EVALUASI DESAIN DAN STABILITAS KAPAL
PENANGKAP IKAN DI PALABUHANRATU
(STUDI KASUS KAPAL PSP 01)
ADI SUSANTO
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI TESIS DAN SUMBER INFORMASI
Dengan ini saya menyatakan bahwa tesis Evaluasi Desain dan Stabilitas Kapal Penangkap Ikan di Palabuhanratu (Studi Kasus Kapal PSP 01) adalah karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apapun kepada perguruan tinggi manapun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.
Bogor, Mei 2010
ABSTRACT
ADI SUSANTO. Fishing Vessel Design and Stability Evaluation in Palabuhanratu (Case Study PSP 01 Fishing Vessel). Supervised by BUDHI HASCARYO ISKANDAR and MOHAMMAD IMRON.
PSP 01 fishing vessel is a research and fishing vessel that built in the traditional dock, so it does not have design drawings and stability calculation. Therefore, this study aims to determine the vessel’s suitability of design and stability condition followed by redesign the main dimension to obtain more optimal design. Simulation carried out in various load conditions and different vessel sizes to get the ideal size of the vessel. The main dimension ratio and coefficient of fineness analysis showed that PSP 01 fishing vessel has been appropriate as multipurpose vessel for fishing activities. Stability condition of the ship either empty or in existing load condition meets the standards recommended by IMO with a maximum GZ of 0.33 m and an initial GM's 0.64 m. To improve the stability and fish hold capacity, the breadth and depth needs to be increased. The redesign results an alternative measure for main dimension of vessel similar to LOA = 14.30 m; B = 5.14 m; D = 2.12 m.
RINGKASAN
ADI SUSANTO. Evaluasi Desain dan Stabilitas Kapal Penangkap Ikan di Palabuhanratu (Studi Kasus Kapal PSP 01). Di bimbing oleh BUDHI HASCARYO ISKANDAR dan MOHAMMAD IMRON.
Menurut Nomura dan Yamazaki (1977), kapal perikanan didefinisikan sebagai kapal yang digunakan dalam aktivitas perikanan meliputi aktivitas penangkapan atau mengumpulkan sumberdaya perikanan (fisheries resources), mengelola usaha budidaya, dan digunakan dalam beberapa aktivitas seperti riset, training serta inspeksi sumberdaya perairan. Fungsinya yang begitu penting mengharuskan kapal perikanan memiliki kesesuaian desain dan kualitas stabilitas yang baik. Hal ini untuk mendukung kesuksesan dalam operasi penangkapan ikan. Seperti dikemukakan oleh Nomura dan Yamazaki (1977), persyaratan kapal untuk mencapai kesuksesan dalam operasi penangkapan (general requirement) antara lain memiliki kekuatan struktur badan kapal yang baik, mempunyai stabilitas yang tinggi dan memiliki fasilitas penyimpanan yang lengkap.
Tujuan dari penelitian ini adalah pertama, mengkaji kesesuaian desain kapal PSP 01 dilihat dari rasio dimensi utama dan parameter hidrostatis kapal, kedua mengkaji kualitas stabilitas Kapal PSP 01 dalam berbagai distribusi muatan dan ketiga mengkaji ulang desain (redesign) kapal PSP 01 berdasarkan hasil analisis yang telah diperoleh. Penelitian dilakukan dengan metode studi kasus dan simulasi numerik. Kasus yang diteliti adalah kesesuaian desain dan stabilitas Kapal Penangkap Ikan PSP 01 dalam berbagai kondisi muatan, sedangkan simulasi numerik dilakukan untuk mengevaluasi desain dan stabilitas kapal sehingga didapatkan ukuran kapal baru yang sesuai sebagai kapal static gear untuk pembangunan kapal dimasa mendatang.
Hasil analisis terhadap rasio dimensi utama Kapal PSP 01 menunjukkan bahwa kapal tersebut telah sesuai sebagai kapal static gear dengan nilai acuan hasil penelitian yang dilakukan oleh Iskandar dan Pujiati (1995). Nilai L/B yang mendekati batas bawah nilai acuan menunjukkan bahwa tahanan gerak yang dialami oleh kapal relatif besar. Sementara bila dilihat dari nilai coefficient of fineness, Kapal PSP 01 juga sudah sesuai sebagai kapal static gear yang
digunakan untuk mengoperasikan lebih dari satu alat tangkap (Darmawan et al. 1999). Meskipun demikian, menurut Utama et al. (2007) nilai Cb yang masih berada pada kisaran 0,5 menunjukkan bahwa bentuk badan kapal merupakan peralihan antara bentuk langsing (chine) ke bentuk gemuk (rounded) sehingga menyebabkan kapal mudah mengalami oleng dan menyebabkan ketidaknyamanan bagi ABK.
galangan modern. Hal ini tidak terlepas dari pengetahuan turun-temurun dan pengalaman yang dimiliki oleh pengrajin kapal.
Perhitungan stabilitas terhadap kondisi muatan eksisting memberikan informasi bahwa dari 4 kondisi yang disimulasikan, distribusi muatan pada kondisi 4 merupakan kondisi saat kapal memiliki stabilitas paling baik. Hal ini tidak terlepas dari posisi VCG yang berada lebih rendah dari kondisi yang lain. Pada sudut oleng < 50º nilai GZ untuk kondisi 1-3 relatif sama, namun kondisi 4 memiliki nilai GZ yang lebih besar. Fenomena menarik terjadi pada sudut oleng > 50º dimana nilai GZ untuk kondisi 1 mengalami penurunan bila dibandingkan dengan kondisi 2 dan 3. Hal ini disebabkan oleh nilai VCG pada kondisi 1 lebih besar dari kondisi 2 dan 3 yang relatif sama. Sementara itu, nilai VCG pada kondisi 4 jauh lebih rendah dari kondisi yang lain sehingga memiliki stabilitas yang lebih baik.
Meskipun Kapal PSP 01 telah memiliki stabilitas yang cukup baik, namun karena bentuk badan kapalnya yang cenderung ramping menyebabkan kapal ini memiliki periode oleng yang cepat. Hal ini tidak terlepas dari ukuran lebar yang tidak sesuai dengan ukuran panjangnya. Oleh kerena itu, untuk pembuatan kapal sejenis dimasa mendatang maka sebaiknya ukuran lebar kapal diperbesar pada ukuran panjang yang relatif sama. Selain penambahan ukuran lebar, ukuran dalam kapal juga harus diperbesar. Peningkatan ukuran lebar dan dalam tersebut dapat meningkatkan kondisi stabilitas, kapasitas muatan dan memperlambat periode oleng kapal. Kapal yang memiliki periode oleng lebih lambat akan memberikan kenyamanan yang lebih baik bagi ABK.
Berdasarkan jenis alat tangkap yang dioperasikan yaitu gillnet, jodang dan tuna longline, Kapal PSP 01 termasuk kapal yang mengoperasikan alat tangkap yang bersifat statis. Artinya, metode pengoperasian alat tangkap yang digunakan lebih cenderung diam. Hal ini menyebabkan posisi kapal lebih dominan dalam kondisi diam sehingga dibutuhkan stabilitas yang baik. Oleh karena itu, berdasarkan hasil analisis terhadap dimensi utama kapal maka perlu dilakukan redesign untuk kesempurnaan pembuatan kapal sejenis dimasa mendatang. Pemilihan ukuran desain yang optimal berdasarkan pada beberapa pertimbangan yaitu rasio dimensi utama, kondisi stabilitas, nilai LCB dan periode oleng. Hasil simulasi terhadap panjang (LOA) yang sama dengan mempertimbangkan 4 faktor
tersebut menghasilkan beberapa alternatif dimensi utama dan yang terbaik adalah kapal dengan ukuran LOA = 14,30 m ; B = 5,14 m dan D = 2,12 m.
© Hak Cipta milik IPB, tahun 2010 Hak Cipta dilindungi Undang-Undang
Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik atau tinjauan suatu masalah; dan pengutipan tersebut tidak merugikan kepentingan yang wajar IPB.
EVALUASI DESAIN DAN STABILITAS KAPAL
PENANGKAP IKAN DI PALABUHANRATU
(STUDI KASUS KAPAL PSP 01)
ADI SUSANTO
Tesis
sebagai salah satu syarat untuk memperoleh gelar Magister Sains pada
Program Studi Teknologi Perikanan Tangkap
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
Judul Tesis
Nama NIM
: Evaluasi Desain dan Stabilitas Kapal Penangkap Ikan di Palabuhanratu (Studi Kasus Kapal PSP 01)
: Adi Susanto : C451080011
Disetujui Komisi Pembimbing
Ketua
Dr. Ir. Budhi Hascaryo Iskandar, M.Si
Diketahui
Anggota
Dr. Ir. Mohammad Imron, M.Si
Ketua Program Studi
Teknologi Perikanan Tangkap
Dr. Ir. M. Fedi A. Sondita, M.Sc
Tanggal Ujian: 17 Maret 2010
Dekan Sekolah Pascasarjana
Prof. Dr. Ir. Khairil A. Notodiputro, M.S
PRAKATA
Puji dan syukur penulis panjatkan kehadirat Allah SWT karena dengan limpahan rahmat dan karunia-Nyalah penulis dapat menyelesaikan penulisan Tesis dengan judul “Evaluasi Desain dan Stabilitas Kapal Penangkap Ikan di
Palabuhanratu (Studi Kasus Kapal PSP 01)”. Hasil penelitian ini diharapkan
dapat memperkaya khasanah ilmu pengetahuan tentang kapal penangkap ikan khususnya dan tentunya dibidang perikanan.
Ucapan terima kasih penulis haturkan kepada Bapak Dr. Ir. Budhi Hascaryo Iskandar, M.Si dan Bapak Dr. Ir. Mohammad Imron, M.Si yang telah meluangkan waktu dan memberikan bimbingan, masukan serta arahan pada penulis dalam menyelesaikan tesis ini. Penulis juga mengucapkan terima kasih kepada Ibu Yopi Novita, S.Pi M.Si sebagai penguji luar komisi yang telah memberikan masukan bagi penyempurnaan tesis ini.
Penghargaan dan terima kasih yang tak terhingga penulis haturkan kepada Ayahanda, Ibunda, Kakak, Adik dan keluarga tercinta yang telah memberikan do’a, semangat, dukungan dan kasih sayang kepada penulis sehingga penulis mampu menyelesaikan penulisan tesis ini. Kepada teman-teman Program Studi TPT dan SPT dan seluruh pihak yang tidak dapat disebutkan satu persatu penulis mengucapkan terima kasih atas bantuan dan kerjasamanya.
Semoga hasil penelitian ini dapat dimanfaatkan dan berguna bagi siapa saja yang membutuhkan.
Bogor, Mei 2010
RIWAYAT HIDUP
Penulis lahir di Desa Betara Kanan Kecamatan Tungkal Ilir Kabupaten Tanjung Jabung Barat Provinsi Jambi pada tanggal 20 September 1983 dari pasangan Bapak Bakri dan Ibu Muhsonah. Penulis merupakan anak ke empat dari lima bersaudara.
Pada tahun 2002 penulis menyelesaikan pendidikan di SMU Negeri 1 Kuala Tungkal dan pada tahun yang sama diterima pada Program Studi Pemanfaatan Sumberdaya Perikanan Fakultas Perikanan dan Ilmu Kelautan Institut Pertanian Bogor melalui jalur Undangan Seleksi Masuk IPB (USMI). Penulis menyelesaikan pendidikan Sarjana pada tahun 2006 dan melanjutkan pendidikan ke jenjang Magister pada tahun 2008 pada Program Studi Teknologi Perikanan Tangkap.
Untuk menyelesaikan studi, penulis yang merupakan tenaga edukatif pada Bagian Kapal dan Transportasi Perikanan Departemen Pemanfaatan Sumberdaya Perikanan menulis tesis berjudul “Evaluasi Desain dan Stabilitas Kapal
DAFTAR ISTILAH
Desain
Galangan kapal
Gambar lines plan
IMO
Kapal multi purpose
Kapal perikanan
: Kerangka bentuk, rancangan, hasil akhir dari sebuah proses kreatif, baik itu berwujud sebuah rencana, proposal, atau berbentuk obyek nyata.
: Tempat di tepi laut atau perairan untuk membangun kapal dan mempunyai landasan untuk meluncurkan kapal yang dibuat di tempat tersebut.
: Gambar yang menunjukkan bentuk-bentuk penampang melintang dan penampang membujur badan kapal. : International Maritime Organization
: Kapal penangkap ikan yang mengoperasikan lebih dari satu alat tangkap
: Kapal, perahu, atau alat apung lain yang digunakan untuk melakukan penangkapan ikan, mendukung operasi penangkapan ikan, pembudidayaan ikan, pengangkutan ikan, pengolahan ikan, pelatihan perikanan, dan
penelitian/eksplorasi perikanan.
Kurva stabilitas statis : Kurva yang menunjukkan besarnya lengan stabilitas statis sebuah kapal pada sudut kemiringan mulai dari 0- 90 derajat, pada keadaan pemuatan tertentu.
Lengan stabilitas
: Jarak dari dua garis gaya tegak yakni gaya berat dan gaya benam (tekan air ke atas) dimana garis gaya yang satu melalui titik berat kapal dan arahnya ke bawah dan yang lain melalui titik benam dan arahnya ke atas, pada waktu kapal miring serta letak titik berat dan titik benam sedemikian rupa sehingga menghasilkan kopel penegak. Besarnya adalah hasil perkalian tinggi metasenter lintang dengan sinus sudut kemiringan kapal.
: Longitudinal centre buoyancy, jarak titik apung kapal secara longitudinal bila dihitung dari satu titik acuan (midship).
: Waktu dalam detik yang diperlukan oleh sebuah kapal untuk menyelesaikan satu gerakan rolling yakni dari sisi kiri ke sisi kanan dan kembali lagi ke sisi kiri.
: Kecenderungan kapal untuk kembali kepada kondisi tegak apabila dimiringkan dari posisi tersebut.
: Kecenderungan kapal untuk tetap berada dalam keadaan tegak atau kemampuan kapal untuk kembali pada keadaan tegak apabila miring (oleng) akibat gelombang, angin dan lain-lain.
DAFTAR ISI Latar Belakang ... Perumusan Masalah ... Tujuan Penelitian ... Manfaat Penelitian ... Kerangka Pendekatan Studi ... Hipotesis Penelitian ... 1 Dimensi Utama Kapal ... Parameter Hidrostatis ... Stabilitas Kapal ... 7 Titik-titik penting/utama ... Jenis keseimbangan ... 18 20 2.5 2.6 Kurva Stabilitas Statis (Kurva GZ) ... Stabilitas Dinamis ... 23 25 3 METODOLOGI ... 29
3.1 Waktu dan Tempat Penelitian ... 29
3.2 Peralatan Penelitian ... 30
4.2.2 General arrangement ... 47 Parameter Hidrostatis ... Coefficient of Fineness ... Stabilitas ... 4.5.1 Kondisi kapal kosong ... 4.5.2 Kondisi muatan eksisting ... Evaluasi Kesesuaian Desain ... 4.6.1 Kesesuaian panjang kapal ... 4.6.2 Kesesuaian lebar kapal ... 4.6.3 Kesesuaian dalam kapal ... 4.6.4 Perbaikan desain Kapal PSP 01 ... 51 5.2 Parameter Hidrostatis ... 5.3 Stabilitas ... 5.3.1 Kondisi kapal kosong ... 5.3.1 Kondisi muatan eksisting ... 5.4 Evaluasi Kesesuaian Desain ... 5.4.1 Kesesuaian panjang kapal ... 5.4.2 Kesesuaian lebar kapal ... 5.4.3 Kesesuaian dalam kapal ... 5.4.4 Perbaikan desain Kapal PSP 01 ... 5.5 Alternatif Nilai Rasio Dimensi Utama Kapal ... 75
DAFTAR TABEL
Halaman
1 2 3 4 5 6 7 8
9
Karakteristik kapal pada kondisi muatan yang disimulasikan ... 38
Nilai rasio dimensi utama kapal penangkap ikan di Indonesia ... 40
Nilai rasio dimensi utama kapal di beberapa tempat berbeda ... 41
Nilai coefficient of fineness kapal penangkap ikan di Indonesia ... 41
Nilai acuan coefficient of fineness kapal longline Jepang ... 42
Spesifikasi teknis Kapal PSP 01 ... 45
Rasio dimensi utama Kapal PSP 01 ... 50
Perbandingan rasio dimensi utama Kapal PSP 01 terhadap kapal static gear di Pantai Selatan Jawa Timur ... 51
Parameter hidrostatis Kapal PSP 01 ... 52
10 Coefficient of fineness Kapal PSP 01 ... 56
11 Kriteria stabilitas Kapal PSP 01 ... 58
12 Hasil analisis parameter stabilitas Kapal PSP 01 dengan muatan eksisting ... 59
13 Rasio dimensi utama Kapal PSP 01 hasil simulasi perubahan panjang kapal (LOA) ... 62
14 Rasio dimensi utama Kapal PSP 01 hasil simulasi perubahan lebar kapal (B) ... 64
15 Rasio dimensi utama Kapal PSP 01 hasil simulasi perubahan dalam kapal (D) ... 65
16 Kriteria stabilitas kapal hasil simulasi ... 67
17 Alternatif ukuran kapal PSP 01 berdasarkan nilai LCB, GZ dan periode oleng ... 69
18 Persentase perubahan luas area dibawah kurva GZ kapal hasil redesign terhadap Kapal PSP 01 ... 70
DAFTAR GAMBAR
Halaman
1 2 3 4 5 6 7 8 9
Kerangka pendekatan penelitian ... 6
Ukuran panjang total kapal (LOA) ... 9
Ukuran panjang garis tegak (LPP) ... 9
Panjang garis air (LWL) ... 10
Ilustrasi ukuran dimensi panjang kapal ... 10
Lebar kapal ... 11
Dalam kapal ... 11
Ilustrasi ukuran dimensi lebar kapal ... 12
Waterplan area (Aw) ... 14
10 Midship area (A) ... 14
11 Coefficient of block (Cb) ... 15
12 Coefficient of prismatic (Cp) dan Coefficient of vertical prismatic (Cvp).... 15
13 Coefficient of waterplan (Cw) ... 16
14 Coefficient of midship (C) ... 16
15 Jarak KB, BM, KM, KG, dan GM ... 17
16 Ilustrasi posisi titik berat (G) ... 19
17 Ilustrasi posisi titik apung (B) ... 19
18 Ilustrasi posisi titik metacentre (M) ... 20
19 Keseimbangan positif (stable equilibrium) ... 21
20 Keseimbangan negatif (unstable equilibrium) ... 21
21 Keseimbangan netral (neutral equilibrium) ... 22
22 Posisi keseimbangan ... 23
23 Kurva stabilitas statis (kurva GZ) ... 25
24 Ilustrasi perhitungan stabilitas dinamis ... 26
25 Prinsip perhitungan stabilitas dinamis dari kurva stabilitas statis ... 27
26 Peta lokasi penelitian ... 29
27 Kapal penangkap ikan PSP 01 ... 30
29 Kurva stabilitas statis ... 43
30 Peta lokasi penangkapan ikan Kapal PSP 01 ... 46
31 Lines plan Kapal PSP 01 ... 48
32 General arrangement Kapal PSP 01 ... 49
33 Kurva hidrostatis Kapal PSP 01 ... 53
34 Kurva stabilitas statis Kapal PSP 01 ... 58
35 Kurva stabilitas statis untuk 4 kondisi berbeda ... 60
36 Periode oleng hasil simulasi perubahan panjang kapal ... 63
37 Periode oleng hasil simulasi perubahan lebar kapal ... 64
38 Periode oleng hasil simulasi perubahan dalam kapal ... 66
39 Kurva stabilitas statis kapal hasil perubahan rasio dimensi utama ... 68
40 Hubungan persentase perubahan lebar (B) terhadap GZ maksimum dan periode oleng ... 72
1 PENDAHULUAN
1.1 Latar Belakang
Kapal PSP 01 merupakan kapal latih sekaligus kapal penangkap ikan yang dimiliki oleh Departemen Pemanfaatan Sumberdaya Perikanan (PSP), Fakultas Perikanan dan Ilmu Kelautan (FPIK) IPB. Sesuai dengan fungsinya, kapal tersebut diperuntukkan sebagai kapal latih bagi mahasiswa Departemen PSP pada khususnya dan mahasiswa FPIK pada umumnya. Selain sebagai kapal latih, Kapal PSP 01 juga digunakan untuk aktivitas penangkapan ikan. Alat tangkap yang dioperasikan di atas kapal tersebut adalah tuna longline, gillnet dan jodang.
Pada awal perencanaannya, kapal tersebut akan ditempatkan di Pelabuhan Perikanan Nusantara (PPN) Palabuhanratu, Kabupaten Sukabumi Jawa Barat dan awak kapalnya juga berasal dari wilayah Palabuhanratu. Hal ini dimaksudkan untuk mengoptimalkan pemanfaatan Kapal PSP 01 sebagai sarana penelitian (kapal latih) karena dekat dengan Stasiun Lapang Kelautan (SLK) yang dikelola oleh FPIK IPB. SLK yang berlokasi lebih kurang 1 km dari PPN Palabuhanratu tersebut merupakan salah satu pusat kegiatan praktek dan laboratorium lapang bagi mahasiswa dan civitas FPIK IPB.
Umumnya, kebiasaan nelayan Indonesia hanya mau menaiki dan mengoperasikan kapal yang dibuat oleh para pengrajin dimana mereka akan mengoperasikan kapal tersebut. Beberapa tahun yang lalu, pemerintah dalam hal ini adalah Departemen Kelautan dan Perikanan (DKP), memberikan bantuan berupa kapal penangkap ikan untuk nelayan di Palabuhanratu. Kapal-kapal tersebut tidak dibuat oleh pengrajin lokal di Palabuhanratu sehingga banyak yang tidak digunakan oleh nelayan. Berdasarkan pertimbangan tersebut, maka pembangunan Kapal PSP 01 yang nantinya akan dioperasikan oleh nelayan Palabuhanratu, dilakukan di galangan kapal tradisional di dalam wilayah PPN Palabuhanratu.
dan faktor kebiasaan pada pembangunan kapal sebelumnya. Dampaknya adalah terjadinya perubahan ukuran dimensi utama kapal dari yang telah ditetapkan di awal perencanaan dengan kapal yang telah dibangun. Perubahan ukuran kapal tersebut akan berpengaruh terhadap bentuk kapal sehingga menghasilkan karakteristik kapal yang berbeda dengan apa yang telah direncanakan.
Salah satu perubahan yang cukup signifikan adalah perubahan panjang kapal dari yang semula direncanakan yaitu 11,00 m menjadi 14,30 m. Perubahan panjang kapal tersebut mengakibatkan terjadinya perubahan bentuk badan kapal. Kapal menjadi lebih ramping dari rencana semula. Bila ditinjau dari faktor kecepatan, bentuk Kapal PSP 01 yang ramping akan mampu bergerak dengan kecepatan yang tinggi. Tetapi dari faktor kestabilan, badan kapal yang ramping mengakibatkan kapal mudah oleng sehingga kenyamanan ABK di atas kapal menjadi berkurang.
Sesuai dengan fungsi kapal pada awal perencanaannya sebagai kapal latih dan penangkap ikan yang mengoperasikan alat tangkap pasif (tuna longline dan gillnet), maka Kapal PSP 01 lebih mengutamakan kestabilan dibandingkan dengan kecepatan kapal. Namun perubahan ukuran kapal menyebabkan kapal yang dibangun memiliki karakteristik yang berbeda dengan perencanaan sebelumnya. Berdasarkan pemaparan tersebut, maka perlu dilakukan kajian ilmiah terhadap kesesuaian desain dan stabilitas Kapal PSP 01. Hasil evaluasi desain dan stabilitas tersebut diharapkan dapat digunakan untuk mengetahui kelayakan Kapal PSP 01. Apabila terdapat kelemahan dari hasil evaluasi, diharapkan melalui penelitian ini dapat memberikan alternatif/solusi untuk mereduksi kelemahan tersebut. Selain itu, hasil kajian desain ulang (redesign) Kapal PSP 01 dapat digunakan untuk memperoleh alternatif dimensi kapal yang lebih ideal, sehingga dapat menjadi acuan dalam pembuatan kapal sejenis dimasa mendatang.
1.2 Perumusan Masalah
tahanan gerak dan olah gerak kapal. Parameter hidrostatis digunakan untuk melihat keragaan teknis kapal pada batas muat tertentu, sedangkan stabilitas kapal sangat penting artinya bagi keselamatan dan kelaiklautan kapal. Parameter tersebut merupakan informasi penting terutama bagi kapten/nakhoda kapal
sehingga mampu membawa kapal berlayar dan melakukan operasi penangkapan ikan (OPI) dengan selamat.
Kapal yang dibangun di galangan modern sudah dilengkapi gambar rencana garis (lines plan), perhitungan hidrostatis dan perhitungan stabilitas sehingga desain dan stabilitas kapal akan sesuai dengan apa yang telah direncanakan. Namun pada galangan tradisional, proses pembuatan kapal dilakukan dengan mengandalkan keterampilan dan pengetahuan yang diperoleh secara turun- temurun dari generasi terdahulu. Begitu pula dengan Kapal penangkapan ikan PSP 01. Kapal tersebut dibangun tanpa dilengkapi dengan lines plan, perhitungan parameter hidrostatis dan perhitungan stabilitas sehingga kesesuaian desain dan kondisi kestabilan kapal belum diketahui. Selain itu, bentuk badan kapal yang ramping menyebabkan kapal mudah oleng dan menurunkan tingkat kenyamanan bagi ABK. Padahal selain berfungsi sebagai kapal penangkap ikan, Kapal PSP 01 juga digunakan sebagai sarana penelitian bagi staf pengajar dan mahasiswa. Oleh karena itu, faktor keselamatan dan kenyamanan diatas Kapal PSP 01 menjadi hal yang sangat penting untuk diketahui.
Bertitik tolak pada permasalahan tersebut, maka melalui penelitian ini akan dijawab beberapa pertanyaan terkait dengan desain, rasio dimensi utama,
parameter hidrostatis dan stabilitas Kapal PSP 01 antara lain :
1) Bagaimana kesesuaian desain Kapal PSP 01 apabila dilihat dari rasio dimensi utama (L/B, L/D dan B/D) dan parameter hidrostatis? 2) Bagaimana keragaan Kapal PSP 01 bila dilihat dari nilai parameter
hidrostatisnya?
3) Bagaimana kualitas stabilitas Kapal PSP 01?
4) Bagaimana kualitas stabilitas Kapal PSP 01 dalam berbagai distribusi muatan?
5) Bagaimana periode oleng Kapal PSP 01?
Informasi tentang kualitas stabilitas kapal sangat dibutuhkan oleh pengguna kapal, terutama bagi kapten/nakhoda kapal yang bertanggung jawab terhadap keselamatan baik ABK maupun kapal. Oleh karena itu, hasil penelitian ini diharapkan dapat menjadi sumber informasi yang berharga sehingga dapat memberikan manfaat bagi semua pihak dan berguna bagi pengembangan industri galangan kapal dimasa yang akan datang.
1.3 Tujuan Penelitian
Tujuan dari penelitian ini adalah :
1). Mengkaji kesesuaian desain Kapal PSP 01 dilihat dari rasio dimensi utama dan parameter hidrostatis kapal;
2). Mengkaji kualitas stabilitas Kapal PSP 01 dalam berbagai distribusi muatan;
3). Mengkaji ulang desain (redesign) Kapal PSP 01 berdasarkan hasil analisis yang telah diperoleh.
1.4 Manfaat Penelitian
Penelitian ini diharapkan dapat memberikan manfaat berupa :
1) Memberikan informasi tentang kesesuaian desain Kapal PSP 01 dilihat dari rasio dimensi utama kapal;
2) Memberikan informasi tentang nilai parameter hidrostatis dan keragaan Kapal PSP 01;
3) Memberikan informasi tentang kualitas stabilitas Kapal PSP pada kondisi muatan berbeda sehingga dapat diperhatikan dalam kegiatan OPI; 4) Memberikan informasi dan bahan pertimbangan kesesuaian desain untuk
kesempurnaan pembuatan kapal selanjutnya.
1.5 Kerangka Pendekatan Studi
1) Rasio dimensi utama kapal (L/B, L/D dan B/D); digunakan untuk melihat kesesuaian desain kapal dengan peruntukannya (static gear, encircling gear, towed gear, multipurpose);
2) Parameter hidrostatis; digunakan untuk mengkaji keragaan kapal dilihat dari coefficient of fineness, TPC dan parameter lainnya;
3) Kualitas stabilitas statis dalam berbagai distribusi muatan; untuk melihat kemampuan kapal bertahan dan kembali ke posisi semula setelah mendapat pengaruh dari gaya-gaya yang datang dari luar.
Penelitian ini merupakan penelitian yang berkaitan satu sama lain sehingga proses penyelesaiannya dilakukan setahap demi setahap berdasarkan tujuan yang telah ditetapkan. Hasil penelitian pada tujuan sebelumnya akan digunakan sebagai dasar perhitungan untuk mencapai tujuan berikutnya.
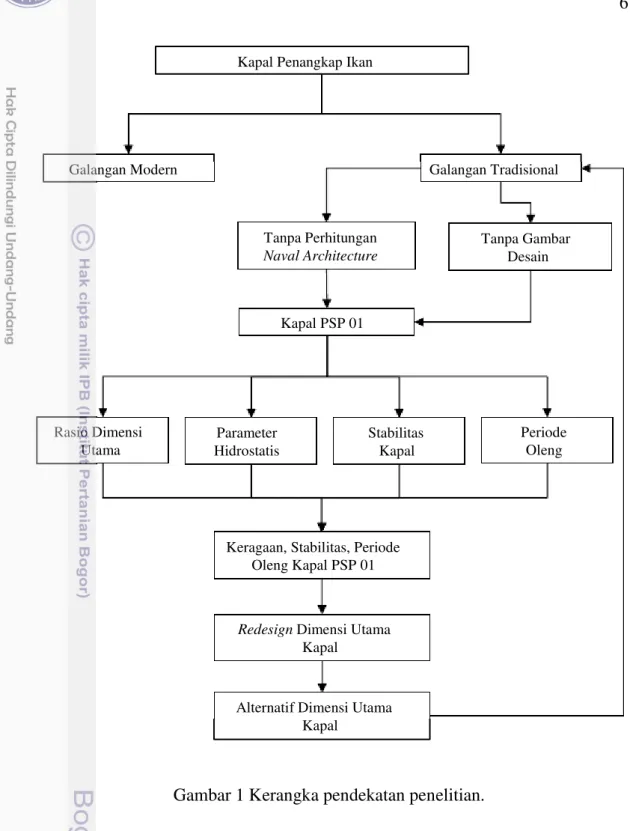
pendekatan penelitian secara umum disajikan pada Gambar 1.
Kerangka
1.6 Hipotesis Penelitian
Hipotesis yang dipakai dalam penelitian ini adalah :
1) Bentuk badan Kapal PSP 01 yang ramping mengurangi kenyamanan kerja ABK diatas kapal karena memiliki periode oleng yang cepat;
Kapal Penangkap Ikan
Galangan Modern
Tanpa Perhitungan
Naval Architecture
Kapal PSP 01
Galangan Tradisional
Tanpa Gambar Desain
Rasio Dimensi Utama
Parameter Hidrostatis
Stabilitas Kapal
Periode Oleng
Keragaan, Stabilitas, Periode Oleng Kapal PSP 01
Redesign Dimensi Utama Kapal
Alternatif Dimensi Utama Kapal
2 TINJAUAN PUSTAKA
2.1 Kapal Perikanan
Kapal merupakan suatu bangunan terapung yang berfungsi sebagai wadah, tempat bekerja (working area) serta sarana transportasi, dan kapal ikan termasuk didalamnya (Iskandar & Novita 1997). Adapun yang dimaksud dengan kapal perikanan menurut Nomura dan Yamazaki (1977) adalah kapal yang digunakan dalam dunia usaha perikanan yang mencakup penggunaan atau aktivitas dalam usaha menangkap atau mengumpulkan sumberdaya perairan, mengelola usaha budidaya perairan dan juga penggunaan dalam beberapa aktivitas (seperti untuk research, training, dan inspeksi sumberdaya perairan). Ayodhyoa (1972) mendefinisikan kapal perikanan sebagai kapal yang digunakan dalam usaha menangkap ikan atau mengumpulkan sumberdaya perairan, pekerjaan-pekerjaan riset, guidance, training, kontrol dan sebagainya yang berhubungan dengan usaha tersebut.
Kapal perikanan memiliki kekhususan tersendiri bila dibandingkan dengan kapal lain pada umumnya. Hal ini disebabkan oleh bervariasinya aktivitas kerja yang dilakukan pada kapal tersebut. Aktivitas yang dilakukan dengan kapal perikanan antara lain mencari daerah penangkapan ikan (fishing ground), mengejar gerombolan ikan, mengoperasikan alat tangkap, dan sebagai tempat untuk menampung dan membawa hasil tangkapan yang diperoleh.
Menurut Iskandar dan Pujiati (1995), kapal penangkap ikan dapat dibedakan menjadi 4 kelompok berdasarkan metode pengoperasian alat yang digunakan, yaitu :
1) Kapal yang mengoperasikan alat yang diam/statis (static gear), contohnya gillnet, trammel net dan pancing;
2) Kapal yang mengoperasikan alat yang ditarik (towed gear/dragged gear), contohnya pancing tonda, trawl, pukat ikan dan lainnya;
3) Kapal yang mengoperasikan alat yang dilingkarkan (encircling gear), seperti purse seine, payang dan dogol;
4) Kapal yang mengoperasikan lebih dari satu alat tangkap yang berbeda (multipurpose).
Kapal yang baik adalah kapal yang mampu memberikan kenyamanan dan keamanan baik selama pelayaran maupun selama proses penangkapan ikan berlangsung. Beberapa persyaratan minimal (general requirement) untuk kapal perikanan yang dapat digunakan untuk operasi penangkapan (Nomura & Yamazaki 1977), yaitu :
1) Memiliki kekuatan struktur badan kapal; 2) Menunjang keberhasilan operasi penangkapan; 3) Memiliki stabilitas yang tinggi; dan
4) Memiliki fasilitas penyimpanan hasil tangkapan ikan yang memadai.
2.2 Dimensi Utama Kapal
Menurut Dohri dan Soedjana (1983) dimensi utama kapal terdiri atas : 1) Panjang kapal (Length/L)
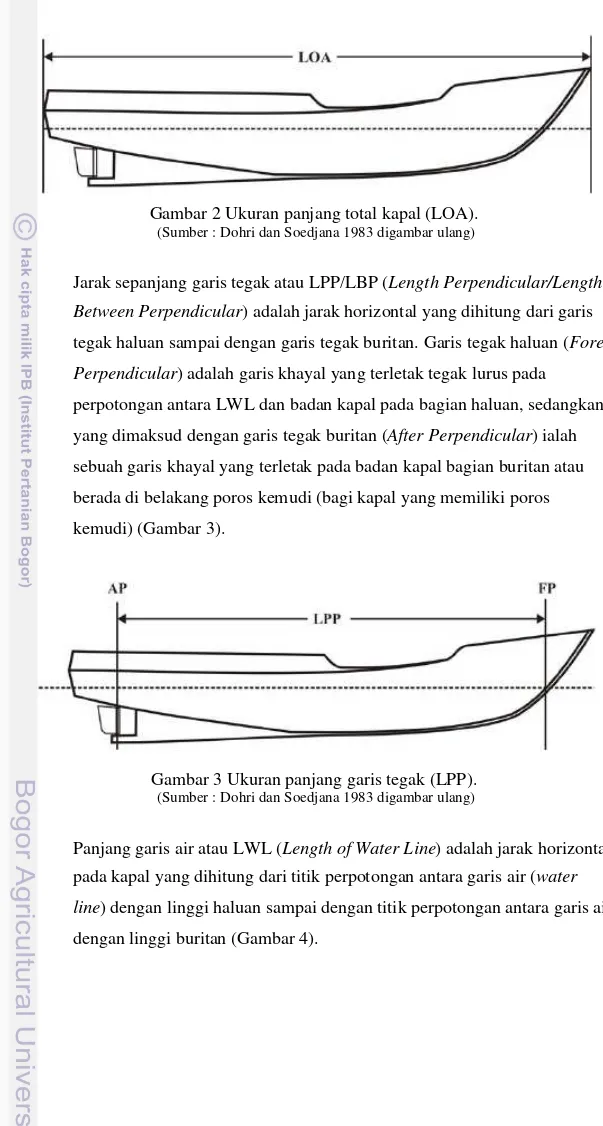
Gambar 2 Ukuran panjang total kapal (LOA).
(Sumber : Dohri dan Soedjana 1983 digambar ulang)
Jarak sepanjang garis tegak atau LPP/LBP (Length Perpendicular/Length Between Perpendicular) adalah jarak horizontal yang dihitung dari garis tegak haluan sampai dengan garis tegak buritan. Garis tegak haluan (Fore Perpendicular) adalah garis khayal yang terletak tegak lurus pada
perpotongan antara LWL dan badan kapal pada bagian haluan, sedangkan yang dimaksud dengan garis tegak buritan (After Perpendicular) ialah sebuah garis khayal yang terletak pada badan kapal bagian buritan atau berada di belakang poros kemudi (bagi kapal yang memiliki poros kemudi) (Gambar 3).
Gambar 3 Ukuran panjang garis tegak (LPP).
(Sumber : Dohri dan Soedjana 1983 digambar ulang)
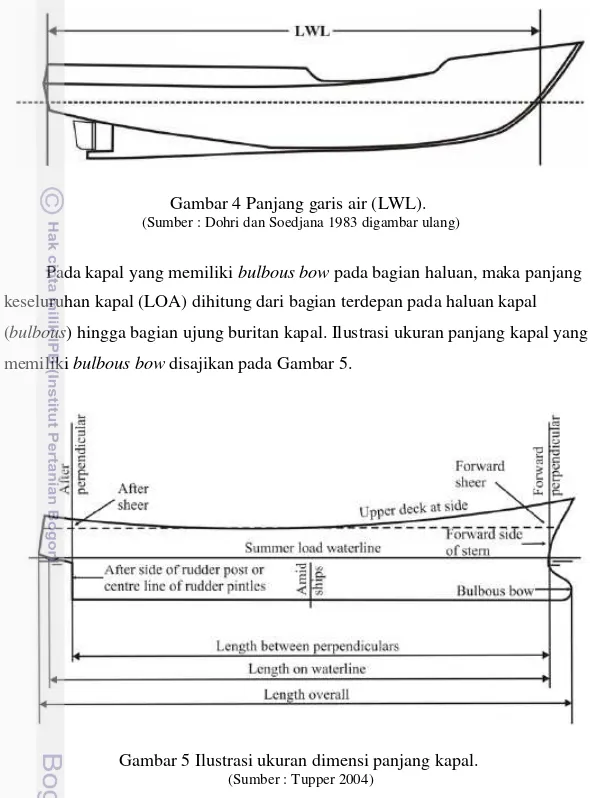
Gambar 4 Panjang garis air (LWL).
(Sumber : Dohri dan Soedjana 1983 digambar ulang)
Pada kapal yang memiliki bulbous bow pada bagian haluan, maka panjang keseluruhan kapal (LOA) dihitung dari bagian terdepan pada haluan kapal
(bulbous) hingga bagian ujung buritan kapal. Ilustrasi ukuran panjang kapal yang memiliki bulbous bow disajikan pada Gambar 5.
Gambar 5 Ilustrasi ukuran dimensi panjang kapal.
(Sumber : Tupper 2004)
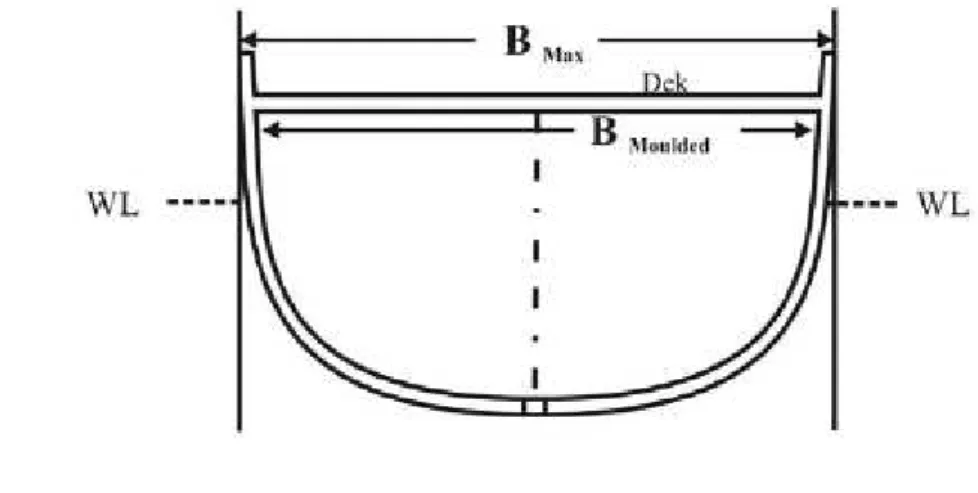
2) Lebar kapal (Breadth/B)
Lebar kapal pada umumnya dibedakan menjadi 2 macam yaitu :
Lebar terbesar atau Bmax (Breadth maximum), adalah jarak horizontal pada
Lebar dalam atau Bmoulded (Breadth moulded), adalah jarak horizontal pada
lebar kapal yang terbesar, diukur dari bagian dalam kulit kapal yang satu ke bagian dalam kulit kapal lainnya yang berhadapan (Gambar 6).
Gambar 6 Lebar kapal.
(Sumber : Dohri dan Soedjana 1983 digambar ulang)
3) Dalam kapal (Depth)
Dalam suatu kapal dibedakan atas :
Dalam atau D (Depth), adalah jarak vertikal yang diukur dari dek terendah kapal sampai titik terendah badan kapal (Gambar 7).
Sarat kapal atau d (draft), adalah jarak vertikal yang diukur dari garis air (water line) tertinggi sampai dengan titik terendah badan kapal (Gambar 7).
Lambung bebas (free board), adalah jarak vertikal/tegak yang diukur dari garis air (water line) tertinggi sampai dengan dek (Gambar 7).
Gambar 7 Dalam kapal.
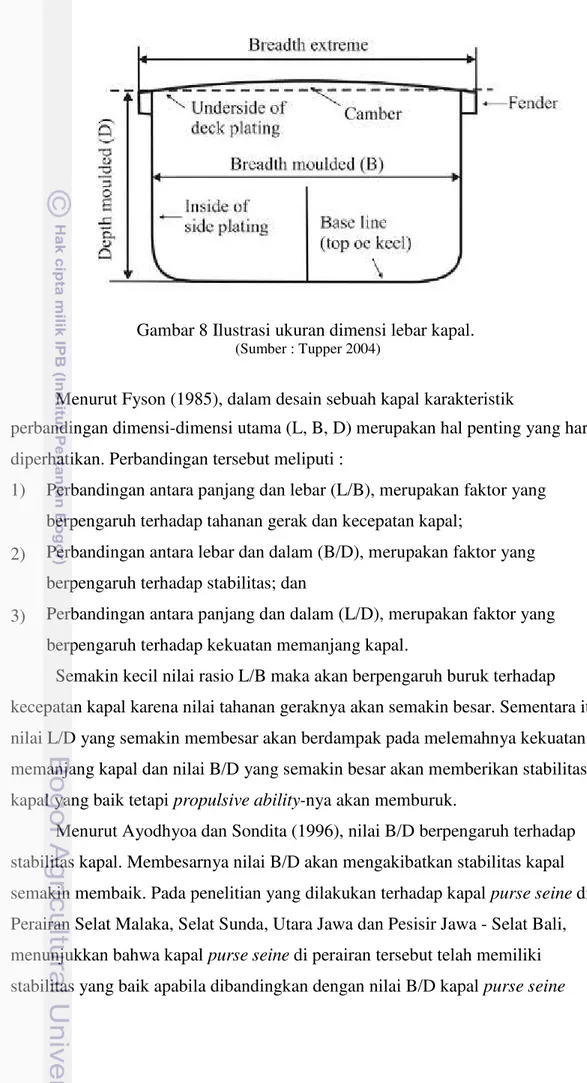
Gambar 8 Ilustrasi ukuran dimensi lebar kapal.
(Sumber : Tupper 2004)
Menurut Fyson (1985), dalam desain sebuah kapal karakteristik
perbandingan dimensi-dimensi utama (L, B, D) merupakan hal penting yang harus diperhatikan. Perbandingan tersebut meliputi :
1)
2)
3)
Perbandingan antara panjang dan lebar (L/B), merupakan faktor yang berpengaruh terhadap tahanan gerak dan kecepatan kapal;
Perbandingan antara lebar dan dalam (B/D), merupakan faktor yang berpengaruh terhadap stabilitas; dan
Perbandingan antara panjang dan dalam (L/D), merupakan faktor yang berpengaruh terhadap kekuatan memanjang kapal.
Semakin kecil nilai rasio L/B maka akan berpengaruh buruk terhadap kecepatan kapal karena nilai tahanan geraknya akan semakin besar. Sementara itu nilai L/D yang semakin membesar akan berdampak pada melemahnya kekuatan memanjang kapal dan nilai B/D yang semakin besar akan memberikan stabilitas kapal yang baik tetapi propulsive ability-nya akan memburuk.
Jepang yang menjadi standar. Begitu pula dengan nilai L/B dan L/D. Nilai keduanya juga telah memenuhi nilai standar sehingga kapal purse seine di Indonesia memiliki kecepatan yang tinggi (ditunjukkan oleh nilai L/B) dan kekuatan memanjang yang baik (ditunjukkan oleh nilai L/D). Penelitian lainnya yang dilakukan oleh Muhammad dan Iskandar (2007) terhadap Kapal Latih dan Penelitian (KLP) Stella Maris menunjukkan bahwa nilai rasio dimensi utama kapal (B/D, L/B dan L/D) yang relatif kecil telah memenuhi standar sehingga memberikan pengaruh yang positif terhadap stabilitas, kekuatan memanjang dan daya dorong kapal.
Rasio dimensi utama kapal penangkap ikan tradisional di Indonesia yang diteliti oleh Iskandar dan Novita (2000) menunjukkan perbedaan kisaran nilai L/B, L/D dan B/D bila dibandingkan dengan nilai rasio dimensi utama kapal pancing Jepang. Untuk nilai L/B dan L/D, dari kapal yang menjadi contoh, nilai rasionya berada diluar nilai kisaran kapal Jepang. Nilai L/B-nya berada di bawah nilai L/B kapal Jepang. Hal ini menunjukkan bahwa rata-rata kapal penangkap ikan di Indonesia memiliki ukuran lebar (B) yang lebih besar. Sementara itu, nilai B/D sebagian kapal contoh berada pada kisaran nilai rasio kapal Jepang sehingga dapat disimpulkan bahwa pembuatan kapal ikan tradisional di Indonesia yang diperoleh secara turun-temurun telah memperhatikan aspek stabilitas dan kekuatan transversal kapal.
2.3 Parameter Hidrostatis
Menurut Iskandar dan Novita (1997), parameter hidrostatis merupakan parameter yang menyangkut kemampuan kapal untuk mengapung di atas air. Parameter hidrostatis juga menggambarkan kondisi awal kapal (by design) sebelum kapal mengalami perubahan berat, variasi trim dan draft. Beberapa parameter hidrostatis yang perlu diketahui antara lain (Derret & Barras 2006) :
2) Ton displacement ( ⊗ ), menunjukkan berat badan kapal di bawah WL atau berat air laut yang dipindahkan pada saat kapal berada dalam air pada draft tertentu.
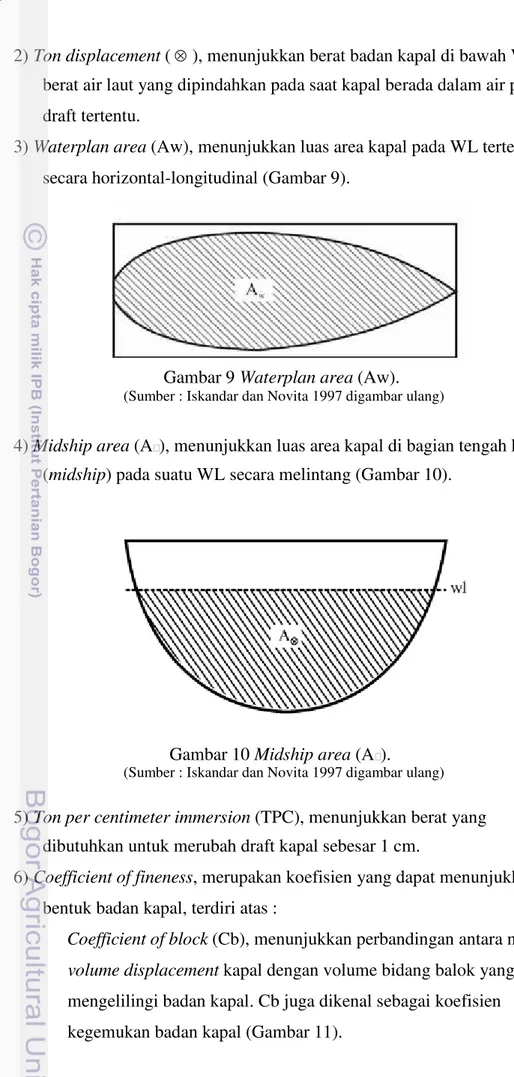
3) Waterplan area (Aw), menunjukkan luas area kapal pada WL tertentu secara horizontal-longitudinal (Gambar 9).
Gambar 9 Waterplan area (Aw).
(Sumber : Iskandar dan Novita 1997 digambar ulang)
4) Midship area (A), menunjukkan luas area kapal di bagian tengah kapal (midship) pada suatu WL secara melintang (Gambar 10).
Gambar 10 Midship area (A).
(Sumber : Iskandar dan Novita 1997 digambar ulang)
5) Ton per centimeter immersion (TPC), menunjukkan berat yang dibutuhkan untuk merubah draft kapal sebesar 1 cm.
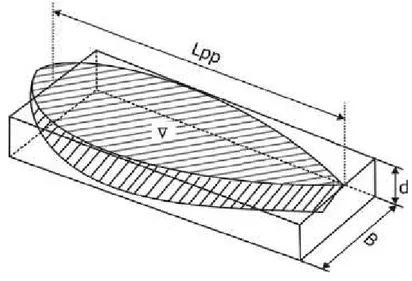
6) Coefficient of fineness, merupakan koefisien yang dapat menunjukkan bentuk badan kapal, terdiri atas :
Gambar 11 Coefficient of block (Cb).
(Sumber : Iskandar dan Novita 1997 digambar ulang)
Coefficient of prismatic (Cp), menunjukkan perbandingan antara volume displacement kapal dengan volume yang dibentuk oleh luas area penampang melintang tengah kapal (A) dan panjang kapal pada garis air tertentu (Lwl). Cp juga dikenal sebagai koefisien yang menunjukkan bentuk badan kapal secara horizontal (Gambar 12). Coefficient vertical prismatic (Cvp), menunjukkan perbandingan antara volume displacement kapal dengan volume yang dibentuk oleh luas area kapal pada WL tertentu secara horizontal-longitudinal (Aw) dan draft kapal. Cvp juga dikenal sebagai koefisien yang menunjukkan bentuk badan kapal secara vertikal (Gambar 12).
Gambar 12 Coefficient of prismatic (Cp) dan Coefficient vertical prismatic (Cvp).
Coefficient of waterplan (Cw), menunjukkan besarnya luas area penampang membujur tengah kapal dibandingkan dengan bidang empat persegi panjang yang mengelilingi luas area tersebut. Cw menunjukkan bentuk badan kapal pada bagian waterplan area (Gambar 13).
Gambar 13 Coefficient of waterplane (Cw).
(Sumber : Iskandar dan Novita 1997 digambar ulang)
Coefficient of midship (C), menunjukkan perbandingan antara luas penampang melintang tengah kapal secara vertikal dengan bidang empat persegi panjang yang mengelilingi luas area tersebut. C
mengambarkan bentuk badan kapal pada bagian tengah kapal/midship (Gambar 14).
Gambar 14 Coefficient of midship (C).
(Sumber : Iskandar dan Novita 1997 digambar ulang)
8) Jarak KB, menunjukkan posisi titik B (buoyancy) dari titik K secara vertikal (Gambar 15).
9) Jarak BM, menunjukkan jarak antara titik B (buoyancy) terhadap titik M (metacentre) secara vertikal (Gambar 15).
10) Jarak KM, menunjukkan jarak antara titik M (metacentre) terhadap titik K secara vertikal (Gambar 15).
11) Jarak KG, menunjukkan jarak antara titik G (gravity) terhadap titik K secara vertikal (Gambar 15).
12) Jarak GM, menunjukkan jarak antara titik M (metacentre) terhadap titik G (gravity) secara vertikal (Gambar 15).
Gambar 15 Jarak KB, BM, KM, KG dan GM.
(Sumber : Iskandar dan Novita 1997 digambar ulang)
13) Jarak BML, menunjukkan posisi BM secara longitudinal, dihitung dari midship kapal.
14) Jarak KML, menunjukkan posisi KM secara longitudinal, dihitung dari midship kapal.
2.4 Stabilitas Kapal
Stabilitas kapal ialah kemampuan kapal untuk kembali ke posisi semula (tegak) setelah menjadi miring akibat bekerjanya gaya, baik gaya dari dalam maupun dari luar kapal tersebut (Hind 1982). Soegiono et al. (2006)
apabila miring (oleng) akibat gelombang, angin dan lain-lain. Kondisi stabilitas kapal dapat dibagi dalam dua jenis yaitu stabilitas statis dan stabilitas dinamis. Stabilitas statis (statical stability) adalah stabilitas kapal yang diukur pada kondisi air tenang dengan beberapa sudut keolengan pada nilai ton displacement yang berbeda. Nilai stabilitas statis kapal ditunjukkan oleh nilai lengan penegak (GZ). Stabilitas dinamis (dynamic stability) adalah stabilitas kapal yang diukur dengan jalan memberikan suatu ”usaha” pada kapal sehingga membentuk sudut keolengan tertentu (Hind 1982).
Stabilitas kapal merupakan salah satu syarat utama yang menjamin
keselamatan dan kenyamanan kerja di atas kapal. Taylor (1977) dan Hind (1982) mengemukakan bahwa stabilitas sebuah kapal dipengaruhi oleh letak titik-titik konsentrasi gaya yang bekerja pada kapal tersebut. Titik tersebut adalah titik B (centre of buoyancy), titik G (centre of gravity), dan titik M (metacentre). Posisi titik G bergantung pada distribusi muatan diatas kapal dan posisi titik B
bergantung pada bentuk kapal yang terendam di dalam air.
2.4.1 Titik-titik penting/utama
Titik-titik penting (utama) yang menentukan keseimbangan kapal awal adalah (Dohri & Soedjana 1983) :
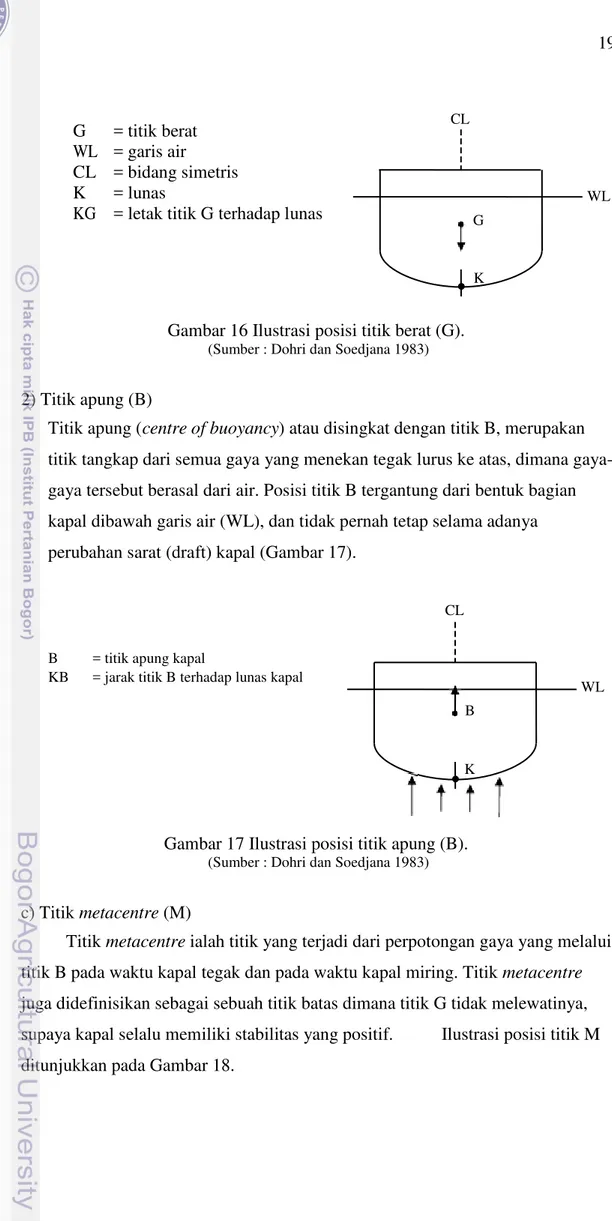
1) Titik berat (G)
Titik berat (Centre of gravity) disingkat dengan titik G, merupakan titik pusat dari gaya-gaya berat yang menekan tegak lurus ke bawah (Gambar 16).
Letak titik berat kapal (G) selalu berada pada tempatnya, yaitu pada sebuah bidang datar yang dibentuk oleh lunas (keel) dan haluan kapal, dimana letak kapal simetris terhadap bidang ini. Bidang tersebut di atas, disebut juga bidang simetris (centre line) disingkat dengan CL.
Letak titik berat kapal (G) akan berubah apabila dalam kapal tersebut terjadi penambahan, pengurangan, dan pergeseran posisi muatan. Dalam stabilitas awal (initial stability) walaupun titik G keluar dari bidang
G WL CL
= titik berat = garis air
= bidang simetris
CL
K KG
= lunas
= letak titik G terhadap lunas G
WL
K
Gambar 16 Ilustrasi posisi titik berat (G).
(Sumber : Dohri dan Soedjana 1983)
2) Titik apung (B)
Titik apung (centre of buoyancy) atau disingkat dengan titik B, merupakan titik tangkap dari semua gaya yang menekan tegak lurus ke atas, dimana gaya- gaya tersebut berasal dari air. Posisi titik B tergantung dari bentuk bagian kapal dibawah garis air (WL), dan tidak pernah tetap selama adanya perubahan sarat (draft) kapal (Gambar 17).
CL
B = titik apung kapal
KB = jarak titik B terhadap lunas kapal
WL
B
K
Gambar 17 Ilustrasi posisi titik apung (B).
(Sumber : Dohri dan Soedjana 1983)
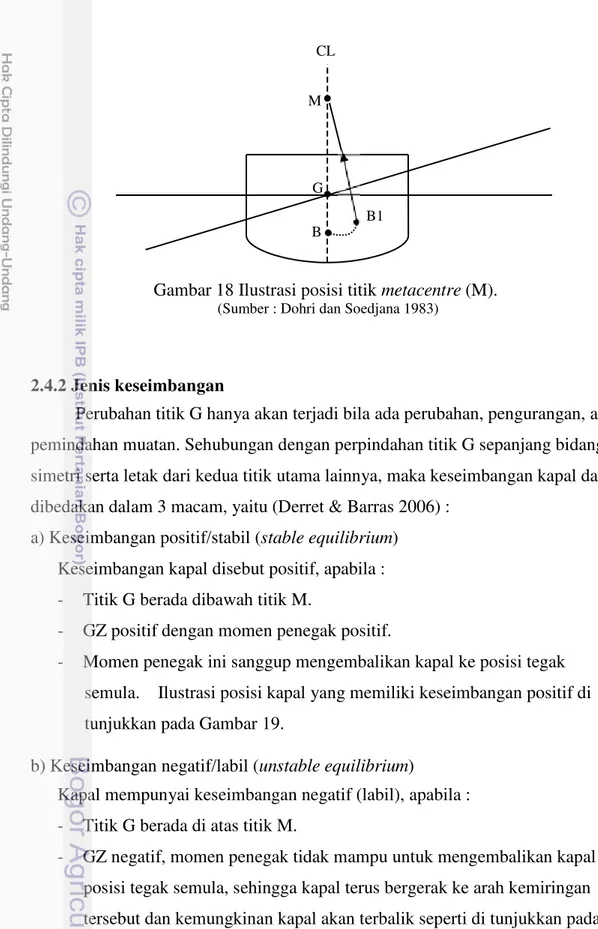
c) Titik metacentre (M)
Titik metacentre ialah titik yang terjadi dari perpotongan gaya yang melalui titik B pada waktu kapal tegak dan pada waktu kapal miring. Titik metacentre juga didefinisikan sebagai sebuah titik batas dimana titik G tidak melewatinya, supaya kapal selalu memiliki stabilitas yang positif.
ditunjukkan pada Gambar 18.
CL
M
G
B
B1
Gambar 18 Ilustrasi posisi titik metacentre (M).
(Sumber : Dohri dan Soedjana 1983)
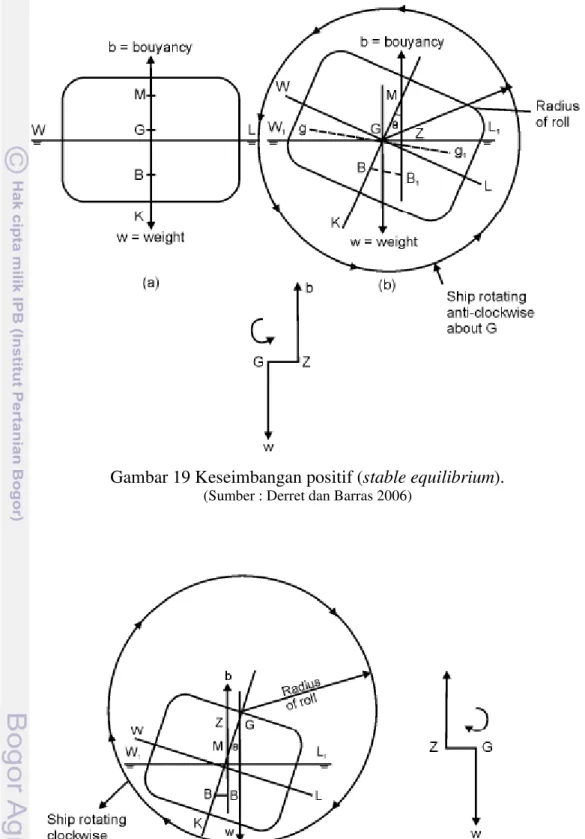
2.4.2 Jenis keseimbangan
Perubahan titik G hanya akan terjadi bila ada perubahan, pengurangan, atau pemindahan muatan. Sehubungan dengan perpindahan titik G sepanjang bidang simetri serta letak dari kedua titik utama lainnya, maka keseimbangan kapal dapat dibedakan dalam 3 macam, yaitu (Derret & Barras 2006) :
a) Keseimbangan positif/stabil (stable equilibrium) Keseimbangan kapal disebut positif, apabila : -
- -
Titik G berada dibawah titik M.
GZ positif dengan momen penegak positif.
Momen penegak ini sanggup mengembalikan kapal ke posisi tegak semula. Ilustrasi posisi kapal yang memiliki keseimbangan positif di tunjukkan pada Gambar 19.
b) Keseimbangan negatif/labil (unstable equilibrium)
Kapal mempunyai keseimbangan negatif (labil), apabila : -
-
Titik G berada di atas titik M.
Gambar 19 Keseimbangan positif (stable equilibrium).
(Sumber : Derret dan Barras 2006)
Gambar 20 Keseimbangan negatif (unstable equilibrium).
c) Keseimbangan netral (neutral equilibrium)
Kapal disebut memiliki keseimbangan netral, apabila : -
-
Letak titik G dan M berimpit.
Kapal miring akibat gaya yang bekerja dan akan tetap miring, karena tidak ada lengan penegak, dengan sendirinya momen penegak tidak ada.
Ilustrasi kapal yang memiliki keseimbangan netral disajikan pada Gambar 21.
Gambar 21 Keseimbangan netral (neutral equilibrium).
(Sumber : Derret dan Barras 2006)
Keterangan :
(a) : Posisi keseimbangan (b) : Keseimbangan yang stabil (c) : Keseimbangan yang tidak stabil (d) : Keseimbangan netral
B : Titik pusat apung
M : Titik metacentre
GZ : Lengan pengembali K : Lunas
WL : Garis air
W : Gaya yang bekerja
G : Titik pusat berat θ : Sudut oleng
Gambar 22 Posisi keseimbangan.
(Sumber : Hind 1982)
2.5 Kurva Stabilitas Statis (Kurva GZ)
Belenky (1993) menyatakan bahwa keselamatan kapal dipengaruhi oleh beberapa nilai yaitu besar GM kapal, vanishing angle dan stabilitas dinamis. Oleh karena itu perhitungan lengan penegak (GZ) dan distribusi muatan di atas kapal sangat erat kaitannya dengan stabilitas kapal. Perubahan/perbedaan distribusi muatan kapal akan mengakibatkan terjadinya perubahan nilai KG yang pada akhirnya juga akan merubah besar lengan penegak (GZ) yang dihasilkan.
Rawson dan Tupper (1984) menyatakan bahwa stabilitas dapat dijelaskan dalam bentuk momen pengembali/kopel yang dihasilkan dari titik pusat gravitasi ketika kapal menjadi miring dengan perubahan berat yang tetap/konstan.
Besarnya lengan pengembali/kopel dapat disajikan dalam bentuk kurva GZ. Selain menunjukkan besarnya lengan pengembali/kopel, kurva GZ juga memberikan informasi lain meliputi :
(1) Nilai lengan pengembali untuk sudut kemiringan yang kecil adalah
proporsional terhadap sudut kemiringan, dimana nilai tangent GZ pada titik ini menggambarkan tinggi metacentre;
(2) Nilai maksimum GZ dimana nilainya proporsional dengan momen terbesar yang menyebabkan sudut kemiringan maksimum dan kapal tidak tenggelam; (3) Nilai selang stabilitas (range of stabillity), yaitu nilai selang dimana nilai GZ
adalah positif. Nilai ini biasanya berada pada selang antara 0˚ sampai 90˚, dimana kapal akan kembali ke posisi semula setelah momen/gaya yang menyebabkan kemiringan hilang;
(4) Sudut kemiringan pinggir dek kapal. Terdapat sebuah titik perubahan kurva pada sebagian besar bentuk kapal, dimana kurva dapat berubah secara drastis pada sudut bagian pinggir dek menjadi miring;
(5) Area dibawah kurva. Area ini menggambarkan kemampuan kapal untuk menyerap energi yang diberikan oleh angin, gelombang, dan gaya eksternal lainnya.
Gambar 23 Kurva stabilitas statis (Kurva GZ).
(Sumber : Derret dan Barras 2006)
Beberapa informasi mengenai stabilitas dapat ditemukan didalam kurva tersebut. Informasi-informasi tersebut yaitu :
(1) Selang stabilitas (The range of stability), yaitu selang dimana kapal memiliki nilai GZ positif, ditunjukkan oleh jarak CD;
(2) The angle of vanishing stability, yaitu sudut kemiringan dimana nilai GZ kembali nol atau besar sudut dimana nilai GZ berubah dari positif menjadi negatif, ditunjukkan oleh titik D;
(3) Nilai maksimum GZ (The maximum GZ), merupakan nilai pada sumbu x pada puncak tertinggi pada kurva stabilitas; dan
(4) Tinggi metacentre (GM), pada gambar di atas ditunjukkan oleh tinggi YZ.
Titik Z bernilai 1 radian (180/π).
2.6 Stabilitas Dinamis
≤ + PG BG∞
≤ + BG cos BG∞
≤ BG (1 cos )∞
Istopo (1997), stabilitas dinamis merupakan sejumlah tenaga yang diperlukan untuk membuat kapal senget pada sudut tertentu. Besar kerja tersebut adalah sama dengan berat kapal dikalikan dengan jarak antara dua garis tegak yang melalui titik berat dan titik benam (titik pusat gaya tekan air ke atas). Ilustrasi dan perhitungan stabilitas dinamis disajikan pada Gambar 24 dan Gambar 25.
Gambar 24 Ilustrasi perhitungan stabilitas dinamis.
Perhitungan stabilitas dinamis dengan formula Moseley’s (Derret & Barras 2006) adalah sebagai berikut :
Besar gaya = Berat x Jarak vertikal G dan B Stabilitas dinamis = W x (B1Z – BG)
= W x (B1R + RZ – BG) ϒ v ( gh + g1h1 )
=Wx ′
V
ϒ v ( gh + g1h1 )
=Wx ′
V
ϒ v ( gh + g1h1 )
Stabilitas dinamis = W x ′
V
⁄ ƒ
Gambar 25 Prinsip perhitungan stabilitas dinamis dari kurva stabilitas statis.
Apabila kurva stabilitas statis kapal telah diketahui maka nilai stabilitas dinamis dapat dihitung dengan menjumlahkan luas bagian (area) dibawah kurva pada sudut oleng yang berbeda. Prinsip perhitungan yang digunakan adalah
berdasarkan prinsip perhitungan luas trapesium (trapezoidal). Perhitungan dilakukan dengan membagi area dibawah kurva dengan jarak sudut oleng yang sekecil mungkin. Oleh karena itu, jarak sudut oleng yang digunakan adalah 1 radian sehingga secara sederhana dapat dirumuskan sebagai berikut :
Luas area (m.rad) = Jika (a1 - a0) = h, maka :
2 y1 + y0
⋅
(
a1 a0)
Luas (m.rad) = 2 y1 + y 0
Keterangan : y1
y0
h a1
a0
= nilai GZ pada sudut yang lebih besar (m); = nilai GZ pada sudut yang lebih kecil (m); = selisih antara dua sudut (rad);
5°
3.1 Waktu dan Tempat Penelitian
Penelitian dilaksanakan pada bulan Juli - Desember 2009. Penelitian dilaksanakan di dua tempat, yaitu di Palabuhanratu, Sukabumi, Jawa Barat untuk pengukuran langsung Kapal PSP 01, dan di Bagian Kapal dan Transportasi Perikanan Departemen Pemanfaatan Sumberdaya Perikanan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor untuk pembuatan lines plan,
perhitungan rasio dimensi utama, perhitungan parameter hidrostatis, perhitungan stabilitas, simulasi distribusi muatan, periode oleng serta proses redesign Kapal PSP 01. Peta lokasi penelitian disajikan pada Gambar 26.
106°3'10" 107°6'20"
LAUT JAWA
108°9'30"
Serang Kdy. TangerangJakarta Utara
TangerangJakarta Barat
Bekasi
Jakarta Timur Karawang
Lebak
Bogor
Purwakarta Subang
Pandeglang
Kdy. Sukabumi Kdy. Bandung
# Palabuhanratu
Sukabumi Cianjur
Bandung
106°3'10" 107°6'20" 108°9'30"
30 0 30 60 90 Miles
Sumber : Peta Rupa Bumi Indonesia BAKOSURTANAL 2007
3.2 Peralatan Penelitian
Peralatan yang digunakan antara lain alat tulis, alat ukur (meteran) waterpass, jangka sorong, benang ukur, pendulum, kamera, dan satu unit komputer. Perangkat lunak (soft ware) yang digunakan adalah microsoft excel untuk perhitungan hidrostatis, dan program maxsurf versi 9.6 untuk menghitung stabilitas kapal dalam berbagai kondisi muatan serta melakukan redesign untuk mendapatkan desain yang lebih ideal. Kapal yang diukur adalah Kapal PSP 01 yang merupakan kapal riset dan penangkapan milik Departemen Pemanfaatan Sumberdaya Perikanan FPIK IPB. Gambar Kapal PSP 01 dapat dilihat pada Gambar 27.
Gambar 27 Kapal penangkap ikan PSP 01.
3.3 Metode Penelitian
Penelitian ini menggunakan metode studi kasus dan simulasi numerik. Kasus yang diteliti adalah stabilitas Kapal PSP 01 baik stabilitas statis, dinamis maupun stabilitas kapal pada simulasi distribusi muatan yang berbeda. Kualitas stabilitas statis dan dinamis kapal dapat diperoleh melalui perhitungan
menggunakan formula naval architecture dan hasilnya diinterpretasikan secara deskriptif sehingga lebih mudah untuk dipahami.
terhadap distribusi muatan dilakukan berdasarkan pada aturan Code on Intact Stability for All Type of Ships (IMO 1995) serta pertimbangan kondisi yang sering dialami kapal saat dioperasikan. Beberapa hal yang harus diperhitungkan dalam melakukan simulasi distribusi muatan diantaranya adalah :
1) Jenis dan berat muatan yang dapat dipindahkan; 2) Jenis dan berat muatan yang tidak dapat dipindahkan;
3) Total berat muatan di bagian sisi kanan dan kiri centre line serta di bagian depan dan belakang midship, tidak berbeda signifikan;
4) Kondisi eksisting (seperti posisi nelayan yang duduk atau berdiri); 5) Kenyamanan kerja nelayan (faktor ergonomis); dan
6) Keberadaan titik berat (G) secara vertikal.
3.3.1 Jenis data
Jenis data yang dikumpulkan untuk mencapai tujuan pertama adalah dimensi utama kapal meliputi panjang total (LOA) panjang antara dua garis tegak
(Lpp), lebar kapal (B) dan dalam kapal (D). Selain itu, data kelengkungan badan kapal yang telah dipindahkan dalam bentuk lines plan digunakan untuk
3.3.2 Metode pengumpulan data
Tujuan pertama dari penelitian ini adalah mengkaji kesesuaian desain kapal PSP 01 dilihat dari rasio dimensi utama kapal (L/B, L/D dan B/D) dan parameter hidrostatis dengan alat tangkap yang digunakan. Oleh karena itu untuk mencapai tujuan tersebut maka langkah-langkah yang dilakukan adalah sebagai berikut : 1) Mengukur dimensi utama kapal (L, B, D) dan membagi panjang total kapal
(LOA) menjadi 11 ordinat (0-10);
2) Mengukur kelengkungan badan kapal pada setiap ordinat; 3) Mengidentifikasi jenis alat tangkap yang digunakan;
4) Menggambar lines plan kapal dari data kelengkungan badan kapal yang diperoleh;
5) Menghitung nilai rasio dimensi utama kapal meliputi L/B, L/D dan B/D; 6) Menghitung nilai parameter hidrostatis kapal;
7) Membandingkan nilai rasio dimensi utama dan parameter hidrostatis dengan nilai acuan.
Nilai KG, draft dan ton displacement merupakan parameter hidrostatis yang diperlukan untuk perhitungan stabilitas kapal dalam rangka mencapai tujuan kedua. Tujuan kedua adalah menghitung stabilitas Kapal PSP 01 dalam kondisi kosong (kasko) dan stabilitas kapal dengan berbagai kondisi muatan. Tahap ini merupakan lanjutan dari tahap-tahap sebelumnya. Langkah-langkah yang dilakukan untuk menghitung stabilitas kapal kosong (kasko) adalah:
1) Menghitung nilai GZ kapal dengan menggunakan data parameter hidrostatis
yang telah diperoleh dengan bantuan program maxsurf versi 9.6;
2) Membuat kurva stabilitas statis yang menunjukkan nilai lengan penegak (GZ) pada sudut oleng tertentu;
3) Membandingkan nilai lengan penegak (GZ) yang diperoleh dengan nilai standar yang dikeluarkan oleh International Maritime Organization (IMO); 4) Menganalisis dan menginterpretasikan nilai lengan penegak (GZ) yang
diperoleh setelah dibandingkan dengan kriteria IMO.
muatan. Hal ini dimaksudkan untuk mengetahui kondisi stabilitas kapal baik pada saat akan berangkat ke daerah penangkapan maupun saat kembali dari operasi penangkapan. Kondisi ini sangat penting untuk diketahui karena berhubungan erat dengan keselamatan kapal di perairan. Kondisi muatan yang disimulasikan antara lain (mengacu pada IMO 1995) :
Kondisi 1 : Kapal berangkat ke fishing ground dengan kondisi bahan bakar penuh, perbekalan, es, alat tangkap dan lain-lain;
Kondisi 2 : Kapal berangkat dari fishing ground dengan hasil tangkapan penuh (50% perbekalan dan BBM);
Kondisi 3 : Kapal tiba di fishing base dengan hasil tangkapan penuh, 10% perbekalan, bahan bakar dan lain-lain;
Kondisi 4 : Tiba di fishing base dengan 20% hasil tangkapan, 10% perbekalan, bahan bakar dan lain-lain.
Langkah-langkah yang dilakukan untuk menghitung stabilitas kapal dalam 4 kondisi muatan tersebut adalah :
1) Mengukur berat tiap muatan kapal, diperoleh melalui wawancara dan pengukuran langsung;
2) Menentukan posisi tiap muatan kapal, diperoleh melalui pengamatan secara langsung (untuk kondisi eksisting), dan simulasi distribusi muatan untuk kondisi yang lain.
3) Menghitung jarak titik berat tiap muatan secara vertikal, diukur dari badan kapal paling bawah (K) sampai ke titik berat pada masing-masing muatan (Z) (Gambar 28).
4) Menghitung jarak titik berat tiap muatan secara longitudinal, diukur dari midship kapal () sampai ke titik berat pada masing-masing muatan (Z) (Gambar 28).
5) Menghitung nilai GZ kapal menggunakan soft ware maxsurf versi 9.6 untuk setiap kondisi yang disimulasikan;
6) Membuat kurva stabilitas statis untuk setiap kondisi yang disimulasikan; 7) Membandingkan kriteria stabilitas kapal pada setiap kondisi muatan dengan
Gambar 28 Ilustrasi pengukuran jarak titik berat tiap muatan kapal secara vertikal dan longitudinal.
Hasil yang diperoleh dari tujuan pertama dan kedua merupakan dasar untuk mencapai tujuan ketiga. Proses redesign dilakukan dengan merubah ukuran dimensi utama kapal dalam hal ini ukuran lebar (B) dan dalam kapal (D). Kapal yang telah mengalami perubahan dimensi kemudian dianalisis rasio dimensi utama, parameter hidrostatis, stabilitas dan periode olengnya. Selanjutnya keempat nilai parameter tersebut dibandingkan dengan nilai Kapal PSP 01 untuk mendapatkan dimensi kapal yang lebih ideal berdasarkan parameter teknis tersebut.
3.3.3 Pengolahan data
Rasio dimensi utama kapal diperoleh dengan membandingkan masing- masing dimensi utama kapal yaitu Lpp, LOA, B dan D sehingga diperoleh nilai
rasio antara L/B, L/D dan B/D. Data rasio dimensi utama tersebut merupakan hasil yang dianalisis sesuai dengan tujuan yang pertama. Untuk nilai parameter hidrostatis kapal sebagai langkah untuk melengkapi tujuan pertama, dapat diperoleh dengan melakukan pengolahan data dari lines plan dengan
menggunakan rumus naval architecture (Gillmer & Johnson 1982 dan Tupper 2004). Parameter hidrostatis yang dihitung antara lain:
(1) Volume displacement ( ), dengan rumus Simpson I
= 3 h
(A0 + 4A1 + 2 A2 + .... + 4An + An+1) ... (1)
Keterangan :
(2)
(3)
Ton displacement ( ⊗ ), dengan rumus :
⊗ = × δ ... (2) Keterangan :
= Volume displacement (m³)
δ = Densitas/berat jenis air laut (1,025 ton/m³)
Waterplane area (Aw), dengan rumus Simpson I
Aw = 3 h
(Y0 + 4Y1+ 2Y2+ .... + 4Yn + Yn+1) ...(3)
Keterangan :
h = Jarak antar ordinat pada garis air (WL) tertentu Yn = Lebar pada ordinat ke-n (m)
(4)
(5)
Ton Per Centimeter (TPC), dengan rumus :
TPC = (Aw/100) × 1,025 ...(4) Keterangan :
Aw = Waterplane area (m²)
Coefficient of block (Cb), dengan rumus :
Cb =
L ⋅ B ⋅ D ... (5)
Keterangan :
= Volume displacement (m³) L = Panjang kapal (m)
B = Lebar kapal (m) D = draft kapal (m)
(6) Coefficient of midship (C), dengan rumus :
C = A / (B × d) ... (6) Keterangan :
A = Luas tengah kapal (m²) B = Lebar kapal (m)
(7)
(8)
(9)
Coefficient of prismatic (Cp), dengan rumus :
Cp = / (A × L) ... (7) Keterangan :
= Volume displacement (m³) A = Luas area tengah kapal (m²) L = Panjang kapal (m)
Coefficient of vertical prismatic (Cvp), dengan rumus :
Cvp = / (Aw × d) ... (8) Keterangan :
= Volume displacement (m³) Aw = Waterplane area (m²) d = draft kapal (m)
Coefficient of waterplane (Cw), dengan rumus :
Cw = Aw / (L × B) ... (9) Keterangan :
Aw = Waterplane area (m²) L = Panjang kapal (m) B = Lebar kapal (m)
(10) Jarak titik apung (B) terhadap lunas (K), dengan rumus :
KB = 1/3 [ 2,5 d – ( /Aw) ] ... (10) Keterangan :
= Volume displacement (m³) Aw = Waterplane area (m²) d = draft kapal (m)
(11) Jarak titik apung (B) terhadap titik metacentre (M), dengan rumus : BM = I / ...(11) Keterangan :
= Volume displacement (m³) I = Moment innertia
(12) Jarak metacentre (M) terhadap lunas (K), dengan rumus :
KM = KB + BM ... (12) Keterangan :
(13) Jarak titik apung terhadap metacentre longitudinal (BML), dapat dihitung
dengan rumus :
BML = IL / ... (13)
Keterangan :
IL = Innertia longitudinal = Volume displacement (m³)
(14) Jarak metacentre longitudinal terhadap lunas (KML)
KML = KB + BML ... (14)
Keterangan :
KB = Jarak titik apung terhadap lunas
BML = Jarak titik apung terhadap metacentre longitudinal
(15) Jarak titik berat (G) terhadap lunas (K), dengan rumus :
KG = I / ⊗ ... (15) Keterangan :
⊗ = Ton displacement (ton) I = Moment innertia
(16) Jarak titik berat (G) terhadap metacentre (M), dengan rumus :
GM = KM – KG ... (16) Keterangan :
KM = Jarak metacentre terhadap lunas (m) KG = Jarak titik berat terhadap lunas (m)
Kondisi stabilitas kapal diperoleh dengan melakukan simulasi numerik berdasarkan data parameter hidrostatik yang telah dihitung. Untuk mencapai tujuan kedua ini digunakan program maxsurf versi 9.6. Hasil pengolahan dengan maxsurf versi 9.6 selanjutnya diolah menggunakan microsoft excel untuk
memperoleh kurva stabilitas statis. Kurva yang diperoleh merupakan kurva stabilitas kapal dalam kondisi kosong (kasko).
Setelah stabilitas kasko kapal diketahui, maka dilakukan perhitungan untuk mengetahui stabilitas kapal dengan distribusi muatan yang berbeda. Untuk mengetahui kondisi stabilitas kapal dengan distribusi muatan yang berbeda, maka perlu dilakukan perhitungan-perhitungan sebagai berikut :
2) Menghitung draft kapal pada setiap kondisi muatan yang disimulasikan; 3) Menghitung kondisi stabilitas kapal pada setiap kondisi muatan;
4) Melakukan analisis hasil perhitungan stabilitas kapal berdasarkan kondisi muatan yang berbeda.
Nilai KG, LCG dan draft kapal yang berbeda dalam setiap kondisi muatan yang disimulasikan berpengaruh terhadap kondisi stabilitas. Semakin rendah KG maka stabilitas kapal akan semakin baik. Nilai KG, LCG dan draft kapal dalam 4 kondisi yang disimulasikan disajikan pada Tabel 1.
Tabel 1 Karakteristik kapal pada kondisi muatan yang disimulasikan
No.
Kenyamanan kerja diatas kapal dapat dilihat dari parameter periode oleng (rolling period). Semakin cepat periode oleng yang dimiliki oleh suatu kapal, maka kenyamanan kerja ABK akan semakin terganggu. Sebaliknya, periode oleng kapal yang lebih lambat memberikan tingkat kenyamanan yang lebih baik. Nilai periode oleng kapal dihitung menggunakan formula sederhana sebagai berikut (IMO 1995);
Dimensi Kapal PSP 01 belum cukup ideal sebagai kapal static gear karena ukuran lebarnya tidak proporsional dengan ukuran panjangnya. Hal ini menyebabkan bentuk badan kapal menjadi ramping dan mudah oleng sehingga kenyamanan kerja diatas kapal menjadi berkurang. Oleh karena itu perlu dilakukan proses desain ulang untuk mendapatkan dimensi kapal yang lebih optimal bagi pembuatan kapal sejenis dimasa mendatang. Proses redesign dilakukan dengan melakukan simulasi perubahan ukuran dimensi utama Kapal PSP 01 berdasarkan pada hasil analisis yang telah diperoleh sebelumnya.
Secara umum, simulasi perubahan ukuran kapal dilakukan dalam 4 tahap. Tahap pertama adalah melakukan simulasi terhadap ukuran panjang kapal (LOA)
pada ukuran lebar (B) dan dalam (D) yang tetap. Perubahan panjang kapal dilakukan dengan merubah (penambahan dan pengurangan) nilai L/B setiap 0,2 satuan dari nilai L/B Kapal PSP 01. Hal ini dilakukan untuk mendapatkan kisaran nilai L/B yang lebih kecil. Kapal hasil redesign yang telah mengalami perubahan panjang kemudian dihitung nilai parameter hidrostatis, stabilitas dan periode olengnya untuk kemudian dibandingkan dengan Kapal PSP 01.
Tahap kedua adalah melakukan simulasi perubahan lebar (B) kapal pada panjang (L) dan dalam (D) yang tetap. Perubahan lebar didasarkan pada nilai L/B yang dirubah (penambahan dan pengurangan) sebesar 0,2 satuan dari nilai L/B Kapal PSP 01. Kapal yang telah mengalami perubahan lebar kemudian dihitung nilai parameter hidrostatis, stabilitas dan periode olengnya untuk selanjutnya dibandingkan dengan Kapal PSP 01 sehingga pengaruh perubahan lebar dapat diketahui lebih detail.
Tahap ketiga adalah melakukan simulasi perubahan ukuran dalam (D) pada ukuran panjang (L) dan lebar (B) yang tetap. Perubahan ukuran dalam didasarkan pada nilai B/D yang dirubah (penambahan dan pengurangan) sebesar 0,2 satuan. Kapal yang telah mengalami perubahan dalam kemudian dihitung nilai parameter hidrostatis, stabilitas dan periode olengnya dan selanjutnya dibandingkan dengan Kapal PSP 01.
signifikan terhadap kondisi stabilitas dan periode oleng kapal. Perubahan lebar kapal lebih banyak memberikan pengaruh terhadap stabilitas dan periode oleng dibandingkan perubahan dalam. Oleh karena itu, simulasi perubahan lebar yang dilakukan adalah dengan mengurangi nilai L/B Kapal PSP 01 sebesar 0,1 satuan. Sementara itu, perubahan dalam kapal dilakukan dengan mengurangi nilai B/D Kapal PSP 01 sebesar 0,01 satuan. Formulasi pengurangan nilai L/B dan B/D tersebut menyebabkan penambahan ukuran lebar kapal menjadi 2 kali
penambahan dalam kapal untuk setiap ukuran yang disimulasikan. Kapal hasil simulasi perubahan ukuran lebar dan dalam kemudian dihitung nilai parameter hidrostatis, stabilitas dan periode oleng untuk dibandingkan dengan Kapal PSP 01. Desain kapal yang memiliki nilai paling baik kemudian dipilih sebagai alternatif ukuran kapal yang lebih ideal.
3.3.4 Analisis data
3.3.4.1 Rasio dimensi utama
Analisis data yang dilakukan merupakan analisis numerik dari nilai-nilai yang diperoleh pada setiap tahapan sesuai dengan tujuan penelitian. Pada tujuan pertama, analisis data dilakukan terhadap hasil perhitungan L/B, L/D dan B/D untuk melihat kesesuaian desain dengan peruntukan Kapal PSP 01. Selain itu, nilai rasio dimensi utama kapal yang diperoleh kemudian dibandingkan dengan hasil penelitian Iskandar dan Pujiati (1995) yang merekomendasikan suatu nilai kisaran rasio dimensi utama kapal perikanan di Indonesia berdasarkan kelompok metode pengoperasian alat tangkap yang digunakan. Rekomendasi nilai rasio dimensi utama kapal perikanan di Indonesia disajikan pada Tabel 2.
Tabel 2 Nilai rasio dimensi utama kapal penangkap ikan di Indonesia
Kelompok Kapal
Yilmaz and Kükner (1999) memberikan kisaran rasio dimensi utama yang berbeda. Rasio ini diambil dari hasil penelitian di beberapa lokasi yang berbeda seperti ditunjukkan pada Tabel 3.
Tabel 3 Nilai rasio dimensi utama kapal di beberapa tempat berbeda
Kelompok Kapal
UBC (Çalişal and McGreer 1993)
ITU (Kafali, 1980)
BSRA (Pattulo and Thomson, 1965) Ridgely-Nevitt (1967)
3.3.4.2 Parameter hidrostatis
Kesesuaian dan keragaan kapal selain dapat dilihat secara langsung juga dapat dilihat melalui nilai parameter hidrostatisnya. Parameter hidrostatis yang dibandingkan adalah nilai coefficient of fineness. Koefisien ini juga sering disebut sebagai koefisien bentuk badan kapal. Hasil perhitungan dibandingkan dengan hasil penelitian Iskandar dan Pujiati (1995) seperti ditunjukkan pada Tabel 4. Nilai tersebut merupakan kisaran nilai koefisien bentuk badan kapal di Indonesia tetapi bukan merupakan nilai mutlak (standar baku).
Tabel 4 Nilai coefficient of fineness kapal penangkap ikan di Indonesia
Encircling gear Towed gear Static gear
Cb
Sumber : Iskandar dan Pujiati (1995)
Tabel 5 Nilai acuan coefficient of fineness kapal longline Jepang Coefficient of fineness
Cb Cp C
Cw Cvp
Nilai Acuan 0,61-0,72 0,65-0,75 0,88-0,98 0,83-0,90 0,84-0,96
3.3.4.3 Stabilitas statis
Stabilitas statis (statical stability) adalah stabilitas kapal yang diukur pada kondisi air tenang dengan beberapa sudut keolengan pada nilai ton displacement yang berbeda, atau dengan kata lain stabilitas yang diukur dengan beberapa distribusi muatan dan sudut keolengan berbeda. Nilai stabilitas statis ditunjukkan oleh lengan GZ. Lengan GZ merupakan lengan pengembali bagi kapal agar kembali ke posisi semula (tegak) setelah mengalami oleng akibat pengaruh faktor internal maupun eksternal. Analisis stabilitas statis dilakukan dengan studi perbandingan (comparative study), yaitu membandingkan beberapa kriteria stabilitas. Kriteria yang dimaksud adalah selang stabilitas, nilai maksimum GZ, sudut pada saat GZ maksimum, dan GM. Nilai-nilai kriteria tersebut diperoleh dari hasil perhitungan dengan menggunakan program maxsurf dan microsoft excel. Penghitungan stabilitas dilakukan pada kapal kosong maupun kapal dengan distribusi muatan yang berbeda. Hal ini dilakukan untuk melihat kualitas stabilitas Kapal PSP 01 dalam berbagai kondisi sehingga dapat dijadikan pedoman pada saat melakukan OPI.
Beberapa asumsi yang digunakan dalam penelitian ini adalah :
1) Kapal dalam kondisi trim even keel (tidak terjadi perbedaan tinggi draft di haluan dan di buritan);
2) Kapal dalam kondisi keseimbangan yang stabil (stable equilibrium); dan 3) Kapal dalam kondisi kedap air.
kriteria yang IMO rekomendasikan. Kriteria yang dimaksud seperti ditunjukkan pada Gambar 29.
Gambar 29 Kurva stabilitas statis. Keterangan :
A : Luas area di bawah kurva stabilitas statis sampai sudut oleng 30º tidak
boleh kurang dari 0,055 meter radian;
B : Luas area di bawah kurva stabilitas statis sampai sudut oleng 40º tidak
boleh kurang dari 0,09 meter radian;
C : Luas area antara sudut oleng 30º sampai 40º tidak boleh kurang dari 0,03
meter radian, dimana ruangan di atas dek akan tenggelam dengan sudut keolengan tersebut.
D : Nilai maksimum righting lever (GZ) sebaiknya dicapai pada sudut tidak kurang dari 30º serta bernilai minimum 0,20 meter;
E : Sudut maksimum stabilitas sebaiknya lebih dari 25º;
F : Nilai initial GM tidak boleh kurang dari 0,35 meter.
3.3.4.4 Kaji ulang desain (redesign) Kapal PSP 01
Hasil perhitungan dan analisis data yang telah diperoleh digunakan sebagai basis data untuk melakukan kajian ulang pada desain Kapal PSP 01. Desain kapal saat ini dianggap belum ideal sebagai kapal static gear, sehingga dengan
Kapal PSP 01 dapat disempurnakan. Dalam melakukan redesign, parameter yang digunakan antara lain rasio dimensi utama, stabilitas, nilai LCB dan periode oleng.
Kriteria pemilihan desain yang paling ideal didasarkan pada kondisi
4 HASIL PENELITIAN
4.1 Deskripsi Kapal PSP 01
4.1.1 Spesifikasi teknis
Kapal PSP 01 merupakan kapal penangkap ikan yang dibangun dalam rangka pengembangan kompetensi Departemen Pemanfaatan Sumberdaya Perikanan FPIK IPB yaitu teaching farm industry berbasis perikanan tangkap. Kapal yang pembuatannya ditujukan bagi kepentingan riset (penelitian) dan usaha penangkapan ikan ini dibiayai oleh Program A3 dan resmi diluncurkan pada bulan Juni Tahun 2008. Keberadaan kapal ini sangat penting artinya baik bagi civitas akademika PSP maupun masyarakat nelayan di PPN Palabuhanratu. Adapun spesifikasi teknis Kapal PSP 01 seperti ditunjukkan pada Tabel 6.
Tabel 6 Spesifikasi teknis Kapal PSP 01
No. Keterangan
1.
5°
4.1.2 Daerah penangkapan
Operasi penangkapan ikan yang dilakukan menggunakan Kapal PSP 01 meliputi wilayah perairan Teluk Palabuhanratu hingga perairan Provinsi Banten. Daerah penangkapan ikan tuna berada di sekitar rumpon yang dipasang oleh nelayan. Sementara untuk fishing ground keong macan, daerah penangkapannya meliputi Perairan Karang Bolong, Ci Sokan, Ujung Genteng hingga mencapai Binuangen. Peta daerah penangkapan Kapal PSP 01 disajikan pada Gambar 30.
104°1'05" LAMPUNG BARAT
105°2'10" LAMPUNG TIMUR
106°3'15" 107°4'20" 108°5'25"
LAUT JAWA
TANGERANG BEKASI KARAWANG
CIANJUR MAJALENGKA
KOTA TASIKMALAY
104°1'05" 105°2'10" 106°3'15" 107°4'20" 108°5'25"
Keterangan :
Lokasi Penelitiaa
Peta Inset
# Lokasi Penangkapan
Sumber : Peta Rupa Bumi Indonesia Bakosurtanal 2007