Prototype Kapal Selam Untuk Monitoring Sistem Bawah Laut Rouv(Remotely Operated
Underwater Vahicle)
Wiralfi Tasnim
1, Arif Gunawan,S.T.,M.T
2& Wakhyu Dwiono S.T., M.T
1
Jurusan Teknik Elektronika Telekomunikasi, Program Studi Teknik Elektronika Telekomunikasi.
Politeknik Caltex Riau
Jl Umban Sari No.1 Pekanbaru 28265
Abstrak— Perkembangan remotely operated under water (ROUVs) saat ini semakin pesat, hal ini disebabkan oleh kebutuhan akan suatu alat yang dapat memantau kondisi bawah air semakin besar. Wujud nyata dari ROUVs tersebut adalah kapal selam yang pengontrolannya dapat dilakukan dari darat menggunakan Smartphone android. Prototype kapal selam memiliki suatu sistem yang dapat tenggelam atau mengapung di dalam air. Sistem tersebut diadaptasi dari kapal selam konvensional yang menggunakan tabung ballast yang menjadi bagian penting yang digunakan untuk menyelam dan mengapung. Apabila kapal selam ingin tenggelam maka berat dari benda harus lebih besar dari pada gaya dorong keatas dari fluida, untuk mencapai kondisi tersebut air harus diisi kedalam tabung ballast. Sedangkan saat kapal ingin terapung maka berat dari kapal selam harus lebih kecil dari pada gaya dorong keatas dari fluida, oleh karena itu air dalam tabung ballast harus dikeluarkan. Microcontroller ATMega 8535 mengatur pergerakan dan akselerasi dari kapal selam. Untuk dapat bergerak maju kapal selam dipasang sebuah bilge pump yang dapat memberikan dorongan besar namun memiliki konsumsi daya sama dengan motor DC. Setelah dilakukan pengujian Kondisi yang dicapai adalah kapal selam dapat terapung apabila air didalam tabung ballast kosong dan kapal akan tenggelam dengan kedalaman 4 cm apabila air yang ada didalam tabung ballast terisi penuh. Konsumsi arus total dari perangkat kapal selam sebesar 3.3 Ampere.
Kata kunci : ROUVs, ballast, Microcontroller ATMega 8535, bilge pump
Abstract Nowadays, the development of Remotely operated under water vehicle (ROUVs) is growing fast.It because the need of a tool which is able to detect the situation in coral. The real form of ROUVs is submarine where the controling can be done from the surface used smartphone android. Prototype Submarine has a system which is able to dive or float in the water. The system was adapted from conventional submarines that using ballast tubes as an important part used to dive and float.The weight of the thing should be bigger than the up thrust of the fluid when the submarine is going to be dive. It can be happen if the water has already fill to the tube of ballest and also vise versa. The weight of the thing should be smaller than the up thrust of the fluid when the submarine is going to be float. The consequence, the water in the tube of ballast should be removed. Microcontroller ATMega 8535 control the movement and acceleration of the submarine To make it moving forward, submarine fitted a Bilge pump that can provide a huge boost but it has the same power consumption with a motor DC. After having a testing, the results shows that submarine can be float if the ballast is empty andit can be sink in 4 cm from surface of the water if the ballast full of water. The Current Total consumption that using in submarine is 3.3 Ampere.
I.
PENDAHULUANSebuah robot dapat digunakan untuk memantau kondisi bawah laut semisal patahan akibat dari pergeseran lempengan bumi. Penggunaan robot disini karena jika dikerjakan oleh manusia akan membahayakan keselamatan manusia tersebut.
ROUVs atau remotely operated under water vehicle adalah sebuah kendaraan yang dioperasikan dibawah air dan berfungsi untuk memantau kondisi serta mengirim data berupa gambar atau pun video. ROUVs ini dapat menggantikan penyelam dalam memantau kondisi bawah laut serta memiliki keunggulan dalam mengambil data serta daya jelajah yang lebih luas. Berdasarkan uraian diatas maka mahasiswa termotivasi untuk membuat proyek akhir dengan judul “Prototype Kapal Selam Untuk Monitoring Sistem Bawah Laut ROUVs (Remotely Operated Underwater Vahicle).” Alat ini bermanfaat untuk melihat kondisi patahan setelah terjadinya pergeseran lempeng bumi, dengan pengiriman data berupa video atau pun gambar.
A. Tujuan
Membuat sebuah prototype kapal selam yang dapat memonitoring sistem bawah laut dan dapat mengirim video serta gambar secara real time pada ground sistem.
B. Perumusan Masalah
1. Merancang sebuah sistem yang kedap air sehingga tidak terjadi short circuit.
2. Merancang rangka kapal selam dengan baik agar kapal selam tersebut dapat seimbang ketika diluncurkan dalam air.
3. Merancang tabung ballast yang digunakan oleh kapal selam untuk dapat tenggelam dan mengapung.
4. Mengatur supply daya yang digunakan oleh masing-masing motor sehingga penggunaan battry lebih effisien.
C. Batasan Masalah
1. Pengujian dilakukan pada kolam yang tenang dengan kedalaman tidak lebih dari 2m. 2. Pengaruh tekanan air terhadap kapal selam diabaikan.
II.
TINJAUAN PUSTAKA A. Prinsip Kerja Kapal SelamKapal selam adalah sebuah kapal yang memiliki daya apung yang sedikit positif, namun dapat menyelam dengan cara mengubah daya apungnya menjadi netral atau sedikit negatif. Berikut adalah penjelasan tentang prinsip kerja kapal selam.
B. ROUVs
ROUVs atau remotely operated underwater vehicle adalah sebuah kendaraan bawah air yang dikontrol dari atas melalui sebuah tether. Perbedaan dengan menggunakan remote control adalah tempat pengoperasian nya, remote control digunakan untuk pengontrolan didarat maupun diudara sedangkan ROUVs digunakan untuk pengoperasian bawah air. Biasanya sebuah ROUVs dikendalikan dari atas kapal karena tujuan utama dari ROUVs untuk mengamati kondisi bawah air tanpa melakukan proses penyelaman. Meskipun menggunakan remote control, ROUVs tetap menggunakan kabel yang berfungsi untuk mengirimkan data berupa video maupun gambar serta sinyal listrik yang bergerak dua arah dari operator ke TMS. TMS atau tether management system (TMS) berada pada permukaan air. ROUVs banyak digunakan untuk misi pertahanan dalam militer, surveillance ataupun misi kegiatan bawah laut lainnya.
Gambar 1. ROUVs(remotely operated menghemat penggunaan daya listrik, dibawah ini adalah gambar konfigurasi ATMega 8535.
D. Bilge Pump
Salah satu kekurangan dari motor Brushless adalah ketidak mampuan motor untuk beroperasi dibawah air, karena short circuit dapat berakibat fatal yakni kerusakan pada motor.Untuk menghindari kemungkinan terburuk yakni kerusakan pada motor, maka digunakanlah bilge pump atau pompa bilge. Pompa ini biasa digunakan oleh kapal untuk menguras air yang berada didalam dek untuk selanjutnya dibuang ke laut. Pompa bilge memiliki katup yang dapat membuka serta menutup jalur pembuangan serta untuk menghisap air. kemampuan untuk membuang air ini menghasilkan gaya dorongan ketika dioperasikan didalam air, sehingga dapat menggantikan dorongan yang dihasilkan oleh motor brushless. Dengan kemampuan menghasilkan semburan mulai dari 360 galon dalam satu jam atau sekitar 1393 liter dalam satu jam kemampuan dari pompa bilge ini tidak diragukan lagi dalam memberikan dorongan yang dibutuhkan oleh kapal selam.
.
Gambar 3. pompa bilge 500 GPH
Sumber : http://www.amazon.com/Rule-Bilge-Pump-Motor-Cartridge/dp/B001446X52
(diakses tanggal 11-15-2012)
Selain itu dimensi dari pompa bilge ini juga variatif sesuai dengan kebutuhan, mulai dari dimensi terkecil yakni hinght;width;weight (4;6;0.5kg) sampai dengan (9;6;4.9kg). tegangan yang dibutuhkan oleh satu buah pompa bilge adalah 12 V dengan arus sebesar 1 A.
E. ModulEthernetWIZ110SR
WIZ110SR adalah modul gateway yang mengkonversi protokol RS-232 ke protokol TCP / IP. Hal ini memungkinkan kontrol perangkat melalui jaringan berbasis pada ethernet dan TCP / IP dengan menghubungkan ke peralatan yang ada dengan RS-232 serial interface. (WIZNET, 2007, hal. 5).
Bentuk fisik dari modul ethernet WIZ110SR dapat dilihat pada Gambar 2.6
Gambar 4. Modul ethernet WIZ110SR Sumber: WIZ110SR User’s Manual
III.
PERANCANGAN A. Blok DiagramBerikut ini adalah skema sederhana pengerjaan alat yang akan dibuat:
Gambar 5. blok diagram alat B. Cara Kerja Alat
sirkuit.Pengontrolan dilakukan menggunakan smart phone android, access point berguna sebagai jembatan penghubung antara kapal selam dengan smart phone android, untuk komunikasi dari HP ke access point via wireless sedangkan dari access point ke kapal selam menggunakan kabel cross. Pada kapal data dari access point di terjemahkan oleh modul Ethernet WIZ110SR yang menkonversi RS-232 ke protokol TCP / IP.
C. Mekanik
Gambar 6. Rangka Kapal Selam Tampak samping
Gambar 7. Rangka Kapal Selam Tampak atas
Gambar 8. Rangka Kapal Selam Tampak depan
D. Rancangan Driver
Driver ini berguna untuk mengontrol pompa yang ingin diaktifkan, disini digunakan relay sebagai media switching, relay
dapat aktif ketika relay menerima tegangan dari mikro. Port yang diaktifkan tergantung kepada nilai karakter yang diterima dari hp android.
Gambar 9. Rangkaian Driver Bilge
E. Rancangan Pengontrolan
Data yang diterima dari device terminal berupa karakter, yang akan diolah oleh microcontroller ATmega 8535. Karakter tersebut adalah “1”, “2”, “3”, “4”, “5” untuk mengaktifkan relay. Karakter “1” untuk mengaktifkan Bilge A, agar kapal turun kebawah, karakter “2” untuk mengaktifkan bilge B dan bilge C dan kapal bergerak lurus, karakter “3” untuk mengaktifkan bilge B agar kapal berbelok kiri, karakter “4” untuk mengaktifkan merupakan softwere pendukung
wiznet 110 sr, pengujian berupa pengiriman karakter dari 1-5 dan melihat port yang aktif berdasarkan program yang telah ditanam pada atmega 8535. Program penerima dibuat pada CodeVision AVR sebagai berikut:
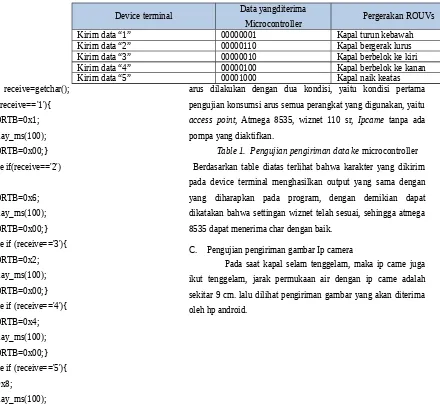
Table 4.1 Pengujian pengiriman data ke microcontroller Berdasarkan tabel diatas terlihat bahwa karakter yang dikirim pada device terminal menghasilkan output yang sama dengan yang diharapkan pada program, dengan demikian dapat dikatakan bahwa settingan wiznet telah sesuai, sehingga atmega 8535 dapat menerima karakter dengan baik.
B. Pengujian Konsumsi Arus Perangkat Kapal Selam
Pengukuran arus dilakukan dengan menggunakan amperemeter yang dihubungkan secara seri pada beban. Pengujian konsumsi
arus dilakukan dengan dua kondisi, yaitu kondisi pertama pengujian konsumsi arus semua perangkat yang digunakan, yaitu access point, Atmega 8535, wiznet 110 sr, Ipcame tanpa ada pompa yang diaktifkan.
Table 1. Pengujian pengiriman data ke microcontroller Berdasarkan table diatas terlihat bahwa karakter yang dikirim pada device terminal menghasilkan output yang sama dengan yang diharapkan pada program, dengan demikian dapat dikatakan bahwa settingan wiznet telah sesuai, sehingga atmega 8535 dapat menerima char dengan baik.
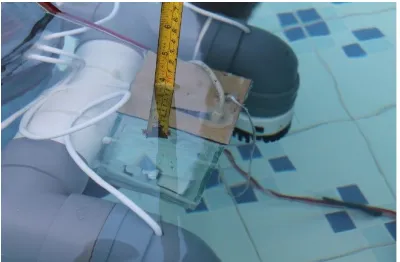
C. Pengujian pengiriman gambar Ip camera
Pada saat kapal selam tenggelam, maka ip came juga ikut tenggelam, jarak permukaan air dengan ip came adalah sekitar 9 cm. lalu dilihat pengiriman gambar yang akan diterima oleh hp android.
Device terminal
Data yang diterima
Microcontroller Pergerakan ROUVs
Kirim data “1” 00000001 Kapal turun kebawah
Kirim data “2” 00000110 Kapal bergerak lurus
Kirim data “3” 00000010 Kapal berbelok ke kiri
Kirim data “4” 00000100 Kapal berbelok ke kanan
Kirim data “5” 00001000 Kapal naik keatas
Device terminal Data yangditerima
Microcontroller Pergerakan ROUVs
Kirim data “1” 00000001 Kapal turun kebawah
Kirim data “2” 00000110 Kapal bergerak lurus
Kirim data “3” 00000010 Kapal berbelok ke kiri
Kirim data “4” 00000100 Kapal berbelok ke kanan
Gambar 11. pengukuran jarak kamera terhadap permukaan air Gambar masih terkirim dengan baik, tanpa ada terputusnya koneksi, dengan demikian dapat terlihat bahwa ip came masih dapat mengirim gambar didalam air pada kedalaman tidak lebih dari 9 cm.
Gambar 12. penerimaan gambar Ip camera
output yang gelap disebabkan kamera kekurangan cahaya pada saat didalam air, jika dibandingkan pada saat kamera berada diatas, gambar terlihat lebih jelas karena cahaya yang cukup untuk diterima oleh lensa ip came.
D. Pengujian Kecepatan Kapal Selam
Pengujian dilakukan pada kolam yang airnya relative lebih tenang, hal ini untuk menhindari kemungkinan kapal tidak terbawa arus ataupun gelombang yang menyebabkan kapal tidak stabil. Dari pengujian yang telah di lakukan, terlihat kecepatan kapal serta akselerasi kapal.
Tabel 2. Pengujian kecepatan kapal selam sebelum menyelam dengan jarak tempuh 5m
Tabel 3.
Pengujian kecepatan kapal selam setelah
menyelam dengan jarak tempuh 5m
Pengujian ke : Waktu tempuh
Pengujian pertama 16s
Pengujian Kedua 21s
Pengujian ketiga 20s
Pengujian keempat 19s
Tabel 4. Pengujian kecepatan akselerasi kapal selam sebelum menyelam dengan jarak tempuh 5m
Pengujian ke : Waktu Tempuh
Pengujian pertama 10s
Pengujian Kedua 12s
Pengujian ketiga 11s
Pengujian keempat 13s
Dari table diatas terlihat bahwa kecepatan kapal dalam berakselerasi dibawah air berkurang jika dibandingkan pada saat kapal belum menyelam. Hal ini disebabkan kemampuan pompa bilge yang berkurang seiring dengan bertambahnya kedalaman yang dicapai pompa.
V.
KESIMPULANDAN SARANA. Kesimpulan
Setelah melakukan pengujian pada sistem proyek akhir ini, maka diperoleh beberapa hal yang dapat disimpulkan, yaitu: a. Sebelum kapal selam di gabungkan dengan perangkat
android, pengiriman data dapart dilakukan dengan menggunakan device terminal.
b. Konsumsi arus terbesar diperoleh pada saat beberapa pompa bilge digunakan secara bersamaan.
c. Kecepatan akselerasi dari kapal selam dipengaruhi oleh kemampuan pompa bilge menyemburkan air, sedangkan kemampuan dari pompa bilge mengeluar kan air bergantung kepada kedalaman yang dicapai oleh kapal.
B. Saran
Untuk penyempurnaan proyek akhir ini, maka ada beberapa saran dari penulis, yaitu :
1. Dalam perancangan proyek akhir ini, rancangan mekanik berupa rangka kapal selam sangat mempengaruhi. Oleh karena itu perlu diperhatikan gaya berat dari kapal selam dengan gaya dorong keatas.
2. Metode penyelaman dinamis dinilai lebih efektif dibandingkan dengan metode penyelaman dinamis.
VI.
DAFTAR PUSTAKA[1]. Gino. (2012). Kontrol Robot Mobil Melalui Android SmartPhone dengan Wi Fi sebagai Media Remote: Politeknik Caltex Riau
[2]. Saputra.Oky.(2011). Tricopter Pemantau Daerah Bencana: Politeknik Caltex Riau
[4]. Wardhana, Lingga. (2006). Belajar Sendiri Microcontroller AVR Seri ATMega8535. Yogyakarta: Andi
[5].http://www.amazon.com/Rule-Bilge-Pump-Motor-Cartridge/dp/B001446X52 (diakses tanggal 11-15-2012) [6]. www.offshoretechnology.com