BERBASIS PLC OMRON
TUGAS AKHIR
Laporan ini disusun untuk memenuhi salah satu syarat dalam menempuh pendidikan Program Sarjana di Jurusan Teknik Elektro
Disusun Oleh : Wida Pramudita
1.31.06.002
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
Tugas Akhir ini menjelaskan proses pengontrolan sebuah sistem lalulintas perkeretaapiaan dengan menggunakan PLC OMRON ZEN. Tujuan dari penulisan tugas akhir ini adalah untuk membuat sebuah aplikasi pengontrolan jalur lintasan kereta api berserta persinyalannya dengan menggunakan PLC OMRON ZEN secara otomatis. Penulis ingin mengetahui bagaimana PLC OMRON ZEN dapat mengontrol jalur lintasan kereta api agar dapat bergerak secara otomatis dengan melakukan pengujian yang dilakukan penulis menggunakan prototype pengontrolan jalur lintasan kereta api. Dari hasil pengujian yang dilakukan penulis dapat diketahui bahwa PLC OMRON ZEN 10C1AR-A-V1 memiliki kehandalan 80% dalam melakukan pengontrolan sistem ini.
This final project describes the process of controlling a railway of train
based on PLC OMRON. The aim of this paper is to create a simulation
application of a railway train control using OMRON ZEN PLC automatically.
Writer would like to know how PLC OMRON can control the railway of train that
can moves automatically by testing conducted by using a prototype of train. From
the testing that the writer can know OMRON ZEN PLC 10C1AR-A-V1 has a
reliability of 80% in the controlling system the railway of train
The design of the prototype based on railway of the train control PLC
OMRON was conducted in three stages. First, the design of software starts from
the description of a system and then addressing the components used to in a
language understandable by the PLC. Making the flowchart and truth table. The
second step began to enter the stage of making the computer program. In a
second step we tried to design hardware that is done by making the elevator
simulation. And the last stage is to do a merger between the software and
i
Puji syukur penulis panjatkan kehadirat Allah SWT yang telah memberikan rahmat, karunia dan hidayah-Nya, sehingga penulis dapat menyelesaikan tugas akhir ini tanpa mengalamai hambatan yang berarti. Karya tulis ini disusun untuk melengkapi salah satu syarat dalam salah satu syarat dalam menempuh pendidikan Program Sarjana di Jurusan Teknik Elektro
Tak ada gading yang tak retak, penulis pun menyadari bahwa tugas akhir ini jauh dari sempurna. Oleh karena itu, kritik dan saran yang membangun dari pembaca semua sangat penulis harapkan.
Penulis menyadari bahwa tugas akhir ini tidak akan tuntas tanpa bantuan dan dorongan dari berbagai pihak. Oleh sebab itu penulis ingin mengucapkan terima kasih kepada beberapa pihak yang telah membantu penulis dalam menyelesaikan tugas akhir ini
Ungkapan terima kasih ini ingin penulis sampaikan kepada :
1. Allah SWT yang telah memberikan kesehatan dan keselamatan ketika melaksanakan percobaan di lab sampai penyusunan laporan tugas akhir ini.
2. Kepada kedua orang tua penulis yang telah memberi dukungan baik secara moril dan materil serta doa restu beliau sehingga penulis dapat menyelesaikan tugas akhir ini
ii
5. Bapak Muhammad Aria, MT, selaku Ketua Jurusan Teknik Elektro UNIKOM dan dosen pembimbing penulis sekaligus yang memperkenalkan penulis dengan PLC dan mengajarkan banyak hal tentang PLC dan khususnya sistem kendali di dunia elektro
6. Ibu Tri Rahajoeningroem, MT, selaku dosen penguji dan dosen pengajar di Jurusan Teknik Elektro UNIKOM .
7. Bapak Bobi Kurniawan,ST., M.Kom selaku penguji dan sekaligus dosen di jurusan Teknik Elektro
8. Bapak Riyanto, MT., sebagai dosen sistem embedded yang membantu dalam menyelesaikan tugas akhir ini.
9. Seluruh bapak dan ibu dosen di Jurusan Teknik Elektro UNIKOM. 10. Seluruh rekan-rekan satu perjuangan di Teknik Elektro.
11. Kepada semua pihak yang tidak dapat disebutkan satu-persatu Harapan penulis semoga laporan kerja praktek ini dapat bermanfaat dan memberikan sedikit ilmu bagi para pembaca semua, Amin.
Bandung, Agustus 2011
1
PENDAHULUAN
1.1 Latar Belakang
Dewasa ini, dimana sistem transportasi sudah sedemikian pesatnya dan kebutuhan masyarakat sudah semakin meningkat akan sarana angkutan darat, maka kereta api merupakan salah satu alternatif yang menjanjikan untuk kebutuhan transportasi masyarakat dengan segala kelebihan yang dimilikinya. Selain merupakan alat transportasi yang murah, kecepatan dan ketepatan inilah yang menjadi latar belakang mengapa masyarakat memilih kereta api sebagai sarana transportasi mereka.
Karena mengingat banyaknya masyarakat yang mengandalkan alat transportasi ini, untuk itu jasa pelayanan ini sangat membutuhkan suatu sistem yang memiliki nilai keakurasian yang tinggi untuk menjamin setiap penumpangnya agak mereka merasa nyaman dan selamat sampai ke tujuan.
Berdasarkan hal tersebut diatas, terpikirkan penulis untuk membuat pengonrolan jalur perlintasan kereta api dengan berbasis PLC (Programmable Logic Controller). Karena PLC merupakan alat kontrol yang banyak digunakan di bidang industri dan merupakan alat kontrol dengan teknologi yang relatif lebih baru. Bahkan saat ini sistem perkeretaapian di Indonesia sekalipun tidak ada yang menggunakan PLC sebagai alat pengontrolannya.
1.2 Rumusan Masalah
Mengacu pada permasalahan yang diuraikan pada latar belakang, maka rumusan masalah dapat ditekankan pada :
a. Bagaimana rancang bangun pengontrolan jalur lintasan kereta api berbasis PLC OMRON.
b. Bagaimana cara memprogram PLC OMRON dengan menggunakan ladder diagram.
c. Bagaimana menguji pengontrolan jalur lintasan kereta api berbasis PLC OMRON.
1.3 Tujuan Penelitian
Tujuan pengontrolan jalur perlintasan kereta api berbasis PLC ini adalah: a. Mengetahui rancang bangun pengontrolan jalur lintasan kereta api
berbasis PLC OMRON.
b. Mengetahui cara memprogram PLC OMRON dengan menggunakan ladder diagram.
c. Mengetahui hasil pengujian pengontrolan jalur lintasan kereta api berbasis PLC OMRON.
1.4 Batasan Masalah
Dalam menyusun tugas akhir ini diperlukan suatu batasan masalah agar tidak menyimpang dari ruang lingkup yang akan dibahas. Adapun batasan masalahnya :
a. Pembahasan pengontrolan lintasan kereta api menggunakan PLC OMRON.
b. Pembahasan pemrograman PLC dengan menggunakan ladder diagram c. Dalam pengendalian kasus lintasan menggunakan 4 jalur yang di
kontrol.
d. Jalur 1 hanya dapat dilalui oleh kereta yang datang dari arah kiri ke arah kanan saja.
e. Jalur 4 hanya dapat dilalui oleh kereta yang datang dari arah kanan ke arah kiri.
Untuk mencapai tujuan yang diinginkan dari penulisan materi tugas akhir ini, maka penulis mengadakan kegiatan antara lain :
b. Membuat perancangan pengendalian PLC dalam beberapa struktur, serta membuat program dari setiap struktur pengendali PLC
c. Merancangan dan membangun prototipe yang akan dibuat d. Melakukan analisis hasil penelitian
1.6 Sistematika Penulisan
Secara garis besar pembahasan dari Perencanaan dan Pembuatan sistem ini terbagi dalam beberapa bab yaitu :
BAB I :Pendahuluan
Meliputi latar belakang, rumusan masalah, tujuan, batasan masalah, metodologi dan sistematika pembahasan.
BAB II :Dasar Teori
Berisi tentang teori dasar yang berhubungan dengan alat yang direncanakan.
BAB III :Perencanaan dan perancangan
Berisi tentang, perencanaan dan perancangan prototipe
BAB IV :Pengujian
Membahas tentang pengujian prototipe serta analisa hasil pengujian.
BAB V :Penutup
BAB II
LANDASAN TEORI
2.1 Pengenalan PLC
Definisi Programmable Logic Controller (PLC) menurut National
Electrical Manufactures Association(NEMA) adalah suatu alat elektronika digital
yang menggunakan memori yang dapat diprogram untuk menyimpan
instruksi-instruksi dari suatu fungsi tertentu seperti logika, sekuensial, pewaktu dan
aritmatika untuk mengendalikan suatu proses. Dengan pengertian lain PLC adalah
suatu alat kendali elektronika yang dapat diprogram dengan menggunakan fungsi
logika.
Sebelum otomatisasi industri berkembang, proses produksi menggunakan
mesin-mesin yang dikendalikan secara langsung oleh para pekerja atau operator.
Seiring dengan perkembangan waktu sistem kendali kemudian berkembang
dengan menggantikan sebagian tugas atau bahkan seluruh tugas kendali dengan
menggunakan sejumlah elemen mekanik atau listrik yang dihubungkan
sedemikian sehingga membentuk sistem kendali yang berfungsi permanen
(hardware control), sistem kendali tersebut kemudian disebut dengan sistem
kendali konvensional. Pada sistem kendali konvensional kompleksitas sambungan
antara elemen pembentuk sistem kendali sangat tergantung pada kompleksitas
konfigurasi elemen maupun pelacakan gangguan (trouble shooting) pada
kegagalan sistem sangat sulit dilakukan.
Pekembangan komponen mikro elektronika, terutama yang bersifat dapat
diprogram menghasilkan suatu sistem kendali elektronika yang sangat fleksibel.
Alat kendali yang dapat diprogram tersebut salah satunya adalah sistem kendali
berbasis logika relay yang kemudian disebut PLC (Programmable Logic
Controller).
Operasi PLC dalam pengendalian sistem terdiri dari tiga tahap yaitu :
1. Pembacaan kondisi input (Scaning Input)
2. Pemrosesan kondisi input sesuai dengan program yang ada di memori
3. Meng-update kondisi output untuk menggerakkan peralatan-peralatan
beban
Secara sederhana proses operasi PLC diatas dapat digambarkan sebagai berikut.
Urutan proses operasi tersebut akan dilakukan secara berulang. Satu urutan proses
lengkap disebut dengan satu waktu operasi (Time Cycle).
2.1.1 Fungsi PLC
Fungsi PLC dalam sebuah sistem kendali antara lain adalah sebagai
berikut :
A. Kontrol Sekuensial
a. Pengganti relay control logickonvensional.
b. Pewaktu.
c. Pencacah.
B. Kontrol Cerdas (canggih)
a. Operasi Aritmatika.
b. Penanganan informasi.
c. Control analog(suhu, tekanan, aliran, dan lain-lain.).
d. PID (proporsional integerator derivative).
e. Fungsi Logic.
C. Kontrol Pengawasan
a. Proses monitoringdan alert system.
2.1.2 Keuntungan Penggunaan PLC
Beberapa keuntungan penggunaan PLC dalam sistem kendali
dibandingkan dengan suatu sistem kendali konvensional, antara lain :
A. Instalasi sistem kendali
5. Konsumsi daya listrik relatif rendah.
6. Modifikasi sistem lebih sederhana.
b. Kendali Konvensional
1. Perawatan relatif komplek.
2. Komplek dalam pengoperasian.
3. Mahal dalam perawatan.
4. Pelacakan kesalahan sistem relatif sulit.
5. Konsumsi daya listrik relatif tinggi.
6. Modifikasi sistem membutuhkan waktu yang lama.
B. Keuntungan dari penggunaan PLC dalam otomasi, antara lain :
a. Waktu implementasi dapat dipersingkat.
b. Modifikasi sistem lebih mudah.
c. Proses operasi kendali dapat diubah dengan memodifikasi program,
perubahan dan penambahan operasi dapat dilakukan pada software.
e. Indikator kerja input dan output dengan cepat dan mudah dapat segera
diketahui.
f. Keandalan tinggi.
g. Perangkat kontroler standar industri.
2.1.3 Arsitektur PLC
Bagian utama PLC yaitu Central Processing Unit (CPU), Memory dan
Modul input/output serta port komunikasi untuk keperluan pemrograman yang
dapat dilakukan dengan menggunakan alat (programming unit). Pada beberapa
jenis PLC untuk keperluan pemrograman juga disediakan keypad dan screen.
Selain itu untuk keperluan operasinya PLC juga memiliki sumber catu daya
(power supply) yang akan mengubah tegangan AC menjadi tegangan yang sesuai
dengan yang dibutuhkan oleh komponen PLC.
Bagian-bagian PLC tersebut dapat digambarkan sebagai berikut.
2.1.3.1 Central Processor Unit
Central Processor Unit (CPU) mengatur dan mengawasi seluruh operasi
PLC sehingga respon PLC terhadap sistem yang dikontrol sangat tergantung pada
kecepatan CPU. PLC yang mampu melakukan operasi komplek pada kecepatan
tinggi pada umumnya mempunyai CPU yang dibentuk dari mikroprosessor
berkemampuan tinggi.
2.1.3.2 Memory
Memory PLC terdiri dari memory sistem operasi dan memory data.
Memory sistem operasi adalah memory tempat menyimpan program yang
mengendalikan operasi PLC. Memory data adalah memory untuk lokasi
penempatan program yang dibuat dan berfungsi sebagai buffer sementara atas
kondisi input/output dan status fungsi-fungsi internal PLC. Ada beberapa macam
tipe memori yang digunakan dalam PLC antara lain :
a. Random Acces Memory(RAM)
Random Acces Memory (RAM) adalah memory internal CPU, dimana isinya
dapat dimodifikasi dengan cepat dan secara berulang-ulang. RAM sering juga
disebut real-write memory karena data secara konstan dapat ditulis ke dalam
b. Read Only Memory(ROM)
Informasi yang ada didalam Read Only Memory (ROM) hanya dapat dibaca
saja. Informasi atau program dimasukkan kedalam ROM oleh pabrik pembuat
untuk keperluan operasi PLC antara lain untuk keperluan CPU dan untuk
keperluan pemrograman PLC.
2.1.3.3 Unit Input/Output (I/O)
Unit input/output merupakan sistem mikro elektronika. Unit input PLC
terdiri dari unit yang mampu mempresentasikan dua level sinyal 0 dan 1 (input
level logika) atau mempresentasikan sejumlah level sinyal secara linier (level
sinyal analog). Unit output yang umumnya digunakan untuk menggerakkan
actuator berfungsi sebagai saklar ON/OFF (output level logika) atau sebagai
penggerak yang level outputnya dapat diatur dalam jangkauan (range) dan
langkah (step) tertentu (output level analog).
Modul input akan mengirimkan parameter dan statusnya ke memory untuk
dapat diproses oleh CPU sesuai dengan parameter operasi program, hasilnya akan
dikirimkan kembali ke memory untuk mengupdate status output sesuai dengan
parameter atau status yang diperoleh dari CPU.
Jumlah input/output yang diidentifikasikan pada suatu PLC umumnya
bukan merupakan jumlah unit input/output yang terpasang, tetapi jumlah unit
input/output maksimum yang dapat ditangani oleh CPU. Unit input/output
umumnya dirancang modular agar penggunanya dapat disesuaikan dengan
2.1.4 Bahasa Pemrograman PLC (Ladder Diagram)
Ladder Diagram menggambarkan program dalam bentuk grafik. Diagram
ini dikembangkan dari kontak-kontak relay yang terstruktur yang menggambarkan
aliran arus listrik. Dalam diagram ladder terdapat dua buah garis vertical dimana
garis vertikal sebelah kiri dihubungkan dengan sumber tegangan positip catu daya
dan garis sebelah kanan dihubungkan dengan sumber tegangan negatip catu daya.
Program ladder ditulis menggunakan bentuk pictorial atau simbol yang
secara umum mirip dengan rangkaian kontrol relay. Program ditampilkan pada
layar dengan elemen-elemen seperti normally open contact, normally closed
contact, timer, counter, sequencerdan lain-lain ditampilkan seperti dalam bentuk
pictorial.
2.2 PLC OMRON 2.2.1 Jenis PLC OMRON
OMRON sebagai perusahaan besar memproduksi berbagai macam
peralatan, salah satunya memproduksi PLC. OMRON mengeluarkan beberapa
jenis PLC diantaranya adalah :
a. ZEN
b. Sysmac
c. CPM 1A
Dalam perancangan dan pembahasan laporan ini, PLC yang digunakan adalah
PLC OMRON typeZEN
2.2.2 ZEN
ZEN Programmable Relay merupakan produk PLC lain dari OMRON,
sebagaimana ditunjukan pada gambar 2.4 merupakan kontroler kecil yang
menyediakan 10 saluran input/output (I/O) yang dapat diprogram (terdiri dari 6
masukan dan 4 keluaran). Alat ini jauh lebih murah dibandingkan seri CPM1
maupun CPM2
Dalam kesempatan ini penulis menggunakan ZEN type LCD, yang dilengkapi
dengan LCD dan tombol-tombol operasi.Zen Programmable Relay berukuran
kecil dan ringan, untuk tipe 10 I/O ukurannya 90 x 70 x 56 mm dan dapat
dipasang dimana saja.
2.2.3 Fitur-fitur ZEN
1. Mudah diprogram, perangkat ZEN ini lebih mudah pengoperasianya
dibanding type CPM1.Terdapat 4 macam jenis keluaran yang dapat diatur
dengan mudah, meliputi : operasi normal, operasi SET, operasi RESET dan
operasi TOGGLE atau ALTERNATE.
2. Antisipasi kerusakan catu daya, ZEN memiliki bit-bit penyimpan dan
penyimpan pewaktu untuk antisipasi kerusakan catu daya. Bit-bit ini akan
menyimpan sebelum terjadi kerusakan.
Serta 3 jangkauan pengaturan pewaktu yaitu:
a. 0,01 hingga 99,99 detik.
b. 1 detik hingga 99 menit 59 detik.
4. Pencacah naik/turun dan komparator, selain memiliki pewaktu, ZEN juga
di lengkapi dengan 16 pencacah atau conter yang bisa diprogram naik
maupun turun.
5. Operasi pewaktu bergantung musim dan hari, Unit CPU dalam ZEN juga
memiliki fungsi kalender dan jam yang terdiri dari 16 pewaktu mingguan
dan 16 pewaktu kalender. Pengontrolan musiman dimungkinkan dengan
kombinasi pewaktu mingguan dan kalender tersebut. Cocok untuk
pengontrolan penyemprotan taman atau kebun.
6. Masukan analog langsung. Unit CPU dengan catu daya DC memiliki 2
masukan analog langsung (tegangan 0 hingga 10 volt) dan 4 komparator
analog.
7. Pembuatan diagram tangga menggunakan perangkat lunak, selain bisa
diprogram secara langsung, juga dapat diprogram dengan perangkat lunak
ZEN Suport Software, sebagaimana contoh tampilannya ditunjukan pada
Gambar 2.5.
ZEN Suport Software dapat digunakan untuk mengsimulasikan ZEN dan
memonitor program tangga secara langsung, sehingga dapat langsung
diamati cara kerja program tangga yang terkait.
2.2.4 Area Memory
a. Bit-bit I/O, Work dan Penyimpan Internal (Internal Holding).
Bit-bit keluaran/masukan atau I/O, kerja (Work) dan penyimpan internal
(Internal Holding) berikut dengan keterangan atau penjelasan
fungsi-fungsingya ditunjuk pada tabel 2.1.
Tabel 2.1Alokasi Bit-bit I/O, Ekspansi, Kerja dan Penyimpan Internal
Nama Tipe Alamat piranti masukan yang terhubung dengan terminal masukan unit ekspansi Hanya dapat digunakan untuk CPU tipe LCD digunakan dengan model catu daya 24 VDC
Gambar 2.6Tombol Tekan Pada ZEN
Tombol operasional (seperti DEL, ALT dan seterusnya) dapat digunakan
untuk operasional ZEN, tidak perduli apakah tombol-tombol yang bersangkutan
digunakan sebagai tombol tekan (B) atau tidak, dengan kata lain, saat suatu
tombol operasional, misalnya DEL ditekan (untuk opersional penghapusan) maka
tombol tekan B6 juga ON. Bit-bit keluaran tersebut mencakup bit-bit keluaran
terminal ZEN (Q), bit-bit keluaran terminal ekspansi ZEN (Y), bit-bit kerja (M)
dan bitbit tahan (H), penggambarannya pada diagram tangga baik pada perangkat
lunak ZEN Support Software maupun tampilan LCD
b. Pewaktu dan Pencacah
Pada ZEN Programmable Relay terdapat 2 macam pewaktu, yaitu pewaktu
(timer) dan pewaktu tahan (Holding Timer) dengan perbedaan sebagai berikut:
a. Pewaktu : nilai pewaktu saat ini akan di-reset saat pewaktu diubah dari
mode RUN ke mode STOP atau catu daya ZEN dimatikan. Terdapat 4
macam operasional pewaktu jenis ini, yaitu: tundaan ON (X), tundaan
b. Pewaktu tahan : nilai pewaktu saat ini akan disimpan walaupun terjadi
pengubahan mode RUN menjadi STOP atau catu daya dimatikan. Pewaktu
akan dilanjutkan kembali jika masukan pemicu ON, selain itu status ON
pada bit pewaktu tahan ini akan disimpan jika waktu yang dikehendaki
sudah selesai. Bit peaktu tahan ini hanya bias beroperasi dengan fungsi
tundaan ON saja.
c. Pencacah : terdapat 16 pencacah yang dapat digunakan dalam mode naik
(increment) maupun turun (decrement). Nilai saat ini dari pencacah akan
disimpan jika mode ZEN diubah atau catu daya dimatikan. Bit pencacah
akan ON jika nilai cacah sudah melampaui yang ditentukan (nilai saat ini
e” nilai yang ditentukan). Nilai pencacah kembali ke 0 dan bit pewaktu
akan OFF jika direset, sebagaimana bit-bit pewaktu, pewaktu tahan dan
pencacah.
c. Bit-bit Penampilan.
Suatu pesan yang dibuat oleh pengguna, jam, nilai pewaktu atau pencacah saat
ini atau nilai kenversi analog dapat ditampilkan pada layar LCD, jika
digunakan fungsi tampilan (D) dan jika sigunakan lebih dari satu, maka satu
layar dapat menampilkan beberapa data atau pesan sekaligus.
2.2.5 Langkah Pembuatan Program PLC OMRON ZEN
PLC OMRON ZEN yang digunakan dalam “PENGONTROLAN
ELEVATOR BERBASIS PLC OMRON ZEN” ini menggunakan bahasa
Untuk membuat program tersebut penulis menggunakan ZEN Support
Software yang dapat berjalan pada sistem operasi windows. Software tersebut
digunakan penulis karena selain bias berjalan dalam sistem operasi windows juga
bias melakukan simulasi jalannya program yang telah dibuat secara langsung pada
komputer tanpa harus terkoneksi dengan modul PLC. Hal tersebut dirasakan
sangat menguntungkan karena kesalahan program dapat diketahui dengan lebih
awal.
Langkah pembuatan program dengan ZEN Support Software tersebut
adalah sebagai berikut :
A. Menjalankan Aplikasi ZEN Support Software
Dari sistem operasi jalankan Aplikasi ZEN Support Software dan terlihat
tampilan antar muka aplikasi seperti gambar dibawah.
B. Menggunakan Fungsi-fungsi Program dalam aplikasi ZEN Support
Software
Fungsi program tersebut adalah :
a. Fungsi Ladder
Fungsi Ladder berisi alamat input dan output yang biasa digunakan
Fungsi Ladder terdiri dari I0 s/d I5, Q0 s/d Q3, X0 s/d Xb, Y0 s/d Yb,
M0 s/d Mf, T0 s/d Tf, C0 s/d Cf, P0 s/d Pf
b. Fungsi Simulator
Fungsi Simulator berisi pilihan fungsi untuk RUN, STOP, ZEN Image
Display, Present Value List Display, Clock Display, Start/Stop
Simulator
C. Mensimulasikan Program
Salah satu fasilitas yang ada dalam aplikasi ini adalah fasilitas untuk
mensimulasikan program yang telah dibuat secara langsung pada
komputer tanpa harus terhubung terlebih dahulu dengan PLC, hal ini
sangat membantu untuk melihat jalannya program dan sekaligus
mengetahui kesalahan pada program secara lebih dini meskipun tidak
Gambar 2.8Tampilan Aplikasi ZEN Support Softwarepada saat dilakukan Simulasi Program
D. Overview Program
Overview program digunakan untuk melihat program yang telah dibuat
secara keseluruhan dalam bentuk grafis dan dapat digunakan dalam
melakukan pengecekan lokasi kesalahan program maupun untuk kepentingan
Gambar 2.9Tampilan Aplikasi ZEN Support Software pada saat Overview Program
E. Upload Program
Setelah program selesai dibuat dan di uji dengan menggunakan software,
selanjutnya program akan dimasukkan (ditransfer) kedalam modul PLC. Proses
pengisian program ke modul PLC OMRON ZEN dapat dilakukan dengan cara
melakukan Upload program dari PC ke Modul PLC ZEN dengan menggunakan
2.3 Lintasan Kereta Api
Dalam sistem lintasan kereta api ada empat komponen utama yang
berguna untuk mengendalikan arus lalulintas perkeretaapian. Beberapa komponen
tersebut adalah :
a. Rel
b. Mesin Penggerak Rel (Wesel)
c. Lampu Sinyal
d. Kontrol Sistem
Keempat komponen utama tersebuta memiliki fungsi yang sangat penting, satu
dari keempat itu mengalami kerusakan maka akan berakibat sangat berbahaya
dalam menjamin keselamatan para penumpang.
2.3.1 Rel
Jika kendaraan lain memiliki sistem kemudi untuk mengendaliakan arah
tujuan yang akan dilalui sedangkan kereta api tidak memiliki kemudi untuk
mengendalikannya, kereta api hanya mengandalkan rel untuk bergerak ke kanan,
ke kiri atau lurus. Untuk itu dibutuhkan suatu alat pembantu untuk mengendalikan
laju kereta agar selalu ada di jalur yang benar untuk itu dibutuhkan rel untuk
mengendalikannya. Rel merupakan dua batang besi baja kaku yang sama panjang
dipasang pada bantalan sebagai dasar landasan. Rel-rel tersebut diikat pada
bantalan dengan menggunakan paku rel atau sekrup penambat. Jenis penambat
yang digunakan bergantung kepada jenis bantalan yang digunakan. Puku ulir atau
digunakan untuk bantalan beton atau semen. Rel biasanya dipasang di atas badan
jalan yang dilapis dengan batu kericak atau dikenal sebagai Balast. Balast
berfungsi pada rel kereta api untuk meredam getaran dan lenturan rel akibat
beratnya kereta api. Untuk menyeberangi jembatan, digunakan bantalan kayu
yang lebih elastis ketimbang bantalan beton.
Gambar 2.10Rel
2.3.2 Mesin Penggerak Rel (Wesel)
Wesel adalah konstruksi rel kereta api yang bercabang
(bersimpangan) tempat memindahkan jurusan jalan kereta api. Wesel terdiri dari
sepasang rel yang ujungnya diruncingkan sehingga dapat melancarkan
perpindahan kereta api dari jalur yang satu ke jalur yang lain dengan menggeser
bagian rel yang runcing. Kereta api berjalan mengikuti rel, sehingga kalau relnya
digeser maka kereta api juga mengikutinya. Untuk memindahkan rel, digunakan
Lidah wesel adalah bagian yang menentukan arah gerak roda. Sepasang
lidah dihubungkan dengan sebuah batang besi sehingga gerak sepasang lidah
tersebut bersama-sama. Jika lidah menempel pada rel kiri maka pada rel kanan
lidah akan memberi celah untuk roda lewat. Demikian juga sebaliknya.
Bagian lain dari wesel, yaitu hati wesel merupakan bagian tetap yang tidak
bisa digerakkan dan dibiarkan mempunyai celah agar flens roda dapat
melewatinya. Bagian ini terkena hentakan roda akibat adanya celah yang
disediakan bagi flens roda. Karena itu hati wesel biasanya dibuat dari baja
(mangan steel) agar bertahan lama. Bagian ujung dari hati wesel dibuat lebih
rendah 8 mm dari permukaan rel dan hanya menyangga bagian sisi dari flens roda.
Bidang jalan roda menginjak rel sayap tanpa menyentuh ujung hati wesel. Seteleh
roda berada pada bagian hati wesel yang mempunyai lebar sekitar 70 mm barulah
beban roda kembali ditopang oleh hati wesel.
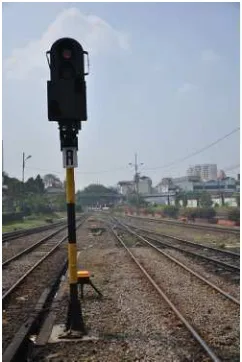
2.3.3 Lampu Sinyal
Lampu sinyal adalah sebuah alat komunikasi yang mengisyaratkan
sejumlah kode-kode tertentu dengan menggunakan cahaya. Persinyalan kereta api
adalah seperangkat fasilitas yang berfungsi untuk memberikan isyarat berupa
bentuk, warna atau cahaya yang ditempatkan pada suatu tempat tertentu dan
memberikan isyarat dengan arti tertentu untuk mengatur dan mengontrol
pengoperasian kereta api. Lampu-lampu ini juga menggunakan warna-warna yang
sama seperti lampu lalu lintas pada umumnya. Untuk menghindari bola lampu
putus, biasanya digunakan dua pasang lampu atau setiap aspek dipasangi 2 lampu
sedangkan perkembangan terakhir yang sudah mulai digunakan di Indonesia
adalah penggunaan lampu LED.
Gambar 2.12 Lampu Sinyal
2.3.4 Track Circuit
Track Circuit atau meja pelayanan adalah merupakan tempat di mana
persinyalannya. track circuit hanya berupa meja besar yang di atasnya terdapat
tombol-tombol panel untuk menggerakan wesel-wesel. Dari track circuit terpantau
semua keadaan-keadaan yang terjadi di lapangan. Kondisi wesel serta ada atau
tidak adanya kereta bisa terpantau dari sini
Gambar 2.13 Track circuit
Track circuit terbentuk oleh bagian jalan kereta api, yang dibuat hampir
mirip dengan kondisi di lapangan. Segala perlengkapan yang menunjang keamana
kereta api terdapat pada track circuit. Pada indikator rel di track circuit dinyatan
dengan dua warna garis, yakni garis berwarna merah dan garis berwarna kuning.
Garis berwarna merah menandakan ada kereta yang sedang melintas pada rel
tersebut atau ada kereta yang sedang berada diam pada rel, sedangkan warna
kuning pada menyatakan tidak ada kereta yang melintas atau berada pada rel
tersebut. Ini disebabkan karena rel di aliri oleh arus listrik guna mengetahui ada
atau tidaknya kereta di jalur tersebut. Arah pergerakan wesel pun dapat terlihat
dengan di tandainya lampu yang menyala menandakan kemana arah mesel itu
2.3.5 Kontol Sistem
Untuk mengendalikan semua komponen-komponen tersebut dibutuhkan
sebuah suatu alat kontrol sistem yang dapat mengatur semua
komponen-komponen utama tersebut. Dalam sistem kontrol perkeretaapian di Indonesia
sistem kontrol yang digunakan adalah Siemens DRS 60. Pada prinsipnya DRS
60 ini adalah suatu alat kontrol yang masih berupa relay-relay besar. Alat ini
dibuat di Jerman pada tahun 1960an, alat ini digunakan di Indonesia pada
tahun 1970an tapi baru beroperasi pada tahun 1971. Hanya dua daerah saja
yang masih menggunakan alat ini, hanya stasiun Bandung dan stasiun Solo.
Ini meruapakan sistem penngontrol pertama yang digunakan dalam sistem
perkeretaapian di Indonesia. DRS 60 tidak hanya mengatur sinyal saja tapi
juga mengatur seluruh sistem perkeretaapian.
Gambar 2.14Siemens DRS60
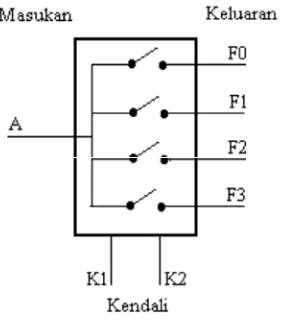
2.4 Demultiplekser
Demultiplekser adalah suatu rangkaian elektronik yang mampu
menyalurkan sinyal dari suatu saluran ke salah satu dari banyak saluran
keluaran. Pemilihan keluaran ini dilakukan melalui masukan penyeleksi.
Gambar 2.15Rangkaian Dasar Demultiplekser
Cara Demultiplekser melewatkan sinyal tidak selamanya seperti yang
diuraikan diatas. Ada kalanya sebuah demultiplekser hanya mengaktifkan satu
dari sekian saluran keluaran, yang kebanyakan aktif rendah. Dalam hal ini
demultiplekser hanya memiliki fasilitas "n" kendali masukan untuk memilih
satu dari 2n saluran keluaran.
2.5 Flowchart
Flowchart adalah penggambaran secara grafik dari langkah-langkah dan
urut-urutan prosedur dari suatu program. Flowchart menolong analis dan
programmer untuk memecahkan masalah kedalam segmen-segmen yang lebih
kecil dan menolong dalam menganalisis alternatif-alternatif lain dalam
pengoperasian. Flowchart biasanya mempermudah penyelesaian suatu masalah
khususnya masalah yang perlu dipelajari dan dievaluasi lebih lanjut.
Bila seorang analis dan programmer akan membuat flowchart, ada
beberapa petunjuk yang harus diperhatikan, seperti :
a. Flowchart digambarkan dari halaman atas ke bawah dan dari kiri ke kanan.
b. Aktivitas yang digambarkan harus didefinisikan secara hati-hati dan
definisi ini harus dapat dimengerti oleh pembacanya.
c. Kapan aktivitas dimulai dan berakhir harus ditentukan secara jelas.
d. Setiap langkah dari aktivitas harus diuraikan dengan menggunakan
deskripsi kata kerja, misalkan MENGHITUNG PAJAK PENJUALAN.
e. Setiap langkah dari aktivitas harus berada pada urutan yang benar.
f. Lingkup dan range dari aktifitas yang sedang digambarkan harus ditelusuri
dengan hati-hati. Percabangan-percabangan yang memotong aktivitas yang
sedang digambarkan tidak perlu digambarkan pada flowchart yang sama.
Simbol konektor harus digunakan dan percabangannya diletakan pada
halaman yang terpisah atau hilangkan seluruhnya bila percabangannya
tidak berkaitan dengan sistem.
Flowchart terbagi atas lima jenis, yaitu :
a. Flowchart Sistem (System Flowchart)
b. Flowchart Paperwork / Flowchart Dokumen (Document Flowchart)
c. Flowchart Skematik (Schematic Flowchart)
d. Flowchart Program (Program Flowchart)
BAB III
PERANCANGAN DAN REALISASI
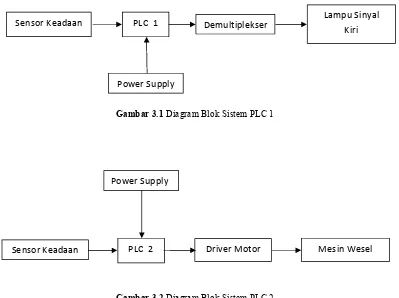
3.1 Perancangan Diagram Blok Sistem
Dalam perancangan ini menggunakan tiga buah PLC untuk mengatur seluruh sistem. PLC pertama mengatur pergerakan wesel-wesel sedangkan PLC kedua dan ketiga mengatur seluruh sistem lampu sinyal. Berikut adalah gambar blok diagram dari sistem yang akan di realisasikan.
Gambar 3.1Diagram Blok Sistem PLC 1
Gambar 3.2Diagram Blok Sistem PLC 2 Sensor Keadaan PLC 1 Demultiplekser
Power Supply
Lampu Sinyal Kiri
Sensor Keadaan PLC 2 Power Supply
Gambar 3.3Diagram Blok Sistem PLC 3
PLC pertama menentukan tujuan dan mengatur seluruh pergerakan wesel-wesel sesuai dengan wesel yang akan dilewati oleh kereta. PLC 1 menjadikan sensor keadaan menjadi input untuk memproses program yang dibuat. Pada prinsipnya PLC 1, PLC 2 dan PLC 3 memiliki kesamaan yaitu menjadikan sensor keadaan sebagai inputan, tetapi output yang di kontrolnya berbeda. Jika pada PLC 1 yang di kotrolnya adalah wesel-wesel maka pada PLC 2 dan PLC 3 mengkontrol seluruh lampu sinyal.
3.2 Perancangan Perangkat Keras (hardware)
Perancanagn perangkat keras meliputi beberapa alat atau komponen yang digunakan dalam perancangan PENGONTROLAN LINTASAN KERETA API BERBASIS PLC OMRON tersebut adalah :
3.2.1 Rel
Jika kendaraan lain memiliki sistem kemudi untuk mengendaliakan arah tujuan yang akan dilalui sedangkan kereta api tidak memiliki kemudi untuk mengendalikannya, kereta api hanya mengandalkan rel untuk bergerak ke kanan, ke kiri atau lurus. Rel merupakan faktor penting guna kelancaran perjalanan
Sensor Keadaan PLC 3 Demultiplekser Lampu Sinyal Kanan
kereta api. Biasanya rel hanya memanjang dari stasiun ke stasiun yang lain tetapi menjadi suatu masalah apabila ada kereta api lain yang ingin memasuki jalur yang sama. Untuk itu di buat suatu perlintasan rel yang bercabang dari satu arah ke dua arah. Istilah rel bercabang itu disebut wesel.
Gambar 3.4Rancangan Jalur Lintasan
Terdapat empat jalur lintasan kereta api yang memiliki dua jalur kedatangan dan dua jalur keberangkatan. Digunakannya empat jalur dan double trackdikedua sisi untuk mengurangi tumpukan penumpang di stasiun
3.2.2 Penggerak Rel (Wesel)
( a )
( b )
Gambar 3.5(a) Skema wesel ketika arah lurus, (b) skema wesel ketika arah belok
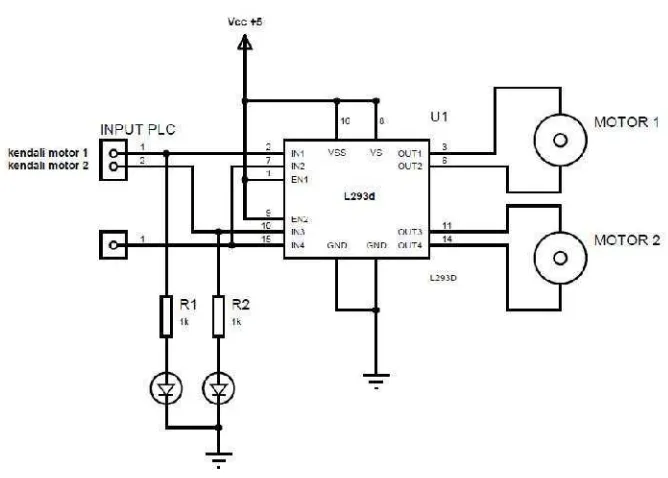
Mesin wessel di gerakan dengan menggunakan motor dc 5 volt dan untuk membantu pergerakannya ditambahkan sebuah gearbox agar kinerja dari motor lebih efisien dalam menggerakan lidah rel. Dalam sistem ini digunakan 12 mesin wessel yang di pasang dalam setiap persimpangan.
Gambar 3.7gambar rangkaian motor dc dengan menggunakan driver motor L293D
Gambar 3.8Skema wesel-wesel yang akan dikontrol
Tabel 3.1Tabel Kebenaran Gerak Wesel Apabila Kereta Datang Dari Arah Kiri
Arah Kedatangan
Jalur Tujuan
Kondisi Wesel
W2 W3 W4 W5 W6
-Tabel 3.2Tabel Kebenaran Gerak Wesel Apabila Kereta Datang Dari Arah Kanan
Arah
Kedatangan Jalur Tujuan
Kondisi Wesel
W7 W8 W9 W10 W11 Kanan Jalur 2 - Lurus - Belok Belok Kanan Jalur 3 Lurus - Lurus - Lurus Kanan Jalur 4 Belok - Lurus - Lurus
o
Tabel 3.3Tabel Kebenaran Gerak Wesel Apabila Kereta Akan Keluar Dari Arah Kiri Ke Kanan
Arah Kiri Ke Kanan Jalur 1 - Belok - Lurus Lurus Kiri Ke Kanan Jalur 2 - Lurus - Lurus Lurus Kiri Ke Kanan Jalur 3 Lurus - Belok - Belok
Tabel 3.4Tabel Kebenaran Gerak Wesel Apabila Kereta Akan Keluar Dari Arah Kanan Ke Kiri
Arah Kanan Ke Kiri Jalur 2 Belok - Belok - Lurus Kanan Ke Kiri Jalur 3 Lurus Lurus - Lurus -Kanan Ke Kiri Jalur 4 Lurus Lurus - Belok
-3.2.3 Lampu Sinyal
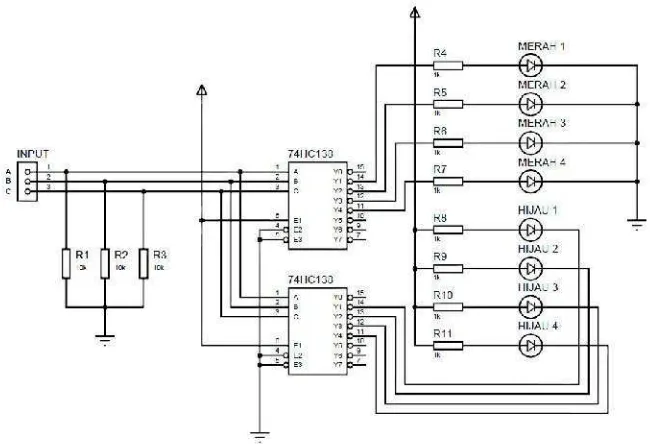
dalam sistem lalulintas perkeretaapian hanya memiliki dua kode warna saja yaitu merah untuk menandakan berhenti dan hijau untuk menandakan jalan terus. Bahkan dalam beberapa kasus ada yang memiliki sampai empat kode warna dalam satu lampu sinyal, namun dalam tugas akhir ini jumlah kode warna yang digunakan hanya dua warna saja. Lampu sinyal ini berperan sangat penting untuk menghindari adanya kecelakaan antar kereta.
Dalam perancangan ini, lampu sinyal terdiri dari dua jenis, yaitu sinyal kedatangan dan sinyal keberangkatan. Sinyal kedatangan adalah lampu sinyal yang berada pada jalur yang hendak masuk ke suatu stasiun atau sistem lintasan yang bercabang. Sedangkan sinyal keberangkatan adalah lampu sinyal yang berada pada jalur ke arah keluar dari suatu stasiun atau sistem lintasan yang bercabang. Dalam sistem yang akan direalisasikan ada dua buah lampu sinyal kedatangan yaitu L1 dan L8 sedangakan sinyal keberangkatan ada enam buah yaitu L2, L3 dan L4 dibagian kiri dan L5, L6 dan L,7 dibagian kanan
Gambar 3.9Rangkaian lampu sinyal
Gambar 3.10Skema penempatan lampu sinyal
lampu merah akan kembali menyala dan lampu hijau akan mati. Sedangkan lampu sinyal keberangkatan masih menggunakan sistem manual yaitu dengan menggunakan operator, dikarenakan ada tidak semua kereta akan berhenti di suatu stasiun.
3.2.4 Sensor Keadaan
Karena sistem yang akan dibuat menggunakan sudah dapat bekerja secara otomatis untuk itu dibutuhkan suatu sensor sebagai parameter untuk sensor agar dapat bekerja tanpa menggunakan operator. Sensor yang digunakan hanya analogi sebuah saklar biasa. Sebenarnya rel-rel kereta api yang ada di Indonesia semuanya dialiri arus listrik, namun arus yang dialirkannya memiliki tegangan yang tidak terlalu besar hanya sekitar 8-10 volt AC. Dua buah rel di sebelah kanan dan sebelah kiri memiliki kutub yang berbeda, apabila kutub tersebut di hubungkan maka lampu indikator di track circuit akan menyala. Karena roda kereta terbuat dari besi yang merupakan konduktor maka kedua kutub yang dihubungkan oleh roda kereta akan short yang menyebabkan indikator di track circuit akan menyala.
Gambar 3.12Skema pemasangan sensor keadaan
3.2.5 Modul PLC OMRON ZEN
Sesuai dengan judul maka sistem pengontrolan yang digunakan berbasis PLC OMRON ZEN.
Gambar 3.13PLC OMRON ZEN
Tabel 3.5Daftar pin input yang digunakan oleh PLC 1
No PIN
INPUT Fungsi
1 I0 Sensor kedatangan kiri 2 I1 Sensor keberangkatan jalur 4 3 I2 Sensor keberangkatan jalur 3 4 I3 Sensor keberangkatan jalur 2 5 I4 Sensor kedatangan kanan
Tabel 3.6Daftar pin output yang digunakan oleh PLC 1
No PIN OUTPUT Fungsi
1 Q0 Sebagai input A ke demultiplekser 1 2 Q1 Sebagai input B ke demultiplekser 1 3 Q2 Sebagai input C ke demultiplekser 1 4 Q3 Kontrol motor ke kondisi awal
Tabel 3.7Daftar pin input yang digunakan oleh PLC 2
No PIN
INPUT Fungsi
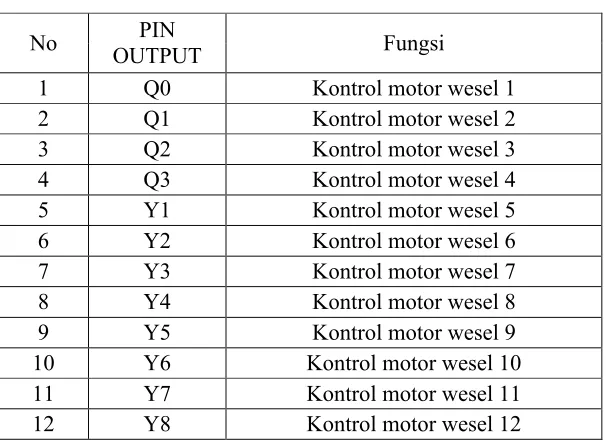
Tabel 3.8Daftar pin output yang digunakan oleh PLC 2
No PIN
OUTPUT Fungsi
1 Q0 Kontrol motor wesel 1 2 Q1 Kontrol motor wesel 2 3 Q2 Kontrol motor wesel 3 4 Q3 Kontrol motor wesel 4 5 Y1 Kontrol motor wesel 5 6 Y2 Kontrol motor wesel 6 7 Y3 Kontrol motor wesel 7 8 Y4 Kontrol motor wesel 8 9 Y5 Kontrol motor wesel 9 10 Y6 Kontrol motor wesel 10 11 Y7 Kontrol motor wesel 11 12 Y8 Kontrol motor wesel 12
Tabel 3.7Daftar pin input yang digunakan oleh PLC 3
No PIN INPUT Fungsi
1 I0 Sensor kedatangan kanan 2 I1 Sensor keberangkatan jalur 1 3 I2 Sensor keberangkatan jalur 2 4 I3 Sensor keberangkatan jalur 3 5 I4 Sensor kedatangan kiri
Tabel 3.8Daftar pin output yang digunakan oleh PLC 2
No PIN OUTPUT Fungsi
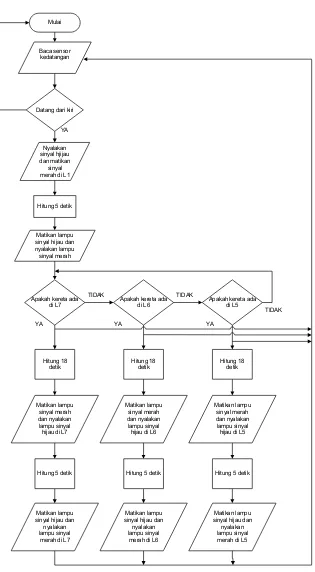
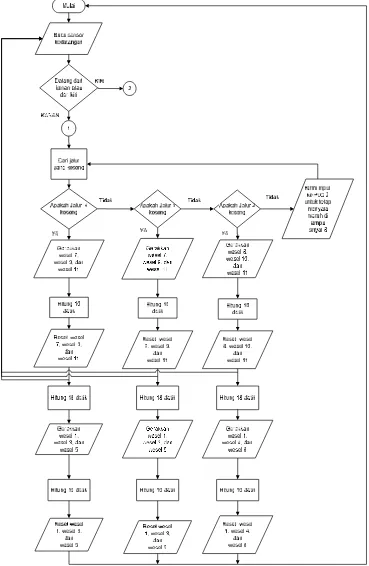
3.3 Algoritma Program
detik Hitung 18 detik Hitung 18 detik
Hitung 5 detik Hitung 5 detik
Hitung 5 detik Hitung 5 detik
Mulai
detik Hitung 18 detik Hitung 18 detik
Hitung 5 detik Hitung 5 detik
Hitung 5 detik Hitung 5 detik
3.4 ZEN Suport Software
PLC OMRON ZEN yang digunakan dalam “PENGONTROLAN JALUR LINTASAN KERETA API BERBASIS PLC OMRON” ini menggunakan bahasa pemrograman LLD (Ladder Logic Diagram).
Untuk membuat program tersebut penulis menggunakan ZEN Support Software yang dapat berjalan pada sistem operasi windows. Software tersebut digunakan penulis karena selain bias berjalan dalam sistem operasi windows juga bias melakukan simulasi jalannya program yang telah dibuat secara langsung pada komputer tanpa harus terkoneksi dengan modul PLC. Hal tersebut dirasakan sangat menguntungkan karena kesalahan program dapat diketahui dengan lebih awal.
BAB IV
PENGUJIAN DAN ANALISA
4.1. Tujuan
Langkah pengujian bertujuan untuk mendapatkan data-data sejauh mana sistem berfungsi sesuai dengan rancangan serta mengetahui letak kesalahan bila sistem yang dibuat ternyata tidak sesuai dengan yang diharapkan dan selanjutnya mengambil kesimpulan terhadap langkah-langkah yang harus diambil dalam rangka memperbaiki kesalahan tersebut.
Pengujian dilakukan dengan mengoperasikan secara langsung terhadap sistem yang sudah terinstalasi.
4.2. Kondisi-Kondisi Pengujian dan Analisa
4.2.1 Pengujian dan Analisa Kondisi 1
Pada awalnya semua posisi wesel berada pada posisi lurus dan apabila PLC mendapatkan input dari sensor maka secara otomatis PLC akan mengatur seluruh pergerakan wesel yang akan dilalui oleh kereta.
Gambar 4.1Kondisi awal
menuju jalur keluar akan secara otomatis akan terbentuk. Wesel-wesel yang dilewati adalah wesel 8, wesel 10 dan wesel 12, dalam kondisi seperti ini wesel 10 dan wesel 12 akan tetap diam sedangkan wesel 8 akan bergerak ke belok agar kereta yang akan melewatinya bisa bergerak kearah jalur keluar.
Gambar 4.2Kereta datang dari sebelah kiri kondisi semua jalur kosong
maka lampu sinyal L6 akan kembali memberi sinyal merah dan semua wesel yang dilewati dari jalur 2 akan menuju kearah jalur keluar.
Gambar 4.3Kereta datang dari sebelah kiri kondisi semua jalur 1 terisi
Gambar 4.4Kereta datang dari sebelah kiri kondisi semua jalur 1 dan 2 terisi
Table 4.1Tabel pengujian wesel kondisi 1 kereta masuk
Kondisi Jalur Jalur Tujuan
Wesel
1 2 3 4 5 6
Semua Jalur
Jalur 1 - Lurus - Lurus - Belok Kosong
Jalur 1 Terisi Jalur 2 - Lurus - Lurus - Lurus Jalur 1 dan Jalur 2
Jalur 3 - Belok Belok - Lurus -Terisi
(b)
(c)
Gambar 4.5(a) wesel 6 belok menuju jalur 1, (b) semua wesel lurus menuju jalur 2, (c) wesel 2 dan wesel 3 belok menuju jalur 3
Table 4.2Tabel pengujian lampu sinyal L8 kereta masuk dari kiri
Kondisi Jalur Kondisi Awal
Kondisi Sensor Aktif Merah Hijau Merah Hijau Jalur 1, Jalur 2 dan Jalur 3 Kosong Menyala Mati Mati Menyala
Table 4.3Tabel pengujian wesel kondisi 1 kereta keluar ke kanan
Arah Keberangkatan
Jalur Keberadaan
Kereta
Kondisi Wesel
7 8 9 10 11 12
Kiri Ke Kanan Jalur 1 - Belok - Lurus - Lurus Kiri Ke Kanan Jalur 2 - Lurus - Lurus - Lurus Kiri Ke Kanan Jalur 3 Lurus - Belok - - Belok
(a)
(b)
(c)
Table 4.4Tabel pengujian lampu sinyal kondisi 1 kereta keluar
Lampu Sinyal Kondisi Awal Setelah 18 Detik Merah Hijau Merah Hijau L2 Menyala Mati Mati Menyala L3 Menyala Mati Mati Menyala L4 Menyala Mati Mati Menyala
Dari data hasil pengujian yang didapatkan dapat dianalisa bahwa sistem dapat menentukan jalur mana yang akan dilalui oleh kereta dan jalur mana yang sedang digunakan oleh kereta yang lainnya. Sistem yang di buat secara otomatis menggerakan wesel-wesel yang akan dilalui oleh kereta dan membuka dan menutup lampu sinyal untuk memberikan tanda aman kepada masinis yang mengendalikan kereta agar dapat bergerak sesuai dengan jalur yang telah ditentukan oleh sistem.
4.2.2 Pengujian dan Analisa Kondisi 2
maka akan terjadi reset wesel dimana wesel-wesel yang bergerak akan kembali ke kondisi awal yaitu kondisi lurus. Setelah masuk ke jalur 4 maka kereta akan berhenti karena lampu sinyal L2 akan tetap memberi sinyal merah. Setelah kereta berhenti tepat di sensor keadaan maka sistem akan menghitung selama 18 detik. Waktu 18 detik dianalogikan sebagai waktu kereta dapat menaikan atau menurunkan penumpang. Setelah 18 detik maka lampu sinyal L2 akan memberi sinyal hijau agar kereta dapat bergerak melanjutkan perjalanan. Secara bersamaan wesel-wesel yang akan dilalui kereta menuju jalur keluar akan secara otomatis akan terbentuk. Wesel-wesel yang dilewati adalah wesel 5, wesel 3 dan wesel 1, dalam kondisi seperti ini wesel 1 dan wesel 3 akan tetap diam sedangkan wesel 5 akan bergerak ke belok agar kereta yang akan melewatinya bisa bergerak kearah jalur keluar keluar.
Jika kondisi jalur 4 terisi oleh kereta lain sedangkan ada kereta yang akan masuk kembali ke stasiun maka kereta akan di arahkan oleh sistem menuju jalur 3 karena jalur 4 sedang di gunakan oleh kereta yang lain. Ketika sensor kedatangan sedang dilewati maka lampu sinyal L8 akan memberi sinyal hijau dan apabila kereta telah melewati lampu sinyal lampu sinyal L8 akan kembali memberi sinyal merah. Kondisi wesel yang akan dilalui seperti wesel 7, wesel 9 dan wesel 11 tidak akan bergerak karena dari arah kedatangan menuju jalur 3 tidak ada persimpangan yang mengharuskan untuk berbelok jadi semua wesel tetap pada posisi lurus. Setelah kereta menginjak sensor keberangkatan di L3 maka sistem akan menghitung selama 18 detik dan lampu sinyal L3 tetap merah. Setelah 18 detik maka lampu sinyal L3 akan memberi sinyal hijau dan setelah kereta melewati lampu sinyal L3 maka lampu sinyal L3 akan kembali memberi sinyal merah dan semua wesel yang dilewati dari jalur 3 akan menuju kearah jalur keluar.
Jika dalam kondisi jalur 4 dan jalur 3 sedang digunakan oleh kereta lain maka kereta yang akan masuk ke stasiun akan masuk ke jalur 2. Lampu sinyal L8 akan memberi sinyal hijau dan akan kembali merah apabila kereta telah melalui lampu sinyal L8. Dan wesel-wesel yang akan dilalui seperti wesel 8, wesel 10 dan wesel 11 akan membuka jalan menuju jalur 2. Wesel 11 dan wesel 10 akan berbelok sedangkan wesel 8 akan tetap lurus. Setelah kereta menginjak sensor keberangkatan di L4 maka sistem akan menghitung selama 18 detik dan lampu sinyal L4 tetap merah. Setelah 18 detik maka lampu sinyal L4 akan memberi sinyal hijau dan setelah kereta melewati lampu sinyal L4 maka lampu sinyal L4 akan kembali memberi sinyal merah. Wesel-wesel yang akan dilalui oleh kereta seperti wesel 1, wesel 4 dan wesel 6 akan menuntun kereta agar dapat menuju kearah jalur keluar. Wesel 1 dan wesel 4 akan berbelok sedangkan wesel 6 akan tetap lurus. Berikut adalah hasil data setiap pengujian yang dilakukan.
Table 4.5Tabel pengujian wesel kondisi 2 kereta masuk
Kondisi Jalur Jalur Tujuan Wesel
7 8 9 10 11 12
Semua Jalur
Jalur 4 Belok - Lurus - Lurus -Kosong
Jalur 4 Terisi Jalur 3 Lurus - Lurus - Lurus -Jalur 4 dan -Jalur 3
Jalur 2 - Lurus - Belok Belok -Terisi
(a)
(c)
Gambar 4.10(a) wesel 7 belok menuju jalur 4, (b) semua wesel lurus menuju jalur 3, (c) wesel 11 dan wesel 10 belok menuju jalur 2
Table 4.6Tabel pengujian lampu sinyal L1 kereta masuk dari kanan
Kondisi Jalur Kondisi Awal
Kondisi Sensor Aktif Merah Hijau Merah Hijau Jalur 2, Jalur 3 dan Jalur 4 Kosong Menyala Mati Mati Menyala
Jalur 2 dan Jalur 3 Kosong Menyala Mati Mati Menyala Jalur 2 Kosong Menyala Mati Mati Menyala
Table 4.7Tabel pengujian wesel kondisi 2 kereta keluar ke kiri
(a)
(b)
(c)
Table 4.8Tabel pengujian lampu sinyal kondisi 2 kereta keluar
Lampu Sinyal Kondisi Awal Setelah 18 Detik Merah Hijau Merah Hijau L5 Menyala Mati Mati Menyala L6 Menyala Mati Mati Menyala L7 Menyala Mati Mati Menyala
Dari data hasil pengujian yang didapatkan dapat dianalisa bahwa sistem dapat menentukan jalur mana yang akan dilalui oleh kereta dan jalur mana yang sedang digunakan oleh kereta yang lainnya. Sistem yang dibuat secara otomatis menggerakan wesel-wesel yang akan dilalui oleh kereta untuk membuka dan menutup lampu sinyal untuk memberikan tanda aman kepada masinis yang mengendalikan kereta agar dapat bergerak sesuai dengan jalur yang telah ditentukan oleh sistem.
4.2.3 Pengujian dan Analisa Kondisi 3
akan tetap lurus karena untuk memberi jalan menuju ke jalur 4. Berikut hasil data pengujian.
Gambar 4.12Kereta datang dari sebelah kiri dan kanan
Table 4.9Tabel pengujian wesel kondisi 3 kereta yang masuk dari kiri
Tujuan Arah Kedatangan
Kondisi Wesel
1 2 3 4 5 6
Datang Dari Kiri - Lurus - Lurus - Belok
Table 4.10Tabel pengujian wesel kondisi 3 kereta yang masuk dari kanan
Tujuan Arah Kedatangan
Kondisi Wesel
7 8 9 10 11 12
Datang Dari Kanan Belok - Lurus - Lurus
-Gambar 4.14Wesel 11 berbelok untuk menuju ke jalur 4
Table 4.11Tabel pengujian wesel kondisi 3 kereta yang akan keluar ke kanan
Tujuan Arah Kedatangan
Kondisi Wesel
7 8 9 10 11 12
Keluar Ke Kanan - Belok - Lurus - Lurus
Gambar 4.15Wesel 8 berbelok untuk menuju ke jalur keluar dari jalur 1
Table 4.12Tabel pengujian wesel kondisi 3 kereta yang akan keluar ke kiri
Tujuan Arah Kedatangan
Kondisi Wesel
1 2 3 4 5 6
-Gambar 4.16Wesel 5 berbelok untuk menuju ke jalur keluar dari jalur 4
Dari data-data yang didapatkan ketika pengujian kondisi 3 maka dapat di analisa apabila ada dua kereta yang datang secara bersamaan dan kondisi seluruh jalur dalam keadaan kosong maka, secara otomatis sistem akan menentukan jalur yang akan dilewati oleh setiap kereta dengan mendahulukan jalur kereta yang sebelah kanan terlebih dahulu dari arah kedatangan kereta. Kedatangan dua kereta sekaligus tidak menghambat laju kereta yang satu dengan yang lainnya selama tersedianya jalur yang kosong untuk dilewati kereta tersebut.
4.2.4 Pengujian dan Analisa Kondisi 4
jalur 3 karena walaupun prinsip dari sistem adalah menempatkan kereta ke jalur paling kanan tapi karena jalur 2 sedang digunakan oleh kereta yang berlawanan arah maka sistem akan secara otomatis akan memilih jalur yang kosong. Kereta akan diarahkan ke jalur 3 dengan melewati wesel 2, wesel 3 dan wesel 5. Wesel 2 dan wesel 3 akan berbelok dan wesel 5 akan tetap lurus agar kereta dapat menuju ke jalur 3. Berikut adalah hasil data pengujian yang dilakukan.
Gambar 4.17Kereta datang dari kiri jalur 1, jalur 2 dan jalur 4 terisi maka kereta menuju jalur 4
Table 4.13Tabel pengujian wesel kondisi 4 kereta yang akan masuk dari kiri
Kondisi Jalur Jalur Tujuan Wesel
1 2 3 4 5 6
Jalur 1, Jalur 2 dan
Gambar 4.18wesel 2 dan wesel 3 belok menuju jalur 3
Dari hasil pengujian dapat dianalisa bahwa sistem dapat membaca kondisi setiap jalur walaupun kereta yang menepati jalur yang akan dituju merupakan kereta yang berasal dari arah yang berlawanan. Disinilah guna penampatan sensor-sensor keadaan sebagai input ke PLC yang terhubung secara paralel antara ketiga PLC yang digunakan.
4.2.5 Pengujian dan Analisa Kondisi 5
Gambar 4.19Jalur 1, jalur 2 dan jalur 3 terisi
Table 4.14Tabel pengujian Lampu Sinyal Kondisi 5 pengujian pertama
Kondisi Jalur
Kondisi Lampu Sinyal Awal
Kondisi Ada Kereta Yang Akan Masuk
Merah Hijau Merah Hijau Jalur 1, jalur 2
dan Menyala Mati Menyala Mati jalur 3 terisi
Jika hanya sekali maka sistem bekerja sesuai dengan yang diinginkan oleh penulis tapi jika kondisi setelah salah satu kereta yang ada di stasiun sudah keluar kemudian kereta yang menunggu di jalur kedatangan telah masuk ke salah satu jalur, lalu datang lagi kereta dengan arah kedatangan yang sama akan masuk juga ke stasiun. Berikut hasil pengujiannya.
Table 4.15Tabel pengujian Lampu Sinyal Kondisi 5pengujian kedua
Kondisi Jalur
Kondisi Lampu Sinyal Awal
Kondisi Ada Kereta Yang Akan Masuk
Merah Hijau Merah Hijau Jalur 1, jalur 2
dan Menyala Mati * Mati * Menyala jalur 3 terisi
Keterangan : * = eror pada sistem
Gambar 4.21Kondisi lampu sinyal L1 menyala hijau terjadi eror
pada kondisi sebenarnya maka masinis akan melewati lampu sinyal karena lampu sinyal memberi menyala hijau yang akan mengakibatkan kecelakaan yang membahayakan penumpang.
i
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Setelah melewati proses pengujian dan data yang didapat dari hasil pengujian, maka dapat disimpulkan bahwa :
a. Proses rancang bangun pengontrolan jalur lintasan kereta api berbasis PLC OMRON dengan mempelajari sistem jalur lintasan kereta api yang sebenarnya, telah diusahakan sebaik mungkin untuk memaksimalkan kerja PLC OMRON dalam melakukan pengontrolan sistem terdapat kendala pada kapasitas PLC OMRON dalam menerima program yang dibuat. Hal ini mengakibatkan terjadinya eror di satu kasus pengujian.
b. Selepas dengan hasil eror pada pengujian ke-5, hasil pengujian kondisi yang lainnya sesuai dengan tabel kebenaran sistem yang telah dibuat sebelumnya. Tujuan tersebut tercapai karena prinsip logika sistem yang dibuat dengan penggunakan ladder diagram sebagai bahasa pemograman PLC OMRON.
c. Sistem berjalan dengan baik karena PLC membandingkan kondisi-kondisi yang ada pada setiap jalur dengan input dari sensor keadaan. d. PLC OMRON ZEN 10C1AR-A-V1 yang digunakan ini hanya dapat
ii
Pengontrolan sistem lintasan kereta api ini supaya mampu dibuat dengan rancangan yang lebih sempurna dengan alat pengendali PLC. Adapun hal-hal yang dirasa kurang sempurna dan patut untuk menjadi bahan pertimbangan rancangan selanjutnya adalah dengan melakukan :
a. Mengganti PLC OMRON ZEN 10C1AR-A-V1 dengan menggunakan PLC yang memiliki kapasitas pemprograman yang lebih besar dirasa penulis dapat melakukan pengontrolan ini dengan sempurna tanpa terjadi eror.
b. Menambah jumlah jalur yang tersedia agar jumlah kereta yang datang dan kereta yang masuk dapat diimplementasikan di daerah-daerah lintasan yang cukup sibuk dengan hilir mudik datangnya kereta.
c. Penambahan suatu sensor di ujung setiap jalur agar sistem mengetahui jenis kereta yang akan memasuki stasiun. Misalnya untuk kereta pengangkut barang sistem akan memberikan sinyal hijau di lampu sinyal keberangkatan sejak kereta tersebut akan hendak memasuki stasiun karena kereta barang tidak berhenti di stasiun-stasiun yang di khususkan untuk penumpang.
iii
i OMRON, (2003). ZEN Programmable Relay
OMRON, (2003). ZEN Support Software
Yayasan Diklat Vidiatama. “Pelatihan Programmable Logic Controller(PLC)”. Bandung, Vidiatama
http://accessscience.com/content/Railroad-control-systems/571900
http://www.jrtr.net/jrtr21/pdf/F44_Technology.pdf
I. IDENTITAS DIRI
Nama Lengkap : Wida Pramudita
Nim : 13106002
Tampat, Tanggal Lahir : Bandung, 4 Juni 1988
Agama : Islam
Jenis Kelamin : Laki-laki
Status : Mahasiswa
Alamat : Jln Teluk Buyung Kaler no 9
Pajajaran Bandung
No. Handphone : 08562192055
1994 - 2000 : SDN Sejahtera VI Bandung
2000 – 2003 : SLTPN 40 Bandung
2003 – 2006 : SMA ANGKASA Bandung