See discussions, stats, and author profiles for this publication at: http://www.researchgate.net/publication/267755294
Pengaruh Karakteristik dan Pencahayaan Objek
terhadap Pelacakan Tanpa Penanda dalam
Ruang Tertutup pada Aplikasi Mobile
Augmented Reality
CONFERENCE PAPER · OCTOBER 2014
DOI: 10.13140/2.1.2301.7923
DOWNLOADS
119
VIEWS
118
3 AUTHORS, INCLUDING:
Aditya Rizki Yudiantika
Gadjah Mada University
8PUBLICATIONS 0CITATIONS
SEE PROFILE
Selo Sulistyo
Gadjah Mada University
14PUBLICATIONS 6CITATIONS
SEE PROFILE
Pengaruh Karakteristik dan Pencahayaan Objek terhadap
Pelacakan Tanpa Penanda dalam Ruang Tertutup pada Aplikasi
Mobile Augmented Reality
Aditya Rizki Yudiantika
1), Selo Sulistyo
2), Bimo Sunarfri Hantono
3)1), 2), 3)
eSystems Lab, Jurusan Teknik Elektro dan Teknologi Informasi, Universitas Gadjah Mada, Yogyakarta Jl. Grafika 2, Kampus UGM, Yogyakarta 55281
Email : [email protected] 1), [email protected] 2), [email protected] 3)
Abstract— The success of markerless object tracking on mobile augmented reality (AR) is determined by two factors, object characteristics and lighting conditions around the object. Object characteristics include the shape and color patterns of the real object to be recognized. While the lighting conditions associated with color of light, light intensity, and the type of light source used to illuminate the object. This study examines the effect of these two factors in mobile AR applications for indoor using SLAM (Simultaneous Localization and Mapping) tracking method. Testing carried out using an AR application to keep track of two types of objects that have different characteristics. The results showed that the color of light does not affect markerless tracking in AR application. However, the factor that affect markerless tracking is the intensity of light that illuminates the real object. In addition, tracking success is also determined by the shape of the object, the object color patterns, and the distance from the camera to the object. Object that its edges are difficult to detect and has a uniform color patterns it would be difficult to track. Indoor displayed objects, like in museum, tend to have the unique shape and nonuniform color patterns so that the implementation of markerless tracking through mobile AR prototype successfully performed.
Keywords: markerless tracking, mobile augmented reality, indoor, museum, SLAM
Intisari— Keberhasilan proses pelacakan tanpa penanda pada aplikasi mobile AR (Augmented Reality) sangat ditentukan oleh dua faktor, yaitu karakteristik dan kondisi pencahayaan di sekitar objek. Karakteristik objek meliputi bentuk dan corak objek nyata yang akan dikenali. Sedangkan kondisi pencahayaan berhubungan dengan warna cahaya, intensitas cahaya, dan jenis sumber cahaya yang digunakan untuk menerangi objek. Penelitian ini mengkaji pengaruh kedua faktor tersebut pada aplikasi mobile AR untuk ruang tertutup (indoor). Pengujian dilakukan menggunakan prototipe aplikasi AR untuk melacak dua jenis objek yang mempunyai karakteristik berbeda. Metode pelacakan yang digunakan oleh prototipe tersebut yaitu SLAM (Simultaneous Localization and Mapping). Dari hasil pengujian diperoleh bahwa warna cahaya tidak mempengaruhi pelacakan tanpa penanda pada aplikasi AR. Namun, faktor yang mempengaruhi pelacakan tanpa penanda adalah intensitas cahaya yang menerangi objek nyata. Selain itu, keberhasilan pelacakan juga ditentukan oleh bentuk objek, corak objek, serta jarak kamera dengan objek. Bentuk objek yang sulit dideteksi
batas tepinya dan memiliki corak yang seragam akan sulit dilacak. Objek-objek yang dipamerkan dalam ruang tertutup, seperti museum, cenderung memiliki bentuk dan corak yang tidak seragam sehingga implementasi pelacakan tanpa penanda melalui prototipe AR berhasil dilakukan.
Kata kunci: pelacakan tanpa penanda, mobile augmented reality, indoor, museum, SLAM
I. PENDAHULUAN
Museum didirikan untuk memamerkan koleksi benda-benda peninggalan masa lalu. Museum juga merupakan lokasi yang tepat bagi pengunjung untuk mengapresiasi koleksi benda peninggalan tersebut. Kondisi museum yang kurang dinamis dalam hal penataan ruang pamer dan ketersediaan informasi menyebabkan minat pengunjung berkurang. Berbagai pendekatan diperlukan untuk menarik minat dan pengalaman pengunjung. Pendekatan tersebut dapat dilakukan dengan mengembangkan aplikasi Augmented Reality (AR). Melalui AR, cara-cara baru untuk menceritakan objek museum dapat dikembangkan dalam bentuk aplikasi mobile.
Pencahayaan objek dan kondisi lingkungan museum (ruang tertutup) akan mempengaruhi proses pelacakan dalam sistem AR. Pencahayaan akan menentukan bagaimana objek nyata ditangkap oleh berbagai jenis kamera dengan beragam sensitivitas terhadap cahaya. Dalam praktiknya, penggunaan pelacakan objek tanpa penanda (markerless tracking) pada ruangan museum lebih disukai jika dibandingkan dengan pelacakan berbasis penanda (marker-based). Selain lebih alami, metode pelacakan tanpa penanda tidak membutuhkan penanda tambahan yang harus dipasang di sekitar lingkungan objek museum karena akan mengganggu nilai estetika.
potensi komunikasi, yaitu dengan menyediakan konteks ruang dan waktu bagi pengunjung.
Beberapa museum di Indonesia belum memperhatikan seberapa penting instalasi pencahayaan. Kualitas dan metode pencahayaan yang diterapkan hanya sekadar untuk tujuan penerangan benda koleksi museum. Hal ini menyebabkan benda koleksi yang dipamerkan sulit diapresiasi pengunjung sebagai benda yang penting dan memiliki nilai.
Kondisi pencahayaan yang cukup dan tertata dengan baik dalam museum juga bermanfaat untuk mengembangkan aplikasi berbasis AR. Selain dalam hal pencahayaan, benda-benda koleksi museum yang dipamerkan juga memiliki sifat dan karakteristik material yang berbeda-beda. Penelitian ini akan mengkaji lebih jauh pengaruh pencahayaan objek, bentuk dan corak objek, serta kondisi lingkungan ruang tertutup terhadap penerapan sistem AR tanpa penanda untuk perangkat bergerak.
II. KAJIAN PUSTAKA
Penelitian-penelitian awal sistem AR menyatakan bahwa sebuah sistem AR dapat bekerja dengan baik pada lingkungan yang sudah siap (prepared environment) [3]. Maksud dari lingkungan yang sudah siap adalah lingkungan nyata yang terletak di dalam ruangan (indoor)
sehingga pencahayaan dan penataan ruang mudah untuk dimodifikasi. Dalam hal ini, museum termasuk dalam kriteria lingkungan yang sudah siap.
Berbagai benda koleksi museum disimpan dan dipamerkan dalam ruangan khusus, sehingga dapat dengan mudah diatur posisi, letak, dan tata cahayanya sedemikian rupa oleh pengelola museum. Ruangan museum yang baik memiliki intensitas cahaya antara 50-200 lux untuk menerangi objek-objek yang dipamerkan [4]. Kondisi tersebut diperoleh berdasarkan tingkat kenyamanan mata manusia ketika mengamati benda-benda di dalam ruangan museum, juga berdasarkan sifat dan karakteristik pembentuk benda-benda tersebut.
Terminologi sistem AR yang selalu menggabungkan lingkungan nyata dan lingkungan virtual mengakibatkan keduanya membutuhkan kepekaan terhadap fokus dan kontras objek [5]. Idealnya, kondisi lingkungan virtual harus sesuai dengan kondisi lingkungan nyata. Lingkungan nyata diproyeksikan melalui kamera pada jarak tertentu untuk mendapatkan fokus yang tepat. Meskipun pelacakan objek dilakukan pada ruangan tertutup, kontras lingkungan menjadi isu lain. Kontras lingkungan dipengaruhi oleh rentang pencahayaan dinamis yang lebar dalam lingkungan nyata dan perangkat yang digunakan manusia untuk mendeteksi lingkungan tersebut. Kecerahan (brightness)
objek nyata dan virtual harus saling sesuai.
Sebuah sistem yang akurat untuk pemetaan dan pelacakan objek berbasis SLAM (Simultaneous Localization and Mapping) dalam ruangan secara real time
pernah dikembangkan. Sistem tersebut menggunakan kamera dan sensor pada perangkat Kinect [6]. Dengan memanfaatkan data kedalaman, sistem tersebut dapat berjalan dengan baik pada kondisi cahaya yang cukup. Sistem SLAM dikenal sebagai metode pelacakan visual yang akurat dan cepat melalui kamera perangkat bergerak untuk mendeteksi lingkungan yang tidak dikenali
sebelumnya. Perkembangan yang pesat dilakukan oleh Klein dan Murray [7] yang memperagakan kemampuan SLAM untuk membuat model 3D dari ribuan titik.
Dari studi di atas, bentuk objek dan kondisi lingkungan merupakan dua faktor yang akan mempengaruhi keberhasilan pelacakan tanpa penanda dalam sistem AR. Untuk itu, penelitian ini akan menguji sebuah prototipe aplikasi mobile AR yang dikembangkan dengan metode pelacakan SLAM terhadap karakteristik objek nyata dan kondisi pencahayaan dalam ruang tertutup.
III. METODE
Penelitian ini menggunakan sebuah prototipe aplikasi yang dikembangkan menggunakan Metaio Suite, yang terdiri dari Metaio Creator dan Metaio SDK. Prototipe digunakan untuk menguji beberapa parameter yang menentukan keberhasilan pelacakan objek nyata terhadap karakteristik objek dan kondisi pencahayaan objek. Prototipe tersebut merupakan aplikasi AR sederhana yang menggunakan metode pelacakan objek tanpa penanda.
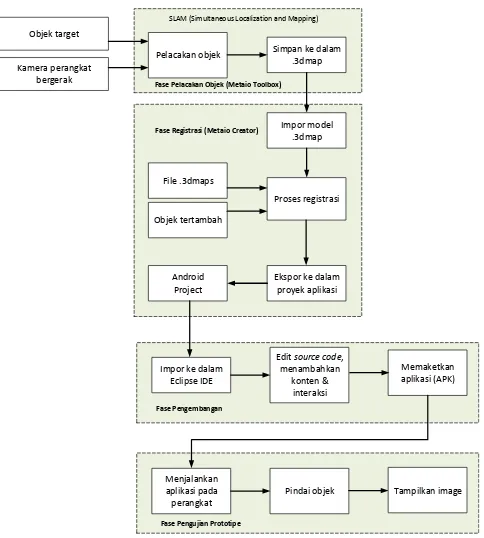
Langkah-langkah pembuatan dan pengujian prototipe ditunjukkan seperti pada Gambar 1. Secara umum, pembuatan prototipe melalui serangkaian langkah, yaitu registrasi dan pelacakan. Objek nyata dipetakan menggunakan Metaio Toolbox untuk mendapatkan model dalam bentuk file .3dmap. Metaio menggunakan teknik pemetaan objek berbasis SLAM [8].
Pelacakan merupakan sebuah metode yang diperlukan untuk mengaktifkan pengukuran yang akurat mengenai bagaimana dan dari mana konten virtual harus diberikan. Teknologi AR melibatkan pelacakan dari sudut pandang pengguna. Akurasi pelacakan dalam beberapa aplikasi AR menjadi hal yang sangat penting karena akan menentukan posisi objek yang ditambahkan ke objek nyata secara tepat [9].
Registrasi merupakan proses dalam pembuatan sistem AR yang berhubungan dengan bagaimana sebuah objek virtual dapat ditambahkan menurut posisi, koordinat, dan kedalaman tertentu atas objek nyata [5]. Dalam hal ini, proses registrasi dilakukan menggunakan Metaio Creator. File .3dmap hasil pemetaan Metaio Toolbox diimpor ke dalam Metaio Creator agar objek virtual yang telah disiapkan dapat ditempelkan ke model.
Objek nyata yang digunakan dalam pengujian adalah sebuah kendi berbahan dasar tanah liat dan papercraft
berbentuk balok. Sedangkan objek virtual yang digunakan dalam pengujian yaitu berupa citra yang menampilkan informasi singkat objek.
Pengujian prototipe dilakukan menggunakan perangkat Lenovo K860 dengan sistem operasi Android versi 4.2. Perangkat tersebut dilengkapi dengan prosesor Quad-core 1.4 GHz Cortex-A9 dan kamera autofokus 8 MP. Jenis lampu yang digunakan adalah lampu bohlam Phillips 15 Watt berwarna terang (clear), kuning (yellow), biru (blue), merah (red), hijau (green), dan orange. Sebagai bahan perbandingan, sebuah lampu fokus Phillips 25 Watt juga digunakan dalam penelitian ini. Saat pengujian, lampu-lampu tersebut diletakkan sejauh 30 cm di depan objek nyata.
IV. PEMBAHASAN
A. Pelacakan dan Registrasi Objek
Aplikasi Metaio Toolbox digunakan untuk mengenali fitur-fitur dari bagian sebuah objek yang belum dikenali, kemudian merekamnya ke dalam file .3dmap. Semakin banyak jumlah fitur yang dikenali, maka proses komputasi perangkat menjadi semakin besar. Hal ini mengakibatkan unjuk kerja ponsel cerdas yang digunakan untuk melakukan pelacakan semakin tinggi, terutama ketika jumlah fitur mencapai pada kisaran 2000 titik.
Proses pelacakan objek sebaiknya dilakukan on the spot
dan pada kondisi pencahayaan yang stabil. Hal tersebut dilakukan agar file model yang diperoleh mirip dengan kondisi lingkungan nyata. Pada proses ini telah dilakukan percobaan dengan melakukan pelacakan sebuah objek secara terpisah, kemudian diuji pada lingkungan yang lain. Meskipun objek dapat dikenali, hasil pengenalan objek pada proses pelacakan on the spot lebih kuat (robust)
dibandingkan hasil pengenalan objek yang menggunakan pelacakan objek tidak pada tempatnya.
Uji coba pelacakan dilakukan terhadap dua objek yang mempunyai karakteristik berbeda, yaitu pada sebuah balok
papercraft (dimensi tinggi 15 cm dan lebar 6 cm) berwarna
merah seragam dan sebuah kendi (dimensi tinggi 27 cm dan lebar 22 cm) yang mempunyai bentuk unik dan corak warna yang khas. Intensitas cahaya di sekitar objek pada saat uji coba kedua objek sama, yaitu sekitar 115 lux pada kondisi cahaya ruangan normal.
Ketika pelacakan dilakukan terhadap objek berbentuk balok, seperti yang ditunjukkan oleh Gambar 2, aplikasi Metaio Toolbox selalu gagal melacak objek tersebut. Hal ini disebabkan oleh kelemahan pelacakan SLAM yang sulit mendeteksi objek berwarna seragam. Selain itu, teknik pelacakan SLAM juga memanfaatkan deteksi sisi objek
(edge detection) yang jelas.
Gambar 2. Pelacakan pada objek bercorak seragam
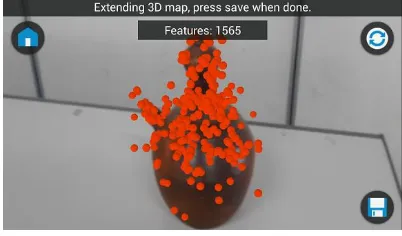
Berbeda halnya ketika pelacakan dilakukan terhadap objek kendi (Gambar 3). Meskipun mempunyai warna yang cukup seragam, objek tersebut mempunyai corak yang khas. Akibatnya sisi-sisi pembentuk kendi dapat dikenali dengan mudah oleh Metaio Toolbox. Semakin dekat posisi objek dengan kamera maka ukuran fitur-fitur tersebut akan semakin membesar. Selain berfungsi sebagai penanda objek, fitur juga merepresentasikan kedalaman objek terhadap kamera.
Gambar 3. Pelacakan pada objek bercorak unik
Pada proses registrasi, file .3dmap yang diperoleh ketika proses pelacakan diimpor ke dalam Metaio Creator. File tersebut adalah model objek nyata yang berupa titik-titik fitur.
Hasil pengukuran berdasarkan jumlah fitur saat proses pelacakan objek ditunjukkan oleh TABEL 1.
TABEL 1. PENGUKURAN BERDASAR JUMLAH FITUR
No Jumlah
Fitur
Rating Ukuran .3dmap Hasil Pelacakan
Gambar 4. Pengujian pelacakan objek yang disinari beberapa warna lampu
Semakin banyak fitur yang diperoleh, maka semakin rapat fitur yang digunakan untuk melakukan pelacakan objek sehingga memungkinkan pelacakan objek yang semakin sempurna dari berbagai sisi atau sudut pandang. Konsekuensinya ukuran prototipe aplikasi juga semakin membesar seiring dengan bertambahnya ukuran file .3dmap. Meskipun kelima hasil pengujian pelacakan terhadap variasi jumlah fitur berhasil mengenali objek, hasil pelacakan yang terbaik adalah ketika jumlah fitur mencapai 3042 fitur, yang ditunjukkan melalui kecepatan pelacakan objek dan rentang sudut pandang pelacakan yang dilakukan oleh prototipe aplikasi.
B. Pengujian
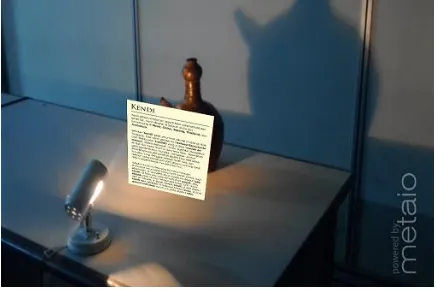
Apabila objek kendi berhasil dilacak, maka objek virtual yang ditampilkan berupa citra yang berisi informasi mengenai objek tersebut. Posisi dan orientasi objek virtual yang dihasilkan diatur ketika melakukan tahap registrasi objek.
Pada percobaan berikut dilakukan pengujian terhadap enam warna lampu bohlam yang masing-masing mempunyai daya 15 Watt. Kondisi pelacakan, registrasi dan objek yang digunakan sama. Objek kendi dilacak melalui 3000 titik di depan cahaya lampu terang dengan intensitas cahaya 146 lux (Gambar 5).
Gambar 5. Proses pelacakan objek kendi yang disinari di depan cahaya bohlam
Untuk melakukan pengujian ini, sebuah bohlam yang dimasukkan dalam fitting diletakkan di depan objek kendi sebagai sumber cahaya objek. Luxmeter digunakan untuk
mengukur intensitas cahaya yang dipancarkan oleh lampu seperti ditunjukkan oleh Gambar 6.
Gambar 6. Cara mengukur dengan luxmeter
Pengujian pelacakan objek yang disinari beberapa warna lampu ditunjukkan pada Gambar 4. Hasil pengujian pelacakan objek dengan warna sumber cahaya yang berbeda-beda ditunjukkan pada TABEL 2.
TABEL 2. HASIL PELACAKAN OBJEK TERHADAP WARNA LAMPU
No Warna
Lampu
Intensitas Cahaya
(lux)
Hasil Pelacakan
50 cm
100 cm
150 cm
200 cm
1 Terang 75 V V V X
2 Kuning 75 V V V X
3 Merah 36 V V V X
4 Biru 17 V X X X
5 Hijau 31 V V V X
6 Orange 48 V V V X
Keterangan:
Dari TABEL 2 di atas dapat diketahui beberapa hal. Intensitas cahaya yang dihasilkan oleh beberapa warna lampu dengan daya yang sama besar ternyata menghasilkan intensitas cahaya yang berbeda. Semakin kecil nilai intensitas cahaya yang diterima luxmeter berarti cahaya yang dipancarkan oleh lampu semakin redup. Lampu berwarna terang dan kuning mempunyai intensitas cahaya yang paling kuat, yaitu sekitar 75 lux. Lampu berwarna biru mempunyai intensitas cahaya yang paling lemah, yaitu sekitar 17 lux.
Semakin kecil nilai intensitas cahaya, maka objek akan semakin sulit dilacak. Pada pengujian di atas, sumber cahaya bohlam yang memancarkan warna biru mempunyai hasil pelacakan yang paling buruk. Pada kondisi ini, objek hanya bisa dikenali pada jarak kurang lebih 50 cm (sangat dekat). Untuk warna bohlam yang lain, pelacakan objek dapat dilakukan hingga jarak 1,5 m. Konsekuensinya, ukuran objek virtual yang muncul semakin kecil (Gambar 7).
Gambar 7. Pengujian pelacakan objek pada jarak 1,5 meter
Pengujian juga dilakukan dengan melacak objek pada sudut pandang tertentu. Selama objek nyata berada dalam lingkungan dengan intensitas cahaya yang cukup, maka pelacakan objek akan berhasil dan objek virtual akan muncul (Gambar 8).
Gambar 8. Pengujian pelacakan objek menurut sudut pandang sebelah kiri depan objek
Selain dikenal lampu berjenis bohlam, juga dikenal lampu fokus. Ciri lampu fokus yaitu memiliki metode pancar yang lebih halus dan terfokus, jika dibandingkan lampu bohlam biasa. Percobaan yang ditunjukkan Gambar 9 menggunakan lampu fokus 25 Watt untuk menerangi objek. Hasil yang diperoleh adalah lampu tersebut memiliki intensitas cahaya sebesar 333 lux dan pelacakan berhasil.
Gambar 9. Pengujian pelacakan objek dengan sumber cahaya lampu fokus
V. KESIMPULAN
Sesuai dengan hasil pembahasan di atas diperoleh bahwa warna cahaya tidak mempengaruhi pelacakan tanpa penanda pada aplikasi AR. Namun, faktor yang mempengaruhi pelacakan tanpa penanda adalah intensitas cahaya yang menerangi di sekitar objek nyata. Oleh karena itu, kondisi pencahayaan pada ruang tertutup harus stabil. Kestabilan pencahayaan diperlukan untuk memperoleh kondisi pencahayaan yang sama dan sempurna ketika melakukan pelacakan objek dengan SLAM dan pengujian prototipe aplikasi AR.
Metode pelacakan SLAM pada aplikasi mobile AR telah dapat melakukan pelacakan objek pada kondisi cahaya yang redup, yaitu hingga pada intensitas 17 lux. Keberhasilan pelacakan juga ditentukan oleh bentuk, corak objek, serta jarak kamera dengan objek. Objek yang memiliki bentuk yang sulit dideteksi batas tepinya dan memiliki corak yang seragam akan sulit dilacak. Semakin jauh jarak objek dengan kamera, maka objek juga akan semakin sulit untuk dilacak. Sudut pandang kamera dapat dilakukan dari berbagai sisi kiri dan kanan objek, selama fitur pada sisi-sisi tersebut direkam saat proses pelacakan. Objek-objek yang dipamerkan dalam ruang tertutup, seperti museum, cenderung memiliki bentuk yang unik dan corak yang tidak seragam sehingga implementasi pelacakan tanpa penanda melalui prototipe AR berhasil dilakukan.
Tantangan selanjutnya adalah membangun metode pelacakan adaptif yang dapat mengakomodasi berbagai kondisi pencahayaan dinamis. Hal tersebut dilakukan untuk mengakomodasi kegiatan pameran objek yang tidak hanya dilakukan pada ruang tertutup, misalnya pada ruang semi tertutup. Selain itu, pengembangan metode pelacakan yang dapat mendeteksi objek tanpa penanda yang memiliki bentuk yang sederhana dan corak yang seragam juga diperlukan.
VI. DAFTAR PUSTAKA
[1] R. Ajmat, J. Sandoval, F. A. Sema, B. O’Donell, S. Gor and H. Alonso, "Lighting design in museums: exhibition vs preservation,"
WIT Transactions on The Built Environment, vol. 118, 2011.
[2] "Kevan Shaw Lighting Design, Lecture, Forum for exhibitors in
Norrkoping," [Online]. Available:
www.kevan-shaw.com/ksld_upload/pdf/museum_lecture. [Accessed 1 7 2014].
[4] "What effect does exposure to light have on a museum’s collections?," Philadelphia Museum of Art, [Online]. Available: http://www.philamuseum.org/conservation/10.html?page=2. [Accessed 13 July 2014].
[5] R. T. Azuma, "A survey of augmented reality.," Presence, vol. 6, no. 4, pp. 355-385, 1997.
[6] R. A. Newcombe and e. al., "KinectFusion: Real-time dense surface mapping and tracking.," Mixed and augmented reality (ISMAR),
2011 10th IEEE international symposium, pp. 127-136, 2011.
[7] A. R. Yudiantika, S. Sulistyo and B. S. Hantono, "Evaluasi Metode Pelacakan Tanpa Marker pada Metaio SDK untuk Pengembangan
Aplikasi Kuis Berbasis Augmented Reality di Museum," in Seminar
Nasional Teknologi Informasi dan Multimedia STMIK Amikom,
Yogyakarta, 2014.
[8] J. Looser, R. e. Grasset and M. Billinghurst, "A 3D Flexible and Tangible Magic Lens in Augmented Reality," 2007.
[9] G. Klein and D. Murray, "Parallel tracking and mapping for small
AR workspaces," in Mixed and Augmented Reality, 2007. ISMAR