32
BAB III
PEMBAHASAN
Pada bab ini akan dibahas mengenai perancangan sistem, yang meliputi perangkat keras, dimana bagian ini menunjang dalam pengoperasian sistem sehingga akan diperoleh hasil yang diinginkan. Perancangan perangkat keras meliputi perancangan rangkaian keypad 4x4, rangkaian LCD 16X2, Rangkaian
driver, RTC, sensor EC, sensor PH dan rangkaian keseluruhan sistem Arduino
Mega.
3.1 Blok Diagram
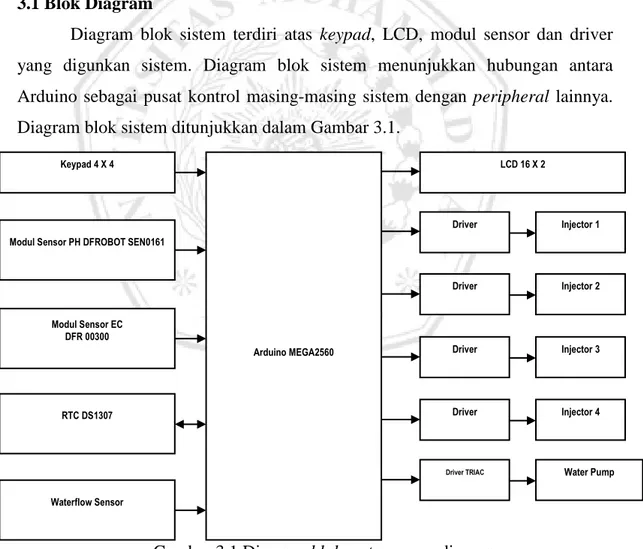
Diagram blok sistem terdiri atas keypad, LCD, modul sensor dan driver yang digunkan sistem. Diagram blok sistem menunjukkan hubungan antara Arduino sebagai pusat kontrol masing-masing sistem dengan peripheral lainnya. Diagram blok sistem ditunjukkan dalam Gambar 3.1.
Gambar 3.1 Diagram blok system yang dirancang
Dari cara kerja sistem secara keseluruhan, maka dapat di uraikan fungsi tiap-tiap blok diagram adalah sebagai berikut :
Keypad 4 X 4
Arduino MEGA2560 Modul Sensor PH DFROBOT SEN0161
LCD 16 X 2 Modul Sensor EC DFR 00300 RTC DS1307 Waterflow Sensor Driver Driver Injector 1 Injector 2 Driver Injector 3 Driver Injector 4
33 1. Arduino Mega 2560 berfungsi sebagai pengontrol masing-masing sistem
untuk, mengakses jam RTC, membaca sensor dan megendalikan driver.
2. Liquid Cristal Display (LCD) berfungsi untuk menampilkan data yang
diolah oleh sistem arduino.
3. Driver berfungsi sebagai pengendali rangkaian injector dan water pump
melalui arduino.
4. Keypad bertugas untuk menginput data dan seting user pada sistem.
5. Waterflow sensor digunakan sebgai sensor pembaca volume aliran air.
6. RTC DS1307 digunakan untuk membaca data waktu secar realtime.
3.2 Perancangan Alat
Agar dapat mengimplementasikan alat pengendalai nutrisi hidroponik, dibagi menjadi dua bagian yaitu perancangan mekanik dan perancangan hadware.
Didalam hal ini perancangan meliputi dua hal, yang pertamana adalah perancangan box dan yang kedua adalah perancangan pada injektor nutri dengan hidroponik dan peletakan sensor pH dan EC pada tabung nutrisi. Sedangkan perancangan sistem elektrik meliputi rangkaian driver, RTC, sensor pH, sensor EC dan keseluruhan sistem Arduino Mega.
3.2.1 Perancangan Mekanik
Dimana dalam perancangan mekanik ini terbagi menjadi dua bagian, merancangan mekanik box dan perancangan injektor nutri.
3.2.2 Perancangan Mekanik Box
Pada perancangan box ini dibuat dari bahan akrilik dan triplek berwarna hitam denga total panjang 36 cm , lebar 16 cm dan tinggi 16cm berat box ini sekitar 0,8 kg.
34 1. Bagian Atas
Dari gambar 3.2 dapat dilihat desain luar alat yang terdiri dari
display LCD, keypad, inpiut EC dan input pH.
Gambar 3.2 Desain box Bagian Atas 2. Bagian Belakang
Pada bagian belakang box terdiri dari lubang output sistem untuk penyambungan output sistem. Terdapat pulah sumber listrik AC
memberikan supplay listrik ke sistem box . Secara keseluruhan bagian belakang box dapat dilihat pada gambar 3.3
35 3. Bagian Samping Box
Pada bagian samping kiri tidak terdapat input atau output hanya dinding box . Secara keseluruan bagian sampig box dapat dilihat di gambar 3.4
Gambar 3.4 Desain box Bagian Samping box
3.2.3 Perancangan Mekanik Injektor Nutrisi
Dari gambar 3.5 dapat dilihat injektro terpasang pada tandon nutrisi dan pipa hidroponik juga jadi satu tabung. Agar injektor nyala maka dibutuhkan outputan dosis nutri yang suda dibaca oleh sensor pH dan sensor EC dan memberikan kebutuhan nutrisi yang diinginkan. Desain mekanik injektor nutri dapat dilihat pada gambar 3.5.
36 3.2.4 Mekanik Pada Pipa Hidroponik
Mekanik pada pipa hidroponik dipasang dengan tabung nutrisi. Kemudian air nutri di semburkankan ke atas dalam pipa dengan pompa air, daya sembur pompa minimal 2 m. Gambar mekanik pipa hidroponik dapat dilhat pada gambar 3.6.
Gambar 3.6 Desain Pipa Hidroponik
3.2.5 Mekanik Pompa Injektor
Mekanik pompa injektor ini untuk mendorong nutrisi dan pH ke injektro. Agar dapat menyemburkan nutri dan pH ke dalam tabung penampung. Gabar mekanik pompa injektor dapat dilihat pada gambar 3.7
37 3.2.6 Mekanik Hidroponik Keseluruhan
Sistem pengendali hidroponik ini berjalan saat sensor pH dan EC ada perubahan dosis yang disetting sesuai jenis tanaman hidroponik. Gamabar mekanik hidroponik keseluruhan dapat dilihat pada gambar 3.8
Gambar 3.8 Mekanik Hidroponik keseluruhan
3.3 Perancangan Perangkat Keras (Hardware)
Untuk perancangan perangkat keras (Hardware) meliputi perancangan rangkaian sistem serta analisis rancangannya. Dalam perancangan ini, terlebih dahulu dibuat diagram blok secara keseluruhan yang kemudian dirancang penjabaran tiap bloknya.
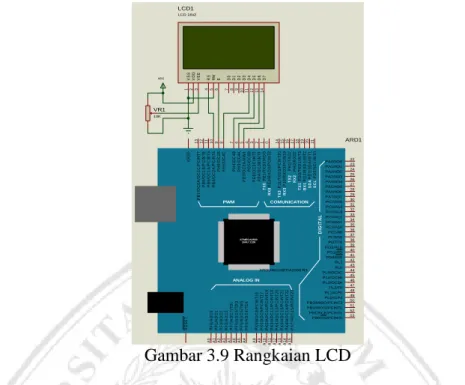
3.3.1 Perancangan rangkaian LCD
Bagian penampil informasi pada perancangan block diagram adalah menggunakan LCD 16X2, dimana agar sistem yang dikendalikan oleh
microcontroller ARDUINO MEGA2560 dapat diketahui dan dimengerti oleh
manusia, maka diperlukan sebuah penampil informasi LCD. LCD digunakan untuk menampilkan menu-menu registrasi pada sistem dan perintah-perintah yang dipantau manusia dalam melakukan pengontrolan terhadap pintu yang dikontrol. LCD yang digunakan adalah LCD M1632 yang mampu menampilkan karakter 2
38 baris 16 Karakter. Adapun pin koneksi rangkaian LCD terhadap Controller
(MCU) ditunjukkan pada Gambar 3.9
Gambar 3.9 Rangkaian LCD
Potensio 10K pada rangakain LCD diatas merupakan pembagi tegangan yang dihubungkan ke pin VEE LCD. Pin ini berfungsi untuk mengatur kontras LCD sesuai keinginan. Untuk pin WR digroundkan karena sifatnya hanya menulis dari MCU ke LCD, sementara pin 15 dan 16 adalah input tegangan LED
Backlight LCD, sehingga LCD dapat kelihatan terang meskipun malam hari.
3.1.1 Perancangan Keypad 4x4
Pada perancangan alat ini, untuk proses masukan seting kelembaban dari
user, maka diguakan keypad 4X4. Adapun konfigurasi pin-pin yang dipakai rangkaian keypad terhadap microcontroller ARDUINO MEGA ditunjukkan pada Gambar 3.10:
Gambar 3.10 Perancangan Keypad 4x4
PWM COMUNICATION D IG IT A L ANALOG IN ATMEGA2560 16AU 1126 T X 0 T X 3 T X 2 T X 1 S D A S C L R X 0 R X 3 R X 2 R X 1 P D 0 /S C L /I N T 0 2 1 P D 1 /S D A /I N T 1 2 0 P D 2 /R X D 1 /I N T 2 1 9 P D 3 /T X D 1 /I N T 3 1 8 P H 0 /R X D 2 1 7 P H 1 /T X D 2 1 6 P J 0 /R X D 3 /P C IN T 9 1 5 P J 1 /T X D 3 /P C IN T 1 0 1 4 P E 0 /R X D 0 /P C IN T 8 0 P E 1 /T X D 0 /P D O 1 P E 4 /O C 3 B /I N T 4 2 P E 5 /O C 3 C /I N T 5 3 P G 5 /O C 0 B 4 P E 3 /O C 3 A /A IN 1 5 P H 3 /O C 4 A 6 P H 4 /O C 4 B 7 P H 5 /O C 4 C 8 P H 6 /O C 2 B 9 P B 4 /O C 2 A /P C IN T 4 1 0 P B 5 /O C 1 A /P C IN T 5 1 1 P B 6 /O C 1 B /P C IN T 6 1 2 P B 7 /O C 0 A /O C 1 C /P C IN T 7 1 3 A R E F PA0/AD0 22 PA1/AD1 23 PA2/AD2 24 PA3/AD3 25 PA4/AD4 26 PA5/AD5 27 PA6/AD6 28 PA7/AD7 29 PC6/A14 31 PC5/A13 32 PC4/A12 33 PC3/A11 34 PC2/A10 35 PC1/A9 36 PC0/A8 37 PD7/T0 38 PG2/ALE 39 PG1/RD 40 PG0/WR 41 PL7 42 PL6 43 PL5/OC5C 44 PL4/OC5B 45 PL3/OC5A 46 PL2/T5 47 PL1/ICP5 48 PL0/ICP4 49 PB3/MISO/PCINT3 50 PB2/MOSI/PCINT2 51 PB1/SCK/PCINT1 52 PB0/SS/PCINT0 53 P K 7 /A D C 1 5 /P C IN T 2 3 A 1 5 P K 6 /A D C 1 4 /P C IN T 2 2 A 1 4 P K 5 /A D C 1 3 /P C IN T 2 1 A 1 3 P K 4 /A D C 1 2 /P C IN T 2 0 A 1 2 P K 3 /A D C 1 1 /P C IN T 1 9 A 1 1 P K 2 /A D C 1 0 /P C IN T 1 8 A 1 0 P K 1 /A D C 9 /P C IN T 1 7 A 9 P K 0 /A D C 8 /P C IN T 1 6 A 8 P F 7 /A D C 7 /T D I A 7 P F 6 /A D C 6 /T D O A 6 P F 5 /A D C 5 /T M S A 5 P F 4 /A D C 4 /T C K A 4 P F 3 /A D C 3 A 3 P F 2 /A D C 2 A 2 P F 1 /A D C 1 A 1 P F 0 /A D C 0 A 0 R E S E T PC7/A15 30 ARD1 ARDUINO MEGA2560 R3 D 7 1 4 D 6 1 3 D 5 1 2 D 4 1 1 D 3 1 0 D 2 9 D 1 8 D 0 7 E 6 R W 5 R S 4 V S S 1 V D D 2 V E E 3 LCD1 LCD 16x2 vcc VR1 10K PWM COMUNICATION D IG IT A L ANALOG IN ATMEGA2560 16AU 1126 T X 0 T X 3 T X 2 T X 1 SDA S C L R X 0 R X 3 R X 2 R X 1 P D 0 /S C L /IN T0 21 P D 1 /S D A /IN T1 20 P D 2 /R X D 1 /I N T2 19 P D 3 /T X D 1 /IN T3 18 P H 0 /R X D 2 17 P H 1 /T X D 2 16 P J 0 /R X D 3 /P C IN T9 15 P J 1/T X D 3 /P C IN T 10 14 P E 0 /R X D 0 /P C IN T8 0 P E 1 /T X D 0 /P D O 1 P E 4 /O C 3 B /IN T 4 2 P E 5/O C 3C /IN T 5 3 P G 5 /O C 0 B 4 P E 3/O C 3A /A IN 1 5 P H 3 /O C 4 A 6 P H 4 /O C 4 B 7 P H 5 /O C 4 C 8 P H 6 /O C 2 B 9 P B 4/O C 2 A /P C IN T4 10 P B 5/O C 1 A /P C IN T5 11 P B 6/O C 1 B /P C IN T6 12 P B 7 /O C 0 A /O C 1C /P C IN T7 13 A R E F PA0/AD022 PA1/AD123 PA2/AD224 PA3/AD325 PA4/AD426 PA5/AD527 PA6/AD628 PA7/AD729 PC6/A14 31 PC5/A13 32 PC4/A12 33 PC3/A11 34 PC2/A10 35 PC1/A9 36 PC0/A8 37 PD7/T0 38 PG2/ALE39 PG1/RD 40 PG0/WR41 PL7 42 PL6 43 PL5/OC5C44 PL4/OC5B 45 PL3/OC5A 46 PL2/T547 PL1/ICP548 PL0/ICP449 PB3/MISO/PCINT350 PB2/MOSI/PCINT251 PB1/SCK/PCINT1 52 PB0/SS/PCINT0 53 P K 7 /A D C 1 5 /P C IN T 23 A 1 5 P K 6 /A D C 1 4 /P C IN T 22 A 1 4 P K 5 /A D C 1 3 /P C IN T 21 A 1 3 P K 4 /A D C 1 2 /P C IN T 20 A 1 2 P K 3 /A D C 1 1 /P C IN T 19 A 1 1 P K 2 /A D C 1 0 /P C IN T 18 A 1 0 P K 1 /A D C 9 /P C IN T 1 7 A 9 P K 0 /A D C 8 /P C IN T 1 6 A 8 P F 7 /A D C 7 /T D I A 7 P F 6 /A D C 6 /T D O A 6 P F 5 /A D C 5 /T M S A 5 P F 4 /A D C 4 /T C K A 4 P F 3 /A D C 3 A 3 P F 2 /A D C 2 A 2 P F 1 /A D C 1 A 1 P F 0 /A D C 0 A 0 R E S E T PC7/A15 30 ARD1 ARDUINO MEGA2560 R3 1 2 3 6 5 4 8 9 = 7 + + C ON 0 A B C D 1 2 3 4
39 Pada Perancangan rangkaian keypad sebagaimana Gambar 3.10 menggunakan metode scanning baris yang dilakukan oleh perangkat lunak, dimana pada proses tersebut 4 baris dari keypad diisi dengan cara hanya salah satu baris yang bernilai nol, sementara baris lain berlogika 1, dengan demikian untuk mengetahui salah satu tombol yang ditekan, sistem arduino melakukan pembacaan kolom untuk mengetahui apakah penekanan tombol terhadap data yang diberikan pada baris keypad.
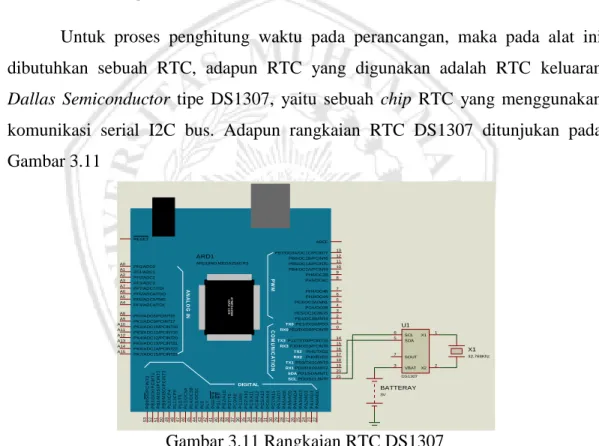
3.3.2 Perancangan RTC DS1307
Untuk proses penghitung waktu pada perancangan, maka pada alat ini dibutuhkan sebuah RTC, adapun RTC yang digunakan adalah RTC keluaran
Dallas Semiconductor tipe DS1307, yaitu sebuah chip RTC yang menggunakan
komunikasi serial I2C bus. Adapun rangkaian RTC DS1307 ditunjukan pada Gambar 3.11
Gambar 3.11 Rangkaian RTC DS1307
Nilai crystal 32,768Khz ditentukan dengan mengacu pada lembar datasheet, sementara itu baterai 3V yang digunakan menggunakan lithium 3V CR2032 untuk melakukan proses update time pada saat catu daya utama RTC dinonaktifkan. RTC DS1307 diakses secara serial menggunakan interface I2C, sehingga hanya membutuhkan dua jalur yaitu clock dan data yang pada perancangan ini.
P W M C O M U N IC A T IO N DIGITAL A N A L O G IN A T M E G A 25 6 0 1 6 A U 11 2 6 TX0 TX3 TX2 TX1 SDA SCL RX0 RX3 RX2 RX1 PD0/SCL/INT0 21 PD1/SDA/INT1 20 PD2/RXD1/INT2 19 PD3/TXD1/INT3PH0/RXD2 18 17 PH1/TXD2 16 PJ0/RXD3/PCINT9 15 PJ1/TXD3/PCINT10 14 PE0/RXD0/PCINT8PE1/TXD0/PDO 0 1 PE4/OC3B/INT4 2 PE5/OC3C/INT5 3 PG5/OC0B 4 PE3/OC3A/AIN1 5 PH3/OC4A 6 PH4/OC4B 7 PH5/OC4C 8 PH6/OC2B 9 PB4/OC2A/PCINT4 10 PB5/OC1A/PCINT5 11 PB6/OC1B/PCINT6 12 PB7/OC0A/OC1C/PCINT7 13 AREF P A 0 /A D 0 2 2 P A 1 /A D 1 2 3 P A 2 /A D 2 2 4 P A 3 /A D 3 2 5 P A 4 /A D 4 2 6 P A 5 /A D 5 2 7 P A 6 /A D 6 2 8 P A 7 /A D 7 2 9 P C 6 /A 1 4 3 1 P C 5 /A 1 3 3 2 P C 4 /A 1 2 3 3 P C 3 /A 1 1 3 4 P C 2 /A 1 0 3 5 P C 1 /A 9 3 6 P C 0 /A 8 3 7 P D 7 /T 0 3 8 P G 2 /A L E 3 9 P G 1 /R D 4 0 P G 0 /W R 4 1 P L 7 4 2 P L 6 4 3 P L 5 /O C 5 C 4 4 P L 4 /O C 5 B 4 5 P L 3 /O C 5 A 4 6 P L 2 /T 5 4 7 P L 1 /I C P 5 4 8 P L 0 /I C P 4 4 9 P B 3 /M IS O /P C IN T 3 5 0 P B 2 /M O S I/ P C IN T 2 5 1 P B 1 /S C K /P C IN T 1 5 2 P B 0 /S S /P C IN T 0 5 3 PK7/ADC15/PCINT23 A15 PK6/ADC14/PCINT22 A14 PK5/ADC13/PCINT21 A13 PK4/ADC12/PCINT20 A12 PK3/ADC11/PCINT19 A11 PK2/ADC10/PCINT18 A10 PK1/ADC9/PCINT17 A9 PK0/ADC8/PCINT16 A8 PF7/ADC7/TDI A7 PF6/ADC6/TDO A6 PF5/ADC5/TMS A5 PF4/ADC4/TCK A4 PF3/ADC3 A3 PF2/ADC2 A2 PF1/ADC1 A1 PF0/ADC0 A0 RESET P C 7 /A 1 5 3 0 ARD1 ARDUINO MEGA2560 R3 VBAT 3 X1 1 X2 2 SCL 6 SDA 5 SOUT 7 U1 DS1307 X1 32,768Khz BATTERAY 3V
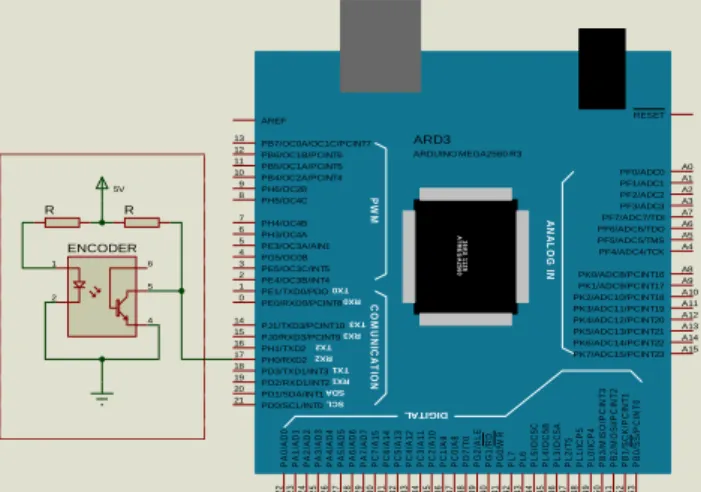
40 3.3.3. Perancangan Waterflow sensor
Pada sistem pengukur aliran air menggunakan sensor rotari enkoder yang dihubungkan langsung dengan mekanik degan menggunakan induksi magnet pada baling – baling kemudian mengerakkan optocoupler didalamnya. seperti pada gambar 3.12 berikut :
Gambar 3.12 Mekanik sistem sensor waterflow
Prinsip kerja dari mekanik ini adalah aliran air akan memutar blade (fan) yang terhubung ke magnet permanent sehingga putaran baling baling sensor rotari encoder. Putaran rotari enkoder tersebut menghasilkan pulsa yang kemudian akan
dicounter menggunakan mikrokontroller pada arduino. Rotary enkoder yang
digunakan pada rancang bangun ini dari jenis incremental dengan resolusi 16 pulsa setiap satu kali putaran penuh. Dan dibangun menggunakan rangkaian optocoupler dan piringan hole disk sebagai penghasil pulsa. Output dari encoder selanjutnya dihubungkan ke arduino sebagaimana ditunjukkan pada gambar 3.13:
Gambar 3.13 Rangkaian sensor aliran air
P W M C O M U N IC A T IO N DIG IT AL A N A L O G IN A T M E G A 25 6 0 1 6A U 11 2 6 TX 0 TX 3 TX2 TX 1 SD A SC L RX 0 RX 3 RX2 RX 1 PD0/SCL/INT0 21 PD1/SDA/INT1 20 PD2/RXD1/INT2 19 PD3/TXD1/INT3 18 PH0/RXD2 17 PH1/TXD2 16 PJ0/RXD3/PCINT9 15 PJ1/TXD3/PCINT10 14 PE0/RXD0/PCINT8 0 PE1/TXD0/PDO 1 PE4/OC3B/INT4 2 PE5/OC3C/INT5 3 PG5/OC0B 4 PE3/OC3A/AIN1 5 PH3/OC4A 6 PH4/OC4B 7 PH5/OC4C 8 PH6/OC2B 9 PB4/OC2A/PCINT4 10 PB5/OC1A/PCINT5 11 PB6/OC1B/PCINT6 12 PB7/OC0A/OC1C/PCINT7 13 AREF P A 0 /A D 0 2 2 P A 1 /A D 1 2 3 P A 2 /A D 2 2 4 P A 3 /A D 3 2 5 P A 4 /A D 4 2 6 P A 5 /A D 5 2 7 P A 6 /A D 6 2 8 P A 7 /A D 7 2 9 P C 6 /A 1 4 3 1 P C 5 /A 1 3 3 2 P C 4 /A 1 2 3 3 P C 3 /A 1 1 3 4 P C 2 /A 1 0 3 5 P C 1 /A 9 3 6 P C 0 /A 8 3 7 P D 7 /T 0 3 8 P G 2 /A L E 3 9 P G 1 /R D 4 0 P G 0 /W R 4 1 P L 7 4 2 P L 6 4 3 P L 5 /O C 5 C 4 4 P L 4 /O C 5 B 4 5 P L 3 /O C 5 A 4 6 P L 2 /T 5 4 7 P L 1 /I C P 5 4 8 P L 0 /I C P 4 4 9 P B 3 /M IS O /P C IN T 3 5 0 P B 2 /M O S I/ P C IN T 2 5 1 P B 1 /S C K /P C IN T 1 5 2 P B 0 /S S /P C IN T 0 5 3 PK7/ADC15/PCINT23 A15 PK6/ADC14/PCINT22 A14 PK5/ADC13/PCINT21 A13 PK4/ADC12/PCINT20 A12 PK3/ADC11/PCINT19 A11 PK2/ADC10/PCINT18PK1/ADC9/PCINT17 A10 A9 PK0/ADC8/PCINT16 A8 PF7/ADC7/TDI A7 PF6/ADC6/TDO A6 PF5/ADC5/TMS A5 PF4/ADC4/TCK A4 PF3/ADC3 A3 PF2/ADC2 A2 PF1/ADC1 A1 PF0/ADC0 A0 RESET P C 7 /A 1 5 3 0 ARD3 ARDUINO MEGA2560 R3 6 5 4 1 2 ENCODER R R 5V
41 Keterangan :
Working Voltage :5V-24V
Maximum Current :15 mA (DC 5V)
Weinght :43 g
Flow Rate Range :0.5 ~ 60 L/min
Operating Temperatur :00C – 800C
Operating Humidity :35% ~ 90% RH
Operating Pressure :under 1,75 Mpa
Store Temperatur :-250C~+800C
Store Humidity :25%~90% RH
3.3.4 Perancangan rangkaian sensor ph
Untuk membaca keasaman dan basa yang terkandung pada air, maka diperlukan sensor Ph. Pada perancangan ini sensor Ph digunakan untuk membaca kualitas air dimana modul yang digunakan adalah sensor pH type DFROBOT SEN0161. Bentuk keluaran sensor Ph adalah tegangan analog sehingga output
pada modul dapat dibaca menggunakan input ADC (Analog) pada minimum sistem arduino. Adapun perancangan rangkaian arduino pada modul Ph ditunjukkan pada gambar 3.14:
Gambar 3.14 Rangkaian Modul Ph DFROBOT SEN0161
3.3.5 Perancangan rangkaian sensor Electro Conductivity (EC)
Untuk membaca kepekatan pupuk atau laruan nutrisi yang terkandung pada air tanaman hidroponix, maka diperlukan sensor EC. Sensor EC
MODUL PHmeter BNC Vcc Vout GND 5V Probe PH DFROBOT SEN0161 P W M C O M U N IC A T IO N DIGITAL A N A L O G IN A TM EG A 2 560 16 A U 112 6 TX0 TX3 TX2 TX1 SDA SCL RX0 RX3 RX2 RX1 PD0/SCL/INT0 21 PD1/SDA/INT1 20 PD2/RXD1/INT2PD3/TXD1/INT3 19 18 PH0/RXD2 17 PH1/TXD2 16 PJ0/RXD3/PCINT9 15 PJ1/TXD3/PCINT10 14 PE0/RXD0/PCINT8PE1/TXD0/PDO 0 1 PE4/OC3B/INT4 2 PE5/OC3C/INT5 3 PG5/OC0B 4 PE3/OC3A/AIN1PH3/OC4A 5 6 PH4/OC4B 7 PH5/OC4CPH6/OC2B 8 9 PB4/OC2A/PCINT4 10 PB5/OC1A/PCINT5 11 PB6/OC1B/PCINT6 12 PB7/OC0A/OC1C/PCINT7 13 AREF P A 0 /A D 0 2 2 P A 1 /A D 1 2 3 P A 2 /A D 2 2 4 P A 3 /A D 3 2 5 P A 4 /A D 4 2 6 P A 5 /A D 5 2 7 P A 6 /A D 6 2 8 P A 7 /A D 7 2 9 P C 6 /A 1 4 3 1 P C 5 /A 1 3 3 2 P C 4 /A 1 2 3 3 P C 3 /A 1 1 3 4 P C 2 /A 1 0 3 5 P C 1 /A 9 3 6 P C 0 /A 8 3 7 P D 7 /T 0 3 8 P G 2 /A L E 3 9 P G 1 /R D 4 0 P G 0 /W R 4 1 P L 7 4 2 P L 6 4 3 P L 5 /O C 5 C 4 4 P L 4 /O C 5 B 4 5 P L 3 /O C 5 A 4 6 P L 2 /T 5 4 7 P L 1 /I C P 5 4 8 P L 0 /I C P 4 4 9 P B 3 /M IS O /P C IN T 3 5 0 P B 2 /M O S I/ P C IN T 2 5 1 P B 1 /S C K /P C IN T 1 5 2 P B 0 /S S /P C IN T 0 5 3 PK7/ADC15/PCINT23 A15 PK6/ADC14/PCINT22 A14 PK5/ADC13/PCINT21 A13 PK4/ADC12/PCINT20 A12 PK3/ADC11/PCINT19 A11 PK2/ADC10/PCINT18 A10A9 PK1/ADC9/PCINT17PK0/ADC8/PCINT16
A8 PF7/ADC7/TDI A7 PF6/ADC6/TDO A6 PF5/ADC5/TMS A5 PF4/ADC4/TCK A4 PF3/ADC3 A3 PF2/ADC2 A2 PF1/ADC1 A1 PF0/ADC0 A0 RESET P C 7 /A 1 5 3 0 ARDUINO ARDUINO MEGA2560 R3
42 menggunakan satuan mmhos/cm atau satuan daya penghantar listrik. Pada perancangan ini sensor EC digunakan sensor EC type DFROBOT DFR00300. Bentuk keluaran sensor EC adalah tegangan analog sehingga output pada modul dapat dibaca menggunakan input ADC (Analog) pada minimum sistem arduino. Adapun perancangan rangkaian arduino pada modul EC ditunjukkan pada gambar 3.15:
Gambar 3.15 Rangkaian Modul Electro Conductivity (EC)
3.3.6 Perancangan rangkaian Driver Injector
Pada perancangan ini Injector dirancang mengunakan injector sepda motor matic honda beat FI 110 dan mempunyai tegangan suplay sebesar 12VDC, sementara itu tegangan sistem ARDUINO yang bertindak sebagai pengendali
injector adalah 5V, maka untuk mengontrol injector diperlukan rangkaian driver
yang pada rancangan ini menggunakan perantara Optocoupler sebagai pemisah beda tegangan antara rangkaian driver injector dan minimum sistem Arduino. Pada perencanaan driver injector dari alat yang akan dirancang, injector yang digunakan mempunyai resistansi coil sekitar 50Ω dan membutuhkan catu daya
sebesar 12volt DC, dengan demikian, maka arus yang diperlukan injector adalah :
I = Buzzer Rcoil VCC _ = 50 12 = 0,24 Amper.
Sementara itu perancangan rangkaian driver injector ditunjukkan dalam Gambar 3.16 MODUL EC meter BNC Vcc Vout GND 5V Probe EC DFROBOT DFR00300 P W M C O M U N IC A T IO N DIGITAL A N A L O G IN A T M EG A2 56 0 1 6A U 1 1 26 TX0 TX3 TX2 TX1 SDA SCL RX0 RX3 RX2 RX1 PD0/SCL/INT0 21 PD1/SDA/INT1 20 PD2/RXD1/INT2 19 PD3/TXD1/INT3 18 PH0/RXD2 17 PH1/TXD2 16 PJ0/RXD3/PCINT9 15 PJ1/TXD3/PCINT10 14 PE0/RXD0/PCINT8PE1/TXD0/PDO 0 1 PE4/OC3B/INT4 2 PE5/OC3C/INT5PG5/OC0B 3 4 PE3/OC3A/AIN1PH3/OC4A 5 6 PH4/OC4B 7 PH5/OC4C 8 PH6/OC2B 9 PB4/OC2A/PCINT4 10 PB5/OC1A/PCINT5 11 PB6/OC1B/PCINT6 12 PB7/OC0A/OC1C/PCINT7 13 AREF P A 0 /A D 0 2 2 P A 1 /A D 1 2 3 P A 2 /A D 2 2 4 P A 3 /A D 3 2 5 P A 4 /A D 4 2 6 P A 5 /A D 5 2 7 P A 6 /A D 6 2 8 P A 7 /A D 7 2 9 P C 6 /A 1 4 3 1 P C 5 /A 1 3 3 2 P C 4 /A 1 2 3 3 P C 3 /A 1 1 3 4 P C 2 /A 1 0 3 5 P C 1 /A 9 3 6 P C 0 /A 8 3 7 P D 7 /T 0 3 8 P G 2 /A L E 3 9 P G 1 /R D 4 0 P G 0 /W R 4 1 P L 7 4 2 P L 6 4 3 P L 5 /O C 5 C 4 4 P L 4 /O C 5 B 4 5 P L 3 /O C 5 A 4 6 P L 2 /T 5 4 7 P L 1 /I C P 5 4 8 P L 0 /I C P 4 4 9 P B 3 /M IS O /P C IN T 3 5 0 P B 2 /M O S I/ P C IN T 2 5 1 P B 1 /S C K /P C IN T 1 5 2 P B 0 /S S /P C IN T 0 5 3 PK7/ADC15/PCINT23 A15 PK6/ADC14/PCINT22 A14 PK5/ADC13/PCINT21 A13 PK4/ADC12/PCINT20 A12 PK3/ADC11/PCINT19 A11 PK2/ADC10/PCINT18 A10 PK1/ADC9/PCINT17 A9 PK0/ADC8/PCINT16 A8 PF7/ADC7/TDI A7 PF6/ADC6/TDO A6 PF5/ADC5/TMS A5 PF4/ADC4/TCK A4 PF3/ADC3 A3 PF2/ADC2 A2 PF1/ADC1 A1 PF0/ADC0 A0 RESET P C 7 /A 1 5 3 0 ARDUINO ARDUINO MEGA2560 R3
43 Gambar 3.16 Rangkaian Driver Injector
Alasan pengunaan IC optocoupler ini adalah untuk pengisolasian rangkaian kontrol dengan beban supaya tidak terjadi gangguan pada saat sistem bekerja. Dalam rangkaian ini juga terdapat dioda yang berfungsi untuk melewatkan arus balik coil Injector pada saat perubahan kondisi dari keadaan ON ke OFF supaya tidak merusak transistor (2N2222A). Dioda yang digunakan sebaiknya yang mempunyai kemampuan melewatkan arus lebih besar dari besarnya arus balik
coil injector yang akan melewatinya.
Transistor yang digunakan sebagai driver dipilih dengan pertimbangan arus
collector maksimum yang besarnya 3 kali. Dengan kebutuhan arus tersebut maka
dipilih transistor type 2N2222A sebagai driver. Dari datasheet diketahui bahwa transistor tipe 2N2222A memiliki arus kolektor sebesar 800mA. Dalam perencanaannya kedua transistor (2N2222A) didarlington untuk penguatan yang besar yakni perkalian dari penguatan kedua transistor tersebut .
Ditetapkan drop tegangan pada Vce_opto = 1V (saturation).
Maka R2 atau RB dapat dicari dengan rumus:
Rb= b be opto ce cc I V V V ( )2* Dimana Ib= Ic_opto
untuk Ic dapat dicari dengan menetapkan berapa Ib / β dari tiap- tiap transistor.
Ic= Ib. (β1. β2)
Sedangkan Iint dapat dicari dengan :
Iint=
int R Vcc
Untuk semua perencanaannya dapat dilihat sebagai berikut: R1 180 6 5 4 1 2 OPTOCOUPLER 4N35 D1 1N4001 R2 27k Q1 2N2222A Q2 2N2222A 12V PWM COMUNICATION D IG IT A L ANALOG IN ATMEGA2560 16AU 1126 T X 0 T X 3 T X 2 T X 1 S D A S C L R X 0 R X 3 R X 2 R X 1 P D 0 /S C L /I N T 0 2 1 P D 1 /S D A /I N T 1 2 0 P D 2 /R X D 1 /I N T 2 1 9 P D 3 /T X D 1 /I N T 3 1 8 P H 0 /R X D 2 1 7 P H 1 /T X D 2 1 6 P J 0 /R X D 3 /P C IN T 9 1 5 P J 1 /T X D 3 /P C IN T 1 0 1 4 P E 0 /R X D 0 /P C IN T 8 0 P E 1 /T X D 0 /P D O 1 P E 4 /O C 3 B /I N T 4 2 P E 5 /O C 3 C /I N T 5 3 P G 5 /O C 0 B 4 P E 3 /O C 3 A /A IN 1 5 P H 3 /O C 4 A 6 P H 4 /O C 4 B 7 P H 5 /O C 4 C 8 P H 6 /O C 2 B 9 P B 4 /O C 2 A /P C IN T 4 1 0 P B 5 /O C 1 A /P C IN T 5 1 1 P B 6 /O C 1 B /P C IN T 6 1 2 P B 7 /O C 0 A /O C 1 C /P C IN T 7 1 3 A R E F PA0/AD0 22 PA1/AD1 23 PA2/AD2 24 PA3/AD3 25 PA4/AD4 26 PA5/AD5 27 PA6/AD6 28 PA7/AD7 29 PC6/A14 31 PC5/A13 32 PC4/A12 33 PC3/A11 34 PC2/A10 35 PC1/A9 36 PC0/A8 37 PD7/T0 38 PG2/ALE 39 PG1/RD 40 PG0/WR 41 PL7 42 PL6 43 PL5/OC5C 44 PL4/OC5B 45 PL3/OC5A 46 PL2/T5 47 PL1/ICP5 48 PL0/ICP4 49 PB3/MISO/PCINT3 50 PB2/MOSI/PCINT2 51 PB1/SCK/PCINT1 52 PB0/SS/PCINT0 53 P K 7 /A D C 1 5 /P C IN T 2 3 A 1 5 P K 6 /A D C 1 4 /P C IN T 2 2 A 1 4 P K 5 /A D C 1 3 /P C IN T 2 1 A 1 3 P K 4 /A D C 1 2 /P C IN T 2 0 A 1 2 P K 3 /A D C 1 1 /P C IN T 1 9 A 1 1 P K 2 /A D C 1 0 /P C IN T 1 8 A 1 0 P K 1 /A D C 9 /P C IN T 1 7 A 9 P K 0 /A D C 8 /P C IN T 1 6 A 8 P F 7 /A D C 7 /T D I A 7 P F 6 /A D C 6 /T D O A 6 P F 5 /A D C 5 /T M S A 5 P F 4 /A D C 4 /T C K A 4 P F 3 /A D C 3 A 3 P F 2 /A D C 2 A 2 P F 1 /A D C 1 A 1 P F 0 /A D C 0 A 0 R E S E T PC7/A15 30 ARD3 ARDUINO MEGA2560 R3 INJ Injector Ke driver Injector 2 Ke driver Injector 3 Ke driver Injector 4 Driver Injector 1
44 Dalam pengukuran diketahui Rint= 50 Ω
Maka: Iint= 50 12V = 0,24 A= 240mA
Maka kita harus mencari transistor yang mempunyai Ic lebih besar dari Iint. Untuk itu dipilih transistor 2N222 yang memiliki Ic = 800mA.
Karena Ib_TR2 = Ic_TR1, Maka: Ic TR1= TR2 Ic = 50 800mA = 0,016A Ib TR1 = TR1 Ic = 50 016 , 0 A = 0,00032A
Dengan demikian nilai Rb dapat ditentukan dengan rumus:
Rb = 1 ) ( 2 TR opto ce Ib Vbe V Vcc = A V 00032 , 0 ) 3 , 1 * 2 3 , 0 12 ( = A V 00032 , 0 1 , 9 = 28437 Ω ≈ 27KΩ (harga R dipasaran)
Untuk nilai R1 dapat dicari dengan rumus:
R1 = LED LED oh I V V
45
VOH = 4,2V (untuk kondisi IOH = 20mA pada tegangan 5V) dan ILED sebesar 16mA
Maka R1 = mA V 16 ) 5 , 1 2 , 4 ( = 168. 75Ω ≈ 180Ω
sehingga didapat nilai R1 = 180Ω (dipasaran).
3.3.7 Perancangan Driver TRIAC
Rangkaian TRIAC merupakan driver yang terdiri dari gabungan 2 buah SCR dan digunakan untuk mengontrol beban AC serta proses pensaklarannya bebas dari unsur mekanik sebagaimana relay yang menggunakan coil untuk menarik kontak. Karena tanpa unsur mekanik, maka beban yang ditangani dapat
diswitcing dalam kecepatan tertentu. Untuk mengaktifkan TRIAC, maka pin Opto
TRIAC diberikan picuan. Adapun perancangan driver TRIAC dengan mengacu
typical application datasheet ditunjukkan pada Gambar 3.17.
Gambar 3.17 Rangkaian Driver TRIAC
Rangkaian Driver TRIAC menggunakan OptoDiac MOC 3021, nilai resistansi 330 ohm pada rangkaian diatas ditentukan berdasarkan lembar datasheet
MOC3021 untuk penangan beban resistive (RL) yang ditangani TRIAC 1 2 6 4 OPTOTRIAC MOC3021 TRIAC Q4004L4 R1 10k R_IN 220 5V
MOTOR POMPA AIR 220V AC PWM COMUNICATION D IG IT A L ANALOG IN ATMEGA2560 16AU 1126 T X 0 T X 3 T X 2 T X 1 S D A S C L R X 0 R X 3 R X 2 R X 1 P D 0 /S C L /I N T 0 2 1 P D 1 /S D A /I N T 1 2 0 P D 2 /R X D 1 /I N T 2 1 9 P D 3 /T X D 1 /I N T 3 1 8 P H 0 /R X D 2 1 7 P H 1 /T X D 2 1 6 P J 0 /R X D 3 /P C IN T 9 1 5 P J 1 /T X D 3 /P C IN T 1 0 1 4 P E 0 /R X D 0 /P C IN T 8 0 P E 1 /T X D 0 /P D O 1 P E 4 /O C 3 B /I N T 4 2 P E 5 /O C 3 C /I N T 5 3 P G 5 /O C 0 B 4 P E 3 /O C 3 A /A IN 1 5 P H 3 /O C 4 A 6 P H 4 /O C 4 B 7 P H 5 /O C 4 C 8 P H 6 /O C 2 B 9 P B 4 /O C 2 A /P C IN T 4 1 0 P B 5 /O C 1 A /P C IN T 5 1 1 P B 6 /O C 1 B /P C IN T 6 1 2 P B 7 /O C 0 A /O C 1 C /P C IN T 7 1 3 A R E F PA0/AD0 22 PA1/AD1 23 PA2/AD2 24 PA3/AD3 25 PA4/AD4 26 PA5/AD5 27 PA6/AD6 28 PA7/AD7 29 PC6/A14 31 PC5/A13 32 PC4/A12 33 PC3/A11 34 PC2/A10 35 PC1/A9 36 PC0/A8 37 PD7/T0 38 PG2/ALE 39 PG1/RD 40 PG0/WR 41 PL7 42 PL6 43 PL5/OC5C 44 PL4/OC5B 45 PL3/OC5A 46 PL2/T5 47 PL1/ICP5 48 PL0/ICP4 49 PB3/MISO/PCINT3 50 PB2/MOSI/PCINT2 51 PB1/SCK/PCINT1 52 PB0/SS/PCINT0 53 P K 7 /A D C 1 5 /P C IN T 2 3 A 1 5 P K 6 /A D C 1 4 /P C IN T 2 2 A 1 4 P K 5 /A D C 1 3 /P C IN T 2 1 A 1 3 P K 4 /A D C 1 2 /P C IN T 2 0 A 1 2 P K 3 /A D C 1 1 /P C IN T 1 9 A 1 1 P K 2 /A D C 1 0 /P C IN T 1 8 A 1 0 P K 1 /A D C 9 /P C IN T 1 7 A 9 P K 0 /A D C 8 /P C IN T 1 6 A 8 P F 7 /A D C 7 /T D I A 7 P F 6 /A D C 6 /T D O A 6 P F 5 /A D C 5 /T M S A 5 P F 4 /A D C 4 /T C K A 4 P F 3 /A D C 3 A 3 P F 2 /A D C 2 A 2 P F 1 /A D C 1 A 1 P F 0 /A D C 0 A 0 R E S E T PC7/A15 30 ARD1 ARDUINO MEGA2560 R3
46 sebagaimana pada alat ini, sementara untuk mencari nilai resistansi input (Rin)
dapat dihitung sebagai berikut: Diketahui:
ILED : 15 mA (datasheet)
VLED : 1,2 Volt (datasheet)
VOL_ATMEGA : 0,7 (tegangan output saat low ARDUINO/datasheet)
Vcc : 5 volt
Maka besarnya Rin dapat ditentukan sebagaimana berikut:
Rin = I_led_opto V -V -Vcc LED OL_ATMEGA16 = mA 15 7 , 0 2 , 1 5 = 015 . 0 1 . 3 =206Ω ≈ 220Ω
Sementara itu karena input anode dihubungkan ke vcc, maka proses penyalaan driver triac akan aktif saat input dari mikro (logika low / 0), sehingga arus ac akan mengalir melalui triac menuju pompa saat input optotriac berlogika 0 dan akan off saat input berlogika high (1/ 5V).