TINJAUAN ALINEMEN VERTIKAL PADA JALAN LINGKAR NAGREG
Oleh: Samun Haris & Yuanita
Abstrak
Sejak dioperasikannya Jalan Lingkar Nagreg di Kabupaten Bandung, acapkali ditemukan adanya permasalahan pada jalan tersebut terutama pada geometriknya yang berkaitan dengan alinemen vertikal, antara lain terjadi peristiwa insidentil kendaraan angkutan berat yang tidak dapat mendaki dengan sempurna. Tujuan penelitian ini untuk mengevaluasi tingkat kenyamanan dari ruas Jalan Lingkar Nagreg tersebut, khususnya di lokasi rawan kejadian yaitu pada Sta. 3+065 dan di Sta. 4+012, berpedoman kepada Tata Cara Perencanaan Geometrik Jalan Antar Kota Nomor 38/T/BM1997. Hasil evaluasi menyimpulkan ditemukan permasalahan yang berpotensi akan sering timbul sehubungan kelandaian jalan yang berada pada kisaran 10% yang secara faktual dipandang belum dapat mengakomodasi secara optimal ketentuan alinemen vertikalnya.
Kata Kunci: Jalan Lingkar Nagreg, Aspek Geometrik, Kelandaian
PENDAHULUAN
Jalan adalah prasarana transportasi darat, memiliki peranan penting dalam melayani distribusi baik orang maupun barang terutama dalam mendukung aktivitas ekonomi. Perjalanan diharapkan dapat terselenggara secara aman, cepat, lancar, dan dengan biaya yang murah yang dapat terjangkau oleh semua lapisan masyarakat. Setiap jalan dengan fungsi tertentu harus dibangun dengan dimensi tertentu untuk mengakomodir jumlah dan beban kendaraan yang akan melaluinya dengan kecepatan tertentu.
Jalan Nagreg merupakan jalan antar kota di lintas tengah Provinsi Jawa Barat yang yang menghubungkan ruas jalan Cileunyi–Nagreg dengan Ruas Jalan Nagreg yang menuju arah ke Kabupaten Garut dan yang menuju arah ke Kabupaten Taikmalaya serta arah tujuan ke daerah Jawa Tengah.. Pembangunan baru Jalan Lingkar Nagreg di Kabupaten Bandung
bertujuan untuk memberikan kelancaran, keamanan, dan kenyamanan bagi para pengguna jalan serta diharapkan dapat meningkatkan aktivitas perekonomian masyarakat. Berdasarkan catatan kejadian di lapangan, beberapa permasalahan acapkali terjadi pada jalan tersebut berkaitan alinemen vertikal sehubungan dengan kelandaian jalan yang ada, khususnya pada Sta 3+065 dan Sta 4+012, sehingga perlu dilakukan langkah evaluasi kesesuaiannya dengan ketentuan normatif dalam Tata Cara Perencanaan Geometrik Jalan Antar Kota Nomor 038/T/BM/1997.
KEPUSTAKAAN
Sumbu Terberat (MST) dalam satuan ton (Ditjen Bina Marga, 1990). Medan jalan diklasifikasikan berdasarkan kondisi sebagian besar kemiringan medan yang diukur tegak lurus garis kontur, sedangkan keseragaman kondisi medan yang
diproyeksikan harus
mempertimbangkan keseragaman kondisi medan menurut rencana trase jalan.
Kendaraan rencana adalah kendaraan yang dimensi dan radius putarnya dipakai sebagai acuan dalam perencanaan geometrik, dikelompokkan ke dalam 3 kategori: (1) kendaraan Kecil, diwakili oleh mobil penumpang; (2) kendaraan Sedang, diwakili oleh truk 3 as tandem atau oleh bus besar 2 as; (3) Kendaraan Besar, diwakili oleh truk-semi-trailer.
Volume Lalu Lintas Harian Rencana (VLHR) adalah prakiraan volume lalu lintas harian pada akhir tahun rencana. Lalu lintas dinyatakan dalam Equivalen Mobil Penumpang (EMP)/hari. Volume Jam Rencana (VJR) adalah prakiraan volume lalu lintas pada jam sibuk tahun rencana lalu lintas, dinyatakan dalam EMP/jam, VJR digunakan untuk menghitung jumlah lajur jalan dan fasilitas lalu lintas lainnya yang diperlukan. Kecepatan rencana kendaraan atau VR pada suatu ruas jalan adalah kecepatan yang dipilih sebagai dasar perencanaan geometrik jalan yang memungkinkan kendaraan- bergerak dengan aman dan nyaman.. VR untuk masing masing fungsi jalan ditetapkan secara normatif. Untuk kondisi medan yang sulit, VR suatu segmen jalan dapat diturunkan dengan syarat bahwa penurunan tersebut tidak lebih dari 20 km/jam.
Keamanan dan kenyamanan pengemudi kendaraan untuk dapat melihat dengan jelas dan menyadari situasinya pada saat mengemudi, sangat tergantung pada jarak yang dapat dilihat dari tempat kedudukannya. Panjang jalan di depan kendaraan yang masih dapat dilihat dengan jelas diukur dari titik kedudukan pengemudi disebut jarak pandang, yaitu suatu jarak yang diperlukan oleh seorang pengemudi pada saat mengemudi sedemikian sehingga jika pengemudi melihat suatu halangan yang membahayakan, pengemudi dapat melakukan sesuatu untuk menghindari bahaya tersebut dengan aman. Berdasarkan kegunaannya jarak pandang dapat dibedakan atas: (a) Jarak pandang henti atau Jh yaitu jarak pandang yang dibutuhkan untuk menghentikan kendaraannya; (b) Jarak pandang mendahului atau Jd yaitu jarak pandang yang dibutuhkan untuk dapat mendahului kendaraan lain yang berada pada lajur jalannya dengan menggunakan lajur arah yang berlawanan.
Jarak pandang henti (Jh) adalah jarak minimum yang diperlukan oleh setiap pengemudi untuk menghentikan kendaraannya dengan aman begitu melihat adanya halangan di depan. Setiap titik di sepanjang jalan harus memenuhi jarak pandang henti. Jarak pandang henti diukur berdasarkan asumsi bahwa tinggi mata pengemudi adalah 105 cm dan tinggi halangan 15 cm diukur dari permukaan jalan.
pengereman (Jhr), adalah jarak yang dibutuhkan untuk menghentikan kendaraan sejak pengemudi menginjak rem sampai kendaraan berhenti. Jarak pandang henti dalam satuan meter, dapat dihitung dengan
rumus: Jh = Jht + Jhr = VR , T +
VR ,
F VR = kecepatan rencana (km/jam); T = waktu tanggap, ditetapkan 2,5 detik; g = percepatan gravitasi, ditetapkan 9,8 m/det2; fp = koefisien gesek memanjang perkerasan jalan aspal, ditetapkan 0,35-0,55. Persamaan dapat disederhanakan menjadi: (a) Untuk
jalan datar: Jh = 0,278 VR T + VR P; (b) Untuk jalan dengan kelandaian
tertentu: Jh = 0,278 VR T + VR
P L; L = landai jalan dalam %.
Jarak pandang mendahului (Jd) adalah jarak yang memungkinkan suatu kendaraan mendahului kendaraan lain di depannya dengan aman sampai kendaraan tersebut kembali ke lajur semula. Jarak pandang mendahului diukur berdasarkan asumsi bahwa tinggi mata pengemudi adalah 105 cm dan tinggi halangan adalah 105 cm. Formulasi jarak pandang ( m): Jd = dl + d2 + d3 + d4
d1 = jarak yang ditempuh selama waktu tanggap (m): 0,278
VR – m .T!";
d2 = jarak yang ditempuh selama mendahului sampai dengan kembali ke lajur semula (m): d2 = 0,278 VR T2; d3 = jarak antara kendaraan yang mendahului dengan kendaraan yang datang dari arah berlawanan setelah proses mendahului selesai (m): d3 = antara 30 – 90; d4 = jarak yang ditempuh oleh kendaraan yang datang
dari arah berlawanan, yang besarnya diambil sama dengan 2/3 d2 (m).
T1= waktu reaksi tanggap (detik): ∞ 2,12 + 0,026 VR; T2= waktu kendaraan berada di jalur lawan (detik): ∞ 6,56 + 0,048 VR; a= percepatan rata-rata (km/jam/detik); ∞ 2,052 + 0,0036 VR; m= perbedaan kecepatan dari kendaraan yang mendahului dan kendaraan yang didahului (biasanya diambil 10 – 15 km/jam).
Alinemen Vertikal
Alinemen vertikal adalah perencanaan elevasi sumbu jalan pada setiap titik yang ditinjau atau berupa profil memanjang. Pada perencanaan alinemen vertikal akan ditemui kelandaian positif yang berupa tanjakan dan kelandaian negatif yang berupa turunan, sehingga kombinasinya berupa lengkung cembung dan lengkung cekung. Di samping kedua lengkung tersebut, ditemui pula kelandaian = 0 atau datar.
Kondisi tersebut dipengaruhi oleh keadaan topografi yang dilalui rute jalan rencana.
rencana dimaksudkan agar kendaraan dapat bergerak terus tanpa kehilangan kecepatan yang berarti. Kelandaian maksimum (Tabel 1) didasarkan pada kecepatan truk yang bermuatan
penuh, mampu bergerak dengan kecepatan tidak kurang dari separuh kecepatan semula tanpa harus menggunakan gigi rendah.
Tabel 1 Kelandaian Maksimum yang Diizinkan (Sumber : Ditjen Bina Marga, 1997)
VR (km/jam) 120 110 100 80 60 50 40 <40
Kelandaian
Maksimum (%) 3 3 4 5 8 9 10 10
Pada jalan yang menggunakan kerb pada tepi perkerasannya, perlu dibuat kelandaian minimum 0,5% untuk keperluan kemiringan saluran samping, karena kemiringan melintang jalan dengan kerb hanya cukup untuk mengalirkan air ke samping.
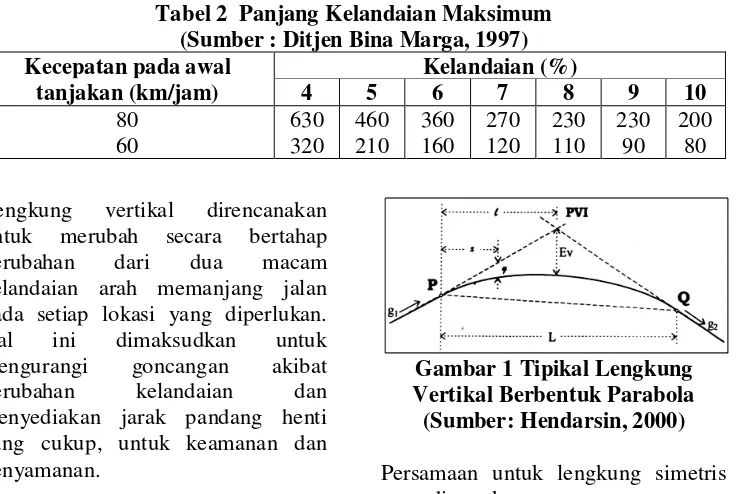
Panjang kritis suatu kelandaian diperlukan sebagai batasan panjang kelandaian maksimum (Tabel 2) agar pengurangan kecepatan kendaraan tidak lebih dari separuh VR. Lama perjalanan pada panjang kritis tidak lebih dari satu menit.
Tabel 2 Panjang Kelandaian Maksimum (Sumber : Ditjen Bina Marga, 1997) Kecepatan pada awal
tanjakan (km/jam)
Kelandaian (%)
4 5 6 7 8 9 10
80 60
630 320
460 210
360 160
270 120
230 110
230 90
200 80
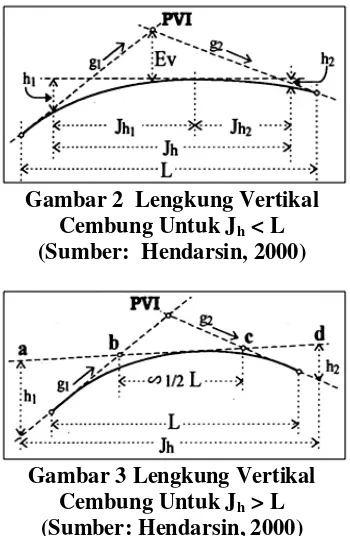
Lengkung vertikal direncanakan untuk merubah secara bertahap perubahan dari dua macam kelandaian arah memanjang jalan pada setiap lokasi yang diperlukan. Hal ini dimaksudkan untuk mengurangi goncangan akibat perubahan kelandaian dan menyediakan jarak pandang henti yang cukup, untuk keamanan dan kenyamanan.
Lengkung vertikal terdiri dari dua jenis yaitu lengkung cembung dan lengkung cekung. Tipikal lengkung vertikal seperti pada Gambar 1.
Gambar 1 Tipikal Lengkung Vertikal Berbentuk Parabola (Sumber: Hendarsin, 2000)
Persamaan untuk lengkung simetris yang digunakan:
x = L . ! !# =
L . ! A
y = L . ! !# =
L . ! A
y = perbedaan elevasi antara titik P dan titik yang ditinjau pada Sta (m);
L= panjang lengkung vertikal parabola, yang merupakan jarak proyeksi dari titik P dan titik Q, (Sta); g1= kelandaian tangen titik P (%); g2= kelandaian tangen titik Q (%); (g1 ± g2) = A = perbedaan aljabar untuk kelandaian (%).
Kelandaian menaik atau pendakian diberi tanda (+), sedangkan kelandaian menurun atau penurunan diberi tanda (−). Ketentuan pendakian atau penurunan ditinjau dari kiri: Ev = A . L%&& Untuk : x= ½ L y= Ev
Lengkung Vertikal Cembung Ketentuan tinggi untuk lengkung cembung sebagaimana Tabel 3.
Tabel 3 Ketentuan Tinggi Untuk Jenis Jarak Pandang (Sumber : Ditjen Bina Marga,
1997)
Untuk Jarak Pandang
h1 (m)
Tinggi Mata
h2 (m)
Tinggi Obyek
Henti (Jh)
Mendahului (Jd)
1,05 1,05
0,15 1,05
a. Panjang L, berdasarkan Jh:
Jh < L, maka : L = 399
J . A h2
Jh > L, maka : L = 2 Jh − A 399
b. Panjang L, berdasarkan Jd:
Jd < L, maka : L = 840
J .
A d2
Jd > L, maka : L = 2 Jd − A 840
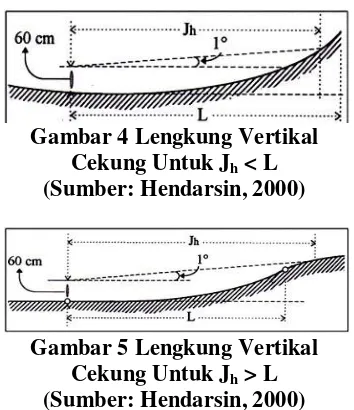
Gambar 2 Lengkung Vertikal Cembung Untuk Jh < L
(Sumber: Hendarsin, 2000)
Gambar 3 Lengkung Vertikal Cembung Untuk Jh > L
(Sumber: Hendarsin, 2000) Panjang lengkung vertikal cembung (L), sebagaimana Gambar 2 dan Gambar 3, yang diperoleh dari rumus berdasarkan Jd pada umunya akan menghasilkan L lebih panjang daripada jika menggunakan rumus berdasarkan Jh. Untuk menghemat biaya L dapat ditentukan dengan rumus berdasarkan Jh dengan konsekuensi kendaraan pada daerah lengkung cembung tidak dapat mendahului kendaraan di depannya.
Lengkung Vertikal Cekung
Gambar 4 Lengkung Vertikal Cekung Untuk Jh < L
(Sumber: Hendarsin, 2000)
Gambar 5 Lengkung Vertikal Cekung Untuk Jh > L
(Sumber: Hendarsin, 2000)
Tinggi lampu besar kendaraan = 0,60 m dan sudut bias = 1º, sehingga diperoleh hubungan praktis:
Jh < L, maka : L =
h 2 h
3,5J 120
A.J
+
Jh > L, maka : L = 2 Jh –
METODE PENELITIAN
Penelitian yang dilakukan adalah bersifat kausal komparatif terhadap data-data yang diperoleh dari Kantor Satuan Kerja Non Vertikal Tertentu Perencanaan Dan Pengawasan Jalan Nasional Provinsi Jawa Barat, yaitu berupa data teknik pendukung geometrik yang menunjukkan keadaan langsung dari ruas Jalur Lingkar Nagreg, dan informasi lisan mengenai kejadian di lokasi terkait dari Kantor Kepolisian Sektor Nagreg. Penelitian ini dilakukan dengan beberapa metode perhitungan geometrik jalan raya berupa alinemen vertikal. Metode evaluasi berpedoman kepada Tata Cara Perencanaan Geometrik Jalan Antar Kota Nomor 38/T/BM/1997
DATA DAN PEMBAHASAN Sta. 3+065 merupakan titik yang berada pada kelandaian sebesar −11,000% dengan mendekati PPV14. Perhitungan PPV14 (Gambar 6) adalah sebagai berikut:
Gambar 6 Lengkung Vertikal PPV14
Data: VR= 40 km/jam; g15= −11,000%; g14= +1,000%
A= g14 – g15 = +1,000% − (−11,000%) = +12,000% (Lv Cembung)
Menghitung Panjang Lengkung Vertikal:
(a) Berdasarkan syarat keluwesan bentuk: L= 0,6 × VR = 0,6 × 40 = 24 m; (b) Berdasarkan syarat drainase: Lv= 40 × A = 40 × 12 = 480 m; (c) Berdasarkan syarat pengurangan
goncangan: Lv= = = 53,333 m; diambil nilai Lv yang efisien= 53,333 m; Ev= =
= 0,800 m; X= × Lv = ×
53,333 = 13,333 m; Y= =
= 0,200 m
Jarak pandang henti
Jh = +
= g14 = 1,0000%
PVI14
g15 = -11,000% PLV14 x
x PTV14 YA
YB PPV14
EV
= '0,278 , 40 , 2,5/ + 0 , &, #&,&1& 2
= 27,8 + 18,527 = 46,327 m; Jh < Lv → 46,327 < 53,333 m.
L = 3,45 66 =
1 , , 7
66 = 64,547 m; L > Lv → 64,547 > 53,333. Tidak aman.
Jarak pandang mendahului Jd = d1 + d2 + d3 + d4;
d1 = 0,278 × T1 × 089: ; <,=!2; ;
d2 = 0,278 × VR × T2; d3 = antara 30 – 100 m; d4 = ⅔ × d2
T1 = 2,12 + (0,026 × VR)
= 2,12 + (0,026 × 40) = 3,16 detik T2 = 6,56 + (0,048 × VR)
= 6,56 + (0,048 × 40) = 8,48 detik A = 2,052 + (0,0036 × VR)
= 2,052 + (0,0036 × 40) = 2,196 detik
m = antara 10 – 15 km/jam, diambil 10 km/jam
d1= 0,278 × T1 × 089: ; <,=!2=
0,278 × 3,16 × 040 : 10 ,16 , ,1 2
= 23,036 m
d2 = 0,278 × VR × T2= 0,278 × 40 × 8,48 = 94,298 m; d3= 30 m; d4= ⅔ × d2 = ⅔ × 94,298 = 62,865 m
Jd= d1 + d2 + d3 + d4= 23,036 + 94,298 + 30 + 62,865 = 210,199 m Jd > Lv → 210,199 > 53,333 m. L = 2Jd x 6 &
3 = (2×210,199) x 6 &
1 = 340,398 m
L > Lv → 340,398 > 53,333. Maka
perlu dipasang rambu dilarang mendahului.
Elevasi Lengkung Vertikal
Elevasi PLV14= elevasi PPV14 + (½ Lv ×g14) = +845,000 + (½ 53,333 × 0,01) =+845,000+ 0,267=+845,267 m
Elevasi YA= elevasi PPV14 + (X ×g14) –YA= +845,000 + (13,333×0,01) – 0,200 = +845,000 + 0,133 – 0,200 = +844,933 m
Elevasi PPV14= Elevasi PPV14 – Ev= +845,000 – 0,800 = +844,200 m
Elevasi YB= elevasi PPV14 − (X ×g15) –YB= +845,000 − (13,333×0,11) – 0,200 = +845,000 – 1,467 – 0,200 = +843,333 m
Elevasi PTV14= elevasi PPV14 − (½ Lv×g15)= +845,000−(½ 53,333× 0,11) = +845,000–2,933=+842,067 m
Stasioning
Sta PPV14= 3+025,000
Sta PLV14= Sta PPV14 − ½ Lv = (3+025,000) − ½ 53,333 = (3+025,000) – 26,667 = 2+998,333 Sta YA = Sta PLV14 + X = (2+998,333) + 13,333 = 3+011,666 Sta PTV14 = Sta PPV14 + ½ Lv = (3+025,000) + ½ 53,333 = (3+025,000) + 26,667 = 3+051,667 Sta YB = Sta PTV14 − X = (3+051,667) – 13,333 = 3+065,000
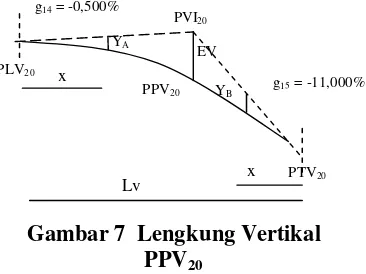
Sta. 4+012 merupakan titik yang berada pada kelandaian sebesar −11,000% dengan mendekati PPV20. Perhitungan PPV20 (Gambar 7) adalah sebagai berikut:
Gambar 7 Lengkung Vertikal PPV20
Lv x PTV20
PPV20 g15 = -11,000% PVI20
EV YA
g14 = -0,500%
PLV20
YB
Data:
VR= 40 km/jam;
g21 = −11,000%; g20 = +0,500% A= g20 – g21
= +0,500% − (−11,000%) = +11,500% (Lv Cembung)
Menghitung panjang Lengkung Vertikal: (a) Berdasarkan syarat keluwesan bentuk: Lv= 0,6 × VR = 0,6 × 40 = 24 m; (b) Berdasarkan syarat drainase: Lv= 40 × A = 40 × 11,5 = 460 m; (c) Berdasarkan syarat
pengurangan goncangan: Lv = ? ,3 & = & ,11,
& = 51,111 m; diambil nilai Lv yang efisien= 51,111 m
Ev= 3,@A %&& =
11, , 1,111
%&& = 0,735 m; X= 1 × Lv = 1 × 51,111 = 12,778 m
Y= 3,B&&,@ A =
11, ,1 ,77%
&&, 1,111 = 0,184 m
Jarak pandang henti
Jh= '0,278 , VR , T/ +
0 ?E
, FG H2= '0,278 , 40 , 2,5/ + 0 , &, #&,&1& 2
= 27,8 + 18,527 = 46,327 m; Lv < Jh → 46,327 < 51,111
L = 3,45 66 =
1 , , 7
66 = 64,547 m; L > Lv → 64,547 > 51,111. Tidak
aman.
Jarak pandang mendahului
Jd= d1 + d2 + d3 + d4; d1= 0,278 × T1
× 089: ; <,=!2; d2 = 0,278 × VR
× T2
d3= antara 30 – 100 m; d4 = ⅔ × d2 T1 = 2,12 + (0,026 × VR)
= 2,12 + (0,026 × 40) = 3,16 detik T2 = 6,56 + (0,048 × VR)
= 6,56 + (0,048 × 40) = 8,48 detik a = 2,052 + (0,0036 × VR)
= 2,052 + (0,0036 × 40) = 2,196 detik
m = antara 10 – 15 km/jam, diambil 10 km/jam
d1= 0,278 × T1 × 089: ; <,=!2=
0,278 × 3,16 × 040 : 10 ,16 , ,1 2
= 23,036 m; d2 = 0,278 × VR × T2= 0,278 × 40 × 8,48 = 94,298 m; d3= 30 m; d4= ⅔ × d2 = ⅔ × 94,298 = 62,865 m
Jd= d1 + d2 + d3 + d4 = 23,036 + 94,298 + 30 + 62,865 = 210,199 m Jd > Lv → 210,199 > 51,111 m. L = 2Jd x 6 &3 = (2×210,199) x 6 &1 = 340,398 m
L > Lv → 340,398 > 51,111. Maka
perlu dipasang rambu dilarang mendahului.
Elevasi Lengkung Vertikal
Elevasi PLV20= elevasi PPV20 + (½ Lv ×g20) = +774,500 + (½ 51,111 × 0,005) = +774,500 + 0,128 = +774,628 m
Elevasi YA= elevasi PPV20 + (X ×g20) –YA= +774,500 + (12,778×0,005) – 0,184 = +774,500 + 0,064 – 0,184 = +774,380 m
Elevasi PPV20= Elevasi PPV20 – Ev= +774,500 – 0,735 = 773,765 m Elevasi YB= elevasi PPV20 − (X ×g21) –YB = +774,500 − (12,778×0,11) – 0,184 = +774,500 – 1,405 – 0,184 = +772,911 m
Elevasi PTV20= elevasi PPV20 − (½ Lv ×g21) = +774,500 − (½ 51,111 × 0,11) = +774,500–2,811=+771,689 m
Stasioning
Sta PPV20= 4+000,000
Sta YA = Sta PLV20 + X = (3+974,445) + 12,778 = 3+987,223 Sta PTV20= Sta PPV20 + ½ Lv = (4+000,000) + ½ 51,111= (4+000,000) + 25,5 = 4+025,555 Sta YB= Sta PTV20 − X = (4+025,555) – 12,778 = 4+012,777
SIMPULAN
Hasil evaluasi alinemen vertikal pada lokasi rawan kejadian ketidaknyamanan kendaraan angkutan berat pada jalan lingkar Nagreg menyimpulkan:
1. Pada PPV14 di Sta. 3+065 perbedaan kelandaian adalah sebesar +12,000% (cembung) dengan panjang lengkung 480 m. Jarak pandang henti 46,327 m dan jarak pandang mendahului 210,199 m;
2. Pada PPV20 di Sta. 4+012 perbedaan kelandaian adalah sebesar +11,500% (cembung) dengan panjang lengkung 460 m. Jarak pandang henti 46,327 m dan jarak pandang mendahului 210,199 m.
Dari hasil evaluasi tergambarkan adanya permasalahan yang terjadi pada kedua lengkung vertikal tersebut yang didasarkan pada perbedaan kelandaian yang melebihi ketentuan normatif, yaitu adanya perbedaan kelandaian yang melebihi 10%.
DAFTAR PUSTAKA
1. Direktorat Jenderal Bina Marga, 1997, Tata Cara Perencanaan Geometrik Jalan Antar Kota Nomor 038/T/BM/1997, Badan Penerbit Pekerjaan Umum, Jakarta.
2. Direktorat Jenderal Bina Marga, 1990, Panduan Penentuan Klasifikasi Fungsi Jalan Di
Wilayah Perkotaan Nomor
010/T/BNKT/1990, Badan
Penerbit Pekerjaan Umum, Jakarta.
3. Direktorat Jenderal Bina Marga, 2000, Dokumen Perencanaan Jalan Lingkar Nagreg, Kantor Satuan Kerja Non Vertikal Tertentu Perencanaan Dan Pengawasan Jalan Nasional Provinsi Jawa Barat, Bandung.
4. Hendarsin, Shirley L., 2000,
Penuntun Praktis Perencanaan Teknik Jalan Raya, Politeknik Negeri Bandung Jurusan Teknik Sipil, Bandung.
5. Pemerintah Republik Indonesia, 2006, Peraturan Pemerintah Nomor 34 Tahun 2006 Tentang Jalan, Sekretariat Negara, Jakarta.
RIWAYAT PENULIS
Samun Haris, Praktisi Pekerjaan Umum Kebinamargaan serta Dosen Teknik Sipil