Abstrak— Terminal transit BBM ( bahan bakar
minyak) merupakan fasilitas yang digunakan untuk mendistribusikan bahan bakar dari kilang minyak kepada truk tangki.Pada jalur distribusi premium menuju filling
shed, terjadi fenomena kavitasi pada pompa distribusi filling shed. Fenomena kavitasi tersebut diakibatkan oleh
suplai bahan bakar dari tangki timbun menuju filling shed tidak satu fasa, melainkan dua fasa yaitu fasa cair dan gas. Hal ini dikarenakan suplai bahan bakar dari tangki penimbunan berkurang tekanannya. Berdasarkan hal tersebut, maka dirancang suatu sistem pengendalian level tangki timbun bahan bakar premium di TBBM Pertamina Manggis Bali. Pengendalian level tangki dilakukan dengan cara mengatur MOV yang ada pada Tangki timbun dengan metode switching control. Untuk melakukan
switching diperlukan kontrol berbasis logika. Berdasarkan
hasil simulasi penurunan level tangki untuk kondisi empat pompa aktif membutuhkan waktu 3500 detik. Untuk kondisi tiga pompa aktif membutuhkan waktu 4750 detik. Untuk kondisi dua pompa aktif membutuhkan waktu 9300 detik. Untuk kondisi satu pompa aktif membutuhkan waktu 37000 detik.
Kata kunci - Level, Tangki Timbun BBM, Switching control, kontrol berbasis logika
I. PENDAHULUAN
TBBM (terminal bahan bakar minyak) adalah fasilitas milik PERTAMINA yang digunakan untuk mendistribusikan BBM dari tempat pengolahan BBM ke SPBU (stasiun pengisian bahan bakar umum). Fasilitas pada TBBM antara lain jalur unloading, jalur backloading, tangki timbun, rumah pompa, dan filling shed. Diantara fasilitas – fasilitas tersebut, rumah pompa dan filling shed merupakan fasilitas yang paling vital. Hal ini dikarenakan rumah pompa dan filling shed digunakan untuk mendistribusikan BBM dari tangki timbun ke truk tangki. Pada rumah pompa, terdapat empat pompa yang digunakan untuk proses distribusi premium menuju filling shed dengan delapan filling shed. Masing – masing pompa digunakan untuk mencukupi permintaan dari dua filling shed. Pompa yang digunakan yaitu pompa sentrifugal. Pompa sentrifugal beroperasi dengan meningkatkan tekanan yaitu perputaran motor membuat fluida mengalir melewati impeler yang berputar [1]. Pompa mendapatkan suplai dari tangki timbun untuk mengalirkan bahan bakar menuju filling shed. Akan tetapi dalam proses pendistribusian sering terjadi kavitasi pada pompa atau yang lebih dikenal dengan istilah “masuk angin”.Kavitasi pada pompa sentrifugal terjadi akibat
nilai NPSHA (Net Positive Suction Head Available) lebih kecil dari nilai NPSHR (Net Positive Suction Head Required) [2]
. Hal tersebut terjadi dikarenakan kesalahan pada operator yang terlambat untuk menutup valve pada tangki yang kosong dan membuka valve pada tangki lain yang masih tersedia bahan bakar atau dapat dikatakan sistem yang ada belum terdapat sistem kendali secara otomatis. Akibatnya, proses pengisian bahan bakar pada filling shed menjadi tidak lancar. Selain itu, kavitasi pompa dapat mengakibatkan performa dari pompa menurun, vibrasi, noise atau bising, kerusakan pada material pompa terutama pada impeler pompa, dan vapor lock jika pressure drops penghisap pompa dibawah nilai ambang batas [3]. Berdasarkan kondisi tersebut maka dirancang suatu sistem yang dapat mengendalikan sistem aliran bahan bakar menuju pompa secara otomatis dengan menggunakan switching control agar suplai pada pompa tetap terjaga.
II. URAIANPENELITIAN
Gambar 1 Flowchart Penelitian
PERANCANGAN LEVEL SWITCHING CONTROL TANGKI
TIMBUN PREMIUM TBBM PERTAMINA MANGGIS BALI
Tica Choirun Nisa., Ir. Ya’umar, MT
Jurusan Teknik Fisika, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Teknik Industri, Surabaya 60111
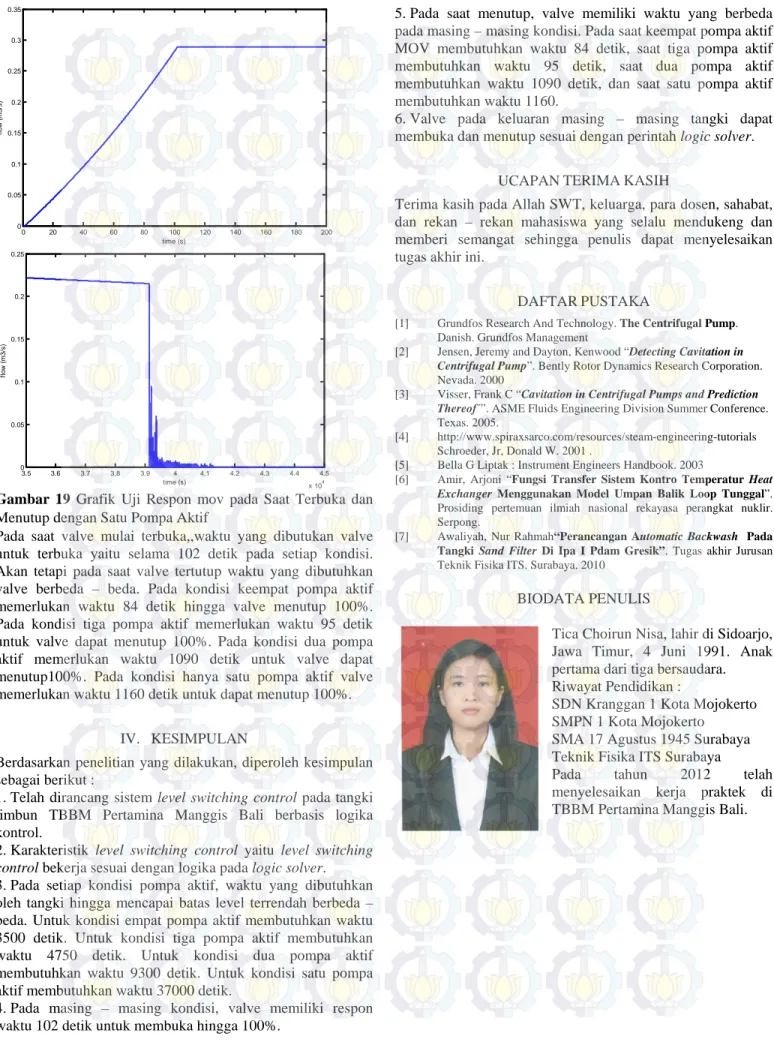
A. Perancangan Level Switching Control
Pada desain level switching control ini akan dirancang sistem kendali otomatis dari buka tutup valve keluaran tangki. Hal ini bertujuan untuk menanggulangi fenomena kavitasi pada pompa. Valve keluaran dari tangki akan membuka dan menutup sesuai dengan perintah yang diberikan oleh logic solver. Logic solver menerima informasi mengenai ketersediaan bahan bakar pada tangki sehingga dapat memberikan perintah kepada valve untuk terbuka atau tertutup.
Gambar 2 Desain Level Switching Control
Terdapat empat tangki timbun premium dengan masing – masing satu valve keluaran tangki. Kondisi yang berlaku yaitu valve pada tangki pertama terbuka terlebih dahulu hingga volume pada tangki pertama mencapai dead stock. Dead stock adalah keadaan dimana volume pada tangki mencapai level minimum yang diperbolehkan. Ketika tangki pertama telah mecapai dead stock, logic solver memerintahkan valve tangki pertama untuk menutup dan valve tangki kedua untuk membuka. Kondisi tersebut berlaku seterusnya untuk valve tangki ketiga dan valve tangki keempat. Ketika sedang terjadi proses truck loading, tangki tidak diperbolehkan dalam keadaan unloading.
B. Model Dinamik Instrumen Penyusun Sistem
Sistem disusun atas beberapa instrumen – instrumen yaitu tangki timbun, MOV, pompa, dan ATG. Masing – masing dari instrumen tersebut memiliki model dinamik yang kemudian digunakan untuk membuat simulasi. Berikut model dinamik dari intrumen – instrumen tersebut :
1.Tangki Timbun
Model dinamik dari tangki timbun didapatkan melalui persamaan :
(1.a)
(1.b) (1.c) (1.d) Karena ketinggian tangki konstan, maka persamaan menjadi:
(1.e) Dengan menggunakan persamaan tersebut dan data yang telah dikumpulkan dari plant, kemudian dilakukan plot pada software matlab 2009a sebagai berikut:
Gambar 3Simulasi Tangki Timbun
2.Motor Operated Valve (MOV)
MOV bertindak sebagai aktuator pada sistem ini. Terdapat empat buah valve dengan tipe gate valve. Model dinamik dari MOV didapatkan dari persamaan berikut [4] :
(2) Dengan menggunakan persamaan tersebut, disusunlah dalam simulasi seperti berikut :
Gambar 4 Simulasi MOV
3.Pompa
Model dinamik pompa didapatkan melalui melalui persamaan berikut [1] :
(3) Berdasarkan persamaan tersebut, kemudian disusun dalam simulasi seperti gambar dibawah ini :
4.Automatic Tank Gauging (ATG)
ATG yang digunakan merupakan ATG dari jenis yang menggunakan motor servo. Motor bergerak berdasarkan level dari fluida dalam tangki. Pergerakan gear motor tersebut menggerakkan inch wheel yang terdapat code tracks. Code tracks tersebut ditangkap oleh detektor yang kemudian diterjemahkan dalam grey code yang berupa kode biner. Kode biner dari grey code kemudian diterjemahkan berupa nilai level fluida pada tangki.
Gambar 6 Layout sistem ATG [5]
Persamaan yang digunakan untuk menyusun simulasi pada software matlab 2009a yaitu menggunakan persamaan umum fungsi transfer sensor [6].
(4)
C. Perancangan Logika Switching Control
Switching control adalah salah satu metode yang digunakan untuk mengontrol suatu proses dalam jumlah yang kecil ataupun dalam jumlah yang besar dengan menggunakan prinsip on-off. Pada Sistem level switching control terdapat kondisi yaitu dimana tidak ada proses pengisian pada tangki timbun dan kondisi ketika terjadi proses pengisian pada tangki timbun.
Gambar 7 Wiring Diagram Logic Solver
Dalam truth table disusun logika switching control yang terdiri atas conditional table dan action table. Condition table berisi deskripsi kondisi yang berlaku pada sistem sedangkan action table berisi perintah pada aktuator sesuai dengan deskripsi yang ada pada conditon table. Berikut tabel kondisi dan tabel aksi pada logic solver :
Gambar 8 Condition Table pada Truth Table
Gambar 9 Action Table pada Truth Table
III. HASIL DAN PEMBAHASAN
Setelah dilakukan langkah – langkah penyusun sistem mulai dari pengabilan data plant, memodelkan instrumen – instrumen penyusun sistem, dan membuat simulasi kemudian didapatkan hasil dari simulasi sebagai berikut :
A. Penurunan Level Tangki Timbun
Berdasarkan pemodelan, didapatkan bahwa terjadi penurunan ketinggian level tangki. Pada plot simulink, penurunan level tangki terjadi secara kontinyu atau terus menerus berdasarkan permintaan pengisian pada filling shed. Jumlah permintaan pengisian pada filling shed menentukan jumlah pompa yang aktif. Jumlah pompa aktif mempengaruhi lama waktu yang dibutuhkan oleh tangki hingga memcapai dead stock atau level terrendah yang ditentukan pada setiap tangki.
Berikut grafik penurunan level tangki dengan kondisi berdasarkan jumlah pompa yang aktif :
0 500 1000 1500 2000 2500 3000 3500 4000 0 2 4 6 8 10 12 time (s) lev el ( m )
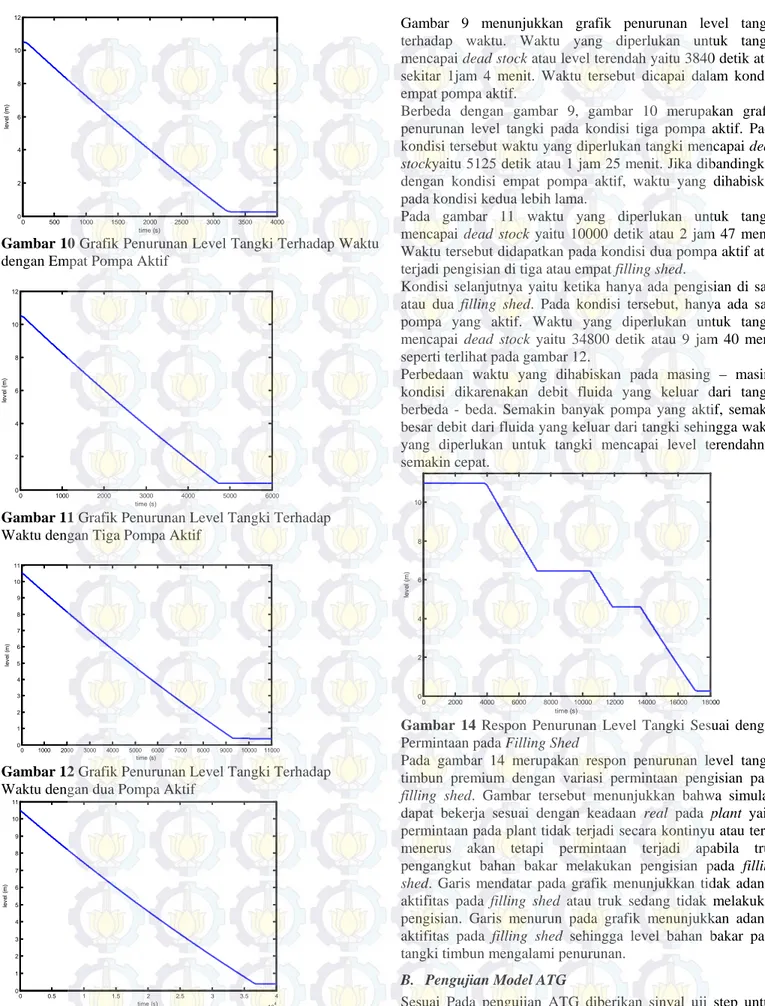
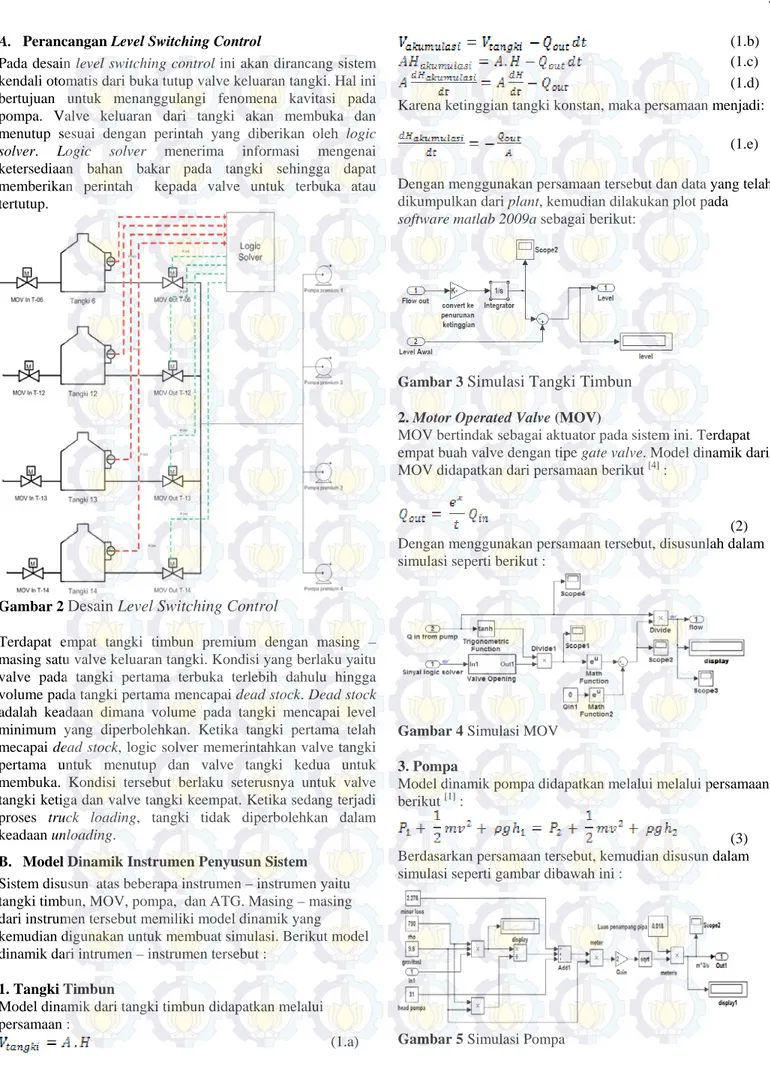
Gambar 10 Grafik Penurunan Level Tangki Terhadap Waktu
dengan Empat Pompa Aktif
0 1000 2000 3000 4000 5000 6000 0 2 4 6 8 10 12 time (s) lev el ( m )
Gambar 11 Grafik Penurunan Level Tangki Terhadap
Waktu dengan Tiga Pompa Aktif
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000 11000 0 1 2 3 4 5 6 7 8 9 10 11 time (s) lev el ( m )
Gambar 12 Grafik Penurunan Level Tangki Terhadap
Waktu dengan dua Pompa Aktif
0 0.5 1 1.5 2 2.5 3 3.5 4 x 104 0 1 2 3 4 5 6 7 8 9 10 11 time (s) lev el ( m )
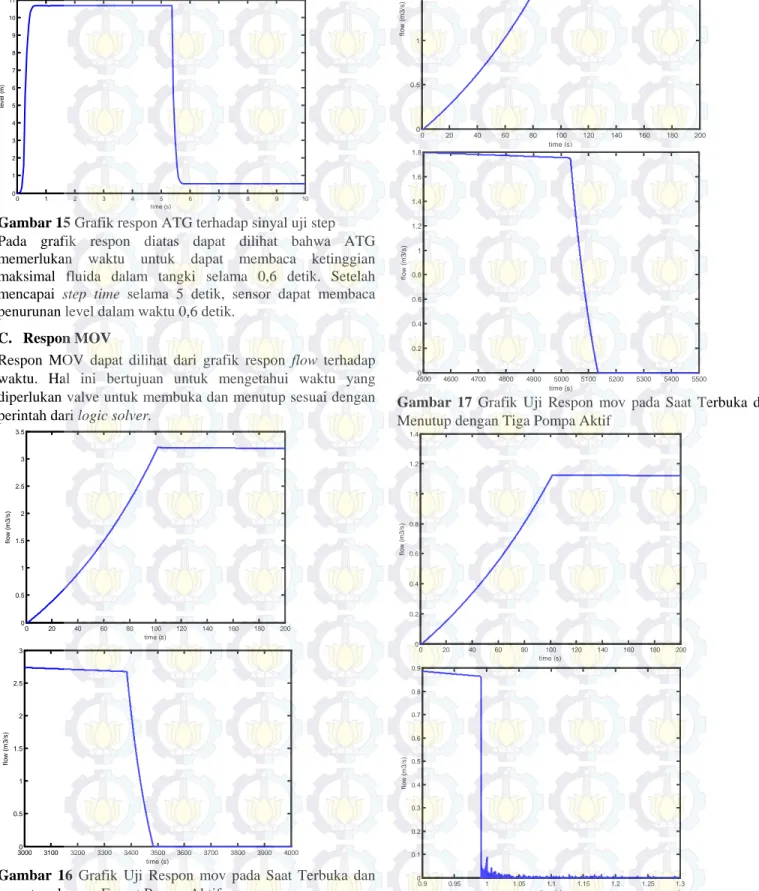
Gambar 13 Grafik Penurunan Level Tangki Terhadap Waktu
dengan satu Pompa Aktif
Gambar 9 menunjukkan grafik penurunan level tangki terhadap waktu. Waktu yang diperlukan untuk tangki mencapai dead stock atau level terendah yaitu 3840 detik atau sekitar 1jam 4 menit. Waktu tersebut dicapai dalam kondisi empat pompa aktif.
Berbeda dengan gambar 9, gambar 10 merupakan grafik penurunan level tangki pada kondisi tiga pompa aktif. Pada kondisi tersebut waktu yang diperlukan tangki mencapai dead stockyaitu 5125 detik atau 1 jam 25 menit. Jika dibandingkan dengan kondisi empat pompa aktif, waktu yang dihabiskan pada kondisi kedua lebih lama.
Pada gambar 11 waktu yang diperlukan untuk tangki mencapai dead stock yaitu 10000 detik atau 2 jam 47 menit. Waktu tersebut didapatkan pada kondisi dua pompa aktif atau terjadi pengisian di tiga atau empat filling shed.
Kondisi selanjutnya yaitu ketika hanya ada pengisian di satu atau dua filling shed. Pada kondisi tersebut, hanya ada satu pompa yang aktif. Waktu yang diperlukan untuk tangki mencapai dead stock yaitu 34800 detik atau 9 jam 40 menit seperti terlihat pada gambar 12.
Perbedaan waktu yang dihabiskan pada masing – masing kondisi dikarenakan debit fluida yang keluar dari tangki berbeda - beda. Semakin banyak pompa yang aktif, semakin besar debit dari fluida yang keluar dari tangki sehingga waktu yang diperlukan untuk tangki mencapai level terendahnya semakin cepat. 0 2000 4000 6000 8000 10000 12000 14000 16000 18000 0 2 4 6 8 10 time (s) lev el ( m )
Gambar 14 Respon Penurunan Level Tangki Sesuai dengan
Permintaan pada Filling Shed
Pada gambar 14 merupakan respon penurunan level tangki timbun premium dengan variasi permintaan pengisian pada filling shed. Gambar tersebut menunjukkan bahwa simulasi dapat bekerja sesuai dengan keadaan real pada plant yaitu permintaan pada plant tidak terjadi secara kontinyu atau terus menerus akan tetapi permintaan terjadi apabila truk pengangkut bahan bakar melakukan pengisian pada filling shed. Garis mendatar pada grafik menunjukkan tidak adanya aktifitas pada filling shed atau truk sedang tidak melakukan pengisian. Garis menurun pada grafik menunjukkan adanya aktifitas pada filling shed sehingga level bahan bakar pada tangki timbun mengalami penurunan.
B. Pengujian Model ATG
Sesuai Pada pengujian ATG diberikan sinyal uji step untuk mengetahui respon dari sensor ketika diberikan sinyal uji step. Nilai yang diberikan yaitu nilai awal sebesar 10 dan nilai akhir
sebesar 0,5 sedangkan step timeyang digunakan adalah 5 detik. Pengujian dilakukan untuk mengetahui apakah sensor mengeluarkan arus listrik sebesar X mA saat level bahan bakar pada titik tertinggi maupun titik terendah [7].
Berikut respon ATG terhadap sinyal uji yang diberikan :
0 1 2 3 4 5 6 7 8 9 10 0 1 2 3 4 5 6 7 8 9 10 11 time (s) lev el ( m )
Gambar 15 Grafik respon ATG terhadap sinyal uji step
Pada grafik respon diatas dapat dilihat bahwa ATG memerlukan waktu untuk dapat membaca ketinggian maksimal fluida dalam tangki selama 0,6 detik. Setelah mencapai step time selama 5 detik, sensor dapat membaca penurunan level dalam waktu 0,6 detik.
C. Respon MOV
Respon MOV dapat dilihat dari grafik respon flow terhadap waktu. Hal ini bertujuan untuk mengetahui waktu yang diperlukan valve untuk membuka dan menutup sesuai dengan perintah dari logic solver.
0 20 40 60 80 100 120 140 160 180 200 0 0.5 1 1.5 2 2.5 3 3.5 time (s) fl ow ( m 3/ s ) 30000 3100 3200 3300 3400 3500 3600 3700 3800 3900 4000 0.5 1 1.5 2 2.5 3 time (s) fl ow ( m 3/ s )
Gambar 16 Grafik Uji Respon mov pada Saat Terbuka dan
menutup dengan Empat Pompa Aktif
0 20 40 60 80 100 120 140 160 180 200 0 0.5 1 1.5 2 2.5 time (s) fl ow ( m 3/ s ) 45000 4600 4700 4800 4900 5000 5100 5200 5300 5400 5500 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 time (s) fl ow ( m 3/ s )
Gambar 17 Grafik Uji Respon mov pada Saat Terbuka dan
Menutup dengan Tiga Pompa Aktif
0 20 40 60 80 100 120 140 160 180 200 0 0.2 0.4 0.6 0.8 1 1.2 1.4 time (s) fl ow ( m 3/ s ) 0.9 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 x 104 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 time (s) fl ow ( m 3/ s )
Gambar 18 Grafik Uji Respon mov pada Saat Terbuka dan
0 20 40 60 80 100 120 140 160 180 200 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 time (s) fl ow ( m 3/ s ) 3.5 3.6 3.7 3.8 3.9 4 4.1 4.2 4.3 4.4 4.5 x 104 0 0.05 0.1 0.15 0.2 0.25 time (s) fl ow ( m 3/ s )
Gambar 19 Grafik Uji Respon mov pada Saat Terbuka dan
Menutup dengan Satu Pompa Aktif
Pada saat valve mulai terbuka,,waktu yang dibutukan valve untuk terbuka yaitu selama 102 detik pada setiap kondisi. Akan tetapi pada saat valve tertutup waktu yang dibutuhkan valve berbeda – beda. Pada kondisi keempat pompa aktif memerlukan waktu 84 detik hingga valve menutup 100%. Pada kondisi tiga pompa aktif memerlukan waktu 95 detik untuk valve dapat menutup 100%. Pada kondisi dua pompa aktif memerlukan waktu 1090 detik untuk valve dapat menutup100%. Pada kondisi hanya satu pompa aktif valve memerlukan waktu 1160 detik untuk dapat menutup 100%.
IV. KESIMPULAN
Berdasarkan penelitian yang dilakukan, diperoleh kesimpulan sebagai berikut :
1.Telah dirancang sistem level switching control pada tangki timbun TBBM Pertamina Manggis Bali berbasis logika kontrol.
2.Karakteristik level switching control yaitu level switching control bekerja sesuai dengan logika pada logic solver. 3.Pada setiap kondisi pompa aktif, waktu yang dibutuhkan oleh tangki hingga mencapai batas level terrendah berbeda – beda. Untuk kondisi empat pompa aktif membutuhkan waktu 3500 detik. Untuk kondisi tiga pompa aktif membutuhkan waktu 4750 detik. Untuk kondisi dua pompa aktif membutuhkan waktu 9300 detik. Untuk kondisi satu pompa aktif membutuhkan waktu 37000 detik.
4.Pada masing – masing kondisi, valve memiliki respon waktu 102 detik untuk membuka hingga 100%.
5.Pada saat menutup, valve memiliki waktu yang berbeda pada masing – masing kondisi. Pada saat keempat pompa aktif MOV membutuhkan waktu 84 detik, saat tiga pompa aktif membutuhkan waktu 95 detik, saat dua pompa aktif membutuhkan waktu 1090 detik, dan saat satu pompa aktif membutuhkan waktu 1160.
6.Valve pada keluaran masing – masing tangki dapat membuka dan menutup sesuai dengan perintah logic solver.
UCAPANTERIMAKASIH
Terima kasih pada Allah SWT, keluarga, para dosen, sahabat, dan rekan – rekan mahasiswa yang selalu mendukeng dan memberi semangat sehingga penulis dapat menyelesaikan tugas akhir ini.
DAFTARPUSTAKA
[1]
Grundfos Research And Technology. The Centrifugal Pump. Danish. Grundfos Management
[2] Jensen, Jeremy and Dayton, Kenwood “Detecting Cavitation in Centrifugal Pump”. Bently Rotor Dynamics Research Corporation. Nevada. 2000
[3] Visser, Frank C “Cavitation in Centrifugal Pumps and Prediction Thereof´”. ASME Fluids Engineering Division Summer Conference. Texas. 2005.
[4] http://www.spiraxsarco.com/resources/steam-engineering-tutorials Schroeder, Jr, Donald W. 2001 .
[5] Bella G Liptak : Instrument Engineers Handbook. 2003
[6] Amir, Arjoni “Fungsi Transfer Sistem Kontro Temperatur Heat Exchanger Menggunakan Model Umpan Balik Loop Tunggal”. Prosiding pertemuan ilmiah nasional rekayasa perangkat nuklir. Serpong.
[7] Awaliyah, Nur Rahmah“Perancangan Automatic Backwash Pada Tangki Sand Filter Di Ipa I Pdam Gresik”. Tugas akhir Jurusan Teknik Fisika ITS. Surabaya. 2010
BIODATA PENULIS
Tica Choirun Nisa, lahir di Sidoarjo, Jawa Timur, 4 Juni 1991. Anak pertama dari tiga bersaudara. Riwayat Pendidikan :
SDN Kranggan 1 Kota Mojokerto SMPN 1 Kota Mojokerto
SMA 17 Agustus 1945 Surabaya Teknik Fisika ITS Surabaya
Pada tahun 2012 telah menyelesaikan kerja praktek di TBBM Pertamina Manggis Bali.

![Gambar 6 Layout sistem ATG [5]](https://thumb-ap.123doks.com/thumbv2/123dok/2116218.2154900/3.918.73.850.78.993/gambar-layout-sistem-atg.webp)