaran sensor
ditampilkan pada Tabel 8.
Tabel 8. Hasil pengukuran tegangan yang dikeluarkan sensor pada sudut maksimum dan minimum.
No Jenis Sensor
Sudut Sensor yang dapat dibentuk
(derajat)
Tegangan Vinput (kaki 1)
(mili Volt)
Tegangan yang Keluar Pada Kaki 2 Sensor
(mili Volt) Hasil Pengamatan Kondisi Sensor Tangan 1 Sensor Fingger Max 100 1288 350 Membuka Min 0 950 Menutup 2 Sensor Wrist Max 120 1288 298 Berputar Min 0 920 Normal 3 Sensor Arm Max 122 1288 83 Menekuk Min 0 676 Lurus 4 Sensor Elbow
Max 120 1288 230 Menekuk kedada
Min 0 700 Membuka
5 Sensor
Shoulder
Max 90 1288 260 Mengangkat
Min 0 1030 Normal
Data ini menunjukkan bahwa tegangan maksimum untuk kaki 1 sa at kondisi
maksimum dan minimum sebesar 1288 mili Volt. Tegangan input semua sensor
memiliki nilai yang sama karena tegangan semua masukan potensi meter
dihubungkan secara pararel. Rangkaian pararel ini akan membuat arus yang
masuk untuk setiap kaki 3 ak an dibagi menjadi 5 bagian sehingga tidak perlu
memakai banyak resistor dan kabel untuk sensor.
Jika melihat keluaran kaki 2 sensor saat kondisi sudut maksimum maka
tegangan terbesar ada pada sensor fingger dengan nilai sebesar 350 mili Volt.
Nilai terendah ada pada sensor arm dengan nilai sebesar 83 mili Volt. Hal ini
dengan sensor arm. Tegangan terendah saat sudut minimum terdapat pada sensor
arm dengan nilai 676 mili Vo lt sedangkan yang terbesar ada pada sensor shoulder
sebesar 1030 mili Volt. Keluaran tegangan terendah ini disebabkan oleh desain
gear penghubung pada sensor shoulder yang mampu menghasilkan putaran lebih
banyak dibandingkan sensor yang lain.
Semua hasil pengukuran tegangan kaki 2 tidak ada nilai yang melebihi batas
maksimum Vref. Budiharto (2008) menjelaskan bahwa tegangan referensi
internal sebesar 2,56 Volt. Tegangan yang dipakai pada sensor RAMCES -5
kurang dari 2,56 sehingga kita yakin dapat menggunakan tegangan keluaran
sensor sebagai input dari ADC tanpa resiko terjadi kerusakan.
4.6.2. Besar sudut servo RAMCES -5 dengan perbedaan lebar pulsa
Setiap servo RAMCES-5 memiliki batas lebar pulsa untuk melakukan
gerakan memutar dengan sudut tertentu. Lebar pulsa yang diberikan tidak boleh
melebihi apa yang sudah ditentukan dari pabrik pembuatnya. Untuk mendapatkan
lebar pulsa maksimum dan minimum pada program maka kita lakukan
pengukuran saat motor servo RAMCES -5 terpasang. Hasil dari pengukuran lebar
pulsa maksimum dan sudut yang dibentuk diperoleh Tabel 9.
Tabel 9. Hasil pengukuran lebar pulsa dan sudut yang dapat dibuat.
No Jenis
Servo
Besar Lebar Pulsa Maksimum dan Minimum
Sudut Putaran
Pada Servo Keterangan
1 Servo Fingger 550 0 Keadaan tertutup 1350 67 Keadaan terbuka 2 Servo Wrist 450 90 Memutar kekanan 1500 0 Normal 3
Servo Arm 600 0 Normal
2000 120 Mengangkat 4 Servo Elbow 800 0 Berputar kekiri 2300 160 Berputar kekanan 5 Servo Shoulder 600 100 Mengangkat 1850 0 Normal
Data ini menunjukkan bahwa semua karakteristik gerakan servo berbeda satu
sama lainnya. Lebar pulsa yang berbeda untuk setiap servo karena disesuaikan
dengan bentuk dan besarnya pergerakan RAMCES -5. Hal ini disebabkan karena
perbedaan jenis servo yang dipakai pada RAMCES -5.
Hasil perhitungan lebar pulsa yang diberikan terhadap besar sudut putar
memperlihatkan terdapat perbedaan antara servo arm dan servo shoulder dimana
nilainya berkebalikan saat melakukan gerakan men gangkat. Untuk servo arm
membutuhkan lebar pulsa maksimum untuk mengangkat sedangkan servo
shoulder membutuhkan lebar pulsa minimum. Hal ini terjadi karena posisi motor
servo yang tidak sama sehingga membutuhkan lebar pulsa yang berbeda.
4.6.3. Daya cengkram gripper.
Pengujian daya cengkram gripper RAMCES-5 hanya dilakukan sebanyak
sepuluh kali dengan obyek yang berbeda. Pengulangan pengambilan obyek
sebanyak tiga kali lalu diambil kesimpulan hasil pengamatannya. Hasil dari
pengujian ini ditampilkan pada Tabel 10.
Tabel 10. Hasil pengujian daya cengkram gripper pada berbagai macam bentuk obyek. U la n ga n
Bentuk Obyek yang Dicengkram Dimensi Obyek (cm) Bobot Obyek (gram) Kondisi Pemukaan Obyek Hasil Pengamatan Cengkraman Gripper
1 Kotak DMM 12,5 x 6,8 x 2,4 109 Kasar Baik
2 Kotak arkrilik 10 x 4,3 x 10,3 61,7 Licin Agak bergeser
3 Kotak putih 6,5 x 5 x 4 126,3 Kasar Butuh torsi besar
4 Kotak baterai 10 x 5 x 3,2 84,5 Kasar Baik
5 Spidol 14 x 1 6 Licin Baik
6 Silinder besi 6,2 x 3 57,4 Kasar Baik
7 Silinder besi padat 3,5 x 4 168,7 Kasar Butuh torsi besar
8 Tabung obat 10,5 x 2,2 17,7 Kasar Baik
9 Obeng besar 4,5 x 3 60,9 Bergelombang Sedikit goyang
10 Obeng sedang 8,5 x 2 29,3 kasar Baik
Keterangan: - kasar, memiliki permukaan yang t idak rata - bergelombang, memiliki permukaan zigzag - licin, memiliki permukaan halus dan rata
Data ini kita dapat melihat bahwa gripper akan mengalami kegagalan dalam
pencengkraman obyek apabila permukaan obyek licin dan bobotnya cukup besar.
Dengan permukaan obyek yang licin akan mengurangi daya cengkram gripper.
Saat gripper mencengkram kotak arkrilik terjadi pergeseran posisi cengkraman
saat diangkat. Pergeseran yang terjadi tidak sampai membuat benda yang
dicengkram jatuh karena permukaan gripper dilengkapi dengan bantalan karet.
Bantalan karet ternyata mampu menambah grip pada saat menjepit obyek. Tanpa
adanya bantalan karet kemungkinan kotak arkrilik yang licin akan langsung jatuh.
Keadaan gripper saat membuka dan menutup capit ditampilkan pada
Lampiran 13.
4.7. Perangkat lunak pengendali RAMCES -5
Pembuatan perangkat lunak berupa program kendali gerak mikrokontroler
menggunakan software BASCOM-AVR dengan bahasa BASIC. Program yang
telah dibuat akan didownload kedalam mikrokontroler menggunakan downlo ader
ISP. Program ini akan mengukur besaran tegangan dari sensor lalu akan
memberikan respon berupa lebar pulsa yang berbeda kepada motor servo.
Kualitas penerimaan data dari sensor ke dala m mikrokontroler secara umum
berjalan cukup baik. Hal ini ditunjukkan reaksi gerak motor servo yang sesuai
dengan arah gerak sensor. Sintaksis (perintah) yang ada didalam program ini
ditampilkan pada Lampiran 14.
RAMCES-5 memiliki prinsip kerja ro bot sama dengan seperti robot buatan
Victor Scheinman tahun 1969 yang dikendalikan menggunakan komputer.
Lengan robot RAMCES-5 dikendalikan menggunakan prinsip pengendalian yang
pengendalian robot ini sama seperti metode yang digunakan oleh ilmuan Salt Lake
City dan tim peraga film The Lost World tahun 1997 yang menggunakan bagian
tubuh manusia untuk mengendalikan robot.
RAMCES-5 merupakan robot tangan yang memiliki level pergerakan
sebanyak 5 buah (5 Degree Of Freedom). Level pergerakan ini yang
memudahkan gerakan RAMCES -5 dalam mengambil obyek benda yang terletak
secara horizontal atau vertikal. Pitowarno (2006) menjelaskan gerakan holomonic
merupakan sistem gerak yang serupa dengan gerak ujung pensil atau pulpen ke
segala arah di permukaan kertas sesuai dengan keinginan. Dengan Degree Of
Freedom (DOF) sebanyak 5 buah membuat RAMCES -5 dapat bergerak dan
menjangkau ke segala arah tanpa ada halangan. Hal ini sama dengan gerakan
holomonic pada sebuah pensil di atas kertas.
RAMCES-5 dapat bergerak kesegala arah dirancang agar mampu mengikuti
gerakan tangan manusia yang dapat menjangkau ke semua sudut dimensi.
Kelebihan ini membuat RAMCES -5 bergerak sesuai dengan k emauan kita dengan
perantara sensor yang terpasang pada tangan manusia. Penggunaan motor servo
sebagai alat penggerak memberikan hasil gerakan yang halus dan memiliki sudut
yang sama dengan tangan manusia.
5.1. Kesimpulan
Hasil dari penelitian ini menunjukkan bahwa RAMCES -5 dapat berputar
dengan baik dan mampu mengangkat berbagai macam obyek benda. Gripper
pada RAMCES-5 hanya dapat mencengkram obyek yang memiliki ukuran
kurang dari 5,5 cm. Hasil pengamatan struk tur RAMCES-5 menunjukkan bahwa
penggunaan bahan arkrilik 5 mm yang didukung dengan penggunaan mur 2 mm
dan arkrilik siku mampu menopang berat RAMCES -5 dengan baik.
Penggunaan mikrokontroler ATMega8535 dengan fasilitas ADC 8 buah dan
pencacahan 10 bit dapat berjalan dengan baik mengontrol gerakan RAMCES -5.
Penggunaan pemberat penyeimbang bisa mengurangi pengaruh gravitasi bumi
pada RAMCES-5 sehingga dapat bergerak lebih bertenaga mengangkat benda
yang diinginkan dengan batasan berat sebesar +/ - 170 gram.
5.2. Saran
Penelitian selanjutnya mengenai lengan robot sebaiknya gunakan model servo
dan desain yang lebih ramping lagi untuk mengurangi beban keseluruhan lengan
robot. Gunakan penghalus tegangan DC yang lebih baik dalam rangkaian power
supply untuk mengurangi getaran pada motor servo. Desain sensor wrist dan
elbow harus lebih baik lagi agar mendapatkan mendeteksi gerakan memutar