Decision Tree Analysis for Humanoid Robot Soccer
Goalkeeper Algorithm
Silvester Kristian Sungkono, Banu Wirawan Yohanes
∗, Daniel Santoso
†Faculty of Electronic and Computer Engineering Satya Wacana Christian University Salatiga, Central Java 50711, Indonesia
Email:∗[email protected],†[email protected]
Abstract—Latest humanoid robot soccer competition rule specifies larger field, wider goal line, and more number of robotics available for a team than before. In consequence, the humanoid goalkeeper needs to be more responsive in adjusting its position to follow ball movement and to react precisely to block incoming shots. Both the robotic control system and algorithm have to be refined. In this article, the humanoid goalkeeper algorithm is extended by utilizing compass to help with direction, using inter-robots communication to share information regarding ball location, using head servo orientation to look around, providing vision via Android smartphone camera, and employ landmarks in the field to provide guidance. There are many attributes perceived by robot sensors in preparing robotic motions and strategy. Each attribute is considered as a random event with uncertain values. Here, decision tree analysis based on entropy and information gain are used to evaluate the uncertainty. Overall, there are some improvements for the humanoid goalkeeper performance.
Keywords—humanoid goalkeeper, entropy, decision tree
I. INTRODUCTION
Robotics technology is ubiquitous, particularly humanoid and intelligent robotics. Humanoid robotics composed of human-like parts as actuators and equipped with sensors to emulate human acts and senses. One of the humanoid robotics competition which attracts many researches and student teams is robot soccer.
In a robot soccer match, a humanoid goalkeeper is assigned to protect goal. To achieve a good performance, the robot should be capable to block incoming shots, to clear ball away from penalty area, to move swiftly between goal post, and to positioning itself efficiently in a strategic way in order to support both defense and counter-attack whenever possible.
There are several factors to be considered by the humanoid goalkeeper, such as standby position between goalpost, incom-ing shots direction, anticipation movement, and time response to block incoming shots, passing ball to ally robots, and to return back to the goal line after being picked-up. Based on the experience in the competition last year, it is analyzed that the humanoid goalkeeper had some problems. The robot might not get stand up properly after falling and it could not return back to goal line after being picked-up. Furthermore, the goalposts are wider than before so the humanoid goalkeeper should be able to positioning itself to adjust to ball location.
This article discusses the humanoid goalkeeper algorithm analysis using decision tree [5] to evaluate attributes perceived by robot sensors. Each attribute has entropy to represent its
uncertainty and then it is used to calculate information gain. The data are compared based on their entropy and information gained [2] to each others. The hypothesis is trying to use as least number of data as possible to achieve improved performance in the robot soccer competition.
This article begins with introduction and background prob-lems in Section 1. The humanoid goalkeeper architecture is explained in Section 2. The result and analysis of humanoid goalkeeper algorithm is presented in Section 3. At last, Section 4 concludes the result.
II. HUMANOIDROBOTSOCCERGOALKEEPER The humanoid robot soccer goalkeeper consists of two main parts, i.e. the robotic control system and the goalkeeper algorithm which implemented in software system.
A. Robot Soccer Goalkeeper Architecture
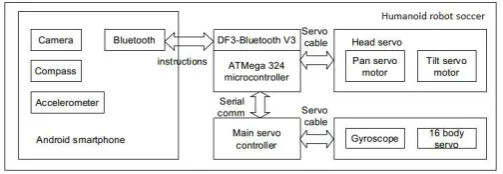
The robotic control system is made of three main com-ponents, as shown in Fig. 1., i.e. a smartphone as the main processor, a main servo controller, and an ATMega324 system. The ATMega324 system does not only manage head servo pan and tilt, but also controls main servo to provide robotic motions [4]. Both smartphone and ATMega324 system are responsible to create robotic motions. The input images captured and processed by smartphone. The result is sent as data packets to microcontroller system via bluetooth to command robotic actuators to move. The command composed of id servo motor address to make robotic motions. It is implemented using pulse width modulation (PWM) to control servo motors.
Robotic actuator control is implemented in the main servo controller to set robotic motions. It is applied to servo motors to make the robot able to walk, split, and kick. In short, all the robotic motions are controlled from the main servo controller.
1) Robotic Construction: The biolod premium robot kit is the oldest robot in the team. It moves slower than other robots. Hence it is modified with alumunium, plastic, and acrylic addition to keep robotic body steady and light, as shown in Fig. 2. This humanoid goalkeeper is made of 18 servo motors, with details 5 servos for each foot, 3 servos for each hand, and 2 for the head. In addition, there is a smartphone put in the back of robot body, functioned as the main controller. Eventually, the robotic dimension becomes a bit higher and heavier than before. The robotic dimension when it is laid on the ground is 0.2 m x 0.1 m x 0.44 m (length x width x height), and the total weight of the robotic is 2.2 kg.
2) Robotic Vision: The camera of smartphone Sony Xperia Mini ST15i with Android OS is chosen to provide vision for the humanoid goalkeeper because of its light weight. The camera takes pictures in YUV colorspace that performs well compared to RGBA colorspace. Whenever the light intensity is lower, the detection performance in both colorspaces are degraded, and in RGBA colorspace the detection accuraccy also decreases. The color segmentation, using thresholding, is used to separate orange ball, white penalty spot, and other environment colors. The result is a binary image with values 0 for black areas and values 1 for white ones. After that, the center-of-gravity of a binary image can be calculated [1].
B. Goalkeeper Algorithm
The goalkeeper algorithm is modified to provide more capability. In last year competition two modes were used, i.e. penalty mode and counter mode. To accommodate new compe-tition rules, two additional modes are included, i.e. ready mode and return mode, besides penalty mode and counter mode are renamed to blocking mode and standby mode respectively.
1) Blocking mode: The humanoid goalkeeper entering blocking mode whenever ball is located within 0.8 m distance area from goal line. The robot locks ball position, if there is a incoming shot it will try to anticipate. Whenever ball comes closer within 0.4 m distance area, the robot will try to come to ball. Then the robot sampling the ball distance and swing its hand to clear ball away from the penalty area.
2) Standby mode: Whenever ball is located outside the penalty area, more than 0.8 m distance area from goal line, the humanoid goalkeeper entering standby mode. The robot estimates ball position, whether it is located in the left side or in the right side of goal. Then the robot will try to move aside in order to narrow the shot angle of opponent robots.
3) Ready mode: In ready mode, the humanoid goalkeeper goes back to the midst of the goal line after receiving instruc-tion from ally robots which informed that ball is located within opponent area near them. The reference used is the penalty spot right in front of goal.
4) Return mode: Similar to ready mode, the humanoid goalkeeper returns back to the midst of the goal line from side line in the center of field after being picked-up.
Using modified algorithm with data sampling and safer method explained in four modes, the humanoid goalkeeper is able to clear ball away from penalty area effectively. At first, the robot will receive an instruction to go back to the midst of goal line from ally robots, if ball is located in opponent
Fig. 2: Humanoid goalkeeper
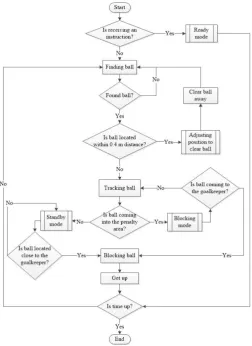
Fig. 3: The humanoid goalkeeper algorithm
III. RESULT ANDANALYSIS
Testing phase is conducted to evaluate each mode and to ensure the humanoid goalkeeper is ready to participate in the robot soccer competition. Trial and error method is used to prepare robot. Therefore, testing phase produces many sample data in laboratory experiments. However, the situation in testing phase can be quite different from the real competition. To anticipate environment change, it is suggested to implement a learning algorithm in robotic software system. As a learning by observation method, decision tree can be used to evaluate humanoid goalkeeper algorithm using entropy and information gained of attributes perceived by robot sensors.
The majority of green grass in the field make it difficult to separate between empty area and crowded area with other robots. Furthermore, there are motion and hardware limitations that cause the humanoid goalkeeper can not clear ball away quickly. In consequence, the priority is trying to clear ball away from penalty area as soon as possible. However, it should be noticed that the humanoid goalkeeper is unable to locate ball behind its back.
A. Blocking mode
In blocking mode the humanoid goalkeeper is not respond-ing to any motion besides focusrespond-ing ball and tryrespond-ing to block incoming shot by falling itself into incoming ball direction. Ball is simulated to be located in different positions and distances from goal for testing robotic behaviour to initiate blocking mode.
This mode is successfully executed if the robotic is able to block and to clear ball away from penalty area. Table I presents the summary of blocking mode testing. It can be seen that the humanoid goalkeeper is not only able to block all incoming shots from within 0.4 – 0.8 m distance, but also to clear ball away from penalty area whenever ball is located within 0.2 – 0.38 m distance. However, it should be noticed that the time taken to clear ball away from penalty area is still too long. That is caused by the servo motors are unable to create responsive robotic motions for the humanoid goalkeeper.
B. Standby mode
Whenever standby mode is executed, the humanoid goal-keeper is able to adjust its position to ball direction and to anticipate incoming shots. Table II presents the summary of standby mode testing.
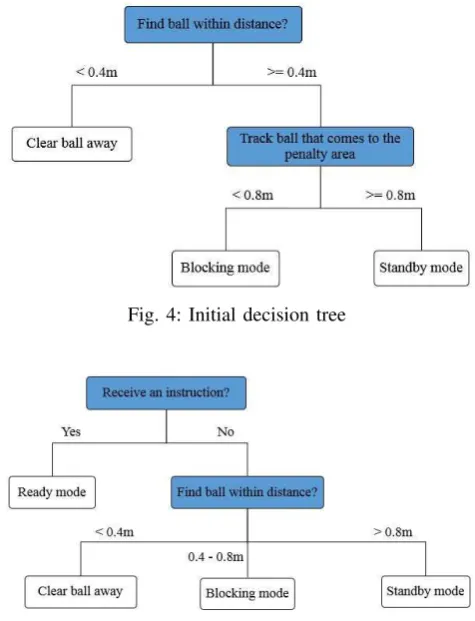
An initial decision tree to accommodate both blocking mode and standby mode is displayed in Fig. 4. From 30 experiments, the number of times the humanoid goalkeeper can clear ball away and can track ball that comes to penalty area are 7 and 23 respectively. Then 20 samples come to blocking mode, while only 3 samples come to standby mode where all of them are negatives (n). From 20 samples in blocking mode, 12 samples are positives (p) and 8 samples are negatives (n). In information theory, entropy is defined as the information conveyed by an attribute depends on its probability and can be measured in bits. Using those 30 number of experiments, the entropy (I), the remainder (Rem), and the information gain (IG) for each attribute are calculated [2], [3] as follow:
I(ball distance) =I( p
Since the information gain of attribute tracking ball coming into penalty area is less than the information gain of attribute ball distance, then the attribute ball distance is moved to be the root of decision tree and the attribute tracking ball into penalty area can be removed. The similar calculation is also performed to other decision trees to evaluate their attributes.
TABLE I: Blocking and clearing ball test result
Ball distance
from robotic (m) 0.2–0.38 0.4–0.8 0.82–0.84
Number of trial 7 20 3
Succesfull blocking 1 20 2
Average time (s) 0.49 0.39 0.4 Succesfull clearing 7 12 2 Average time (s) 47 63.41 63.57
TABLE II: Standby test result
Ball distance
from robotic (m) 0.7–0.78 0.8–1.25
Number of trial 4 26 Succesfull self-positioning 0 26 Average time (s) - 24.81 Succesfull blocking 4 26 Average time (s) 0.4 0.5
In addition, decision tree analysis resulted that the instruction received from inter-robots communication regarding ball lo-cated within opponent area can be moved to be the root of the modified decision tree, as shown in Fig. 5.
C. Ready mode
Ready mode is executed successfully whenever the hu-manoid goalkeeper is receiving communication signal from ally robot in the field and is able to positioning itself to adjust with ball movement and to block incoming shot. In testing, the deviance distance achieved between 0.2 – 0.78 m, the robot can positioning itself according to the compass and is able to return back to the midst of goal line in 30 times out of 30 experiments, with average time 119.9 s.
D. Return mode
Return mode completed whenever the humanoid goal-keeper is able to return back to the midst of goal line from side line after being picked-up. The robot returned accurately in 25 out of 30 experiments with average time 544 s. Similar to the standby mode, a long time taken by the robot to return to goal line due to the limitations of the servo motor to support the robotic motions.
IV. CONCLUSION
The collaboration of four modes, i.e. blocking mode, standby mode, ready mode, and return mode is successfully applied for humanoid goalkeeper algorithm. In blocking mode, updated algorithm to clear ball away from penalty area result almost 100% compared to 75% from old algorithm, whenever ball is within 0.4 m distance area. The robot is able to positioning itself to adjust ball movement in ready mode. In addition, it is concluded that inter-robots communication is the key to decide the robot mode executed.
Decision tree analysis can not be completely applied to whole goalkeeper algorithm because there are several outsider factors needed and less number of attributes to be analysed further. However, the analysis is able to shorten response time
Fig. 4: Initial decision tree
Fig. 5: Modified decision tree
by eliminating unnecessary attributes. Moreover, the decision tree analysis provides a framework to optimize robotics motion for more sensors attached to the robot in the future.
It is also suggested for the humanoid goalkeeper to renew its hardware by replacing the servos with the sophisticated ones. Furthermore, to optimize robotic motions it is necessary to implement advanced algorithm such as inverse kinematic, cut motion, or mirror motion algorithm.
ACKNOWLEDGMENT
The authors would like to thank the Robotic Research Centre (R2C) in Satya Wacana Christian University, Salatiga.
REFERENCES
[1] R.D. Airlangga, S. Nugroho, and B.W. Yohanes, Optimizing Ball Detec-tion Algorithm using Center of Gravity method and Servo Pan and Tilt Controller for Humanoid Soccer Robotic based on Android.Proceeding in 1st Engineering International Conference, UNNES Conservation. pp. II-142 – II-146, Semarang, January, 2013.
[2] C.E. Shannon, A Mathematical Theory of Communication, Reprinted with corrections fromThe Bell System Technical JournalVol. 27, pp. 379-423, 623-656, July, October, 1948.
[3] J.R. Stuart and N. Peter,Artificial Intelligence A Modern Approach, Third Edition, Prentice Hall, 2010.
[4] A.T. Sutrisno, et al., Smartphone berbasis Android sebagai Kontrol Utama Robot Humanoid Soccer. The 2nd Indonesian Symposium on Robot Soccer Competition. Vol. 2, pp. 54, Yogyakarta, 2014.