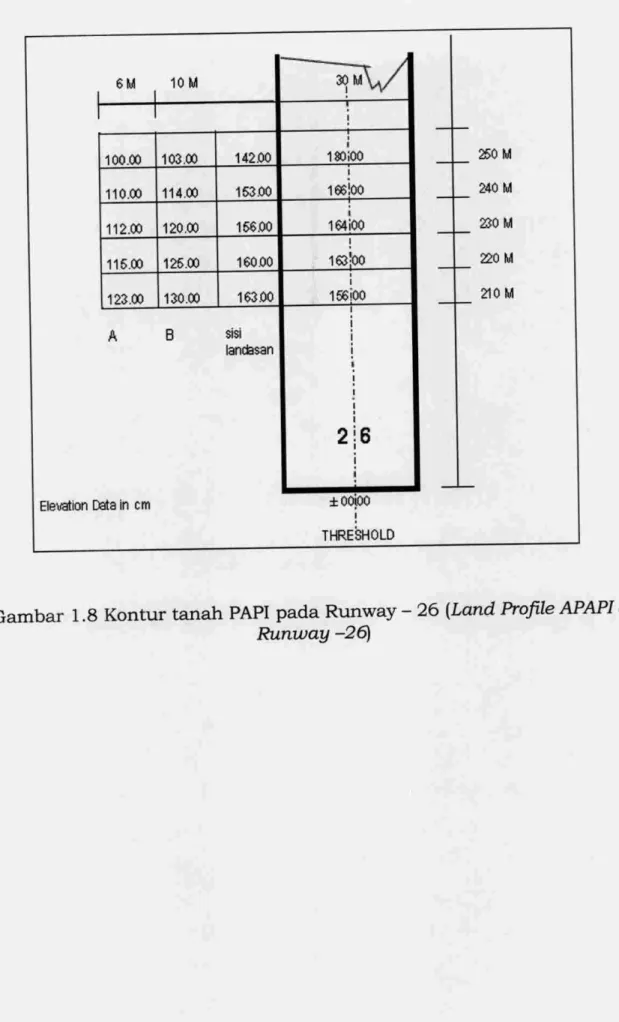
6M 10M
30m\^/
100.00 103.00 142.00 180i00 i 110.00 114.00 153.00166100
112.00 120.00156.00
164i00
115.00125.00
160.00 163-00 123.00130.00
163.00156100
A
B
sisi landasan2|6
Elevation Data in cm
±00i00
THRESHOLD
250 M
240 M 230 M 220 M210M
Gambar 1.8 Kontur tanah PAPI pada Runway - 26 (Land Profile APAPI at
Runway -26)
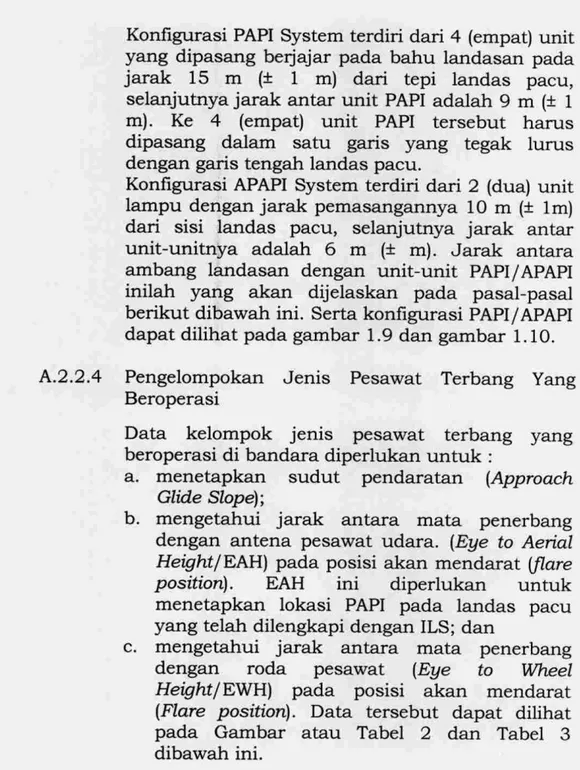
A.2.2.3
Konfigurasi PAPI/ APAPI
Konfigurasi PAPI System terdiri dari 4 (empat) unit
yang dipasang berjajar pada bahu landasan pada
jarak 15 m (±
1 m) dari tepi landas pacu,
selanjutnya jarak antar unit PAPI adalah 9 m (± 1
m).
Ke
4
(empat)
unit
PAPI
tersebut
harus
dipasang dalam satu garis yang tegak lurus
dengan garis tengah landas pacu.
Konfigurasi APAPI System terdiri dari 2 (dua) unit
lampu dengan jarak pemasangannya 10 m (± lm)
dari sisi landas pacu, selanjutnya jarak antar
unit-unitnya adalah 6 m (± m). Jarak antara
ambang landasan dengan unit-unit PAPI/APAPI
inilah yang akan dijelaskan pada pasal-pasal
berikut dibawah ini. Serta konfigurasi PAPI/APAPI
dapat dilihat pada gambar 1.9 dan gambar 1.10.
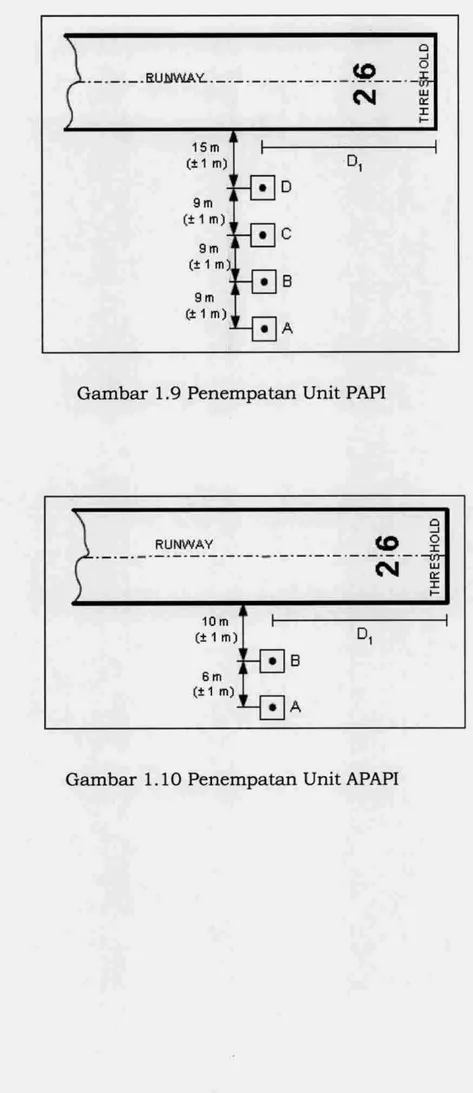
A.2.2.4
Pengelompokan
Jenis
Beroperasi
Pesawat
Terbang
Yang
Data
kelompok
jenis
pesawat
terbang
yang
beroperasi di bandara diperlukan untuk :
a.
menetapkan
sudut
pendaratan
(Approach
Glide Slope);
b. mengetahui jarak antara
mata
penerbang
dengan antena pesawat udara. (Eye to Aerial
Height/EAH) pada posisi akan mendarat (flare
position).
EAH
ini
diperlukan
untuk
menetapkan lokasi PAPI pada landas pacu
yang telah dilengkapi dengan ILS; dan
c.
mengetahui jarak
antara
mata
penerbang
dengan
roda
pesawat
(Eye
to
Wheel
Height/EWH)
pada
posisi
akan
mendarat
(Flare position). Data tersebut dapat dilihat
pada
Gambar
atau
Tabel
2
dan
Tabel
3
dibawah ini.
Tabel 2. Jarak mata penerbang dengan antena dan dengan roda pesawat
udara. (Give the eye to aerial and to wheels heights, for various aeroplanes in
approach altitude)
m F.YF -1 -2 -3 HS -4 BA > 74B<1_H.S
-5c
*
VCB <1 R7"* tn n SE -6 -7 -8 -9 R7?<,
DC 5 <
» 210 <• DC 9R70<
1 <» 1
• DC 8 HS 121 -10 -11 -12LlOn
<
' IDC 10 >A300WHF.F.I S
- 13 B747Gambar 1.9 Penempatan Unit PAPI
[
RUNWAY
<o
o _ j o I LU X »—\
CM
10m(±1m)
16m
J
(±1 m),
Mi
JM
• •B
A
°i
Tabel
3.
Jarak
vertikal
antara
titik
kritis
pesawat
udara
pada
pitch
attitude
(Approach
pada
VREF)
(ILS)
Vertical
distance
between
critical
points
on
aircraft
At
maximum
pitch
attitude
(Approach
at
VREF)
(ILS)
Aircraft model2.5
degree
glide
slope
3
degree
glide
slope
Pitch att(deg)Flap
setting
Gross
weight
(Kg)
Eye
path
to ILS beamfleet)
H2
ILS beam to wheelpath
fleet)
HEye
path
to wheelpath
fleet)
HI ILSantenna above wheels fleet)
H3
Pilot's
eye
above wheelsfleet)
H4
Pitch attitude(degree)
Eye
path
to ILS beamfleet)
H2
ELS be am towheel
path
(feet)HEye
path
to wheel pathfleet)
HI
ILSantenna above wheels fleet)
H3
Pilot's
eye
above wheelsfleet)
H4
A300-B2,B4
5.3 25 130000 9.1 22.9 32.0 19 6 28.7 49 9.1 229 32.0 189 28.1 A300-600 5.9 40/30 139 000 9.1 23.4 32.5 20.1 29.2 5.4 9.1 23.4 32.6 195 28.6 A310-300 40/30 118000 9.1 20.7 29.8 17 9 27.0 5j0 9.1 20J8 29.9 17.4 26 5 A320 5.0 6.0 17.3 23.3 15 0 21.2 5J0 6.0 17B 23.8 15J0 212 B7 02-120/220 1.9 50 60 782 1.0 19.4 20.4 16 5 17.7 1.4 1.0 19.4 20.4 159 17 2 B707-120B 3.0 40 64 865 1.0 20.6 21.6 17 J8 18.9 25 1.0 20j6 21.6 172 18.4 B707-138 3.0 40 58 968 1.0 20.1 20.1 17 5 18.6 25 1.0 20.1 21.1 170 18 2 B707-138B 3.0 40 63 050 1.0 20.1 20.1 17 5 18.6 25 1.0 20.1 21.1 17J0 18 2 B7 07-320/420 1.8 50 73 030 1.0 19.9 21.0 16 3 18.0 13 1.0 199 21.0 16.1 17.4 B707-320B/C(ADV)
3.9 40 112039 0.9 22.5 23.4 19.4 20.5 3.4 0.9 226 23.5 189 20 JO B707-320B 2.6 1.0 20.9 21.9 17 8 18.9 2.1 1.0 209 21.9 17.1 18.4Aircraft model B7 47-100/200
(WING
GEAR)B7
47-100/200
(BODY
GEAR) B747SP(WING
GEAR)
B747SP(BODY
GEAR)
B747-300(WING
GEAR) B757-200 B767-200 B767-200ER B767-300 B767-300ER DC-8-51/5 DC-8-61/7Pitch att
(deg)Flap
setting
Gross
weight
(Kg)
38 556 5.05 25 170 100 5.05 25 170 100 5.2 30 156492 5.2 30 156 492 5.5 25 190 512 5.9 25 70 762 5.25 25 102 786 4.6 25 107 503 3.9 IS 109 771 2.6 35 108 864 -0.7 35 108 864Eye
path
to ILS beamfleet)
H2
20.4 20.4 20.4 20.4 20.9 6.1 6.6 6.7 6.8 6.5 6.92.5
degree
glide
slope
Eye
path
to wheelpath
fleet)
HI ILS beam to wheelpath
fleet)
H 24.1 24.1 21.8 21.9 24.4 22.4 23.5 24.0 23.0 17.0 13.6 44.6 44.5 42.2 42.3 45.3 28.5 30.2 30.7 29.7 23.5 20.6 ILSantenna above wheels fleet)
H3 20 j6 20 JO 18 9 18/5 20 J8 19 JO 20.4 20 3 19 3 13 J8 9.6 Pilot's eye
above wheels
fleet)
H4
40.9 40.3 39.3 38.9 41.6 25.3 27.2 27.2 26.3 20.7 16.8 Pitch attitude(degree)
4/5 4j6 4.7 4.7 5J0 5.4 4.75 4.1 3.4 2j6 -0.7Eye
path
to ILS beamfleet)
H2
20.4 20.4 20.4 20.4 21.0 6.1 6.6 6.7 6.8 6.5 6.93
degree
glide
slope
Eye
path
to wheelpath
fleet)
HI
ILS be am towheel
path
(feet)H 242 242 21J8 21924.4 22.4 23.5 24D 23J0 17J0 13/5
44.7 44.6 42.2 42.3 45.3 28.5 30.2 30.7 29.7 23.5 20.6
ILS
antenna above wheels
fleet)
H3
199 193 183 17J8 20.1 18.4 19.7 19/5 18/5 132Pilot's
eye
above wheelsfleet)
H4
40 2 39/5 38/5 38.1 40 9 24.7 26/5 26 5 25 j6 20.1 16.1ID O •a (U
Si
<D (D e n § ft _1J«K
»
to"II
K <D o •D•a
<D•S
g •* w
Hi
^ffi
d 3&**
*08
f* <o CO c i m co •Cf <*» '"I «"» <* "O o-, «Q — C* "' O C3 W"t <o "> •o«> jog
• o Ok PI • "1 v> "O <o M <o COAircraft model Pxkker 100 MD-30 MD-87 Pitch att
(deg)FTap
setting
Gross
weight
(Kg)
26.5 15 075 4.5 25 36 000 6.5 28 58 968 6.6 28 58 968Eye
path
to ILS beamfleet)
H2
2.7 5.9 5.52.5
degree
glide
slope
Eye
path
to wheelpath
fleet)
HI ILS beam to wheelpath
fleet)
H 16.4 20.3 18.8 19.1 26.1 24.3 ILSantenna above wheels fleet)
H3 14 JO 16 9 15 9 Pilot's eye
above wheels
fleet)
H4
16.9 23.1 21.7 Pitch attitude(degree)
4J0 65 «5j6Eye
path
to ILS beam.fleet)
H2
2.7 5.9 5.53
degree
glide
slope
Eye
path
to wheelpath
fleet)
HI
ILS be am towheel path
(feet)H
16.4 203188
19.1 26.1 24.3
ILS
antenna above wheels fleet)
H3 13.5 163 153 Pilot's eye above wheels
fleet)
H4
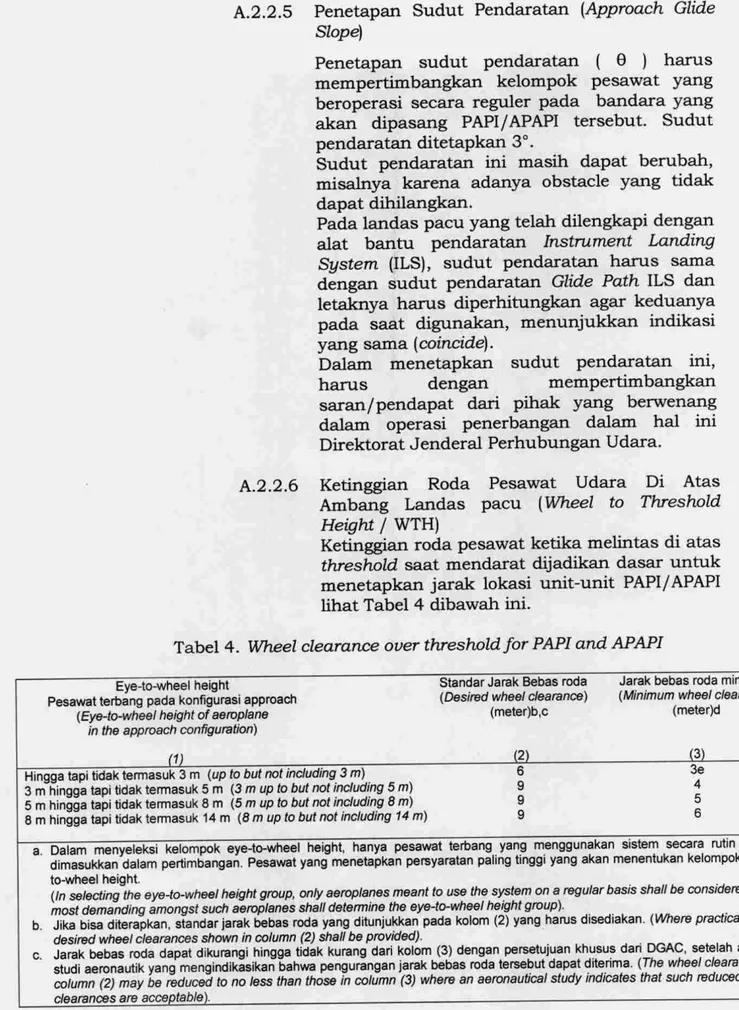
16 5 22/5 212A.2.2.5
Penetapan Sudut Pendaratan (Approach Glide
Slope)
Penetapan sudut pendaratan
( 0 ) harus
mempertimbangkan kelompok pesawat yang
beroperasi secara reguler pada bandara yang
akan dipasang PAPI/APAPI tersebut. Sudut
pendaratan ditetapkan 3°.
Sudut pendaratan ini masih dapat berubah,
misalnya karena adanya obstacle yang tidak
dapat dihilangkan.
Pada landas pacu yang telah dilengkapi dengan
alat bantu
pendaratan Instrument Landing
System (ILS), sudut pendaratan harus sama
dengan sudut pendaratan Glide Path ILS dan
letaknya harus diperhitungkan agar keduanya
pada saat digunakan, menunjukkan indikasi
yang sama (coincide).
Dalam
menetapkan
sudut
pendaratan
ini,
harus
dengan
mempertimbangkan
saran/pendapat dari pihak yang berwenang
dalam operasi penerbangan dalam hal ini
Direktorat Jenderal Perhubungan Udara.
A.2.2.6
Ketinggian
Roda
Pesawat
Udara
Di
Atas
Ambang Landas pacu (Wheel to Threshold
Height / WTH)
Ketinggian roda pesawat ketika melintas di atas
threshold saat mendarat dijadikan dasar untuk
menetapkan jarak lokasi unit-unit PAPI/APAPI
lihat Tabel 4 dibawah ini.
Tabel 4. Wheel clearance over threshold for PAPI and APAPI
Eye-to-wheel height
Pesawat terbang pada konfigurasi approach
(Eye-to-wheelheightof aeroplane
in the approach configuration)
(11
Hingga tapi tidak termasuk 3 m {up to but not including 3 m)
3 mhingga tapi tidak termasuk 5 m (3mup to but not including 5 m)
5 m hingga tapi tidak termasuk 8 m (5 m up tobut not including 8 m)
8 m hingga tapi tidak termasuk 14 m (8 m up to but not including 14 m)
Standar Jarak Bebas roda
{Desired wheel clearance)
(meter)b,c
J2L
Jarak bebas roda minimum