PERANCANGAN DAN IMPLEMENTASI ROBOT IUV-ROV (INTEGRATED UNDERWATER VEHICLE ) SEBAGAI
ALAT BANTU SURVEI BAWAH AIR
SKRIPSI
YOGA NUGRAHA WAKAMENTA 071401051
PROGRAM STUDI S1 ILMU KOMPUTER DEPARTEMEN ILMU KOMPUTER
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERANCANGAN DAN IMPLEMENTASI ROBOT IUV-ROV (INTEGRATED UNDERWATER VEHICLE ) SEBAGAI
ALAT BANTU SURVEI BAWAH AIR
SKRIPSI
Diajukan untuk melengkapi tugas dan syarat mencapai gelar Sarjana Komputer
YOGA NUGRAHA WAKAMENTA 071401051
PROGRAM STUDI S1 ILMU KOMPUTER DEPARTEMEN ILMU KOMPUTER
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : PERANCANGAN DAN IMPLEMENTASI ROBOT IUV (INTEGRATED UNDERWATER VEHICLE) SEBAGAI ALAT BANTU SURVEI BAWAH AIR Kategori : SKRIPSI
Nama : YOGA NUGRAHA WAKAMENTA Nomor Induk Mahasiswa : 071401051
Program Studi : SARJANA (S1) ILMU KOMPUTER Departemen : ILMU KOMPUTER
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di
Medan, 27 Juni 2011
Komisi Pembimbing :
Pembimbing 2 Pembimbing 1
Drs. Dahlan Sitompul, M.Eng Dr. Poltak Sihombing. M.Kom NIP. 132 316 481 NIP. 196203171991021001
Diketahui/Disetujui oleh
Program Studi S1 Ilmu Komputer Ketua,
PERNYATAAN
PERANCANGAN DAN IMPLEMENTASI ROBOT IUV (INTEGRATED
UNDERWATER VEHICLE ) SEBAGAI ALAT BANTU
SURVEI BAWAH AIR
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 27 Juni 2011
PENGHARGAAN
Alhamdulillahirrabbil’alamin, puji dan syukur penulis ucapkan kepada Allah SWT yang Maha Pemurah dan Maha Penyayang, dengan limpahan karunia-Nya, kertas kajian ini berhasil diselesaikan dalam waktu yang telah ditetapkan.
Ucapan terima kasih penulis sampaikan kepada Bapak Dr. Poltak Sihombing, M.Kom dan Bapak Drs. Dahlan Sitompul, M.Eng selaku pembimbing pada penyelesaian skripsi ini yang telah memberikan panduan dan penuh kepercayaan kepada penulis untuk menyempurnakan kajian ini. Panduan ringkas, padat, dan profesional telah diberikan kepada penulis agar dapat menyelesaikan tugas ini. Selanjutnya kepada para Dosen Penguji Bapak Prof. Dr. Iryanto, M.Si dan Bapak Amer Sharif S.Si, M.Kom atas saran dan kritikan yang sangat berguna bagi penulis. Ucapan terima kasih juga ditujukan kepada Ketua dan Sekretaris Departemen Ilmu Komputer, Bapak Dr. Poltak Sihombing, M.Kom dan Ibu Maya Silvi Lydia, B.Sc.,M.Sc, Dekan dan Pembantu Dekan Fakultas Matematikan dan Ilmu Pengetahuan Alam Universitas Sumatera Utara, semua dosen pada Departemen Ilmu Komputer FMIPA USU, pegawai di Ilmu Komputer FMIPA USU, dan rekan-rekan kuliah.
Tidak lupa juga penulis ucapkan terima kasih kepada Ayahanda Iskandar dan Ibunda Shabiha H. Hanum yang selalu memberikan kepercayaan, dukungan, doa, dan semangat tanpa henti. Terakhir, kepada Gema, Lindo, dan Malin yang memberi inspirasi, kepada Adi atas kritik-kritik pencerahannya, dan juga kepada Diyan yang selalu mendukung dan memotivasi penulis. Semoga Allah SWT memberikan limpahan karunia kepada semua pihak yang telah memberikan bantuan, perhatian, serta dukungan kepada penulis dalam menyelesaikan tugas akhir ini.
ABSTRAK
Kajian ini bertujuan untuk memperoleh sebuah protipe robot IUV (Integrated
Underwater Vehicle) dengan berbasis sistem ROV (Remotely Operated Vehicle)
sebagai alat bantu survei bawah air. Input kontrol dari robot ini berasal dari keyboard komputer sebagai kontroler utama dan input ini diproses pada mikrokontroler. Robot ini dibangun menggunakan mikrokontroler MCS-51 yang diprogram dengan bahasa pemrograman assembly A51 (bahasa mesin mikrokontroler MCS-51) dan program GUI (graphical user interface) menggunakan Borland Delphi 7. Metode penelitian yang digunakan untuk pembangunan sistem ini adalah pengumpulan data kepustakaan seperti data perangkat keras, spesifikasi robot dan metode trial-and-error. Robot ini memiliki beberapa bagian utama yaitu perangkat kontroler menggunakan komputer,
keyboard sebagai kontroler aktuator propeller, kontroler manipulator, papan sirkuit
utama, dan kamera sebagai alat visualisasi. Objektif utama pembangunan sistem ini adalah merancang dan membangun robot IUV yang dapat membantu kegiatan survei bawah air.
DESIGN AND IMPLEMENTATION OF IUV-ROV ROBOT AS UNDER WATER SURVEY TOOL
ABSTRACT
The purpose of this study is to develop the prototype IUV (Integrated Underwater Vehicle) robot by using ROV (Remotely Operated Vehicle) system as underwater survey device. Input controls of the robot is derived from the computer keyboard as the main controller and the input is processed in the microcontroller. This robot is developed using MCS-51 microcontroller with A51 assembly language (machine language for MCS-51) and GUI (graphical user interface) program using Borland Delphi 7. The research method being used to develop the system are data library collection such as the hardware datasheet, the specification of the robot and
trial-and-error method. This robot includes several main parts: a controller device using a computer, a keyboard as the controller of propeller actuator, manipulator controller, the main circuit board, and the camera as a visualization tool. The main objective of development this study is to design and build IUV robot that can help underwater survey activities.
DAFTAR ISI
Halaman
HALAMAN JUDUL ...i
PERSETUJUAN ... ii
PERNYATAAN ... iii
PENGHARGAAN ... iv
ABSTRAK ... v
ABSTRACT ... vi
DAFTAR ISI ...vii
DAFTAR TABEL ... ix
DAFTAR GAMBAR ... x
BAB 1 PENDAHULUAN ... 1
1.1 Latar Belakang Masalah ... 1
1.2 Rumusan Masalah ... 3
1.3 Batasan Masalah ... 3
1.4 Tujuan Penelitian ... 3
1.5 Manfaat Penelitian ... 4
1.6 Metode Penelitian ... 4
1.7 Sistematika Penulisan... 5
BAB 2 TINJAUAN PUSTAKA ... 7
2.1 Robotika ... 7
2.1.1 Sejarah Robot ... 7
2.1.2 Karakteristik Robot ... 8
2.1.3 Tipe Robot ... 8
2.2 ROV (Remotely Operated Vehicle) ... 9
2.3 Mikrokontroler MCS-51 ... 11
2.4 Komunikasi Serial Asinkron RS232 pada Mikrokontroler MCS-51 ... 16
2.5 Aktuator ... 17
2.5.1 Motor DC ... 18
2.5.2 Motor Servo Standar ... 19
2.6 Driver Motor DC L298 ... 21
BAB 3 PERANCANGAN SISTEM ... 25
3.1 Komponen yang Digunakan ... 25
3.2 Perancangan Konstruksi Robot IUV ... 28
3.2.1 Desain Konstruksi Robot ... 28
3.2.1.1 Kerangka Robot ... 28
3.2.1.2 Tabung Buoyancy ... 30
3.2.1.3 Perancangan Body Utama Robot... 31
3.2.2 Perancangan Aktuator ... 32
3.2.2.1 Aktuator Propeller ... 32
3.2.2.2 Aktuator Roda ... 33
3.2.2.3 Aktuator Lengan Robot ... 35
3.2.3 Perancangan Sirkuit Elektronik ... 38
3.2.3.1 Rangkaian Sumber Tegangan ... 38
3.2.3.2 Rangkaian Mikrokontroler ... 39
3.2.3.3 Rangkaian Driver Komunikasi Serial ... 40
3.2.3.4 Rangkaian Driver Motor DC ... 41
3.2.3.5 Rangkaian Driver Aktuator Lengan dan Kamera ... 42
3.2.3.6 Sirkuit Utama ... 44
3.3 Perancangan Perangkat Kontrol ... 45
3.3.1 Perangkat Kontrol Utama ... 45
3.3.2 Perangkat Kontrol Analog ... 47
3.4 Perancangan Perangkat Lunak Robot ... 48
3.4.1 Perancangan Program Mikrokontroler ... 48
3.4.2 Perancangan Program Kendali Berbasis GUI (Graphical User Interface) ... 51
BAB 4 IMPLEMENTASI DAN PENGUJIAN SISTEM ... 56
4.1 Implementasi Bagian Konstruksi Robot ... 56
4.1.1 Implementasi Kerangka Robot ... 56
4.1.2 Implementasi Tabung Buoyancy ... 58
4.1.3 Implementasi Body Robot ... 59
4.2 Implementasi Aktuator Robot ... 60
4.2.1 Implementasi Propeller ... 60
4.2.2 Implementasi Roda Penggerak (Wheel) ... 61
4.2.3 Implementasi Lengan Robot ... 63
4.2.4 Implementasi Aktuator Kamera ... 64
4.3 Implementasi Rangkaian Sirkuit Elektronik ... 65
4.4 Implementasi Perangkat Kontroler ... 72
4.5 Implementasi Perangkat Lunak Robot ... 74
4.5.1 Modul Program Mikrokontroler ... 74
4.5.1.1 Rutin Program Komunikasi Serial ... 75
4.5.1.2 Rutin Program Antarmuka Propeller ... 75
4.5.2 Implementasi Program GUI ... 78
4.5.2.1 Modul Program Komunikasi Serial ... 79
4.5.2.2 Modul Program Kamera ... 80
4.5.2.3 Modul Program Kontrol ... 82
4.6 Pengujian Sistem... 85
BAB 5 KESIMPULAN DAN SARAN ... 87
5.1 Kesimpulan ... 87
5.2 Saran ... 88
DAFTAR PUSTAKA ... 89
DAFTAR TABEL
2.1 Koneksi Pin Port Paralel dan MCS-51 ... 15
2.2 Tabel Logika Prinsip Kerja IC L298... 21
3.1 Tabel Peralatan yang Digunakan ... 25
3.2 Rincian Komponen Fisik ... 26
DAFTAR GAMBAR
2.1 (a) Memori Program ... 12
2.1 (b) Memori Data (RAM) ... 12
2.2 Arsitektur Mikrokontroler MCS-51 ... 13
2.3 Penampang dan Konfigurasi Pin Mikrokontroler MCS-51 ... 13
2.4 Sistem minimum mikrokontroler MCS-51 ... 14
2.5 Rangkaian ISP Programmer ... 15
2.6 Susunan bit Register SBUF ... 16
2.7 Susunan Bit Register SCON ... 16
2.8 Susunan bit Register TMOD ... 17
2.9 bit Register TCON ... 17
2.10 Prinsip Gaya Lorentz ... 18
2.11 Arah perputaran motor DC ... 19
2.12 Motor servo dan konfigurasi pin ... 20
2.13 Hubungan Lebar Pulsa PWM dengan Arah Putaran Motor Servo ... 20
2.14 Penampang IC L298 ... 21
2.15 Penampang IC Timer 555. ... 22
2.16 Rangkaian Multivibrator Monostabil... 23
2.17 Rangkaian Multivibrator Astabil ... 24
2.18 (a) Output Multivibrator Monostabil ... 24
2.18 (b) Output Multivibrator Astabil ... 24
3.1 Rancangan Kerangka Robot IUV ... 29
3.2 Gaya Buoyancy dan Gravity ... 29
3.3 Penempatan Tabung Buoyancy... 31
3.4 Rancangan Body Utama ... 31
3.5 (a) Rancangan propeller... 32
3.5 (b) Komponen propeller ... 32
3.5 (c) Desain Pergerakan Robot Menggunakan Propeller ... 33
3.6 Skema Switching Aktuator Wheel ... 34
3.7 (a) Penampang Wheel ... 34
3.7 (b) Komponen Aktuator Wheel ... 35
3.8 Prinsip Kerja Aktuator Hidraulik ... 36
3.9 Rancangan Aktuator Lengan ... 36
3.10 Rancangan Aktuator dan Sudut Pandang Kamera ... 37
3.11 Rangkaian Sumber Tegangan ... 38
3.12 Sinyal Clock ... 39
3.13 Rangkaian Sistem Minimum ... 40
3.14 Rangkaian Driver Komunikasi Serial ... 41
3.15 Rangkaian Driver Motor DC ... 42
3.16 Rangkaian Driver Motor Servo IC 555 ... 43
3.17 Rangkaian Main Circuit ... 44
3.18 Tombol Kontrol Keyboard ... 46
3.21 Flowchart Pembacaan Input Penunjuk Rutin Gerakan Vertikal... 49
3.22 Flowchart Komunikasi Serial ... 50
3.23 Rancangan Interface Program ... 52
3.24 Flowchart Program Kendali GUI ... 53
4.1 (a) Peralatan dan Bahan untuk pembuatan Kerangka Robot ... 57
4.1 (b) Perakitan Kerangka Robot ... 57
4.1 (c) Kerangka Robot ... 58
4.2 Tabung Buoyancy ... 58
4.3 Body Utama Robot ... 59
4.4 (a) Komponen Propeller Robot ... 60
4.4 (b) Propeller Robot ... 61
4.5 Komponen Wheel ... 61
4.6 Penampang Wheel ... 62
4.7 (a) Aktuator Motor Servo dan Pompa Hidraulik ... 63
4.7 (b) Lengan Robot ... 63
4.8 (a) Aktuator Kamera dan Tabung Pelindung ... 64
4.8 (b) Kamera... 64
4.9 Rangkaian pada Papan PCB dan Protoboard ... 65
4.10 Pembuatan Schematic Rangkaiaan Menggunakan Software Eagle 5.6 66 4.11 Pembuatan Layout PCB ... 66
4.12 (a) Pemindaian Komponen pada Layout PCB ... 67
4.12 (b) Layout PCB yang Di-print pada Kertas ... 67
4.13 Fotokopi Layout pada Kertas Foto ... 68
4.14 Hasil Penyablon Layout pada Papan PCB ... 68
4.15 Pelarutan PCB ... 69
4.16 Pengeboran Papan PCB ... 70
4.17 Penempatan Komponen dan Penyolderan ... 70
4.18 Pengujian Papan PCB Sirkuit ... 71
4.19 Papan Circuit Utama ... 71
4.20 Keyboard sebagai Kontroler Utama ... 72
4.21 (a) Perangkat Kontroler Analog ... 73
4.21 (b) Kabel Umbilical ... 73
4.22 Pembuatan Program dengan MIDE-51 ... 74
4.23 Tampilan Antarmuka Program GUI ... 75
ABSTRAK
Kajian ini bertujuan untuk memperoleh sebuah protipe robot IUV (Integrated
Underwater Vehicle) dengan berbasis sistem ROV (Remotely Operated Vehicle)
sebagai alat bantu survei bawah air. Input kontrol dari robot ini berasal dari keyboard komputer sebagai kontroler utama dan input ini diproses pada mikrokontroler. Robot ini dibangun menggunakan mikrokontroler MCS-51 yang diprogram dengan bahasa pemrograman assembly A51 (bahasa mesin mikrokontroler MCS-51) dan program GUI (graphical user interface) menggunakan Borland Delphi 7. Metode penelitian yang digunakan untuk pembangunan sistem ini adalah pengumpulan data kepustakaan seperti data perangkat keras, spesifikasi robot dan metode trial-and-error. Robot ini memiliki beberapa bagian utama yaitu perangkat kontroler menggunakan komputer,
keyboard sebagai kontroler aktuator propeller, kontroler manipulator, papan sirkuit
utama, dan kamera sebagai alat visualisasi. Objektif utama pembangunan sistem ini adalah merancang dan membangun robot IUV yang dapat membantu kegiatan survei bawah air.
DESIGN AND IMPLEMENTATION OF IUV-ROV ROBOT AS UNDER WATER SURVEY TOOL
ABSTRACT
The purpose of this study is to develop the prototype IUV (Integrated Underwater Vehicle) robot by using ROV (Remotely Operated Vehicle) system as underwater survey device. Input controls of the robot is derived from the computer keyboard as the main controller and the input is processed in the microcontroller. This robot is developed using MCS-51 microcontroller with A51 assembly language (machine language for MCS-51) and GUI (graphical user interface) program using Borland Delphi 7. The research method being used to develop the system are data library collection such as the hardware datasheet, the specification of the robot and
trial-and-error method. This robot includes several main parts: a controller device using a computer, a keyboard as the controller of propeller actuator, manipulator controller, the main circuit board, and the camera as a visualization tool. The main objective of development this study is to design and build IUV robot that can help underwater survey activities.
BAB 1
PENDAHULUAN
1.1 Latar Belakang Masalah
Teknologi komputer, terutama robotika di masa sekarang sudah menjadi bagian penting dalam kehidupan manusia. Robot adalah peralatan eletro-mekanik atau bio-mekanik, atau gabungan peralatan yang menghasilkan gerakan yang otonomi maupun gerakan berdasarkan gerakan yang diperintahkan [6]. Robot dalam beberapa hal dapat menggantikan peran manusia, hal ini terlihat pada robot-robot yang diterapkan dalam berbagai bidang seperti industri, kesehatan (health), pertahanan (defense), pertanian (agriculture), penelitian (research), pemainan (game), dan lain-lain.
Dalam industri modern, robot telah mengambil alih posisi para pekerja di pabrik-pabrik. Misalnya dalam industri automotif, alat elektronik, peranti komputer, robot telah menjadi penggerak utama dari industri ini. Alasan utama penggunaan robot adalah karena, robot dalam kondisi tertentu (syarat minimum operasi terpenuhi) dapat menjadi pekerja yang ideal, robot memiliki tingkat akurasi dan efisiensi yang
tinggi, serta yang lebih penting adalah biaya operasinya rendah dengan output yang dihasilkan lebih tinggi.
Ada beberapa tipe robot, yang secara umum dapat dibagi menjadi dua kelompok
yakni robot manipulator dan robot mobil (mobile robot). Robot manipulator dicirikan dengan memiliki lengan (arm robot), dan banyak digunakan untuk robot industri. Sedangkan robot mobil merupakan robot yang dapat bergerak berpindah tempat, meskipun nantinya robot tersebut juga dipasang manipulator. Robot mobil dapat dikelompokkan lagi menjadi tiga yaitu robot daratan (ground robot), robot air
banyak dikembangkan pada saat sekarang ini karena melihat sifatnya yang sangat fungsional.
Pada penelitian ini akan dikembangkan underwater robot IUV (integrated
underwater vehicle) dengan berbasis sistem ROV (remotely operated vehicle). Secara
sederhana cara kerja dari robot berbasis ROV adalah dioperasikan menggunakan sistem yang dikendalikan oleh pengguna melalui perangkat kontroler. Sistem kendali
robot dan robot itu sendiri dihubungkan dengan media transmisi data seperti kabel atau gelombang radio (RF=Radio Frequency).
Alasan kenapa pada penelitian ini penulis mengangkat tema robot underwater
robot (IUV), adalah karena robot ini belum banyak dikembangkan dan mungkin
kurang mendapat perhatian, khususnya di Indonesia. Hal ini sangat ironis dan bertolak belakang dengan kondisi geografis Indonesia, dimana Indonesia adalah negara yang memiliki perairan yang sangat luas dan mengandung nilai potensi ekonomi yang sangat besar. Banyak sekali yang belum tergali karena keterbatasan kemampuan manusia untuk memetakan potensi bawah laut Indonesia terutama untuk kawasan laut dalam yang belum terjamah. Untuk menggali dan menjaga potensi ini diperlukan perangkat pendukung yang mampu membantu proses eksplorasi tersebut dan salah satunya adalah dengan menggunakan robot IUV. Kebanyakan kegiatan eksplorasi bawah air dilakukan sendiri oleh manusia tanpa bantuan robot, seperti pengamatan bawah laut. Pengamatan bawah laut yang dilakukan sendiri oleh manusia memiliki beberapa resiko yaitu adanya area-area yang sulit dijangkau manusia serta
ancaman dari serangan binatang-binatang berbahaya. Oleh karena itu, untuk memaksimalkan proses eksplorasi bawah air itu diperlukan alat yang mampu bergerak bebas di dalam air, aman dan efisien dalam membantu tugas manusia. Dengan latar belakang tersebut penulis tertarik untuk melakukan penelitian yang
1.2 Rumusan Masalah
Rumusan masalah yang akan dibahas penelitian ini adalah bagaimana merancang dan
mengimplementasikan robot IUV yang berbasis sistem ROV, serta bagaimana membuat antarmuka baik secara hardware maupun software untuk keperluan pengendalian robot.
1.3 Batasan Masalah
Agar fokus penelitian ini tidak menyimpang dari rumusan masalah yang telah ditetapkan, maka dibuat batasan masalah sebagai berikut:
1. Sistem yang akan dibangun meliputi robot IUV, perangkat kendali robot (hardware), dan antarmuka pengendalian robot (software).
2. Implementasi robot IUV dan sistem kontrol menggunakan mikrokontroler MCS-51 sebagai pemroses utama.
3. Aplikasi bahasa yang digunakan adalah assembler A51 (bahasa assembler mikrokontroler MCS-51) dan pemrograman antarmuka menggunakan Borland Delphi 7.
1.4 Tujuan Penelitian
1.5 Manfaat Penelitian
Manfaat dari penelitian ini adalah sebagai berikut :
1. Dapat menciptakan sebuah prototype perangkat (Robot IUV) yang menjadi alat bantu dalam melakukan kegiatan bawah air.
2. Pengembangan dari robot IUV dapat diterapkan sebagai alat bantu dalam berbagai bidang yang berkaitan dengan kegiatan bawah air seperti bidang
militer (defense), penelitian (research), SAR (Search and Rescue), industri (khususnya pengeboran minyak lepas pantai dan konstruksi bawah air), dan peliputan dunia bawah laut (Oseanografi).
1.6 Metode Penelitian
Tahapan yang dilakukan dalam penelitian ini adalah sebagai berikut: 1. Studi Literatur
Pada tahap ini dilakukan pengumpulan referensi yang diperlukan dalam penelitian. Hal ini dilakukan untuk memperoleh informasi dan data yang diperlukan untuk penulisan skripsi ini. referensi yang digunakan dapat berupa buku, jurnal, artikel, situs internet yang berkaitan dengan penelitian ini.
2. Pengumpulan dan Analisa Data
Pada tahap ini dilakukan pengumpulan dan analisa data yang berhubungan dengan penelitian ini seperti datasheet dan cara kerja komponen yang
digunakan serta protokol yang diterapkan dalam komunikasi antara perangkat (robot IUV) dengan perangkat pengendali.
3. Perancangan Sistem
Merancang sistem sesuai dengan rencana yang telah ditentukan, yaitu meliputi
perancangan desain robot, hardware, dan software. Proses perancangan ini berdasarkan pada batasan masalah dari penelitian ini.
4. Implementasi Sistem
5. Pengujian Sistem
Pada tahap ini akan dilakukan pengujian terhadap sistem yang telah dikembangkan.
6. Penarikan Kesimpulan
Setelah dilakukan pengujian maka dapat ditarik kesimpulan sesuai dengan hasil yang diperoleh.
1.7 Sistematika Penulisan
Sistematika penulisan dari skripsi ini terdiri dari beberapa bagian utama sebagai berikut:
BAB 1 PENDAHULUAN
Bab ini akan menjelaskan mengenai latar belakang masalah yang dibahas dalam skripsi ini, rumusan masalah, batasan masalah, tujuan penelitian, manfaat penelitian, metode penelitian, dan sistematika penulisan skripsi.
BAB 2 LANDASAN TEORI
Bab ini merupakan tinjauan teoritis yang berkaitan dengan robotika, sistem ROV, mikrokontroler, komunikasi serial asinkron RS232, aktuator robot (motor DC dan servo standar), driver motor DC L298, dan driver servo Timer 555.
BAB 3: PERANCANGAN SISTEM
BAB 4: IMPLEMENTASI DAN PENGUJIAN SISTEM
Bab ini merupakan implementasi secara nyata dari sistem yang telah dirancang sebelumnya, dalam bentuk hardware (robot IUV dan perangkat kontroler) dan
software antarmuka pengendalian. Bab ini juga meliputi tahap pengujian yang
bertujuan memperbaiki bug dari sistem.
BAB 5: KESIMPULAN DAN SARAN
BAB 2
TINJAUAN PUSTAKA
2.1 Robotika
2.1.1 Sejarah Robot
Istilah robot berasal dari Czech, robota, yang berarti bekerja. Istilah ini diperkenalkan pertama kali oleh Karel Capek pada tahun 1921 [4]. Robot adalah peralatan eletro-mekanik atau bio-eletro-mekanik, atau gabungan peralatan yang menghasilkan gerakan yang otonomi maupun gerakan berdasarkan gerakan yang diperintahkan [6].
Robot sudah ada sejak zaman yunani kuno sekitar 270 SM, Ctesibus, membuat organ dan jam air dengan komponen yang dapat dipindahkan. Pada zaman Nabi Muhammad SAW telah dibuat mesin perang beroda dan dapat melontarkan bom. Bahkan Al-Jajari (1136-1206), ilmuwan dari dinasti Artuqid, dianggap sebagai pencipta robot humanoid pertama. Pada tahun 1770, Pierre Jacquet Droz, membuat boneka yang dapat menulis, memainkan musik, dan menggambar. Pada tahun 1898 Nikola Tesla membuat boat yang dikontrol melalui radio kontrol. Kejayaan robot dimulai pada tahun 1970 ketika profesor Victor Scheinman dari Universitas Stanford mendesain lengan standar. Pada tahun 2000, Honda meluncurkan ASIMO dan disusul
2.1.2 Karakteristik Robot
Sebuah robot umumnya memiliki karakteristik sebagai berikut [4]:
1. Sensing : Robot dapat mendeteksi lingkungan sekitarnya (halangan, panas, suara, dan image).
2. Mampu Bergerak : Robot umumnya bergerak dengan menggunakan kaki atau roda, dan pada beberapa kasus robot dapat terbang dan berenang.
3. Cerdas : Robot memiliki kecerdasan buatan agar dapat memutuskan aksi yang tepat dan akurat.
4. Membutuhkan Energi yang Memadai : Robot membutuhkan catu daya yang memadai.
2.1.3 Tipe Robot
Robot didesain dan dibuat sesuai kebutuhan pengguna. Robot, hingga saat ini, secara umum dibagi menjadi beberapa tipe sebagai berikut [4]:
1. Robot manipulator
2. Robot mobil (mobile robot) a. Robot daratan (ground robot)
1) Robot beroda 2) Robot berkaki
b. Robot air (submarine robot) c. Robot terbang (aerial robot)
2.1.4 Robot Bawah Air (Underwater Robot)
Robot bawah air adalah salah satu tipe robot mobile yang aplikasinya ditujukan untuk
melakukan kegiatan di bawah air [11]. Secara umum robot bawah air di kelompokkan atas dua jenis yaitu AUV (Autonomous Underwater Vehicle ) dan ROV (Remotely
Operated Vehicle ). AUV adalah jenis robot bawah air yang bersifat autonomous,
robot dapat bergerak dan melakukan kegiatan sendiri, berdasarkan program yang telah
ditanamkan di dalam chip-nya. Hal ini ditunjang dengan dukungan dari sensor-sensor yang disertakan pada robot tersebut. Sedangkan ROV adalah robot bawah air yang dikendalikan oleh operator dalam pengoperasiannya, dan didukung oleh perangkat kendali (remote kontrol) dalam pengoperasiannya. Contoh Robot penyelam termasuk dalam jenis robot atau kendaraan bawah air yang tergolong ROV. Robot penyelam adalah robot yang mampu bergerak di dalam air. Gerakan yang dapat dilakukan adalah naik dan turun/menyelam. Gerakan ke atas timbul akibat adanya gaya dorong dari putaran propeller, sedangkan untuk gerak menyelam disebabkan oleh berat beban dari robot (saat kondisi motor off).
2.2 ROV (Remotely Operated Vehicle)
ROV (Remotely Operated Vehicle) menurut Marine Technology Society ROV
Committee’s dalam “Operational Guidelines for ROVs” (1984) dan The National
Research Council Committee’s dalam “Undersea Vehicles and National Needs”
(1996) pada dasarnya sebuah robot bawah laut yang dikendalikan oleh operator ROV, untuk tetap dalam kondisi yang aman, pada saat ROV bekerja di lingkungan yang
berbahaya [11].
disampaikan dari perangkat kontrol ke ROV, secara dua arah. ROV dilengkapi dengan peralatan atau sensor tertentu seperti kamera video, transponder, kompas, odometer,
bathy (data kedalaman) dan lain-lain tergantung dari keperluan dan tujuan surveinya.
Kebanyakkan ROV dilengkapi dengan kamera video dan lampu yang digunakan untuk melakukan pengamatan. Kemampuannya bisa ditingkatkan dengan menambahkan sonar, magnetometer, kamera foto, manipulator atau lengan robotik,
pengambil sampel air, dan alat pengukur kejernihan air, penetrasi cahaya, serta temperatur. Kabel-kabel ROV dilapisi dengan tabung penuh minyak agar terhindar dari korosi air laut. Alat pendorong dipasang di tiga lokasi agar menghasilkan kontrol penuh terhadap alat itu. Adapun kamera, lampu, dan lengan manipulator berada di bagian depan atau belakang.
ROV terbagi atas berbagai tipe [11], tergantung dari kemampuan dan fungsi kerjanya. Small Electric Vehicle (ROV Kecil), berdimensi mini untuk kedalaman kurang dari 300m, biasanya untuk keperluan inspeksi dan pengamatan, digunakan untuk inspeksi perairan pantai, juga untuk ilmiah, SAR, waduk, dan saluran air. Work
Class Vehicle, yang menggunakan listrik dan hidrolik sebagai sumber tenaganya.
Sebagian besar tipe ini untuk mendukung pekerjaan pengeboran lepas pantai, yang digunakan untuk survei dan rektifikasi pipa gas bawah laut dan kelas inspeksi (inspection-class) dan yang kelas kerja atau (work-class). ROV kelas inspeksi ini kecil dan agak ringan, biasanya digunakan untuk survei dan pekerjaan tes karat (catodhic
protection) konstruksi platform dan bangunan air lepas pantai.
Sistem ROV pada umumnya bekerja di atas wahana apung seperti kapal,
barge, atau rig. Bila sistem ROV dipasang diatas kapal, maka posisi ROV di bawah
laut akan mengacu pada titik referensi di kapal. Untuk keperluan survei, kapal
2.3 Mikrokontroler MCS-51
Mikrokontroler MCS-51 adalah keluarga mikrokontroler 8051 yang diperkenalkan pertama kali oleh Intel Corporation. Mikrokontroler MCS-51 standar adalah mikrokontroler 8 bit, di mana bus data internal dan register-register yang dimilikinya memiliki lebar data 8 bit.
Mikrokontoler MCS-51 memiliki fitur antara lain: 4×8 bit port I/O, RAM internal 128 bytes, memiliki 2 buah timer, sebuah port serial, kendali interupsi dengan 5 sumber interupsi, dapat mengalamati memori program sampai 64 Kbyte (KB) dan memori data sampai 64 KB, dan register-register khusus (SFR=Special Function
Register) seperti akumulator (A), register B, stack pointer (SP), data pointer (DPTR),
P0, P1, P2, P3 untuk mengakses port I/O, buffer data serial, register timer, register kendali untuk port serial, timer, dan interupsi [10].
Terdapat tiga bagian penting pada mikrokontroler MCS-51, yaitu memori program (flash memori), memori data, dan CPU (Central Processing Unit) yang bertugas membaca memori program dan menjalankan perintah yang tersimpan di dalamnya. CPU ini tersusun oleh sebuah unit aritmetika dan logika (ALU=Arithmethic Logic Unit) yang terhubung dengan SFR yaitu register A (ACC=
accumulator), register B, PSW (Program Status Word) dan stack pointer (SP). Dan
EA=1 EA=0 1000
60 KB Ekstrenal
Memori
4 KB Internal Memori
64 KB Eksternal
Memori FFFF
0FFF
0000
FFFF
0000
(a)
(b)
Gambar 2.2 Arsitektur Mikrokontroler MCS-51
Untuk dapat mengoperasikan mikrokontroler MCS-51, harus dibuat sistem minimum yang meliputi komponen antara lain: sumber tegangan (Vcc), Ground (Gnd), Osilator, dan sistem reset. Dengan sistem minimum ini mikrokontroler
MCS-51 sudah dapat diprogram dan dioperasikan. Gambar 2.4 menunjukkan sistem minimum mikrokontroler MCS-51.
Gambar 2.4 Sistem minimum mikrokontroler MCS-51
Untuk membuat program mikrokotroler MCS-51 digunakan editor dan
compiler untuk bahasa assembler A51 (bahasa assembler mikrokontroler
MCS-51)[1][7]. Dalam pembahasan ini editor dan compiler yang digunakan adalah M-IDE Studio MCS-51. Setelah proses pembuatan dan kompilasi program selesai dilakukan
Gambar 2.5 Rangkaian ISP Programmer
Tabel 2.1 Koneksi Pin Port Paralel dan MCS-51
Port paralel MCS-51
No pin Nama pin No pin Nama pin
6 D4 8 SCK
7 D5 6 MOSI
9 D8 9 Reset
10 S6 7 MISO
18-25 Ground 20 Ground
Keterangan:
1. SCK : Serial Clock
2.4 Komunikasi Serial Asinkron RS232 pada Mikrokontroler MCS-51
Komunikasi serial adalah salah satu metod data yang dikirimkan melalui seuntai[2]. Hal ini berbeda dengan komunikasi parallel yang umumnya mengirim data per 8 bit (1 byte). Berdasarkan cara transmisi datanya komunikasi serial dibedakan atas dua cara transmisi yaitu komunikasi serial sinkron dan asinkron. Komunikasi serial secara sinkron adalah bentuk komunikasi serial yang memerlukan sinyal clock untuk sinkronisasi, sedangkan komunikasi asinkron tidak memerlukan sinyal clock sebagai sinkronisasi, namun memiliki start bit dan stop bit untuk memvalidasi data yang dikirim.
Port serial MCS-51 bisa dipakai dalam 4 mode kerja yang berbeda. Dari 4 mode
tersebut, 1 mode diantaranya bekerja secara sinkron dan 3 lainnya bekerja secara asinkron. Register pengendali port serial adalah SFR yaitu SBUF(serial port buffer) dan SCON (serial port control). SBUF adalah buffer untuk pengiriman dan penerimaan data serial, sedangkan SCON menyimpan bit status pengiriman dan penerimaan data dan mengatur mode kerja port serial. Gambar 2.6 dan 2.7 menunjukkan susunan bit pada register SBUF dan SCON [13].
Gambar 2.6 Susunan bit Register SBUF
Dalam komunikasi serial secara asinkron dikenal istilah baud rate yang menunjukkan jumlah data yang dikirim melalui interface serial per detik. Sebagai pembangkit baud rate pada mikrokontroler MCS-51 dapat digunakan Timer. Pada
pembahasan ini timer yang digunakan adalah Timer 1. Timer diatur oleh register TMOD (timer mode) dan TCON (timer control). Gambar 2.8 dan 2.9 menunjukkan susunan bit pada register TMOD dan TCON [13].
Gambar 2.8 Susunan bit Register TMOD
Gambar 2.9 bit Register TCON
2.5 Aktuator
Aktuator adalah bagian yang berfungsi sebagai penggerak dari perintah yang diberikan oleh input [4]. Aktuator biasanya merupakan peranti elektromekanik yang menghasilkan gaya gerakan. Aktuator secara umum terdiri dari dua jenis, yaitu [9] :
1. Aktuator elektrik
2. Aktuator pneumatik dan hidrolik.
2.5.1 Motor DC
Motor DC adalah suatu mesin yang berfungsi untuk mengubah energi listik arus searah menjadi energi gerak atau energi mekanik [4]. Motor DC terdiri dari dua bagian utama, yaitu rotor dan stator. Rotor adalah bagian yang berputar atau armature, berupa koil dimana arus listrik dapat mengalir. Stator adalah bagian yang tetap dan menghasilkan medan magnet dari koilnya.
Prinsip kerja motor DC adalah jika kumparan dialiri arus listrik maka pada kedua kumparan akan bekerja gaya Lorentz [14]. Pada gambar 8.10 dapat dilihat prinsip kerja gaya Lorentz, dimana gaya yang jatuh pada telapak tangan (F), jari yang direntangkan menunjukan arah medan magnet (B), ibu jari menunjukkan arah arus listrik(I).
Gambar 2.10 Prinsip Gaya Lorentz (Sumber: http://hyperphysics.phy-astr.gsu.edu)
Dengan berdasarkan pada prinsip gaya Lorentz, memberikan tegangan pada DC motor akan membuat motor berputar secara kontinyu ke arah tertentu. Membalik arah putaran motor dapat dilakukan dengan mengubah polaritas arus yang mengalir pada
Gambar 2.11 Arah perputaran motor DC
Motor DC biasanya mempunyai kecepatan putar yang cukup tinggi dan sangat cocok digunakan untuk roda robot yang membutuhkan kecepatan gerak yang tinggi. Juga dapat digunakan sebagai baling-baling (propeller) pengerak robot. Pada penelitian ini motor DC digunakan sebagai penggerak utama robot IUV.
2.5.2 Motor Servo Standar
Motor servo adalah motor DC yang dilengkapi dengan sistem kontrol. Sistem kontrol ini akan memberikan umpan balik posisi perputaran motor dari 0 sampai 180 derajat.
Disamping itu motor ini juga memiliki torsi relatif cukup kuat [5]. Gambar 2.12 menunjukkan penampang dan pengkabelan dari motor servo. Sistem pengkabelan motor servo terdiri atas 3 bagian, yaitu Vcc, Gnd, dan Kontrol (PWM= Pulse Width
Modulation). Pemberian PWM pada motor servo akan membuat servo bergerak pada
posisi tertentu dan kemudian berhenti (kontrol posisi).
Gambar 2.12 Motor servo dan konfigurasi pin
Prinsip utama dari pengendalian motor servo adalah pemberian nilai PWM pada kontrolnya. Frekuensi PWM yang digunakan pada pengontrol motor servo selalu 50 Hz sehingga pulsa dihasilkan setiap 20 ms. Lebar pulsa akan menentukan posisi servo
yang dikehendaki. Pemberian lebar pulsa 1,5 ms akan membuat motor servo berputar ke posisi netral (90 derajat), lebar pulsa 1,75 ms akan membuat motor servo berputar l;;\mendekati posisi 180 derajat, dan dengan lebar pulsa 1,25 ms motor servo akan bergerak ke posisi 0 derajat. Gambar 2.13 berikut memperlihatkan hubungan antara lebar pulsa PWM dengan arah putaran motor servo.
2.6 Driver Motor DC L298
IC dalamnya, sehingga dapat digunakan untuk men-drive dua buah motor DC [8]. IC L298 masing-masing dapat mengantarkan arus hingga 2A. Namun, dalam penggunaannya, menjadi 4A.
Prinsip kerja IC L298, IC ini memiliki empat channel masukan yang didesain untuk dapat menerima masukan level logika TTL. Masing-masing channel masukan ini memiliki channel keluaran yang bersesuaian. Gambar 2.14 memperlihatkan penampang IC L298. Dengan memberi tegangan 5 volt pada pin enable A dan enable B, masing-masing channel output akan menghasilkan logika high (1) atau low (0) sesuai dengan input pada channel masukan. Untuk lebih jelasnya prinsip kerja IC L298 dapat dilihat pada tabel 2.2.
Gambar 2.14 Penampang IC L298
Tabel 2.2 Tabel Logika Prinsip Kerja IC L298
Enable A,B Input 1,3 Output 1,3 Input 2,4 Output 2,4
1 0 0 0 0
1 1 1 1
0 0 x 0 x
1 x 1 x
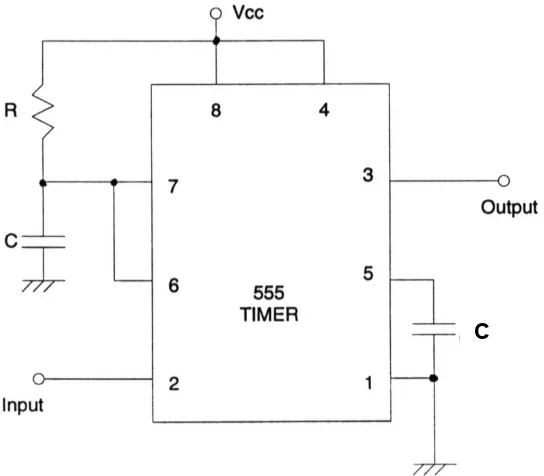
2.7 Driver Servo IC Timer 555
Timer 555 merupakan sebuah IC timer yang bekerja berdasar
komparator yang dirangkai dengan[8]. IC Timer 555 memiliki dasar pengendali PWM dengan fitur pengendalian lebar pulsa 0..100%, frekuensi osilator yang dihasilkan relatif stabil sehingga sangat mungkin digunakan untuk membangun Simple PWM Controler. Frekuensi dari Simple PWM Controler
555 akan membentuk output dengan frekuensi dari 170 sampai 200 Hz. Keluaran dari 555 pada rangkaian Simple PWM Controler 555 ini digunakan untuk driver pulsa PWM. Gambar 8.15 berikut memperlihatkan penampang IC Timer 555.
Gambar 2.15 Penampang IC Timer 555.
IC 555 memiliki dua jenis operasi, yaitu Multivibrator Monostabil dan Multivibrator Astabil. Multivibrator Monostabil juga disebut one shot, menghasilkan
output sebuah pulsa dengan periode tertentu ketika dipicu dengan sebuah pulsa
Gambar 2.16 Rangkaian Multivibrator Monostabil
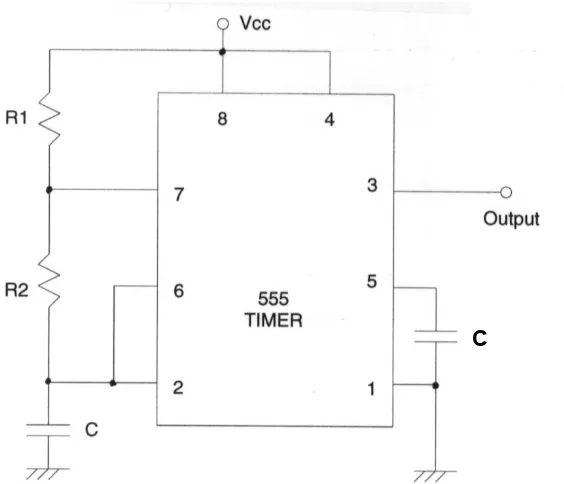
Multivibrator Astabil merupakan multivibrator yang mempunyai dua keadaan namun tidak stabil pada salah satu keadaannya selama sesaat dan kemudian berpindah ke keadaan yang lain, disini multivibrator astabil menetap untuk sesaat sebelum berpindah kembali ke keadaan semula [8]. Perpindahan keadaan pada output multivibrator astabil yang berkesinambungan ini menghasilkan suatu gelombang segi empat dengan waktu naik yang sangat cepat. Karena tak dibutuhkan sinyal masukan untuk memperoleh suatu keluaran, maka multivibrator astabil ini kadang-kadang disebut multivibrator bekerja bebas ( menunjukan rangkaian multivibrator astabil (Sumber: http://physics.usask.ca). Sedangkan Gambar 2.17 (a) dan (b) secara berurutan memperlihatkan output multivibrator monostabil dan multivibrator astabil.
Gambar 2.17 Rangkaian Multivibrator Astabil
(a)
(b)
Gambar 2.18 (a) Output Multivibrator Monostabil (b) Output Multivibrator Astabil
Trigger
Output
[image:38.595.157.465.426.678.2]BAB 3
PERANCANGAN SISTEM
Tahap Perancangan dibagi menjadi empat bagian utama, yaitu penentuan komponen yang digunakan, perancangan konstruksi robot IUV, perancangan perangkat kontrol dan perancangan software antarmuka pengendalian robot.
3.1 Komponen yang Digunakan
[image:39.595.109.527.496.740.2]Komponen yang digunakan dikelompok menjadi dua yaitu komponen fisik dan komponen elektronik. Komponen fisik digunakan untuk membentuk kerangka robot, bagian body utama, mekanis robot, dan bagian buoyancy. Sedangkan komponen elektronik digunakan untuk membangun sirkuit utama (main circuit ), bagian aktuator, dan perangkat kontrol. Berikut adalah tabel rincian dari peralatan dan komponen yang digunakan (Tabel 3.1, Tabel 3.2 dan Tabel 3.3).
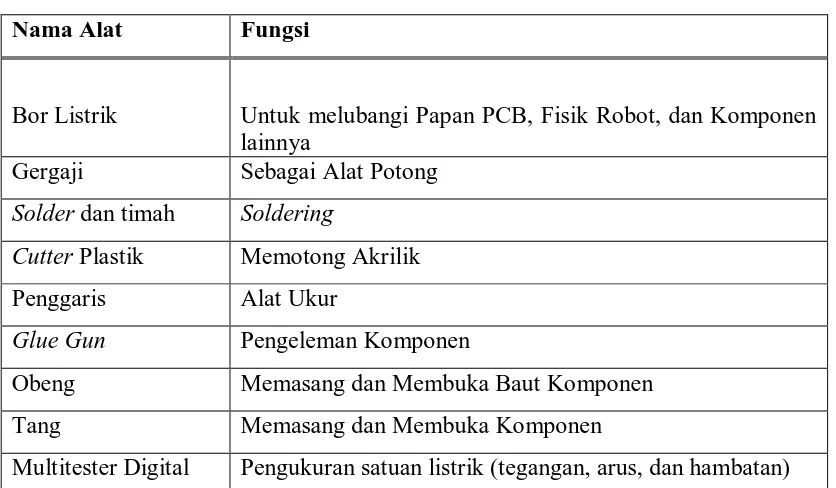
Tabel 3.1 Tabel Peralatan yang Digunakan
Nama Alat Fungsi
Bor Listrik Untuk melubangi Papan PCB, Fisik Robot, dan Komponen lainnya
Gergaji Sebagai Alat Potong
Solder dan timah Soldering
Cutter Plastik Memotong Akrilik
Penggaris Alat Ukur
Glue Gun Pengeleman Komponen
Obeng Memasang dan Membuka Baut Komponen Tang Memasang dan Membuka Komponen
Tabel 3.2 Rincian Komponen Fisik
Nama Spesifikasi Keterangan
Plywood (kayu lapis) Tebal 7,5 mm Base penguat tutup boks plastik
Baut
Diameter 0,8 cm,
panjang 13 cm Penguat tutup boks plastik Diameter 2 mm,
panjang 10 mm Memasang Gripper dan arm Diameter 2 mm,
panjang 15 mm
Memasang main circuit pada
base
Diameter 2 mm,
panjang 25 mm Memasang komponen mekanis Diameter 0,8 cm,
panjang 20 cm
Penguat tutup tabung pelindung kamera
Akrilik
Tebal 5 mm Base penguat tutup boks plastik
Tebal 2 mm Base sirkuit elektronik
Tebal 1,5 mm Gripper dan Arm
Tangki Plastik Volume 5 liter Tabung buoyancy
Boks Plastik Kedap Air Menempatkan komponen eletronik
Tabung Plastik Diameter 10 cm,
tinggi 15 cm Tabung pelindung kamera
Pipa PVC Diameter ½ inci Kerangka robot
Diameter ¼ inci Lengan mekanis (Arm) robot
Elbow PVC Diameter ½ inci Sambungan kerangka robot Lem epoxy Putih Melapis motor DC (waterproof)
Tabel 3.3 Rincian Komponen Elektronik
Nama Spesifikasi Keterangan
Webcam 1,3 Megapixel Kamera visual
Mikrokontroler AT89S52 Processor utama
Driver motor L298D Driver motor DC Motor DC 12 volt Aktuator Propeller
Kipas Elektronik Diameter Propeller 5 cm Propeller
IC Timer Timer 555 Driver servo
Motor Servo
8 Kg/cm Aktuator pompa hidrolik
4 Kg/cm Aktuator pompa hidrolik 1,5 Kg/cm Aktuator kamera
Toggle Switch 3 pin Saklar servo driver
Komponen Pasif Kapasitor, resistor, Kristal,
potensiometer Komponen sirkuit
Konektor USB Female Konektor kamera
Konektor DB-9 Female Konektor serial
Pin konektor Male Konektor
Black housing Female Konektor
Kabel UTP 6 meter Transmisi kamera
Kabel pelangi Isi 10, 6 meter Transmisi kontroler
3.2 Perancangan Konstruksi Robot IUV
Robot IUV yang akan dibangun dirancang agar dapat melakukan kegiatan di bawah
air dengan efisien dan aman. Ada beberapa hal yang menjadi fokus dalam tahap perancangan robot yaitu desain konstruksi robot, aktuator (komponen mekanis), main
circuit (sirkuit elektronik) dan perangkat lunak (software).
3.2.1 Desain Konstruksi Robot
Perancangan konstruksi robot berhubungan dengan beberapa komponen yaitu kerangka robot, bagian tabung/tanki (buoyancy), dan body utama robot (waterproof). Berikut adalah penjelasan dari masing-masing komponen tersebut.
3.2.1.1 Kerangka Robot
Kerangka adalah konstruksi robot yang akan menentukan desain, bentuk dan ukuran dari komponen fisik lainnya. Fungsi utama dari kerangka adalah sebagai tempat atau kedudukan untuk seluruh komponen robot. Disamping itu kerangka juga akan menentukan efisiensi kerja dari robot.
Untuk material kerangka robot dapat digunakan beberapa alternatif bahan seperti bahan dari logam, plastik, dan kayu [6]. Pemilihan material akan sangat
berpengaruh terhadap konstruksi robot seperti berat, kekuatan, ketahanan terhadap keretakan dan kemampuan meredam getaran. Perpaduan material yang baik dapat menghasilkan konstruksi yang kuat, ringan dan dapat meredam getaran.
Gambar 3.1 Rancangan Kerangka Robot IUV
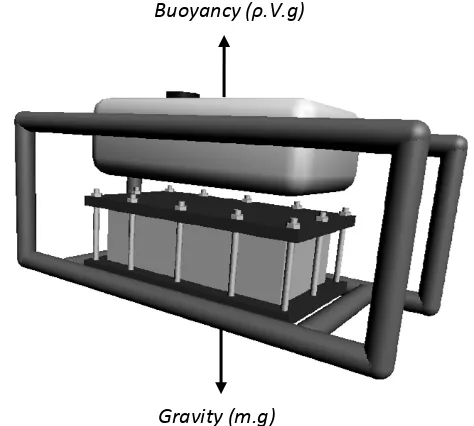
Kerangka robot yang dibuat mempertimbangkan posisi buoyancy (prinsip
archimedes) dan pusat massa (m) robot (gravity), kedua faktor ini akan menentukan
kestabilan robot dalam bergerak. Berikut adalah gambar titik buoyancy dan gravity pada kerangka robot (Gambar 3.2).
Gambar 3.2 Gaya Buoyancy dan Gravity
28 cm
40 cm
26,5 cm
Buoyancy (ρ.V.g)
3.2.1.2 Tabung Buoyancy
Tabung buoyancy adalah tabung yang berfungsi sebagai pengatur keseimbangan
antara efek buoyancy dengan gravity. Volume tabung ini dapat diatur agar massa jenis (ρ) robot sama dengan massa jenis air. Untuk merubah volume tabung dapat dilakukan dengan menambah dan mengurangi jumlah air di dalam tabung. Dengan demikian, nilai gaya buoyancy akan sama dengan gaya gravity.
Atau dapat ditulis, selisih antara gaya buoyancy dengan gaya gravity adalah sama dengan nol.
Dengan membuat efek dari kedua gaya ini mendekati (sama dengan nol), maka akan
meningkatkan tingkat kestabilan robot.
Tabung buoyancy umumnya dibuat menggunakan bahan yang ringan dan kuat terhadap tekanan di bawah air misalnya campuran steorofoam dengan carbon. Namun dapat juga menggunakan tangki yang terbuat dari logam atau plastik khusus. Pada desain robot IUV ini akan digunakan tangki yang terbuat dari plastik.
Tabung buoyancy ditempatkan pada bagian tengah atas robot. Hal ini bertujuan untuk menjaga kestabilan robot, karena dengan posisi ini akan membuat titik gaya
buoyancy robot berpusat pada satu titik. Garis gaya buoyancy harus sejajar dan
Gambar 3.3 Penempatan Tabung Buoyancy
3.2.1.3 Perancangan Body Utama Robot
Body robot berfungsi untuk menempatkan komponen elektronik (sirkuit utama) dan
komponen mekanis (motor servo). Bagian ini dirancang kedap air, agar komponen-komponen yang ada di dalamnya terlindung dari air. Body robot dibuat dengan menggunakan boks plastik, serta sebagai penguat penutup digunakan plywood dan
[image:45.595.220.416.587.715.2]akrilik, serta dilakukan pembautan pada sekeliling boks. Untuk memaksimalkan kekuatan penutup, maka celah penutup dilapisi dengan silicone cair. Berikut adalah gambar rancangan body utama robot (Gambar 3.4).
Gambar 3.4 Rancangan Body Utama
3.2.2 Perancangan Aktuator
Aktuator adalah komponen yang berfungsi untuk melakukan gerakan mekanis
berdasarkan input perintah dari mikrokontroler (processor). Robot IUV memiliki tiga komponen mekanis yaitu baling-baling (propeller), roda (wheel), lengan mekanis (manipulator) dan aktuator kamera. Masing-masing komponen ini akan diuraikan sebagai berikut.
3.2.2.1 Aktuator Propeller
Propeller adalah baling-baling yang digerakkan dengan tenaga mekanis (motor DC),
dan akan mengkonversi gerakan rotasi menjadi daya dorong. Daya dorong dihasilkan dari perbedaan tekanan antara bagian depan dan bagian belakang airfoil (lempengan pembentuk baling-baling). Fungsi propeller pada robot IUV adalah sebagai penggerak utama, baik gerakan horizontal maupun vertikal.
Penempatan propeller untuk gerakan horizontal adalah sejajar dengan diagonal kerangka, hal ini akan memudahkan pergerakkan berputar, maju dan mundur. Sedangkan, untuk gerakan vertikal propeller diletakkan pada bagian atas robot, dengan demikian pergerakan robot secara horizontal akan lebih stabil. Berikut ini adalah rancangan propeller robot IUV (Gambar 3.5).
(a) (b)
Propeller
Holder
(c) Desain Pergerakan Robot Menggunakan Propeller
Gambar 3.5 (a) Rancangan Propeller (b) Komponen Propeller (c) Desain Pergerakan Robot Menggunakan Propeller
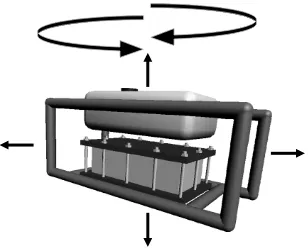
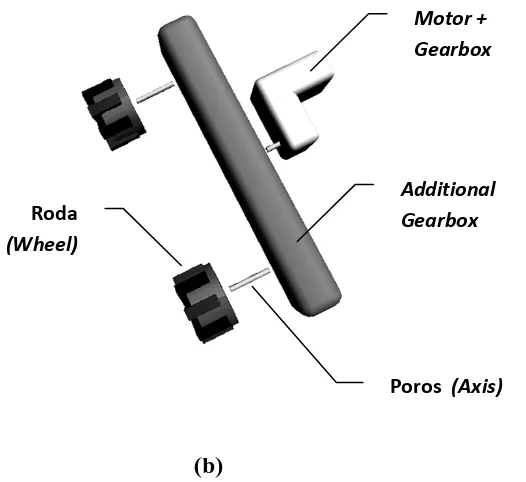
3.2.2.2 Aktuator Roda
Roda adalah aktuator yang akan digunakan oleh robot IUV untuk melakukan gerakan di dasar air. Untuk penggerak roda digunakan motor DC dan gearbox untuk meningkatkan torsi motor. Penggunaan roda sebagai aktuator adalah bersifat opsional, roda digunakan pada kontur dasar air yang memungkin untuk digunakan roda atau pada kondisi yang membutuhkan robot melakukan pergerakan di dasar air.
[image:47.595.158.466.109.360.2]demikian proses switching ini dapat dilakukan. Proses switching dilakukan secara manual menggunakan switch pada perangkat kontroler. Motor DC yang digunakan akan dikontrol oleh mikrokontroler melalui IC driver L298. Arah perputaran motor
akan ditentukan berdasarkan ouput dari IC L298. Berikut adalah skema proses
switching propeller horizontal dan wheel (Gambar 3.6). Sedangkan gambar 3.7 adalah
gambar rancangan fisik wheel.
Wheel Pin-1
Propeller Pin-1
Wheel Pin-2
Propeller Pin-2 Output-1 L298
Output-2 L298
Gambar 3.6 Skema Switching Aktuator Wheel
(b)
Gambar 3.7 Rancangan Fisik Wheel (a) Penampang Wheel (b) Komponen Aktuator Wheel
3.2.2.3 Aktuator Lengan Robot
Robot IUV dilengkapi dengan lengan yang digunakan untuk mengambil objek atau benda. Lengan memiliki dua bagian utama yaitu arm dan gripper. Gripper berfungsi sebagai jari atau capit untuk memegang objek.
Ada beberapa alternatif yang dapat digunakan sebagai aktuator untuk
manipulator robot seperti motor DC, servo, dan hidraulik. Robot IUV menggunakan kombinasi aktuator servo dan hidrauklik menggunakan prinsip prinsip pompa hidraulik, di mana manipulator beroperasi menggunakan pompa hidraulik, sedangkan pompa hidrauliknya didorong dengan menggunakan motor servo. Berikut adalah Prinsip kerja aktuator hidraulik (Gambar 3.8).
Additional Gearbox
Motor + Gearbox
Poros (Axis) Roda
Servo
(Gambar 3.8) Prinsip Kerja Aktuator Hidraulik
Berdasarkan gambar di atas dapat dilihat arah kerja tuas Pompa-1 (arah A dan arah B) adalah input bagi Pompa-2. Pompa-1 akan memompa Pompa-2 dengan arah
output-nya (pergerakan tuas Pompa-2) akan searah dengan input, dapat dilihat pada
gambar yaitu arah A’ sama arah A dan arah B’ sama dengan arah B. Sedangkan gambar 3.9 berikut adalah rancangan bentuk fisik manipulator untuk robot IUV.
Gambar 3.9 Rancangan Aktuator Lengan Pompa Hidraulik
Lengan (Arm) Gripper
Lengan
(Arm)
Pompa
3.2.2.4 Aktuator Kamera
Untuk keperluan pengubahan sudut pandang kamera, diperlukan aktuator yang dapat
bergerak dalam ukuran sudut tertentu. Contoh aktuator yang beroperasi berdasarkan satuan sudut adalah motor stepper dan motor servo. Oleh karena itu, sebagai aktuator kamera digunakan motor servo, motor ini akan mengarahkan sudut pandang atau posisi kamera pada sudut tertentu.
Ada dua sudut pandang kamera yang harus diatur oleh aktuator kamera yaitu posisi kamera normal dan posisi kamera mengarah ke manipulator. Sudut pandang normal adalah sudut pandang ketika robot beroperasi dalam keadaan tidak menggunakan manipulator dan hanya melakukan pergerakan normal. Sedangkan sudut pandang manipulator digunakan pada saat manipulator dioperasikan untuk mengambil objek, hal ini bertujuan untuk mengarahkan kamera agar sejajar dengan gripper manipulator sehingga akan membantu dan memudahkan pengamatan dalam mengambil objek. Berikut ini adalah gambar rancangan aktuator dan sudut pandang kamera (Gambar 3.10)
(a) (b)
Gambar 3.10 (a) Aktuator pada posisi Normal (b) Aktuator pada posisi mengarah ke Manipulator
Kamera Aktuator
(Servo)
3.2.3 Perancangan Sirkuit Elektronik
Perancangan sirkuit elektronik berhubungan dengan perancangan rangkaian power
supply, mikrokontroler, komunikasi serial, driver motor DC, dan driver motor servo.
Semua rangkaian tersebut disatukan pada sebuah pada papan sirkuit utama (main
circuit). Disamping itu, khusus untuk rangkaian driver servo aktuator manipulator
dibuat terpisah dari sirkuit utama.
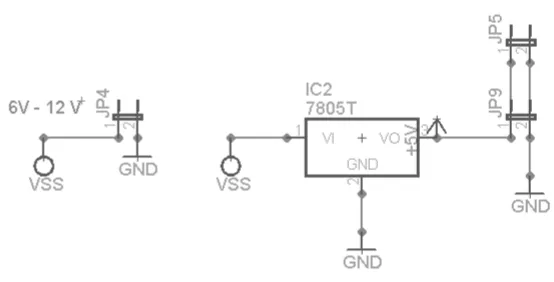
3.2.3.1 Rangkaian Sumber Tegangan
Agar sistem dapat bekerja maka dibutuhkan sumber tegangan (power supply). Ada dua jenis sumber tegangan yang digunakan yaitu sumber tegangan untuk sirkuit utama dan sumber tegangan untuk aktuator. Sirkuit utama membutuhkan tegangan 5 V untuk dapat beroperasi dengan stabil. Sedangkan aktuator menggunakan tegangan 12 V untuk propeller dan 5 V untuk motor servo.
[image:52.595.176.453.580.721.2]Sumber tegangan dapat diperoleh dengan beberapa cara seperti menggunakan adaptor AC – DC 1A – 5A dengan tegangan keluaran 6V – 12V atau menggunakan baterai (tunggal atau gabungan beberapa baterai) yang menghasilkan tegangan keluaran 6V – 12V. Untuk memperoleh tegangan 5V dari sumber tegangan 6V – 12V dapat digunakan IC regulator 7805, IC ini akan menghasilkan tegangan keluaran 5V. berikut adalah gambar rangkaian sumber tegangan (Gambar 3.11)
5 V
0 V
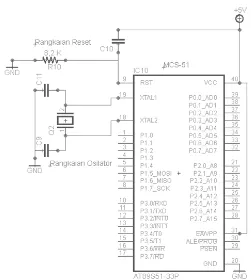
3.2.3.2 Rangkaian Mikrokontroler
Mikrokontroler digunakan sebagai pengendali utama robot IUV. Mikrokontroler akan
memproses input dari perangkat kontrol dan mengontrol semua aktivitas robot seperti pergerakan, sensing, dan komunikasi dengan perangkat kontrol. Rangkaian dasar yang digunakan untuk mengoperasikan sebuah mikrokontroler disebut sebagai rangkaian sistem minimum. Rangkaian sistem minimum terdiri dari rangakaian osilator,
rangkaian sistem reset, dan sumber tegangan.
Rangkaian osilator digunakan untuk menghasilkan sinyal clock dan pewaktuan bagi semua perangkat internal 8051. Untuk menyediakan clock, bisa digunakan rangkaian osilator internal ataupun pembangkit sinyal clock eksternal. Pin-pin XTAL1 dan XTAL2 menyediakan fungsi osilator. XTAL1 merupakan masukan untuk penguat osilator internal. Apabila digunakan pembangkit sinyal clock eksternal, pin ini berfungsi sebagai masukan. Pin XTAL2 dibiarkan mengambang. Berikut adalah gambar sinyal clock (Gambar 3.12).
Gambar 3.12 Sinyal Clock
Untuk membuat sinyal reset diterapkan rangkaian pada pin RST.
Mikrokontroler akan mereset apabila sinyal reset berada pada logika tinggi minimal selama dua siklus mesin (24 periode clock). Apabila mikrokontroler menerima sinyal reset yang valid, mikrokontroler akan menjalankan program awal (alamat 0000H) dan mengisi register-register fungsi khusus dengan data reset (default). Gambar 3.13
berikut adalah gambar sistem minimum mikrokontroler yang terdiri dari rangkaian
Gambar 3.13 Rangkaian Sistem Minimum
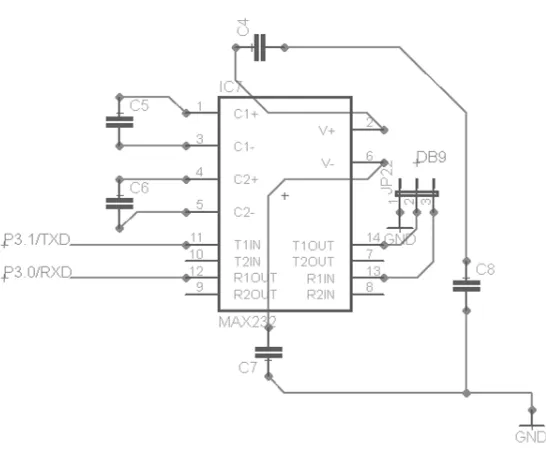
3.2.3.3 Rangkaian Driver Komunikasi Serial
Komunikasi serial yang dilakukan adalah antara perangkat kontrol (komputer) dengan mikrokontroler pengendali robot IUV. Koneksi serial pada komputer (PC) dilakukan dengan menggunakan port serial (DB9 male). Berbeda dengan mikrokontroler, dimana level digital pada port serial adalah level TTL (logika 1 dinyatakan sebagai 5 V dan logika 0 sebagai 0 V), port serial PC menggunakan level RS-232 (RS= Recommended
Standard). Dalam RS-232 logika 1 dinyatakan sebagai Mark dengan level tegangan
antara -3 dan -25 V (negatif), sedangkan logika 0 dinyatakan sebagai space dengan level tegangan antara 3 dan 25 V (positif). Dengan perbedaan level logika ini, port
Gambar 3.14 Rangkaian Driver Komunikasi Serial
3.2.3.4 Rangkaian Driver Motor DC
Untuk mengendalikan perputaran motor DC digunakan IC L298. IC ini akan menerima input dari mikrokontroler dan menghasilkan output yang bersesuaian. L298 mampu men-drive dua motor DC sekaligus. Untuk mengaktifkan IC L298 membutuhkan dua sumber tegangan yaitu sumber tegangan 5 V untuk enable chip dan
input-an (logic power supply) serta sumber tegangan yang kedua adalah sumber
Gambar 3.15 Rangkaian Driver Motor DC
3.2.3.5 Rangkaian Driver Aktuator Lengan dan Kamera
Aktuator Lengan (motor servo) memiliki rangkaian tersendiri yang terpisah dari sirkuit utama. Rangkaian ini adalah driver motor servo yang menggunakan IC 555 sebagai pembangkit sinyal kontrol untuk motor servo. Lebar sinyal kontrol servo ini akan ditentukan oleh nilai dari hambatan pada potensimeter yang dapat dirubah-rubah. Perubahan nilai hambatan ini akan menentukan sudut perputaran servo.
saklar diaktifkan untuk driver servo demikian sebaliknya untuk aktuator gripper. Berikut adalah gambar rangkaian driver motor servo IC 555 (Gambar 3.16).
3.2.3.6 Sirkuit Utama
Sirkut utama adalah gabungan dari beberapa rangkaian yaitu rangkaian power supply,
rangkaian sistem minimum mikrokontroler, rangkaian driver komunikasi serial, rangkaian driver motor DC, dan rangkaian driver motor servo. Rangkaian ini di integrasikan menjadi sebuah sirkuit utama (main circuit). Berikut adalah gambar rangkaian sirkuit utama (Gambar 3.17).
3.3 Perancangan Perangkat Kontrol
Perangkat kontrol (control device) adalah perangkat yang digunakan untuk
mengendalikan robot secara keseluruhan. Perangkat kontrol akan mengendalikan pergerakan robot (horizontal dan vertikal), posisi kamera (visualisasi), dan manipulator. Perangkat kontrol yang digunakan ada dua jenis yaitu perangkat kontrol utama, digunakan untuk mengontrol pergerakan robot, yang berhubungan langsung
dengan main circuit. Dan perangkat kontrol manipulator, untuk mengatur pergerakan lengan robot, berhubungan dengan rangkaian driver aktuator arm dan gripper. Berikut adalah penjelasan dari masing-masing rancangan perangkat kontrol.
3.3.1 Perangkat Kontrol Utama
Perangkat kontrol utama akan mengontrol pergerakan robot secara horizontal (propeller atau wheel), vertikal, dan posisi sudut pandang kamera. Kontrol horizontal adalah untuk pergerakan maju, mundur, rotasi, dan pergeseran (kanan dan kiri). Kontrol vertikal adalah untuk menyelam dan penganpungan (sink dan floating). Sedangkan posisi kamera dibagi menjadi dua yaitu, posisi normal dan posisi manipulator.
Perangkat kontrol menggunakan komputer (keyboard AT Standar) sebagai alat input kontrol ke mikrokontroler. Tombol keyboard yang digunakan sebagai input
Gambar 3.18 Tombol Kontrol Keyboard Kontrol Horizontal Kontrol Posisi Kamera
3.3.2 Perangkat Kontrol Analog
Perangkat kontrol Analog adalah perangkat kontrol yang digunakan untuk
mengendalikan lengan robot (aktuator gripper) dan aktuator kamera. Masing-masing aktuator (motor servo) akan dikendalikan oleh sebuah potensiometer (knop kontrol) yang digunakan untuk mengatur sudut perputaran aktuator. Untuk menghubungkan antara robot dengan perangkat kontrol akan digunakan konektor dan (umbilical)
[image:61.595.158.508.275.499.2]Berikut adalah rancangan perangkat kontrol Analog (Gambar 3.19).
Gambar 3.19 Rancangan Perangkat Kontrol Analog
Knop Kontrol
Konektor Umbillical
Konektor Serial (DB9)
Switch
Knop Kontrol
Konektor Umbillical
Konektor Serial (DB9)
3.4 Perancangan Perangkat Lunak Robot
Perangkat lunak yang dikembangkan dalam membangun sebuah robot IUV terbagi
menjadi dua, yaitu program mikrokontroler dan program kendali berbasis GUI (Graphical User Interface).
3.4.1 Perancangan Program Mikrokontroler
Program mikrokontroler adalah program yang ditanamkan ke dalam memori program (Flash Memory). Program dibuat dengan menggunakan bahasa assembly A51, yaitu bahasa mesin untuk mikrokontroler MCS-51. Program ini digunakan untuk mengatur pembacaan input dari perangkat kontrol dan pengendalian pergerakkan robot serta komunikasi dengan perangkat kontrol. Berikut adalah penjelasan dari masing-masing proses pada program mikrokontroler.
A, key A=’F’ MOV P1,#05H END Yes A=’B’ MOV P1,#0A0H A=’R’ MOV P1,#60H
No No
Yes Yes
A=’L’
MOV P1,#90H No
Yes CJNE A, Key
START
[image:62.595.144.491.417.733.2]SERIAL_RECEIVE No
Pembacaan input (read data) dari perangkat kontrol dilakukan dengan proses
scaning code (nilai variabel key dari output program komputer) yang diterima oleh
mikrokontroler secara serial melalui register buffer yang kemudian di-copy ke dalam
Akumulator. Nilai yang telah tersimpan pada akumulator akan dicek dengan rutin percabangan untuk menentukan perintah atau proses selanjutnya. Jika nilai A=’F’ (‘F’= kode ASCII karakter F sebagai konstanta pembanding) maka akan dilakukan proses eksekusi rutin Forward (robot bergerak maju). Namun, Jika nilai A yang
dibandingkan tidak sama dengan salah satu konstanta pembanding (‘F’= forward, ’B’= back, ‘R’= right, atau ‘L’= left) maka proses akan berpindah pada proses
decision yang berikutnya hingga diperoleh nilai A=konstanta. Demikian juga halnya
dengan proses pembacaan dan rutin gerak vertikal (gambar 3.21). Masing-masing konstanta ‘U’, ‘D’, ‘N’, ‘M’ mewakili penunjuk rutin Up, Down, Normal (posisi kamera normal), Manipulator (posisi kamera mengarah pada manipulator).
A, key
A=’U’
MOV P1,#05H
END
Yes
A=’D’
MOV P1,#0AH
No
Yes
CJNE A, key
No
START
[image:63.595.207.412.367.720.2]SERIAL_RECEIVE
Proses komunikasi dengan perangkat kontrol dilakukan secara serial, berikut adalah flowchart proses komunikasi serial asinkron mikrokontroler (Gambar 3.22).
END START
A, SBUF SERIAL_RECEIVE
[image:64.595.264.369.143.443.2]Mov A,SBUF Clr RI SERIAL_PORT_INIT
Gambar 3.22 Flowchart Komunikasi Serial
Pada flowchart di atas dapat dilihat bahwa pertama kali akan dieksekusi rutin Initserial untuk menginisialisasi komunikasi serial, proses inisialisasi ini meliputi penentuan mode komunikasi serial yang digunakan, mode timer, dan penentuan
baudrate (komunikasi asinkron). kemudian untuk menerima data dari perangkat
3.4.2 Perancangan Program Kendali Berbasis GUI (Graphical User Interface)
Program kendali GUI dirancang menggunakan pemrograman berbasis graphical user
interface, yaitu dengan menggunakan Borland Delphi 7. Adapun fungsi yang
dilakukan oleh program ini antara lain, menampilkan visual dari kamera dalam bentuk video, mengontrol komunikasi serial dengan robot IUV, dan sebagai program kendali utama yang disertai dengan indikator-indikator pengendalian robot.
Pemrograman Delphi menyediakan package yang dapat digunakan untuk menampilkan video visualisasi kamera yang di-capture melalui webcam atau perangkat visual kamera video lainnya. Package yang digunakan adalah VideoLab 4.5, yang memiliki library, yang mendukung untuk dapat melakukan video capture dan processing dengan lebih sederhana, package ini terdiri dari komponen-komponen yang dapat digunakan untuk fungsi video capture dan processing [12].
G
am
b
ar
3.
23
R
an
can
gan
I
n
ter
fa
ce
P
rogr
am
Berikut ini adalah flowchart program secara umum yang terdiri atas rutin-rutin yang berkaitan dengan proses visualisasi kamera, komunikasi serial, dan kendali robot Gambar 3.24.
SerialComSetup ()
OpenSerialCom ()
ProcedureKeyDown ()
Key= 38 ProcedureForward
Key= 40 ProcedureBack
Key= 39 ProcedureRight
Key= 37 ProcedureLeft
Key= 16 ProcedureUp
Key= 17 ProcedureDown
Key= 33 ProcedureNormal
Key= 34 ProcedureManipulator
ProcedureWriteDataSerial
END
VLDSCaptureEnable
VLImageDisplay
VLDSVideoLogger SelectVideoCaptureDevice START
Gambar 3.24 Flowchart Program Kendali GUI
Berdasarkan Gambar Flowchart (Gambar 2.24) di atas dapat dilihat bahwa, mula-mula program akan menjalankan prosedur SerialComSetup untuk membuat pengaturan komunikasi serial antara komputer dengan perangkat luar (serial
interfacing). Kemudian akan dilakukan enable Serial Communication melalui
BAB 4
IMPLEMENTASI DAN PENGUJIAN SISTEM
4.1 Implementasi Bagian Konstruksi Robot
Implementasi bagian fisik robot terdiri atas tiga bagian, seperti telah dibahas pada bab sebelumnya (perancangan sistem) yaitu kerangka robot, tabung buoyancy, dan body utama robot.
4.1.1 Implementasi Kerangka Robot
Kerangka robot diimplementasikan dengan menggunakan pipa berbahan PVC. Pipa PVC yang digunakan berukuran ½ inci. Alasan penggunaan pipa PVC adalah karena relatif ringan, kuat, tahan air (korosi), dan mudah dalam perangkaiannya. Secara keseluruhan peralatan dan bahan yang digunakan untuk membuat kerangka robot adalah pipa PVC, sambungan pipa elbow, sambungan pipa T, lem pipa PVC, dan gergaji.
Kerangka robot dibuat dengan bentuk dasar berupa kerangka balok, dengan dimensi panjang × lebar × tinggi adalah 40 cm × 26,5 cm × 28 cm. Tahap pengerjaannya terdiri dari persiapan peralatan dan bahan serta perakitan. Pertama pipa dipotong sesuai dengan ukuran dimensi. Untuk setiap bagian dimensi diperlukan
(a)
(c)
Gambar 4.1 Implementasi Kerangka Robot (a) Peralatan dan Bahan (b) Perakitan (c) Kerangka Robot
4.1.2 Implementasi Tabung Buoyancy
Tabung buoyancy yang digunakan adalah berupa jerigen plastik yang dapat diisi air. Pengisian air bertujuan untuk menyesuaikan massa jenis robot agar sama dengan massa jenis air. Tabung ini diletakkan dengan posisi pada bagian atas kerangka robot. Tabung ini akan dilekatkan pada kerangka robot dengan holder yang terbuat dari papan (Plywood). Berikut adalah gambar tabung buoyancy (Gambar 4.2).
Gambar 4.2 Tabung Buoyancy
Tabung (Jerigen) Plastik
4.1.3 Implementasi Body Robot
Hal terpenting yang dipertimbangkan untuk membuat body robot adalah ketahanan
terhadap air. Body utama robot dibuat dengan menggunakan boks plastik kedap air dan bagian penutup boks dilapisi dengan silikon cair (sillicone). Disamping itu, untuk meningkatkan kekuatan seal dan kekedapan boks, dilakukan penguatan pada sekeliling bagian penutup boks memasang baut.
Pada bagian dalam boks dibuat kedudukan untuk menempatkan papan sirkuit utama. Kedudukan ini dibuat dengan menggunakan papan akrilik. Berikut adalah gambar body utama robot (Gambar 4.3).
4.2 Implementasi Aktuator Robot
Robot IUV memiliki empat aktuator utama yaitu baling-baling (propeller), roda
(wheel), aktuator lengan mekanis, dan aktuator kamera. Berikut adalah penjelasan dari implementasi setiap komponen aktuator.
4.2.1 Implementasi Propeller
Propeller diimplementasikan menggunakan baling-baling yang dibuat dengan
memodifikasi kipas elektronik dan mengganti motor penggerak dengan menggunakan motor DC 12 volt. Motor DC yang digunakan untuk menggerakkan propeller dikontrol menggunakan IC driver L298.
Untuk membuat motor kedap air, maka motor dilapisi dengan seal (silicone). Tujuannya adalah agar tidak terjadi korosi dan hubungan pendek listrik (konsleting). Berikut adalah gambar implementasi propeller robot (Gambar 4.4)