Makalah Seminar Tugas Akhir
AKUISISI DATA DAN MONITORING SUHU MESIN, POSISI GIGI PERSNELING,
KEMIRINGAN MOTOR DAN MODE CDI PADA MOTOR BALAP
Agus Fiqih Amanu1, Iwan Setiawan, ST, MT. 2, Sumardi, ST, MT 2 Jurusan Teknik Elektro, Fakultas Teknik, Universitas Diponegoro
Jln. Prof. Sudharto, Tembalang, Semarang, Indonesia
ABSTRACT
Data acquisition and control system monitoring the motor racing today more in use, primarily by an experienced mechanic. Such devices are usually mechanical use Data Logger, which functions as a remote monitoring can even record the data in a kind of memory chip MMC. By knowing the data driven motor for the race then the mechanic can easily do the setup for the next race bike. But the price of such equipment is very expensive and even tens of millions of dollars, and such equipment has not been found in the local market Indonesia.
At this final duty conducted the manufacture and design tools that can transmit data and monitoring the temperature of the engine, The position of the gears,tilt motor and BRT CDI model with remotely using a pair of RF YS 1020UB ic chip that will be sending each other between the RF TX and RF RX. ATMEGA8535 microprocessor used to process data from the sensor output to the next can be send via TX (transiter ) YS 1020UB. RX (receiver) YS 1020UB serves as a receiver and will be on display on a laptop using software microsoft visual C # 2008 express edition. This software a lso equipped with data storage of monitoring results.
From the result showed that the distance can be traveled by the module YS 1020UB ie the extent to 110 meters when sending 8 data simultaneously. LM35 sensors are used to determine the temperature of the engine, carbon potentiometer is used to determine the position of the motor tilt, gear position switch is used to determine the position of the gears
keywords : YS-1020UB, ATmega 8535 Mikroprosesor, LM35 Sensor, Gear position switch
1
Mahasiswa Teknik Elektro Undip
2
Dosen Teknik Elektro Undip
I PENDAHULUAN
1.1 Latar Belakang
Balap motor road race merupakan olahraga otomotif yang cukup popular di Indonesia. Tenaga mekanik sepeda motor merupakan bagian dari masyarakat yang terus berkembang dan mengikuti perkembangan teknologi. Keberhasilan seorang pembalap tidak pernah terlepas dari dukungan tim mekanik. Motor balap yang ada di Indonesia merupakan motor harian yang telah dinaikkan spesifikasinya, dari spesifikasi standar keluaran pabrik diubah atau dinaikkan untuk mendapatkan kinerja dari mesin yang optimal. Para mekanik motor balap berusaha memodifikasi mesin motor untuk mendapatkan tenaga yang besar. Gambar 1.1 di bawah ini adalah contoh motor harian yang telah di naikkan spesifikasinya.
Modifikasi mesin tersebut akan efektif jika ditunjang dengan data monitorng beberapa komponen motor secara real time. Seperti mengetahui suhu mesin, kecepatan dan rpm motor balap ketika di kendarai. Salah satu kunci sukses pembalap -
pembalap motor di luar negeri adalah para mekanik mereka memiliki data - data komponen motor secara real time saat balapan di sirkuit.Data tersebut dapat di jadikan referensi untuk mengevaluasi hasil perlombaan. Peralatan monitoring secara real time tersebut harganya mahal dan belum ada di pasaran lokal di indonesia
Gambar 1.1 sepeda motor supra x-125 yang telah di modifikasi menjadi motor balap
1.2 Tujuan
informasinya di sajikan secara real time dan di simpan kedalam data berupa grafik.
1.3 Pembatasan Masalah
Pembatasan masalah pada Tugas Akhir ini adalah sebagai berikut:
1. Ruang gerak motor balap diujikan di wilayah kampus universitas diponegaro berjarak 400 m di depan gedung profesor sudarto SH. 2. Mikrokontroler yang digunakan adalah
mikrokontroler AVR ATmega 8535.
3. Bahasa pemrograman yang digunakan adalah bahasa C yang diadaptasikan pada software Code Vision AVR.
4. Motor balap yang digunakan adalah sepeda motor supra X-125 yang telah di modifikasi. 5. Untuk komunikasi data menggunakan
frekuensi radio YS-1020UB.
8. Sensor gear potition switch digunakan mengetahui posisi gigi persneling.
9. Sensor potensio carbon digunakan untuk mengetahui kemiringan motor.
10. Tidak membahas mekanik motor balap.
II DASAR TEORI
2.1 Sensor LM35
Sensor suhu digunakan untuk mengetahui besar suhu yang berada dalam mesin motor balap. Sensor suhu yang digunakan adalah IC LM35. IC ini akan mengubah nilai suhu menjadi besaran tegangan. Cakupan (range) suhu yang mampu dirasakan oleh LM35 adalah dari -55 oC sampai dengan 150 oC. Tegangan keluaran sensor ini akan mengalami perubahan 10 mV untuk setiap perubahan temperatur 1 C.
Vout = 10 mV x T...(2.1)
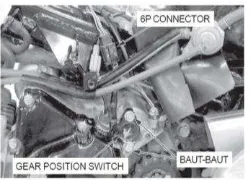
2.2 Gear position indicator / switch motor balab Gear position indicator merupakan sistem indikator gigi persneling pada motor balap. Peralatan ini berfungsi untuk mengetahui pada posisi berapa gigi persneling yang sedang digunakan pada motor balap. Gear position indicator menggunakan sensor gear position switch yang terletak pada mesin motor. Gambar visual dari gear position switch dan letak sensor ini dapat di lihat pada gambar 2.3 Di bawah ini
Gambar 2.2 Tampilan gear position swittch dan letaknya pada motor balap
2.4 Sensor Potensiometer
Potensiometer yang tersedia di pasaran terdiri dari beberapa jenis, yaitu: potensiometer karbon, potensiometer wire wound dan potensiometer metal film.
Gambar 2.3 potensiometer
2.5 CDI BRT
CDI BRT adalah sistem pengapian CDI digital yang dikendalikan oleh mikrokomputer agar Ignition Timing (waktu pengapian) yang dihasilkan sangat presisi dan stabil sampai rpm tinggi. Akibatnya pembakaran lebih sempurna dan hemat bahan bakar, serta tenaga yang dihasilkan akan stabil dan besar mulai dari putaran rendah sampai putaran tinggi. Untuk saklar penggerak yang digunakan dapat dilihat pada gambar 2.4
Gambar 2.4 Gambar visual CDI BRT di lengkapi dengan saklar penggerak
2.6 Radio Frekuensi (RF) modul YS-1020UB
Gambar 2.5 Modul radio YS-1020UB.
III PERANCANGAN PERANGKAT KERAS
DAN PERANGKAT LUNAK
3.1 Perancangan Perangkat Keras (Hardware)
Gambar 3.1 blog diagram keseluruhan sistem interkoneksi perangkat keras
Tiap-tiap bagian dari diagram blok sistem di atas dapat dijelaskan sebagai berikut:
1. Sensor suhu LM35 merupakan sensor yang akan digunakan untuk mendeteksi suhu mesin motor balap.
2. Sensor potensiometer carbon digunakan untuk mengetahui seberapa besar kemiringan motor balap.
3. Sensor gigi persneling di gunakan sebagai indikator untuk mengetahui pada posisi berapa gigi persneling yang sedang di pakai pada motor balab.
4. Saklar CDI BRT di gunakan untuk mengatahui mode CDI BRT yang sedang di gunakan oleh motor balap.
5. Mikrokontroler AVR ATMega8535 yang berfungsi sebagai pengendali pada sistem akuisisi data dan monitoring motor balap ini yang diprogram dengan menggunakan bahasa C.
6. YS 1020UB digunakan sebagai sarana untuk mengirimkan data secara wireless dari lokasi pemantauan ke tempat lain untuk dimonitor. 7. K-125i berfungsi membuat COM port virtual
pada komputer yang tidak mempunyai RS-232 port yang sebenarnya.
8. PC ( Personal Computer ) digunakan untuk menampilkan data monitoring sistem akuisisi
data pada motor balap ini. PC yang digunakan pada tugas akhir ini adalah laptop
3.1.2 Plant Indikator Suhu Mesin
Pemasangan plant sensor LM35 ini diletakkan pada bagian mesin motor yaitu di bagian blok silinder. Blok silinder terletak diantara kepala silinder dan bak engkol. Pada blok silinder ini terdapat lubang silinder, sirip pendingin mesin dan lubang saluran oli pelumas. Suhu yang dimonitor adalah suhu dari oli pemumas dimana bila suhunya mencapai 800 maka akan menyebabkan piston overhead ,apabila piston overhead maka akan menyebabkan matinya mesin. Alokasi port untuk sensor LM35 ini dapat dilihat pada gambar 3.2 Yaitu berada di port A di pin 7.
Gambar 3.2 Alokasi port sensor suhu pada microkontroler
3.1.3 Plant Indikator Kemiringan Motor Balap
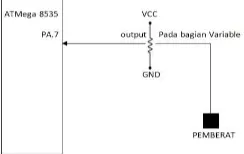
Untuk mengetahui seberapa besar kemiringan motor balap dalam tugas akhir ini menggunakan sensor potensiometer carbon. Sensor ini berfungsi untuk mengubah resistansi atau hambatan yang mengakibatkan tegangan pembanding berubah terhadap tegangan reverensi atau tegangan acuan . Pemasangan plant sensor potensiometer ditempatkan berada di atas karburator. Sensor ini di hubungkan dengan pemberat, dengan berubahnya kemiringan posisi sepeda motor, maka pemberat akan mempertahankan posisinya sehingga menggerakkan putaran potensiometer. perubahan kemiringan sepeda motor sebanding dengan putaran potensiometer.
Gambar 3.3 Alokasi port sensor potensiometer pada microkontroler
3.1.4 Plant Indikator CDI BRT
mikrokontroler untuk selanjutnya status mode posisinya akan dimonitoring melalui tampilan laptop.
Gambar 3.4. Alokasi port pada mikrkontroler
3.1.5 Plant Indikator Gigi persneling
Gear position indicator menggunakan sensor gear position switch yang terletak pada mesin motor. Sensor ini memiliki 5 inputan yang dihubungkan pada caps/spring. Prinsip kerjanya yaitu apabila gigi persneling di rubah posisinya maka akan merubah posisi dari caps/spring, perubahan posisi dari caps/spring akan terbaca oleh salah satu dari 5 inputan sensor dan akan di tampilkan pada Gear position indicator.
Gambar 3.5 Alokasi port pada mikrkontroler
3.2 Perancangan Software
3.2.1.Perangkat Lunak pada AVR ATmega 8535
Diagram data flow di bawah adalah menggambarkan aliran diagram data pada bagian transmiter (pengirim).
Gambar 3.6 Diagram data flow monitoring pada bagian transmiter
( pengirim )
Dari data flow monitoring di atas dapat di jelaskan tiap bagianya sebagai berikut :
Pembacaan sensor suhu LM35
untuk diagram alir program pembacaan sensor LM35 dapat dilihat pada gambar 3.7
Gambar 3.7 Diagram alir program indikator suhu
Pembacaan posisi gigi persneling
untuk diagram alir program pembacaan posisi gigi persneling dapat dilihat pada gambar 3.8
Gambar 3.8 Diagram alir program indikator gigi persneling
Pembacaan switch utuk mode CDI BRT
Gambar 3.9 Diagram alir program mode CDI BRT
Pembacaan sensor potensiometer karbon
untuk diagram alir program pembacaan posisi gigi persneling dapat dilihat pada gambar 3.10
Gambar 3.10 Diagram alir program kemiringan motor balap
3.2.2.Pembuatan Tampilan dengan Microsoft
visual C# 2008 Expres Edition
Diagram data flow di bawah adalah menggambarkan aliran data pada bagian receiver (pengirim).
Gambar 3.11 Diagram dataflow monitoring pada bagian transmiter ( pengirim )
Dari gambar di atas dapat di jelaskan bahwa RF Modul receiver (penerima) akan menerima sinyal frekuensi dari RF Modul transmiter (pengirim) untuk selanjutnya di kirimkan ke laptop melalui modul K-125i. Pada tampilan microsoft visual c# data monitoring di tampilkan dalam tiga bentuk yaitu
dalam bentuk tampilan analog, dalam bentuk grafik dan dalam bentuk diagram yang dapat disimpan datanya.
Gambar 3.12 tampilan mikrosoft visual c# berupa tampilan analog
Gambar 3.13 tamplan mikrosoft visual c# berupa grafik
Gambar 3.14 tampilan mikrosoft visual c# berupa diagram yang dapat di simpan datanya
IV PENGUJIAN DAN ANALISA
4.1 Pengujian dan Analisa Sistem Telematri
dan Antarmuka
Hasil percobaan menunjukan bahwa data dapat dikirimkan dengan baik secara wierless dengan jarak 110 meter untuk di luar ruangan dan 50 meter untuk di dalam ruangan. Jarak hasil percobaan tidak sesuai dengan datasheet dikarenakan data yang dikirimkan berjumlah 7 parameter dan letak YS-1020UB yang di letakkan tertutup di dalam bagasi motor.
4.2 Pengujian dan Analisa suhu mesin
Hasil grafik terlihat pada gambar berikut:
Gambar 4.1 Grafik perbandingan pembacaan suhu pada laptop dan termometer
4.3 Pengujian dan Analisa gigi persneling
Tabel 4.2 Perbandingan pembacaan penunjukan laptop dan penunjukan gigi persneling pada motor
Hasil grafik terlihat pada gambar berikut:
Gambar 4.2 Grafik perbandingan pembacaan gigi persneling pada Laptop dan pada sepeda motor
4.4 Pengujian dan Analisa kemiringan motor
Tabel 4.3 Perbandingan pembacaan kemiringan motor pada Laptop dan busur derajad
Hasil grafik terlihat pada gambar berikut:
Gambar 4.3 Grafik perbandingan pembacaan kemiringan pada Laptop dan busur derajad
4.5 Pengujian dan Analisa Mode CDI
Tabel 4.4 Perbandingan pembacaan mode CDI BRT motor pada Laptop dan pada saklar
4.6 Pengujiana dan analisa sistem secara
keseluruhan
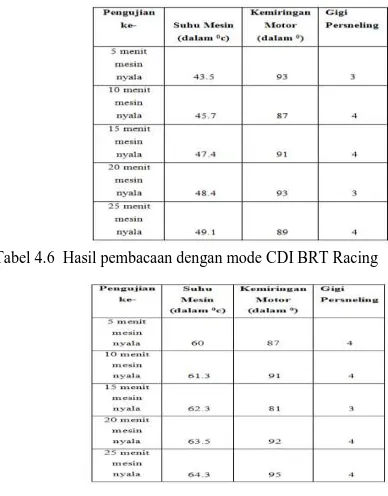
Tabel 4.5 Hasil pembacaan dengan mode CDI BRT Tune up
Tabel 4.6 Hasil pembacaan dengan mode CDI BRT Racing
Tabel 4.7 Hasil perbandingan suhu mesin dengan mode tune up dan mode racing
Dari tabel tersebut dapat di buat ke dalam bentuk grafik. Hasil grafik terlihat pada gambar berikut:
V PENUTUP
5.1 KESIMPULAN
1. YS-1020UB digunakan sebagai sarana untuk mengirimkan data secara wireless dari lokasi pemantauan ke tempat lain untuk dimonitor. Jarak yang bisa di tempuh yaitu sebesar 110 m di luar ruangan dan 50 m di dalam ruangan, Jarak hasil percobaan tidak sesuai dengan data sheet di karenakan data yang di kirimkan berjumlah 8 parameter dan letak YS-1020UB yang di letakkan tertutup di dalam bagasi motor.
2. Dari hasil pengujian diketahui nilai eror pada pengujian kemiringan sebesar 3,2 cm hal ini dikarenakan sensor yang di pakai adalah sensor ptensiometer dimana sensor ini memiliki kepresisian yang kurang baik. 3. Dari hasil pengujian diketahui nilai eror
sensor LM35 sebesar 3,1 0 C hal ini di karenakan letak sensor yang berada di bagian mesin mudah terpengaruh oleh adanya goncangan saat motor berjalan.
1. Jarak monitoring yang bisa di capai peralatan ini hanya sejauh 110 meter, untuk penyempurnaan peralatan ini dapat menggunakan peralatan wearles yang jaraknya bisa lebih jauh.
2. Sistem yang di monitoring dalam tugas akhir ini berjumlah 7 data monitoring yaitu kecepatan motor, suhu mesin, posisi gigi persneling, posisi kemiringan motor, mode CDI BRT, breaking sistem dan level bahan bakar. Untuk penyempurnaan peralatan monitoring motor balap ini dapat dengan menambahkan data yang di monitoring yaitu semisal di tambahkan dengan memonitoring RPM motor.
3. Untuk kemiringan motor kepresisian pengukuran masih kurang untuk itu bisa di sempurnakan dengan menggunakan sensor yang memiliki kepresisian lebih baik.
4. Untuk penyempurnaan peralatan ini dapat ditambahkan GPS,GPS dapat di fungsikan sebagai penampilan traking motor balap.
DAFTAR PUSTAKA
[1] Darmawan, Erico., Pemrograman Dasar C - Java - C#, Penerbit Informatika, Bandung, 2010.
[2] Heryanto, M.Ary dan Wisnu Adi P.,
Pemrograman Bahasa C untuk Mikrokontroler ATMEGA8535, Penerbit Andi, Yogyakarta, 2008.
[3] IMI, Ikatan Motor Indonesia., Peraturan balap motor, Penerbit ikatan motor indonesia (IMI),jakarta,2006
[4] Jaenudin, “Belajar Sendiri .Net dengan Visual
C# 2005”,Penerbit Andi,Yogyakarta,2006
[5] Joni, I Made dan Budi Harharjo, Pemrograman C dan Implementasinya, Penerbit Informatika, Bandung, 2006.
[6] RS, Northop., Teknik Reparasi Sepeda Motor, Penerbit Pustaka setia,Bandung,2000.