BAB IV
HASIL PENGUJIAN DAN ANALISIS
Pada bab ini akan dibahas tentang pengujian alat dan analisis mengapa alat dapat bekerja seperti yang sudah diujikan. Pengujian dan analisa sengaja dilakukan berulang kali agar mendapatkan hasil yang maksimal. Pengujian yang dilakukan adalah pengujian terhadap sudut yang dihasilkan ketika perintah diberikan.
Pengujian dibagi menjadi 3 bagian, yaitu pengujian terhadap Aplikasi Avrobject, pengujian terhadap modul Avrobject dan pengujian stringcode yang diberikan secara beruntun dari Aplikasi Avrobject. Setelah dibuat tabel hasil percobaan diberikan juga hasil analisa bagaimana hingga bisa mendapatkan hasil seperti demikian. Setiap pengujian mempunyai ralat busur sebesar 0,1o.
4.1 Pengujian Terhadap Aplikasi Avrobject
Pengujian ini dilakukan dengan hanya memberikan satu buah perintah pada motor yang ingin digerakkan, dengan absis derajat awal adalah 0o. Jadi akan terdapat dua obyek DragObject pada pada ScriptLayout, yaitu motor yang ingin digerakkan dan perintah yang ingin dikerjakan beserta parameternya.
Tabel 4.1. Tabel Pengujian Terhadap Aplikasi Avrobject (1)
2 Turn Right 10 10 100%
Berdasarkan tabel pengujian 4.1 didapatkan bahwa perintah Turn Right berhasil memenuhi spesifikasi 100% yaitu memutar panah searah jarum jam sebanyak parameter yang diberikan. Perintah Turn Left juga berhasil memenuhi spesifikasi 100% yaitu memutar panah berlawanan arah jarum sebanyak parameter yang diberikan. Perintah ini dapat berhasil karena aplikasi dan algoritma yang diberikan untuk menggerakkan animasi sudah berfungsi sebagaimana mestinya.
Tabel 4.2. Tabel Pengujian Terhadap Aplikasi Avrobject (2)
1 Turn Degree -180 180 o 100%
algoritma yang diberikan untuk menggerakkan animasi sudah berfungsi sebagaimana mestinya.
Pada Squeak sendiri telah dibuat method untuk mengarahkan pandangan / heading obyek, yaitu dengan menggunakan method heading. Method heading menghasilkan derajat yang memiliki tipe data desimal / float. Oleh sebab itu ketika ingin menggunakan nilai heading dalam nilai bilangan bulat, telah dibuat juga method yang dapat mengambil nilai integer dari heading. Seperti pada method turnTo: pada class Arrow dipakai method asInteger untuk mengambil nilai integer dari hasil heading.
anInteger := (degree-((360-(self heading))\\360)) asInteger.
4.2 Pengujian Terhadap Modul Avrobject
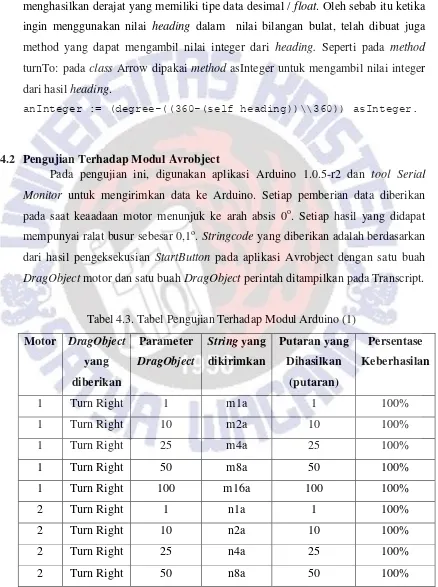
Pada pengujian ini, digunakan aplikasi Arduino 1.0.5-r2 dan tool Serial Monitor untuk mengirimkan data ke Arduino. Setiap pemberian data diberikan pada saat keaadaan motor menunjuk ke arah absis 0o. Setiap hasil yang didapat mempunyai ralat busur sebesar 0,1o. Stringcode yang diberikan adalah berdasarkan dari hasil pengeksekusian StartButton pada aplikasi Avrobject dengan satu buah DragObject motor dan satu buah DragObject perintah ditampilkan pada Transcript.
Tabel 4.3. Tabel Pengujian Terhadap Modul Arduino (1)
2 Turn Right 100 n16a 100 100%
Berdasarkan tabel pengujian 4.3 didapatkan bahwa perintah Turn Right berhasil memenuhi spesifikasi 100% yaitu memutar motor searah jarum jam sebanyak parameter yang diberikan. Perintah Turn Left juga berhasil memenuhi spesifikasi 100% yaitu memutar motor berlawanan arah jarum jam sebanyak
parameter yang diberikan. Ini dapat terjadi karena algoritma yang ditanamkan dalam Arduino untuk menggerakkan motor sudah berfungsi sebagaimana mestinya. Fungsi yang diberikan untuk memutar motor stepper 2BYJ48 sebanyak 360o( 1
putaran )yaitu melakukan perubahan bit 4076 kali berhasil 100%.
Tabel 4.4. Tabel Pengujian Terhadap Modul Arduino (2)
1 Turn Degree -180 m-180c 180 o 100%
Algoritma yang ditanamkan sangat bergantung pada nilai perulangan yang memanggil fungsi void coClockwise(). Dalam fungsi void turnDegrees() terdapat nilai aDegree yang sangat mempengaruhi derajat yang dihasilkan saat melakukan perubahan bit. Nilai aDegree diperoleh 1,417 dari hasil riset dan percobaan yang dilakukan berulang kali, yaitu jika ingin memutar motor 1o perlu diperlukan perubahan bit sebanyak 8 x 1,417 perubahan bit.
4.3 Pengujian dengan memberikan Kode Beruntun
Pengujian ini dilakukan dengan membuat script pada ScriptLayout dengan menempatkan beberapa DragObject sehingga saat obyek StartButton ditekan akan dihasilkan sebuah stringcode. Stringcode ini langsung dikirimkan ke Arduino, dibaca oleh Arduino dan Arduino mengerjakan tugas berdasarkan stringcode tersebut. Pada bagian ini setiap stringcode yang diberikan akan dijelaskan bagaimana keadaan Animasi motor pada aplikasi Avrobject dan bagaimana pergerakan motor asli ketika tombol “DownloadButton” ditekan.
4.3.1Membuat Wiper Atas dan Wiper Bawah
Stringcode yang dikirimkan adalah [1x1em30dg2em210dg10fm120c-120c1hg] untuk membuat wiper atas dan [2x1em30dg2em210dg10fm120c-120c1hg] untuk membuat wiper bawah. Program pertama kali akan membaca nilai vaiabel x, kemudian dengan nilai variabel x dibandingkan percabangan yang akan dilakukan. Jika nilai x bernilai 1, panah motor 1 akan menuju ke posisi 30o dan jika bernilai 2 panah akan menuju ke posisi 210o. Kemudian program akan menjalankan script yang berada pada blok perulangan yaitu wiper yang bergerak 120o
berlawanan arah jarum jam, kemudian bergerak 120o searah jarum jam dan berhenti satu detik. Blok perulangan dilakukan sebanyak sepuluh kali kemudian wiper
kembali berhenti pada posisi awal 30o atau 210o.
Gambar 4.1. ScriptLayout Percobaan kode beruntun (1)
4.3.2Jam Analog
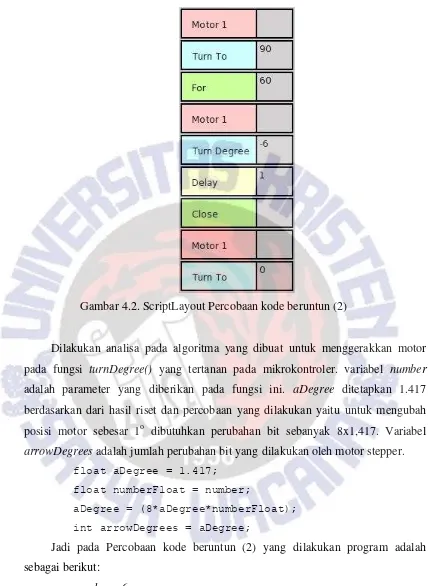
Gambar 4.2. ScriptLayout Percobaan kode beruntun (2)
Dilakukan analisa pada algoritma yang dibuat untuk menggerakkan motor pada fungsi turnDegree() yang tertanan pada mikrokontroler. variabel number adalah parameter yang diberikan pada fungsi ini. aDegree ditetapkan 1.417 berdasarkan dari hasil riset dan percobaan yang dilakukan yaitu untuk mengubah posisi motor sebesar 1o dibutuhkan perubahan bit sebanyak 8x1,417. Variabel arrowDegrees adalah jumlah perubahan bit yang dilakukan oleh motor stepper.
float aDegree = 1.417; float numberFloat = number;
aDegree = (8*aDegree*numberFloat); int arrowDegrees = aDegree;
Jadi pada Percobaan kode beruntun (2) yang dilakukan program adalah sebagai berikut:
number = 6
Untuk menjalankan jam analog selama satu menit diperlukan 60 kali perulangan perubahan bit sebanyak 68 kali, yaitu menjalankan motor 6o sebanyak 60 kali. Jadi jumlah step yang dilakukan pada perintah ini adalah
Jumlah step = 68 x 60 = 4080 step
Sedangkan untuk memutar motor sebanyak 360o hanya dibutuhkan perubahan step sebanyak 4076 kali. Sebab itu dianalisa bahwa setiap menit atau setiap pemberian perintah ini akan mengalami kesalahan perubahan step sebanyak 4 step atau 0,352o. Terlihat bahwa dapat dibuat jam analog yang berhasil bekerja 99,9%, tetapi pengujian perintah perulangan For berhasil 100% yaitu menjalankan perintah dalam blok perulangan sebanyak parameter yang diberikan.
Persentase keberhasilan = � �ℎ � – � �
� �ℎ � x 100%
= 4076 − 4
4076 x 100% = 99,9 %
Pada awal pengerjaan ada bug pada program dalam mikrokontroler, yaitu jika
modul bekerja mulai dari 0o dalam melakukan perintah ini, motor hanya akan bergerak 5o di setiap stepnya. Tetapi setelah dilakukan pencarian bug, diketahui bahwa perlunya menentukan bit awal yang dikirim pada driver motor. Hal ini dikarenakan posisi motor awal adalah tidak pasti pada saat bit 0000. Pemberian nilai awal ini bergantung pada nilai intMotor yang diberikan. Dari hasil percobaan ditetapkan dari awal intMotor bernilai 6, sebab pada saat awal motor dijalankan dia berada pada bit 0011.
4.4 Hasil dan Analisa Kuisioner Pembelajaran Mikrokontroler
Tabel 4.5. Jawaban siswa-siswi terhadap kuisioner yang diberikan
Dari hasil kuisioner khususnya pertanyaan nomor 5 didapatkan bahwa 85,7% siswa mengatakan pembelajaran pemrograman mikrokontroler dengan metode Flowcode lebih mudah dibandingkan dengan metode Basic.
Persentase Jawaban Ya = � � �
� �� � x 100% =
6
7 x 100% = 85,7%
Setelah belajar sekilas mengenai pemrograman dengan metode Flowcode, pada pertanyaan nomor 9, 7 dari 7 orang siswa menyatakan muncul ketertarikan untuk lebih mendalami tentang pemrograman mikrokontroler dengan metode