PENGENDALIAN PROSES – 2
IR. M. YUSUF RITONGA PROGRAM STUDI TEKNIK KIMIA
FAKULTAS TEKNIK UNIVERSITAS SUMATERA UTARA
PENDAHULUAN
Bagaikan mengemudikan suatu kenderaan, orang perlu tahu bagaimana sifat-sifat proses yang dikendalikannya. Ada proses yang cepat bereaksi terhadap perubahan out put, ada yang bereaksi lambat terhadap perubahan input. Semua sifat proses itu dinyatakan dalam istilah yang disebut dinamika proses.
Dari buku ini, mulai tampak kendala untuk menerangkan serta mempelajari ilmu sistem pengendalian proses dan atau tanpa melalui persamaan-persamaan matematik. Dalam prakteknya, dinamika proses harus selalu dinyatakan dalam bentuk persamaan matematik yang lazim disebut transfer function. Bentuk persamaan matematik ini ternyata tidak sederhana. Mereka pada umumnya berbentuk persamaan differensial.
Masalahnya kalau penjelasan matematik dinamika proses itu ditiadakan demi menyederhanakan materi, banyak di antara pembaca yang akan kehilangan hakekat falsafah ilmu. Terutama mereka yang serius dan pernah mempelajari ilmu sistem pengendalian. Pokok bahasan akan menjadi terasa dangkal. Namun sebaliknya bagi mereka yang tidak paham dan tidak suka bentuk matematika, kemungkinan besar penampilan persamaan matematik membuatnya menjadi segan mempelajari isi buku ini.
1. HASIL KERJA SISTEM PENGENDALIAN OTOMATIS ( TRANSIENT RESPONSE OF CLOSED LOOP SYSTEM )
Menyambung apa yang sudah dibahas pada sebagian sub pokok bahasan 1.8, mengapa kurva waktu pada gambar 1.10 itu terjadi? Mengapa keseimbangan yang baru tercapai di titik 59%, padahal set point sama dengan 60%.
Idealnya process variable harus mengikuti set point pada keadaan apapun. Ternyata keadaan ideal ini tidak pernah tercapai. Banyak sekali faktor-faktor serta keterbatasan keterbatasan yang menyebabkan tidak pernah tercapainya keadaan ideal ini. Salah satu keterbatasan yang paling nyata adalah keterbatasan kerja control valve.
Andaikata controller menghendaki control valve mengoreksi proses variabel dengan menambah bukaan sebanyak 50%. Kalau pada saat awal control valve sudah berada di bukaan 70%, seharusnya tambahan sinyal 50% akan membawa bukaan control valve menjadi 120%. Mungkinkah itu terjadi? Control valve, karena sifat mekanismenya, tidak mungkin terbuka lebih dari 100%. Maksimum ia akan terbuka 100%. Itulah sebabnya hasil langkah “menghitung”controller tidak pernah dapat dilaksanakan dengan sempurna. Semua alasan yang ada di dalam sistem mempunyai keterbatasan seperti ini.
Di dalam pokok bahasan 8 sudah disinggung sedikit bahwa keempat mata rantai pengendalian, yaitu mengukur, membandingkan, menghitung, dan mengoreksi, dilakukan serempak oleh sistem pengendalian. Jadi, pada waktu sistem pengukuran mengukur process
variable, pada saat itu pula control valve berusaha mengoreksi process variabel. Padahal, semua elemen di dalam sistem mempunyai unsur kelambatan (lag). Karena unsur kelambatan itu, bisa saja control valve masih menambah manipulated variable pada waktu process variable sudah mendekati set point. Akibatnya, measurement variable melewati set point.
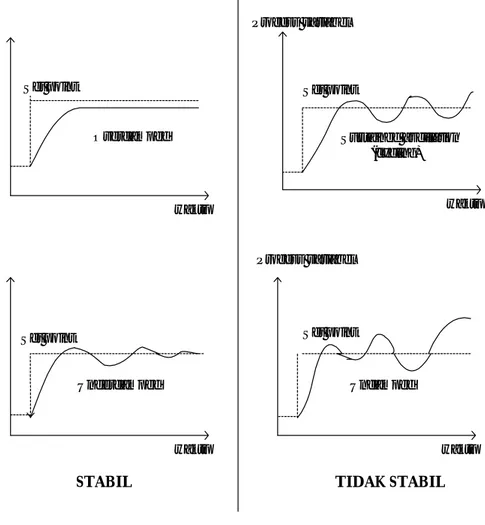
Kelak akan dipelajari bahwa bentuk kurva waktu itu sangat dipengaruhi oleh transfer function masing-masing elemen. Semua bentuk kurva waktu itu disebut response atau transient response sistem pengendalian. Namun secara umum mereka dapat dikelompokkan menjadi dua, yaitu stabil (stable) dan tidak stabil (unstable). Kemudian kelompok stabil terbagi menjadi dua lagi yaitu overdamped dan underdumped. Kelompok tidak stabil juga terbagi dua, yaitu sustain oscillation dan undamped. Lihatlah bentuk keempat kurva waktu ini pada gambar 1.
Process variabel Set point Underdamped waktu waktu Set point Sustained ascillation (cycling) waktu Set point Overdamped Process variabel Set point waktu Undamped
STABIL TIDAK STABIL
Gambar 1. Response sistem pengendalian otomatis
Suatu sistem pengendalian dikatakan stabil, apabila nilai process variable berhasil mendekati set point, Walaupun diperlukan waktu untuk itu. Keadaan stabil itu dapat dicapai
dengan response yang overdamped atau yang underdamped. Kedua response itu mempunyai kelebihan dan kekurangan masing-masing. Pada response yang underdamped, jelas bahwa koreksi sistem berjalan lebih cepat dari response yang overdamped. Tetapi tidak berarti bahwa underdamped lebih bagus dari overdamped. Ada proses yang membutuhkan response yang lambat (overdamped) dan ada pula proses-proses yang membutuhkan response yang cepat (underdamped).
Kebutuhan tersebut ditentukan oleh sifat proses dan kualitas produk yang dikehendaki. Operator yang berpengalaman tentu dapat menunjukkan di bagian mana yang perlu underdamped. Yang pasti, sistem pengendalian tidak pernah menghendaki sistem yang tidak stabil, tidak yang sustain oscillation, apalagi yang undamped.
Pada response sustain oscillation, process variable tidak pernah sama dengan set point. Process variable naik turun di sekitar set point seperti roda sepeda yang sedangberputar. Oleh karena sifat inilah, sustain oscillation juga disebut cycling. Ada beberapaliteratur bahasa Indonesia yang menyebutkan sustain oscillation sebagai osilasi dengan amplitudo tetap. Persamaan keadaan sustain oscillation ini dengan kerja bandul lonceng yang selalu berayun dengan amplitudo dan kecepatan tetap.
Pada response undamped, process variable berisolasi dengan amplitudo yang semakin besar. Process variable semakin lama semakin mendekati set point, dan pada keadaan itu control valve akan terbuka tertutup secara bergantian. Akibatnya terciptalah keadaan yang sangat berbahaya seperti yang terjadi pada feed back positif. Keadaan sustain oscillation dengan amplitudo kecil di sebagian proses dapat ditolelir sebentar demi untuk penyetelan control unit (tuning). Namun keadaan undamped tidak dapat ditolelir dalam keadaan bagaimanapun juga.
Kedua keadaan tidak stabil di atas adalah keadaan yang paling tidak dikehendaki dalam sistem pengendalian.
2. APAKAH DINAMIKA PROSES ITU?
Mengendalikan suatu proses dapat disamakan dengan mengemudikan suatu kenderaan. Untuk mengemudi mobil kecil diperlukan keterampilan yang berbeda dengan mengemudi mobil besar. Kalau sebuah truk gandeng dibelokkan dengan cara yang sama dengan membelokkan minibus, bukan tidak mungkin truk gandeng itu akan terbalik, karena masing-masing mempunyai massa (berat), sifat serta kestabilan yang berbeda-beda. Ada yang mudah dibelokkan, ada yang sulit dibelokkan (karena berat), ada yang cukup stabil, dan ada pula yang mudah terbalik. Itulah sebabnya diadakan klasifikasi surat izin mengemudi kenderaan.
Hal yang sama terjadi dalam sistem pengendalian. Ada process variable yang cepat berubah dengan berubahnya manipulated variable (bukan control valve), ada pula yang lambat berubah. Ada proses yang sifatnya lembam, ada yang reaktif, ada yang mudah stabil, ada pula yang mudah tidak stabil. Jadi seperti sifat kenderaan tadi, cara mengendalikan proses juga berbeda-beda. Dalam sistem pengendalian, sifat-sifat proses itu disebut dinamika proses (process dynamic) yang sangat ditentukan oleh transfer function suatu sistem pengendalian.
Dinamika proses selalu dikaitkan dengan unsur kapasitas (capacity) dan kelambatan (lag). Ambil sebagian contoh aktivitas meniup balon karet mainan anak-anak. Balon bisa ditiup dengan mulut, bisa ditiup dengan pompa sepeda, dan bisa juga ditiup dengan kompressor. Balon akan lama mengembang bila ditiup dengan mulut: akan sedikit lebih cepat bila ditiup dengan pompa sepeda: dan akan cepat meletus kalau ditiup dengan kompressor. Ketiga
keadaan ini menggambarkan adanya unsur kapasitas dan unsur kelambatan di dalam proses meniup balon.
Besarnya kapasitas balon menjadi sangat relatif karena harus selalu dikaitkan dengan apa balon itu ditiup. Dalam bahasa ilmu sistem pengendalian, dikatakan kapasitas proses tergantung pada sumber energi yang bekerja pada proses. Karena sumber kerjanya kecil dan kapasitas prosesnya besar, proses akan berjalan lambat. Kalau sumber energinya besar dan kapasitas prosesnya kecil, proses akan menjadi cepat. Tampak jelas ada keterkaitan antara kapasitas dan kelambatan proses.
Kata kapasitas dan keterlambatan itulah yang kemudian dipakai sebagai standar (ukuran) untuk menyatakan dinamika proses secara kualitatif. Dalam bentuk kualitatif, proses dibedakan menjadi proses cepat dan proses lambat, atau berkapasitas besar dan berkapasitas kecil.
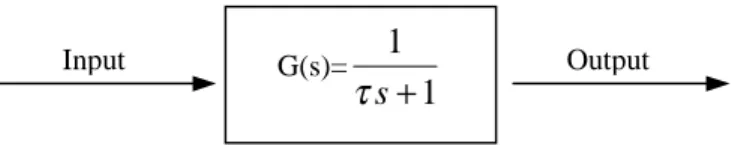
Selain bentuk kualitatif, dinamika proses juga dinyatakan secara kuantitatif dalam bentuk transfer function. Istilah tranfer function di sini tetap merupakan perbandingan antara output dengan input proses. Seperti digambarkan dalam bentuk blok diagram berikut :
Gambar 2. Diagram kotak sebuah proses
Hanya saja bentuk trasfer function di sini menjadi lebih kompleks karena akan digunakan untuk mengungkapkan dinamika proses.
Transfer function (G(s)) mempunyai dua unsur gain, yaitu steady state gain dan dynamic gain yang sifatnya dinamik. Unsur dyanmic gain muncul karena elemen proses mengandung elemen kelambatan. Oleh karena itu, bentuk transfer function elemen proses hampir pasti berbentuk persamaan matematis fungsi waktu, yang dalam wujud persamaan differensial.
Dinamika proses dinyatakan dalam bentuk transfer function yang kemudian ada dalam bentuk persamaan differensial. Karena jenis kelambatan yang dikandung oleh proses, bentuk persamaan differensial itu ada yang berpangkat satu, ada yang berpangkat dua, ada pula yang berpangkat banyak.
Klasifikasi jenis proses kemudian dikelompokkan berdasarkan banyaknya pangkat persamaan differensial yang dalam tranfer function. Kalau dikaji ulang, pengelompokkan ini mirip dengan pengelompokkan yang dilakukan untuk jenis surat izin mengemudi kenderaan. Semankin banyak persamaan diferensial, semangkin lambat dinamika proses. Sebuah elemen proses kemudian dinamai proses orde satu ( first order process ) karena persamaan diferensialnya berpangkat satu. Dinamai proses orde dua ( second order process ) karena persamaan diferensialnya berpangkat dua. Dinamai proses orde banyak ( higher order process ) karena persamaan diferensialnya berpangkat banyak. Pangkat persamaan dalam diferensial juga mencerminkan jumlah kapasitas yang ada di elemen proses. Suatu proses orde satu juga disebut one capacity process atau single capacity process. Proses orde dua juga disebut two capacity process. Proses orde banyak disebut multi capacity process.
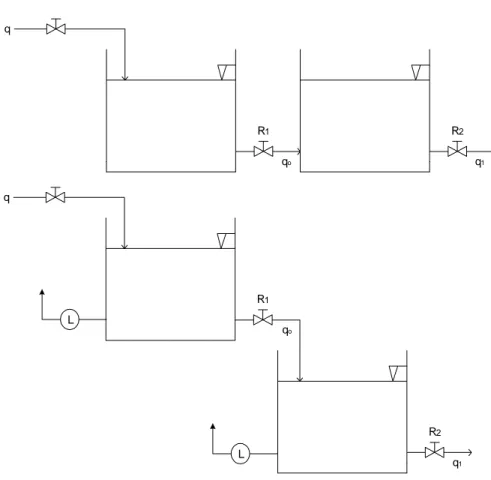
Berikut ini digambarkan beberapa sistem pengendalian yang menggambarkan jumlah kapasitas dan fungsi trasfernya yang akan dibahas pada pokok bahasan berikut. Gambar 3
G(s)
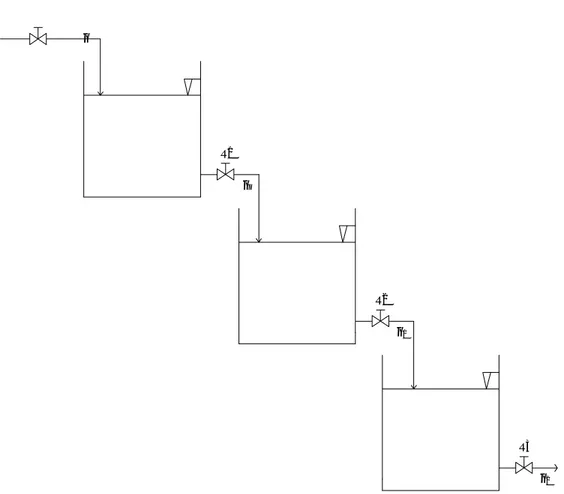
Outputmenampilkan single capacity process ; Gambar 4 menampilkan two capacity process ; Gambar 5 menampilkan multi capacity process.
L h q R qo
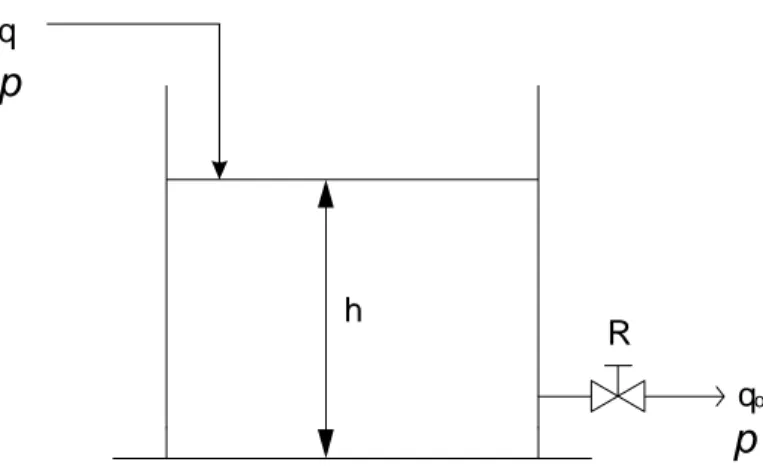
Gambar 3. Proses orde satu (single capacity process)
q R1 qo R2 q1 q R1 qo R2 q1 L L
R3 q2 q R1 qo R2 q1
Gambar 5. Proses orde banyak (multi capacity process)
Sampai disini penjelasan diatas mungkin masih belum membawa banyak penjelasan bagi pembaca yang belum mengenal persamaan diferensial. Apakah persamaan diferensial itu dan unsur kelambatan. Hal ini akan dibahas tuntas dengan disertai contoh-contohdidalam penjelasan berikut. Banyaknya contoh, diharapkan akan memperjelas apakah proses orde satu, proses orde dua, proses orde banyak.
3. PROSES ORDE SATU (LINIER OPEN LOOP SYSTEM) SELF REGULATION
Didalam ilmu sistem pengendalian, dikenal sebuah elemen proses yang mampu mengendalikan dirinya sendiri, walaupun padanya tidak dipasang instrumentasi pengendalian otomatis. Elemen proses yang mempunyai tipe begitu disebut elemen proses self regulation. Contoh elemen proses self regulation dapat dilihat pada gambar 3. Contoh didalam gambar ini merupakan contoh paling spesifik yang selalu dipakai sebagai bahan untuk menerangkan proses orde satu self regulation.
Bagaimana elemen proses ini dapat mengendalikan dirinya sendiri, ikutilah proses itu sebagai berikut. Input proses pada contoh ini adalah flow ke tangki (Q) dan outputnya adalah level ke tangki, yang dalam hal ini dapat dibaca sebagai sinyal output dari LT ( level teansmiller ). Pada keadaan awal, diandaikan level ada di 50% tangki Q dan Qo juga sama dengan 50%
skala flow. Pada keadaan awal ini semua parameter seimbang, sehingga level tetap di 50% sampai terjadi perubahan pada Qo sebesar qo.
Andai kata keadaan setimbang terganggu karena Q naik secara mendadak sebanyak q 100% dan dibiarkan tetap selama proses berlangsung. Dalam ilmu pengendalian proses disebut step input. Dengan bertambah Q, level sebesar h akan secara alami akan ikuti oleh kenaikan Qo sebesar qo sehingga akan dicapai keseimbangan yang baru dimana Q sama dengan Qo. Level akan berhenti dikeseimbangan yang baru itu selama tidak terjadi perubahan Q maupun Qo. Keseimbangan baru ini pasti ada diatas 50% dan Q maupun Qo juga ada diatas 50% skala flow. Keadaan mencapai keseimbangan sendiri inilah yang disebut self regulation.
Andaikata keseimbangan baru terjadi pada level 70%, steady state gain dari proses itu dikatakan sama dengan dua (Gp = 2). Mengapa demikian ? Karena untuk 10% pertambahan input (q) akhirnya dihasilkan 20% pertambahan output (h) . Tentu saja keadaan self regulation ini hanya terjadi untuk batas-batas tertentu. Yang jelas, kalau diandaikan Gp = 2 , Q tidak pernah boleh ditambah lebih dari 25%. Kalau Q ditambah lebih besar dari 25%, air akan tumpah keluar dari tangki.
Lalu, apakah keadaan proses diatas bisa disebut self regulation ? Keadaan tumpahnya air memang bisa terjadi, bahkan juga pada sistem yang dilengkapi pengendalian otomatis sekalipun. Hal ini disebabkan karena sistem pengendalian hanya mampu mengatasi load atau disturbance sampai batas-batas tertentu saja.
Selain itu, istilah self regulation hanyalah suatu cara untuk menggambarkan dinamika suatu elemen proses. Istilah ini sama sekali tidak dimaksudkan untuk menggambarkan cara pengendalian proses. Istilah self regulation kekal menjadi sangat penting, dan akan dipakai berulang kali karena kelak akan dilihat bahwa elemen proses self regulation akan sangat berbeda dengan elemen proses non self regulation.
Dari semua penjelasan tentang kerja proses self regulation di atas, sangat jelas bahwa proses pada Gambar 2 memerlukan waktu untuk mencapai keseimbangan baru. Jadi, transfer function proses itu pasti merupakan persamaan fungsi waktu. Dari gambar jelas terlihat bahwa proses hanya mempunyai satu unit kapasitas (tangki). Dari situ dapat ditarik kesimpulan bahwa proses ini pasti proses orde satu self regulation. Bentuk diagram kotak serta transfer function proses dapat dilihat pada gambar 6.
Gambar 6. Diagram kotak proses orde satu self regulation.
Bentuk transfer function pada gambar 6 itulah yang disebut bentuk persamaan differensial pangkat satu. Simbol s pada persamaan differensial itu adalah bentuk transformasi Laplace. Transfer function untuk proses orde satu non self regulation dapat diturunkan sebagai berikut : (perhatikan gambar 7 di bawah ini)
G(s)=
1
1
+
s
τ
Output Inputh
q
R
q
op
p
Gambar 7. Proses orde satu self regulation Neraca massa pada tangki di atas adalah :
dt
dh
A
q
q
ρ
ρ
ρ
−
0=
... 3.1) Asumsikan harga adalah konstan, maka persamaan menjadi :dt
dh
A
q
q
−
o=
... 3.2)Dalam keadaan steady state persamaan 3.2) di atas dapat dituliskan sebagai berikut :
0
=
−
q
oq
... 3.3) Deviasi keadaan non steady state dapat dituliskan :dt
h
h
d
A
q
q
q
q
s so o s)
(
)
(
)
(
−
−
−
=
−
... 3.4) dimana :q
−
q
s=
Q
o soQ
q
q
−
=
H
h
h
−
s=
maka persamaan 3.4) dapat ditulis :
dt
dH
A
Q
Q
−
o=
... 3.5)karena aliran fluida bersifat laminar, qo mempunyai hubungan linier dengan H, maka :
R
H
Q
R
h
q
o=
→
o=
... 3.6)dengan menggabungkan persamaan 3.5) dan 3.6) dihasilkan :
dt
dH
A
R
H
Q
−
=
dt
dH
AR
H
RQ
−
=
dt
dH
H
RQ
−
=
τ
... 3.7) dimana : τ = konstanta waktu ( time konstan atau lag time)A = luas penampang tangki R = hambatan pada katup
Persamaan 3.7) dapat ditransformasikan dalam bentuk transformasi Laplace yang menghasilkan :
)
(
).
(
)
(
)
(
s
H
s
s
H
s
RQ
−
=
τ
... 3.8) Transformasi persamaan 3.6) menghasilkan :R
s
H
s
Q
o)
(
)
(
=
... 3.9))
(
)
(
s
RQ
s
H
=
... 3.10) dengan menggabungkan persamaan 3.8) dan 3.10) akan diperoleh :
1
)
(
)
(
+
=
s
R
s
Q
s
RQ
oτ
1
1
)
(
)
(
+
=
s
s
Q
s
Q
oτ
... 3.11) dari persamaan persamaan 3.8) dapat diselesaikan sebagai berikut :)
(
).
(
)
(
)
(
s
H
s
s
H
s
RQ
−
=
τ
RQ
(
s
)
=
{
τ
(
s
)
+
1
}
H
(
s
)
1
)
(
)
(
)
(
+
=
s
R
s
Q
s
H
τ
... 3.12) Andaikata nilai R adalah 1 satuan maka persamaan 3.12) dituliskan berikut :
1
1
)
(
)
(
+
=
s
s
Q
s
H
τ
... 3.13)Jika diperhatikan benar persamaan 3.11) dan 3.12) terlihat jelas bahwa kedua persamaan tersebut mengandung undur waktu yang dinyatakan oleh lag time τ. Ruas kanan pada persamaan 3.11) sampai dengan 3.13) ditandai oleh spesifik oleh :
1
1
+
s
τ
yang merupakan karateristik dinamika proses pada proses elemen orde satu self regulation atau linier opeen loops system self regulation.
Persamaan 3.11) merupakan transfer function yang menyatakan hubungan kecepatan alir fluida yang masuk ketangki, dan persamaan 3.12) merupakan transfer finction yang menyatakan hubungan antara level didalam tangki dengan kecepataan alir fluida yang masuk kedalam tangki.
Untuk menggambarkan dinamika proses elemen proses pada gambar 7 diatas harus digambarkan waktu kedua transfer function elemen proses proses diatas dengan terlebih dahulu mengubah kedua persamaan tersebut kedalam fungsi waktu dengan invers Transformasi Laplace.
Marilah kita ikuti perubahan persamaan 3.13) menjadi persamaan invers transformasi Laplace.
1
1
)
(
)
(
+
=
s
s
Q
s
H
τ
Andaikata input proses Q(s) merupakan step input (input proses dinaikkan dengan besar tertentu lalu dibiarkan konstan selama proses berlangsung), maka :
Q
=
A
(step input)s
A
s
Q
(
)
=
... 3.14) maka dengan menggabungkan persamaan 3.13) dan 3.14) akan diperoleh hubungan :)
1
(
1
.
)
(
+
=
s
s
A
s
H
τ
... 3.15) dengan metode partial fraction persamaan 3.15) dapat diselesaikan :)
1
(
)
1
(
)
(
τ
τ
τ
+
=
+
=
s
s
A
s
s
A
s
H
... 3.16))
1
(
)
1
(
)
(
1 2τ
τ
τ
+
+
=
+
=
s
C
s
C
s
s
A
s
H
... 3.17)ambil S = 0, setelah dikalikan dengan S maka persamaan 3.17) berubah menjadi :
)
1
(
)
1
(
2 1τ
τ
τ
+
+
=
+
s
C
C
s
A
maka :
A
C
A
C
1=
→
1=
1
τ
τ
Kembali kedua ruas dikalikan dengan (s + 1/τ), maka :
1
)
21
(
C
s
s
C
s
A
+
+
=
τ
τ
ambil nilai s = - 1/τ maka C2 = -A dan persamaan3.17) menjadi :
)
1
(
)
(
)
(
τ
+
−
+
=
s
A
s
A
s
H
...3.18)dengan invers transformasi Laflace, persamaan 3.18) dapat diperolen respons elemen proses pada taangki digambar 7 yang dlam ilmu sistem pengendaian disebut hasil kerja sistem pengendalian atau transient respons.
Dengan demikian persamaan 3.18) berubah menjadi :
...3.19)
atau
dimana : Gp = steady state gain = ( 1 – e-t/τ)
Jika persamaan 3.19) digambarkan sebagai kurva waktu maka dapat dibuat sebagai berikut (dengan input berupa input step) :
waktu Tinggi
level
t =
t = 2
t = 3
t = 4
t = 5
H(t)/A = 1-e
-1=0,632
H(t)/A = 0.865
H(t)/A = 0.95
H(t)/A = 0.98
H(t)/A = 0.993
A
e
t
H
(
)
=
(
1
−
−tτ)
Output = Gp x input
t = 6
t = 7
H(t)/A = 0.997
H(t)/A = 0.999
Kurva waktu proses pada gambar 6 dapat digambarkan seperti yang ditampilkan pada gambar 8.
f
1 Waktu Input Output Waktu 1f
x
Gp
1τ
2
τ
13
τ
14
τ
1 63,2%86,4% 95% 98,16%Gambar 8a. Kurva Waktu Proses Orde Satu Self Regulation dengan input
Fungsi matematik yang telah diturunkan di atas tidak terasa terlalu rumit kalau saja hubungan input - output diterangkan secara grafis. Yang penting dicatat dari transfer function itu adalah parameter τ yang disebut sebagai lag time atau time constant. Kalau luas penampang tangki A, dan hambatan yang ditimbulkan oleh bukaan control valve ditandai dengan R, besarnya τ adalah RA.
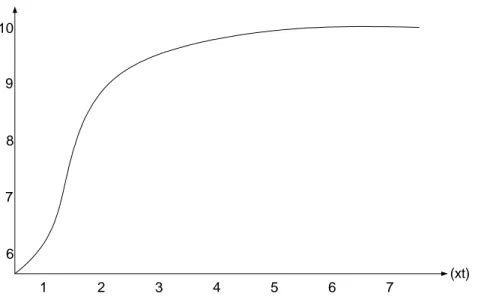
Sekarang mari kita lihat input - output proses orde satu self regulation dalam kaitannya dengan unsur waktu. Ada beberapa titik penting yang perlu dicatat dari kurva waktu pada gambar 8b. Titik pertama adalah titik dimana output sama dengan 63,2% dari keadaan steady state-nya. Di dalam contoh ini, output sama dengan 63,2% dari level keseimbangan baru. Di titik itu, t (waktu) tepat sama τ. Titik penting lain adalah titik dimana output mencapai 98,16% dari keseimbangan baru. Di titik itu t = 4τ. Secara teoritis, karena naiknya output semakin lama
semakin lambat, output sebenarnya tidak akan pernah mencapai Gp x input. Tetapi dalam praktek, output sudah boleh dianggap sebesar Gp x input pada waktu t > 4τ.
6 7 8 9 10 1 2 3 4 5 6 7 (xt)
Gambar 8b. Kurva hasil kerja proses orde satu self regulation dengan step input
Pada contoh ini, kalau lag time atau time constant elemen proses besarnya 5 menit (τ = 5 menit), output akan mencapai 63,2% x input dalam waktu 5 menit. Atau output akan mencapai 98,16% x input dalam waktu 4 x 5 menit.
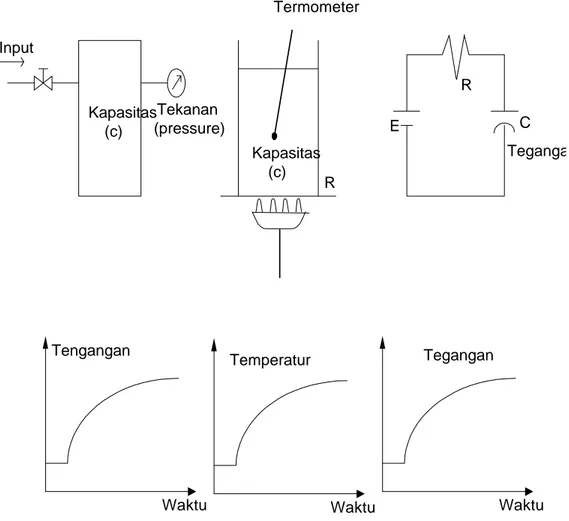
Ada banyak proses orde satu self regulation yang ditemukan di dalam proses industri. Beberapa diantaranya dapat dilihat pada gambar 9.
Input Kapasitas (c) Tekanan (pressure) Termometer Kapasitas (c) R R C E Teganga Tengangan
Waktu Waktu Waktu
Temperatur Tegangan
Gambar 9. Contoh-contoh proses orde satu self regulation
Jika kita perhatikan benar ruas kiri pada persamaan 3.12) dan 3.13) maka kurva waktu keduanya akan sama dengan kurva waktu untuk masing-masing persamaan 3.12) dan 3.13) sangat tergantung dari harga lag time atau time constant sistem pengendalian pada gambar 7. Kalau lag time kecil, level cepat naik; dan kalau lag time besar, level lambat naik.
Kembali kita perhatikan persamaan 3.7) pada halaman….., besar lag time dipengaruhi oleh luas penampang tangki (A) dan hambatan pada katup ( R ). Dengan demikian jelas bagi kita bahwa output process (tangki) yang diberi simbol h akan sangat dipengaruhi luas penampang tangki (A), artinya jelas bagi kita bahwa kenaikan level pada tangki akan cepat jika luas penampang tangki kecil dan kenaikkan level pada tangki akan lambat jika luas penampang tangki besar. Apakah dampak dari perubahan luas penampang tangki ini ? Dengan memeperhatikan kembali persamaan 3.12) dan 3.13), pertanyaan ini dapat dijawab dengan mudah, bahwa level pada tangki dengan luas penampang lebih kecil akan lebih cepat mencapai keseimbangan sendiri atau lebih cepat meluap (over flow) jika input process telah melampaui kemampuan tangki. Sebaliknya level pada tangki dengan luas penampang yang lebih besar akan lebih lambat mencapai keseimbangan sendiri atau meluap.
Perubahan harga lag time atau luas penampang tangki akan memberikan dampak yang berbeda dalam cara mengendalikan sistem pengendalian proses orde satu self regulation lain maupun dalam pemilihan alat pengendali (controller) atau control valve untuk tujuan otomatisasi (diubah menjadi cloosed lop system).
Untuk proses dengan lag time yang semakin kecil controller yang dipakai haruslah mempunyai reaksi tertutup terbuka yang lebih cepat yang sesuai dengan kecepatan perubahan output (k) yang dapat diatur sedemikian rupa untuk kepentingan proses.
Perubahan lag time atau luas penampang tangki (process), tidak saja mempengaruhi pemilihan controller atau control valve, dalam kenyataan di lapangan juga sangat mempengaruhi pemasangan katup isolasi disekitar control valve. Salah satu diantaranya adalah pemasangan katup by pass control valve yang dapat dimanfaatkan untuk memperbesar gain suatu proses, sehingga lebih cepat mencapai suatu keseimbangan. Perhatikan kembali persamaan 3.12) dan 3.13). Itulah sebabnya control valve pada sistem pemipaan selalu dilengkapi dengan katup by pass, agar proses mudah mencapai keseimbangan jika proses telah mencapai batas maksimalnya.
Output proses tidak hanya sangat dipengaruhi oleh lag time atau time constant yang terdapat pada fungsi transfer elemen process, tetapi juga sangat dipengaruhi oleh input process yang masuk pada suatu elemen proses.
Untuk lebih memahami pengaruh input proses terhadap output process pada pokok bahasan berikut dijelaskan dengan persamaan matematis dan kurva waktu. Pada pokok bahasan ini akan diperkenalkan istilah phase lag dan phase lead yang sangat berpengaruh pada dinamika proses atau hasil kerja sistem pengendalian proses orde satu non self regulation dengan input process berupa gelombang sinusoida.
4. INPUT SINUSOIDA PADA PROSES ORDE SATU (SINGLE CAPACITY PROCESS)
Sebelum penjelasan secara grafis diberikan, lebih dahulu penulis menampilkan persamaan matematis untuk mendapatkan output process sebagai fungsi waktu. Bagi pembaca yang tidak tertarik dengan penampilan persamaan-persamaan matematis berikut, jangan ragu-ragu untuk meninggalkannya tanpa rasa khawatir akan kehilangan pengertian dinamika proses pada pokok bahasan ini, karena akan dijelaskan secara grafis dengan jelas dan tuntas akan pengaruh input sinusoida pada proses orde satu (single capacity process).
Marilah kita ikuti penurunan persamaan matematis sebagai response atas input process berupa gelombang sinusoida pada sebuah termometer yang ditempatkan pada sebuah kotak bertemperatur (temperature of bath).
Temperatur bath setiap saat dinyatakan oleh persamaan
0
sin
>
+
=
x
A
t
t
x
sω
... 4.1) dimana : x = temperatur bathxs= temperatur bath sebelum input sinusoida diberikan A = amplitudo dari variasi temperatur
ω = frekuensi input temperatur, rad/satuan waktu
Deviasi temperatur batch dan temperatur batch sebelum input sinusoida diberikan dinyatakan dengan x, maka :
s
x
x
x
=
−
... 4.2) maka persamaan 4.1) berubah menjadi :
x
=
A
sin
ω
t
... 4.3) Jika persamaan 4.3) ditransformasi Laplace-kan maka diperoleh persamaan :2 2 ) (
ω
ω
+
=
S
A
x
S ... 4.4) Untuk proses orde satu (single capacity) Transfer function adalah :1
1
)
(
)
(
)
(
+
=
=
=
s
s
x
s
Y
input
output
s
G
τ
... 4.5)1
1
)
(
)
(
+
⋅
=
s
s
x
s
Y
τ
(
1
)
1
)
(
2 2+
⋅
+
=
s
S
A
s
Y
τ
ω
ω
τ
τ
ω
ω
1
1
)
(
2 2+
⋅
+
=
s
S
A
s
Y
... 4.6)(
τ
)(
ω
)(
ω
)
τ
ω
j
S
j
S
S
A
s
Y
−
+
+
=
1
)
(
(
τ
) (
ω
) (
S
j
ω
)
C
j
S
C
S
C
s
Y
−
+
+
+
+
=
1 2 31
)
(
... 4.7)Jika persamaan 4.7) dikalikan dengan
(
S
+
1
τ
)
maka akan diperoleh persamaan 4.8) :(
)(
)
(
(
)
)
(
(
ω
)
)
τ
ω
τ
ω
ω
τ
ω
j
S
S
C
j
S
S
C
C
j
S
j
S
A
−
+
+
+
+
+
=
−
+
1
1
3 2 1Jika diambil
s
=
−
1
τ
akan diperoleh nilai C1 sebagai berikut :( )
2 2 2 2 11
τ
ω
τ
ω
ω
τ
ω
+
=
+
=
A
S
A
C
1
1
2 2 2 2 2 1+
=
+
=
τ
ω
ωτ
τ
τ
ω
τ
ω
A
A
C
... 4.8)Lalu persamaan 4.7) dikalikan dengan (s + jω) maka harga C2 diperoleh sebagai berikut :
(
)(
)
(
(
)
)
(
(
ω
)
)
ω
τ
ω
ω
ω
τ
ω
j
S
j
S
C
C
S
j
S
C
j
S
j
S
A
−
+
+
+
+
+
=
−
+
3 2 11
Ambil s = -jω, maka :(
τ
)(
ω
)
τ
ω
j
S
S
A
C
−
+
=
1
2(
ω
τ
)(
τ
ω
)
τ
ω
j
j
A
C
−
+
−
=
1
2(
τω
τ
ω
τ
)
τ
ω
j
A
C
−
−
=
2 2τ
ω
τ
ω
τ
τ
ω
j
A
C
−
−
=
2 2(
)
(
2 21
)
2+
+
−
=
τ
ω
τ
τ
ω
j
A
C
... 4.9)Berdasarkan sifat conjugat, maka :
(
)
(
2 21
)
3−
−
−
=
τ
ω
τ
τ
ω
j
A
C
... 4.10) Misalkanj
k
k
s
j
i
b
i
x
2 1+
+
+
compleks conjugatj
K
K
s
j
b
a
2 1 2 2+
+
−
transformasi Laplace persamaan ini menghasilkan persamaan 4. 11) dibawah ini ;
(
a
k
t
b
k
t
)
e
kt 1cos
2 1sin
22
1+
... 4.11) dari harga C2 dan C3 dapat dilihat harga a1, a2, k1, dan k2 sebagai berikut :(
)
,
0
1
1 2 2 1=
−
+
k
=
a
a
ω
τ
τ
τ
ω
(
)
,
0
1
2 2 2 2=
−
+
k
=
a
b
ω
τ
τ
τ
ω
maka transformasi Laplace persamaan 4.7) akan menghasilkan persamaan 4.15)
( )
(
)
+
(
+
)
+
−
+
+
=
− −ω
τ
τ
ω
τ
τ
ω
τ
ω
τ
τ
ω
ω
τ
τ
ω
τ θsin
1
cos
1
2
1
2 2 2 2 2 2A
A
e
e
A
t
Y
t t( )
(
)
(
)
+
−
+
−
+
=
−ω
τ
ω
τ
τ
ω
ω
τ
τ
ω
ω
τ
τ
ω
τsin
1
cos
1
1
2 2 2 2 2 2A
A
e
A
t
Y
t...4.12)
Sifat : cos A + q sin A = r sin (
ωτ
+
θ
) ... 4.13)
Dimana : 2 2q
p
r
=
+
maka 2 2 2 2 2 21
1
+
+
+
=
ω
τ
ω
τ
τ
ω
A
A
r
(
) (
2 2)
2 2 2 2 2 2 2 21
1
+
+
+
=
ω
τ
ω
τ
τ
ω
A
A
r
1
2 2+
=
τ
ω
A
r
... 4.14)Sudut ohase antara p danq adalah :
1
1
2 2 2 2+
+
−
=
=
ω
τ
ω
τ
τ
ϖ
φ
A
A
q
p
tg
τ
ω
φ −
=
tg
danφ
=
arc
tg
(
−
ω
τ
)
Dengan memasukkan harga-harga pada persamaan 4.10) dan 4.14) pada persamaan 4.12) akan diperoleh persamaan 4.15) sebagai berikut :
p
( )
(
ω
τ
φ
)
ω
τ
ω
τ
τ
ω
τ+
+
+
+
=
−sin
1
1
2 2 2 2A
e
A
t
Y
t jika t = α( )
(
ω
τ
φ
)
ω
τ
+
+
=
sin
1
2 2A
t
Y
... 4.15)dimana adalah phase lag atau phase shift jika φ< 0.
Untuk lebih memahami response di atas pada persamaan 4.15) berikut ini akan diberikan contohnya.
Andaikata sebuah termometer air raksa yang mempunyai lag time atau time constant ditempatkan pada sebuah temperatur bath pada suhu 100 oF lalu dibiarkan sampai temperatur termometer menunjukkan sama dengan Temperature Bath. Setelah mencapai kesetimbangan temperatur bath (merupakan input process pada termometer) mulai dibuat bervariasi dengan tempertur rata-rata 100 oF dan amplitudo 2 oF. Andaikan saja frekuensi osilasi temperatur bath (frekuensi osilasi input process) adalah 10/π cycle/menit. Bagaimanakah dinamika proses termometer dengan input process seperti dikemukakan di atas ?
Sebelum kita menggambarkan kurva waktu antara temperatur hasil pengukuran termometer dan waktu terlebih dahulu menentukan harga phase lag atau phase shift output process (temperatur hasil pengukuran termometer).
Dengan memperhatikan contoh pada termometer air raksa di atas maka kita peroleh harga-harga untuk besaran-besaran sebagai berikut :
Lag time termometer (τ) = 0.1 menit
Temperatur bath sebelum diberikan input sinusoida (xs) = 100 oF Amplitudo temperatur bath (input process), A = 2 oF
Frekuensi osilasi input process = 10/π cycle/menit
Dari harga-harga besaran di atas kita peroleh harga :
mnt
rad
f
2
10
20
2
=
=
=
π
π
π
ω
maka harga :
F
A
0 2 24
1
0
,
896
2
1
=
+
=
+
ω
τ
dan phase lag atau phase shift ditentukan sebagai berikut :
(
ω
τ
)
φ
=
arc
tg
−
(
−
20
×
0
,
1
)
=
arc
tg
φ
05
,
63
−
=
φ
dengan demikian response atau transient response termometer diatas adalah : Y (t) = 0,896 sin (20t - 63,50)
Dengan persamaan ini dapat dibuat kurva waktu temperatur hasil pengukuran termometer (output process) dengan waktu t.
Harga phase lag atau phase shift dalam satuan waktu sebagai berikut :
(
waktu
untuk
cycle
)
Lag
1
360
×
= π
ataumenit
Lag
0
,
0555
10
360
5
,
63
×
=
=
π
Dengan persamaan 4.16) dapat digambarkan kurva waktu termometer
pada Gambar 10.
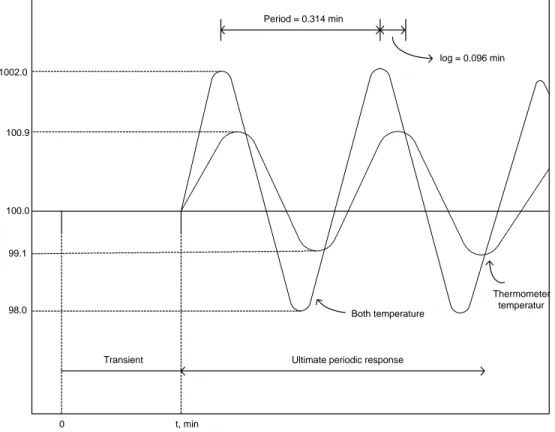
1002.0 100.9 100.0 99.1 98.0 0 t, min Period = 0.314 min log = 0.096 minTransient Ultimate periodic response Both temperature
Thermometer temperatur
Gambar 10. Response process orde satu dengan input sinusoida
Kurva yang digambarkan dengan garis putus-putus menggambarkan response (output process) yang diberikan oleh termometer, sedangkan grafik yang tidak terputus-putus menggambarkan input process (temperature of bath), keduanya dalam bentuk sinusoida. Dengan memperhatikan kedua diagram tersebut pada gambar 10 akan dapat kita lihat temperatur bath (sebagai input process) tidak pernah sama dengan temperatur yang ditampilkan oleh temperatur (sebagai output process) pada waktu yang sama. Ini berarti ada kelambatan (lag) antara output dengan input process dalam hal ini. Lihatlah, pada saat temperatur bath 1000F,temperatur yang terbaca pada termometer adalah 99,30F pada waktu
yang sama, bukan 1000F. Demikian juga saat temperatur bath dinaikkan menjadi 1020F, temperatur yang ditampilkan oleh termometer paling tinggi hanya 100,90F setelah 0,056 menit sejak temperatur bath mencapai 1020F, karena phase lag atau phase shiftnya adalah 0,056 menit (-63,50). Demikian pula jika temperatur bath dikurangi perlahan menjadi 980F maka temperatur (output process) hanya 99,10F, bukan 980F, itupun setelah 0,056 menit temperatur bath 980F pada bath tercapai. Keadaan ini terus berulang jika temperatur bath dibuat bervariasi dengan amplitudo 20F. Hal yang dapat kita catat dari kurva waktu di atas adalah bentuk dinamika proses (output process) adalah sama dengan input process dengan periode yang sama, dalam hal ini 0,314 menit, akan tetapi yang paling penting dicatat adalah selalu terjadi kelambatan (lag) 0,056 menit pada output process sejak input process diberikan. Jadi output process tidak langsung muncul begitu input process diberikan. Mengapa demikian ? Karena terdapat phase lag atau phase shift. Karena besaran ini output process pada saat yang sama dan selalu lebih rendah dari output process. Artinya output process tidak akan pernah mewakili input process. Seperti yang dijelaskan sebelumnya bahwa jika temperatur bath dibuat 1020F, maka temperatur yang ditampilkan termometer adalah 100,90F setelah 0,056 menit.
Apakah dampak dari dinamika proses yang demikian pada kenyataannya di lapangan ? Dinamika proses yang demikian akan menimbulkan dampak pada cara pengendalian dan sistem monitoring pada sistem pengendalian, karena faktor kelambatan dalam hal ini adalah phase lag atau phase shift. Pada kenyataannya output process baru muncul setelah input process diberikan setelah selang waktu tertentu, sehingga setiap output process baru dapat dinyatakan sebagai harga yang tetap jika telah konstan untuk selang waktu tertentu, untuk mewakili harga output process yang aktual.
Akan tetapi keadaan yang terjadi pada contoh pada gambar 10 (diberikan input sinusoida pada termometer), output process tidak akan dapat mewakili harga yang aktual atas temperatur bath (input process), bahkan selalu lebih rendah dari input process, karena adanya phase lag atau phase shift. Dapat dibayangkan jika temperatur 3000F terhunjuk misalnya 2900F oleh temperatur, kecepatan aliran 3000 kg/hr terhunjuk misalnya 2900 kg/hr, konsumsi NG 500 Nm3/hr terhunjuk 450 Nm3/hr misalnya oleh flowmeter. Keadaan ini akan menyebabkan analisa yang salah pada suatu variable process yang dapat menyebabkan sistem pengendalian tidak stabil, sehingga sulit untuk mencapai spesifikasi produk dan kuantitas produk.
DAFTAR PUSTAKA
BA Software, Feddback Feedforward, Instrument Society of America, 1989.
Coughanowr, Koppel. Process System Analysis and Control. International Student Edition, Mc Graw Hill Kogakusha Ltd, Tokyo, 1965.
Douglas M. Considine, S.D. Ross, Handbook of Applied Instrumentation, Mc Graw Hill, New York, USA, 1964.
F.G. Shinskey, Process Control System Problem-Solving Software, Foxboro Company, 1990. H.W. Boger, Lucien Marot, Why Valves Are Always Oversized, Instrument Society of America