Kalimantan’s Phisics Competetion 2018
KalPhiCo 2018
Olimpiade SMA
Pembahasan Soal Tahap II Number 1 : Analisa Grafik
Dua mobil A dan B bergerak melalui jalan yang sama dan berangkat dari titik awal yang sama secara bersamaan. Kurva kecepatan 𝑣 kedua mobil sebagai fungsi waktu 𝑡 diberikan pada gambar di samping.
Tentukan:
a. persamaan jarak tempuh mobil A dan B sebagai fungsi dari waktu.
b. Jika setelah menempuh jarak 60 m mobil A melambat dengan besar perlambatan yang sama dengan percepatan ketika awal perjalanan, kapan dan dimana mobil B berhasil menyusul kembali mobil A?
Pembahasan :
a. Mobil A melakukan gerak lurus berubah beraturan dengan kecepatan awal 𝑣𝐴,0 =
2 m/s dan percepatan
𝑎 =Δ𝑣Δ𝑡 = 4 − 24 − 0 =12 m/s
Kecepatan mobil A sebagai fungsi waktu adalah
𝑎 =𝑑𝑣𝑑𝑡 =12
∫𝑣𝐴(𝑡)𝑑𝑣 𝑣𝐴,0=2
= ∫𝑡12 𝑑𝑡 0
𝑣𝐴(𝑡) − 2 =12 𝑡 ⟹ 𝑣𝐴(𝑡) = 2 +12 𝑡
Jarak tempuh mobil A sebagai fungsi waktu adalah
𝑣𝐴(𝑡) =𝑑𝑥𝑑𝑡 = 2 +𝐴 12 𝑡
𝑣(m/s)
𝑡(s) 4
2 4
mobil A
∫ 𝑑𝑥𝐴 𝑥𝐴(𝑡)
0 = ∫ (2 +
1 2 𝑡) 𝑑𝑡 𝑡
0 ⟹ 𝑥𝐴(𝑡) = 2𝑡 + 1 4 𝑡2
Mobil B melakukan gerak lurus beraturan (percepatannya nol) dengan kecepatan konstan 𝑣𝐵 = 4 m/s, maka jerak tempuh mobil B sebagai fungsi waktu adalah
𝑣𝐵= 𝑑𝑥𝑑𝑡 = 4𝐵
∫ 𝑑𝑥𝐵 𝑥𝐵(𝑡)
0 = ∫ 4𝑑𝑡
𝑡
0 ⟹ 𝑥𝐵(𝑡) = 4𝑡
b. Ketika mobil A mencapai jarak 60 meter berarti 𝑡 = 12 s (silahkan buktikan) dan saat itu kecepatannya adalah 8 m/s (silahkan buktikan). Kemudian pada saat itu pula mobil B telah menempuh jarak 48 m. Posisi kedua mobil sekarang sebagai fungsi waktu akan menjadi
𝑥𝐴(𝑡) = 𝑥𝐴,0′ + 𝑣0,𝐴′ 𝑡′+12 𝑎𝐴′𝑡′2 = 60 + 8𝑡′−14 𝑡′2
𝑥𝐵(𝑡) = 𝑥𝐵,0′ + 𝑣0,𝐵′ 𝑡′+12 𝑎𝐵′𝑡′2= 48 + 4𝑡′
Saat kedua mobil bertemu, dia berada di posisi yang sama, misal terjadi saat 𝑡′= 𝜏
𝑥𝐴(𝜏) = 𝑥𝐵(𝜏)
60 + 8𝜏 −14 𝜏2 = 48 + 4𝜏 1
4 𝜏2− 4𝜏 − 12 = 0 𝜏2− 16𝜏 − 48 = 0
Dengan rumus kuadrat
𝜏 =−(−16) ± √(−16)2(1)2− 4(1)(−48)
𝜏 =16 ± √256 + 1922
𝜏 =16 ± √4482 = 16 ± 8√72 𝜏 = 8 ± 4√7
𝜏 = 8 + 4√7 ≈ 18,6 s atau 𝜏 = −2,6 s
Solusi yang fisis adalah 𝜏 = 18,6 s sedangkan 𝜏 = −2,6 s bukanlah solusi yang diharapkan, nilai negatif menandakan kejadian yang terjadi sebelum acuan kondisi awal kita, yaitu 𝑡 = 12 s. Hal ini karena adanya perubahan arah percepatan pada mobil A. Kita tahu dari grafik pada c bahwa setelah bertemu untuk pertama kalinya, mobil A akan berada di depan mobil B sehingga ketika diperlambat, mobil A dan B hanya akan berpapasan satu kali.
𝑇 = 𝑡 + 𝜏 = 12 + 18,6 = 30,6 s
Posisi kedua mobil saat itu dihitung dari posisi awal adalah
𝑥𝐵(𝜏) = 𝑥𝐴(𝜏) = 48 + 4(30,6 ) = 170,4 m
Number 2 : Tangga yang Meluncur
Sebuah tangga pejal homogen dengan massa 𝑚 dan panjang 𝑙 bersandar pada dinding licin dan berada di atas lantai yang juga licin. Mula-mula tangga di sandarkan HAMPIR menempel dengan dinding dan dalam keadaan diam. Setelah di lepas tangga itu pada bagian atasnya merosot ke bawah, dan tangga bagian bawah bergerak ke kanan, seperti ditunjukkan pada gambar di bawah.
Tentukan Kecepatan pusat massa dari tangga tersebut selama bergerak! Pembahasan :
a. Kita gunakan definisi dari soal bahwa sudut antara tangga dan dinding adalah 𝜃. Kecepatan pusat tangga berubah-ubah dan kita bisa menyatakannya sebagai fungsi dari sudut 𝜃. Hal ini boleh dilakukan karena soal menanyakan kecepatan pusat massa batang selama bergerak, sedangkan nilainya berubah-ubah, maka kita bisa menyatakannya sebagai satu buah variabel yang berubah dan dalam hal ini kita pilih
𝜃. Sebenarnya bisa juga kita nyatakan dalam variabel lain seperti tinggi titik sentuh tangga dengan dinding, atau jarak titik sentuh tangga dengan lantai terhadap dinding, namun bentuk yang cukup sederhana adalah ketika kita nyatakan sebagai fungsi 𝜃. Soal ini lebih mudah kita kerjakan menggunakan Hukum Kekekalan Energi Mekanik (yap betul, energi mekanik sistem kekal karena tidak ada gaya non konservatif yang bekerja pada tangga, hal ini juga karena seluruh permukaan licin). Kita jadikan lantai sebagai acuan energi potensial sama dengan nol, energi mekanik awal sistem adalah
𝐸𝑀𝑖 = 12 𝑚𝑔𝐿
memiliki komponen kecepatan pusat massa arah horizontal 𝑣𝑥 dan arah vertikal 𝑣𝑦 serta batang juga berotasi terhadap pusat massanya sendiri dengan kecepatan sudut
𝜔. Sehingga energi tangga akan menjadi
𝐸𝑀𝑓 = 12 𝑚𝑔𝐿 cos 𝜃 +12 𝑚(𝑣𝑥2+ 𝑣𝑦2) +12 𝐼𝜔2
Selanjutnya kita cari dulu hubungan 𝑣𝑥, 𝑣𝑦, dan 𝜔.
Dapat kita lihat bahwa ujung atas tangga hanya bergerak dalam arah vertikal dan ujung bawah tangga hanya bergerak dalam arah vertikal. Kita tinjau gerak pusat massa arah horizontal relatif terhadap ujung atas tangga akan kita dapatkan
𝑣𝑥= 𝜔𝐿2 cos 𝜃
Kemudian tinjau gerak pusat massa arah vertikal relatif terhadap ujung bawah tangga akan kita dapatkan pula
𝑣𝑦 =𝜔𝐿2 sin 𝜃
Kita modifikasi menjadi
𝑣𝑥2 + 𝑣𝑦2 = (𝜔𝐿2 cos 𝜃) 2
+ (𝜔𝐿2 sin 𝜃)2 =𝜔24𝐿2
Juga kita tahu bahwa 𝑣𝑥2+ 𝑣𝑦2 = 𝑣2 adalah kecepatan pusat massa batang sehingga
𝜔2 =4𝑣2 𝐿2
momen inersia batang terhadap pusat massanya adalah 𝐼 =12 𝑚𝐿1 2
𝐸𝑀𝑓 = 12 𝑚𝑔𝐿 cos 𝜃 +12 𝑚𝑣2+12 (12 𝑚𝐿1 2) (4𝑣 2 𝐿2 ) 𝐸𝑀𝑓 = 12 𝑚𝑔𝐿 cos 𝜃 +23 𝑚𝑣2
Hukum Kekekalan Energi mekanik
𝐸𝑀𝑖 = 𝐸𝑀𝑓
𝑣𝑥
𝑣𝑦
1
2 𝑚𝑔𝐿 = 1
2 𝑚𝑔𝐿 cos 𝜃 + 2 3 𝑚𝑣2 1
2 𝑔𝐿(1 − cos 𝜃) = 2 3 𝑣2
𝑣2 = 4𝑔𝐿
3 (1 − cos 𝜃) ⟹ 𝑣 = √ 3𝑔𝐿
4 (1 − cos 𝜃)
Number 3 : Sistem Katrol dan Dua Silinder Pejal
Pada sistem di bawah ini, benda berupa silinder dengan jari-jari luar 𝑅, jari-jari dalam 𝑟 terletak pada bidang miring. Sedangkan massa yang tergantung adalah silinder yang juga berjari-jari 𝑟. Abikan massa katrol pada bidang miring. Gunakan momen inersia silinder
1/2 𝑀𝑅2. Tinjau kasus bidang miring licin. Tentukan percepatan 𝑚 terhadap bumi.
Pembahasan :
Perhatikan gambar di bawah ini!
Percepatan pusat massa silinder 𝑀 terhadap tanah adalah 𝑎𝑀 Percepatan sudut silinder 𝑀 terhadap tanah adalah 𝛼𝑀 Percepatan pusat massa silinder 𝑚 terhadap tanah adalah 𝑎𝑚 Percepatan sudut silinder 𝑚 terhadap tanah adalah 𝛼𝑚
𝑀
𝑅
𝑚
𝜃 𝑟
𝑟
𝑀 𝑅
𝑚
𝜃 𝑟
𝑟
𝑚𝑔 𝑀𝑔
𝑇 𝑇
𝑎𝑚
𝑁
𝛼𝑚
Hukum II Newton Untuk gerak silinder 𝑀 Translasi
𝑀𝑔 sin 𝜃 − 𝑇 = 𝑀𝑎𝑀… (1)
Rotasi
𝑇𝑟 =12 𝑀𝑅2𝛼
𝑀 ⟹ 𝑇 =2𝑟 𝑀𝑅1 2𝛼𝑀… (2)
Hukum II Newton Untuk gerak silinder 𝑚 Translasi
𝑚𝑔 − 𝑇 = 𝑚𝑎𝑚… (3)
Rotasi
𝑇𝑟 =12 𝑚𝑟2𝛼
𝑚 ⟹ 𝑇 =12 𝑚𝑟𝛼𝑚… (4)
Jika diperhatikan percepatan silinder 𝑚 adalah percepatan tali ditambah percepatan pusat massa silinder 𝑚 terhadap tali yang besarnya adalah 𝛼𝑚𝑟 (silider 𝑚 dapat dianggap menggelinding tanpa silip pada tali). Sekarang berapa nilai percepatan tali. Kita amati silinder 𝑀. Tali dipercepat ke kanan bawah sejajar bidang miring dengan percepatan 𝑎𝑀 namun juga dipercepat ke kiri atas sejajar bidang miring dengan percepatan 𝛼𝑀𝑟. Jika kita asumsikan tali lebih cenderung bergerak ke kiri atas atau nilai 𝛼𝑀𝑟 > 𝑎𝑀 maka percepatannnya adalah 𝑎𝑡𝑎𝑙𝑖 = 𝛼𝑀𝑟 − 𝑎𝑀 dan jika pun sebaliknya yaitu tali lebih cenderung bergerak ke kanan bawah atau nilai 𝛼𝑀𝑟 < 𝑎𝑀 maka percepatannya adalah
𝑎𝑡𝑎𝑙𝑖 = 𝑎𝑀 − 𝛼𝑀𝑟. Jika kita hubungkan dengan percepatan silinder 𝑚 akan menjadi
Untuk asumsi pertama 𝛼𝑀𝑟 > 𝑎𝑀 (arah percepatan tali searah dengan percepatan silinder 𝑚)
𝑎𝑚 = 𝛼𝑚𝑟 + 𝑎𝑡𝑎𝑙𝑖= 𝛼𝑚𝑟 + 𝛼𝑀𝑟 − 𝑎𝑀
Untuk asumsi kedua 𝛼𝑀𝑟 < 𝑎𝑀 (arah percepatan tali berlawanan arah dengan percepatan silinder 𝑚)
𝑎𝑚 = 𝛼𝑚𝑟 − 𝑎𝑡𝑎𝑙𝑖= 𝛼𝑚𝑟 − (𝑎𝑀 − 𝛼𝑀𝑟) = 𝛼𝑚𝑟 + 𝛼𝑀𝑟 − 𝑎𝑀
Dan hasilnya sama saja, jadi dapat kita simpulkan hubungan antar percepatannya adalah
𝑎𝑚 = 𝛼𝑚𝑟 + 𝛼𝑀𝑟 − 𝑎𝑀… (5)
Subtitusi persamaan (4) ke (3)
Subtitusi persamaan (2) ke (3)
𝑚𝑔 −2𝑟 𝑀𝑅1 2𝛼
𝑀 = 𝑚𝑎𝑚 ⟹ 𝛼𝑀𝑟 =2𝑚𝑟
2
𝑀𝑅2 (𝑔 − 𝑎𝑚) … (7)
Kurangkan persamaan (1) dengan (3)
𝑀𝑔 sin 𝜃 − 𝑇 = 𝑀𝑎𝑀 𝑚𝑔 − 𝑇 = 𝑚𝑎𝑚
(𝑀 sin 𝜃 − 𝑚)𝑔 = 𝑀𝑎𝑀− 𝑚𝑎𝑚−
𝑎𝑀 = (𝑀 sin 𝜃 − 𝑚)𝑔 + 𝑚𝑎𝑀 𝑚… (8)
Subtitusi persamaan (6), (7), dan (8) ke (5)
𝑎𝑚 = 2𝑔 − 2𝑎𝑚+2𝑚𝑟
Number 4 : Osilasi Sistem Dua Massa Dengan Gaya Gravitasi sebagai Gaya Pemulihnya
Tinjau sebuah sistem terisolasi yang terdiri dari 2 benda, 𝑚1 dan 𝑚2. Dalam sistem ini gaya gravitasi lain dari benda lain di luar sistem dapat diabaikan. Massa 𝑚1 terpasang pada tali tak bermassa sepanjang d dan membentuk sebuah bandul yang dipasang tetap pada titik O. Massa 𝑚1 hanya mengalami gaya gravitasi dengan bola homogen bermassa
𝑚2 berjari-jari 𝑅 yang posisinya tetap dimana pusat bola
berjarak 𝐿 dari titik O. Nilai 𝐿 hanya sedikit lebih besar dari
𝑑 + 𝑅. Sudut antara tali dan garis vertikal yang melalui titik O adalah 𝜃, dimana diasumsikan 𝜃 kecil. Tentukan periode osilasi 𝑚1.
Petunjuk : kita bisa menyelesaikan soal ini dengan metode energi maupun metode gaya.
Pembahasan :
Cara 1 : Metode Gaya
Karena gerak massa 𝑚1 berayun, kita akan lebih mudah menentukan persamaan geraknya dengan meninjau gerak rotasinya. Torsi pemulih yang bekerja pada massa 𝑚1
diberikan oleh gaya gravitasi akibat adanya bola 𝑚2 dan arah gaya ini selalu menuju pusat bola 𝑚2. Perhatikan gambar di bawah ini!
Gaya gravitasi bekerja pada massa 𝑚1adalah
𝐹𝑔 = 𝐺𝑚𝑠12𝑚2
Menggunakan hukum dua neton tentang gerak rotasi akan kita dapatkan
𝐹𝑔sin(𝜃 + 𝜙) 𝑑 = 𝑚1𝑑2𝛼 𝐺𝑚2
𝑑𝑠2 (sin 𝜃 cos 𝜙 + sin 𝜙 cos 𝜃) = 𝛼 … (1)
Perhatikan lagi gambar di atas, kita bisa mendapatkan nilai 𝑠 dengan menggunakan phytagoras
𝑠2 = (𝐿 − 𝑑 cos 𝜃)2+ 𝑑2sin2𝜃
𝑠2 = 𝐿2− 2𝐿𝑑 cos 𝜃 + 𝑑2cos2𝜃 + 𝑑2sin2𝜃 𝑠2 = 𝐿2− 2𝐿𝑑 cos 𝜃 + 𝑑2(sin2𝜃 + cos2𝜃) 𝑠2 = 𝐿2− 2𝐿𝑑 cos 𝜃 + 𝑑2
Dengan menggunakan aturan dasar trigonometri akan kita dapatkan
sin 𝜙 =𝑚𝑖𝑟𝑖𝑛𝑔 =𝑑𝑒𝑝𝑎𝑛 𝑑 sin 𝜃𝑠
cos 𝜙 =𝑠𝑎𝑚𝑝𝑖𝑛𝑔𝑚𝑖𝑟𝑖𝑛𝑔 = 𝐿 − 𝑑 cos 𝜃𝑠
𝐹𝑔sin(𝜃 + 𝜙) 𝐹𝑔 𝜃
𝑑 𝐿
𝑚1
𝑅 𝑚2
𝑑 cos 𝜃
𝐿 − 𝑑 cos 𝜃
𝑠 𝜙
Karena kita asumsikan simpangan sudut 𝜃 sangat kecil, kita bisa menggunakan hampiran berikut
sin 𝜃 ≈ 𝜃 dan cos 𝜃 ≈ 1, maka akan kita dapatkan
𝑠2 = 𝐿2− 2𝐿𝑑 + 𝑑2 = (𝐿 − 𝑑)2 𝑠 = 𝐿 − 𝑑
sin 𝜙 =𝑑𝜃𝑠
cos 𝜙 =𝐿 − 𝑑𝑠
Subtitusi hasil ini ke persamaan (1)
𝐺𝑚2 𝑑𝑠2 (𝜃
𝐿 − 𝑑 𝑠 +
𝑑𝜃 𝑠 ) = 𝛼 𝐺𝑚2𝐿
𝑑𝑠3 𝜃 = 𝛼 𝐺𝑚2𝐿
𝑑(𝐿 − 𝑑)3𝜃 = 𝛼 … (2)
Perhatikan bahwa arah simpangan 𝜃 adalah berlawanan arah jarum jam dari titik setimbangnya sedangkan arah percepatan sudut nya searah jarum jam, berarti percepatan sudut massa 𝑚1 adalah negatif(karena berlawanan arah) dari turunan kedua simpangan sudutnya atau
𝛼 = −𝑑𝑑𝑡2𝜃2 = −𝜃̈
Subtitusi hasil ini ke persamaan dua dan kita akan dapatkan persamaan gerak harmonik sederhana sistem
𝐺𝑚2𝐿
𝑑(𝐿 − 𝑑)3𝜃 = −𝜃̈
𝜃̈ +𝑑(𝐿 − 𝑑)𝐺𝑚2𝐿 3𝜃 = 0
Persamaan terakhir analog dengan persamaan umum gerak harmonik sederhana yang berbentuk 𝜃̈ + 𝜔2𝜃 = 0, maka kecepatan sudut osilasi sistem adalah
𝜔 = √𝑑(𝐿 − 𝑑)𝐺𝑚2𝐿 3
𝑇 = 2𝜋𝜔 → 𝑇 = 2𝜋√𝑑(𝐿 − 𝑑)3 𝐺𝑚2𝐿
Cara 2 : Metode Energi
Sebenarnya menggunakan cara energi untuk sistem ini akan lebih cepat namun terkadang ada soal yang lebih mudah menggunakan cara gaya ataupun cara energi, jadi kita harus bisa keduanya dan tentunya harus bisa memilih cara mana yang paling efisien.
Untuk menggunakan cara ini kita harus tentukan energi total sistem terlebih dahulu. Karena tidak ada gaya udara dan gaya luar non-konservatif yang bekerja pada sistem, maka energi total sistem kekal. Untuk mendapatkan persamaan geraknya, kita cukup menurun persaan energinya satu kali terhadap waktu dan karena energi kekal atau konstan, turunannya ini akan sama dengan nol. Baik akan saya contohkan caranya.
𝑑
Number 5 : Roket Berpindah Orbit
Sebuah roket bermassa total 𝑚 mengelilingi bumi pada low earth orbit berbentuk lingkaran dengan jari-jari orbit
𝑅1. Roket ini akan berpindah orbit menuju orbit menuju
orbit berjari jari 𝑅2 > 𝑅1 dengan cara mengubah bentuk orbitnya dalam bentuk orbit elips seperti yang ditunjukkan oleh garis tebal pada gambar disamping. Manuver orbit ini dicapai dengan membuang bahan bakar sebanyak Δ𝑚1 > 0 sehingga memberika laju Δ𝑣1 searah kecepatan orbit pada orbit rendah. Kemudian roket membuang lagi bahan bakar sebanyak Δ𝑚2 > 0
sehingga memberikan tambahan laju Δ𝑣2 searah kecepatan orbit pada orbit tinggi. Laju orbit roket untuk orbit rendah adalah 𝑣𝑅1 . Bahan bakar roket memiliki laju buang konstan 𝑣𝑓relatif terhadap roket. Tentukan tambahan laju Δ𝑣1 yang dibutuhkan untuk mengubah orbit dari lingkaran berjari-jari 𝑅1 menjadi elips (nyatakan dalam 𝑣𝑅1 , 𝑅1, 𝑅2). Pembahasan :
Kecepatan roket ketika berada di orbit 𝑅1 adalah 𝑣𝑅1. Dengan menggunakan persamaan gaya sentripetal dimana gaya gravitasilah yang berperan sabagai gaya sentripetal di sini, kita bisa menyatakan 𝑣𝑅1 ulang sebagai berikut
𝐹𝐺 = 𝐹𝑠
𝑅2 𝑅1
𝐺𝑀𝐵𝑚
Roket kemudian membuang bahan bakarnya sehingga kecepatannya bertambah dan lintasan roket berubah menjadi elips. Ketika penambahan kecepatan ini terjadi, roket berada di perihelium atau jarak terdekatnya dengan bumi yaitu 𝑅1 dan kecepatannya di sini adalah 𝑣𝑝. Planet terus bergerak sampai suatu ketika dia berada di aphelium atau jarak terjauhnya dari bumi dalam lintasan elips ini yaitu 𝑅2 dan kecepatannya di sini adalah 𝑣𝑎. Kita bisa mencari 𝑣𝑝 dan 𝑣𝑎 dari hukum kekekalan momentum sudut dan hukum kekekalan energi. Pada kasus gerak melingkar terhadap dengan gaya gravitasi sebagai gaya sentripetalnya momentum sudut sistem akan kekal karena arah gaya gravitasi dan jari-jarinya sejajar, karena torsi adalah perkalian silang antara keduanya maka nilai torsi eksternal pada sistem bernilai nol. Alhasil momentum sudut sistem kekal. Kita gunakan hukum kekekalan momentum sudut untuk keadaan perihelium dan aphelium
𝐿𝑎 = 𝐿𝑝
(𝑚 − Δ𝑚1)𝑣𝑎𝑅2 = (𝑚 − Δ𝑚1)𝑣𝑝𝑅1 𝑣𝑎 =𝑅𝑅1
2𝑣𝑝
Kemudian kita gunakan hukum kekekalan energi untuk dua keadaan seperti sebelumnya
𝑣𝑎 =𝑅𝑅1
2𝑣𝑝 =
𝑅1 𝑅2√
2𝑅2 𝑅2+ 𝑅1𝑣𝑅1
Penambahan kecepatan Δ𝑣1 ketika orbit planet berubah dari orbit awal berjari-jari 𝑅1 menjadi orbit elips adalah
Δ𝑣1 = 𝑣𝑝− 𝑣𝑅1 = √𝑅2𝑅2
2+ 𝑅1𝑣𝑅1− 𝑣𝑅1
Δ𝑣1 = 𝑣𝑅1(√𝑅2𝑅2
2+ 𝑅1− 1)
Number 6 : Perbandingan Energi Kinetik Roda Luar dan Dalam
Sebuah mobil roda empat membelok pada suatu tikungan berbentuk lingkaran. Lintasan tengah poros roda belakang membentuk lingkaran terhadap pusat tikungan tersebut dengan jari-jari 𝑅. Panjang poros atau jarak antara kedua roda belakang adalah 𝐻. Massa masing-masing roda belakang adalah 𝑚. Roda belakang dapat diasumsikan sebagai suatu cakram dengan jari-jari 𝑏. Ambil nilai 𝑅 = 10 meter, 𝐻 = 2 meter dan 𝑏 = 0,5 meter. Jika perbandingan energi kinetik total antara roda belakang luar dengan roda belakang dalam adalah 𝑘, tentukan nilai 𝑘.
Pembahasan : Misalkan
Kecepatan pusat massa dan kecepatan sudut roda belakang dalam 𝑣1 dan 𝜔1 Kecepatan pusat massa dan kecepatan sudut roda belakang luar 𝑣2 dan 𝜔2
Kecepatan sudut bagian tengah poros kedua roda belakang terhadap pusat lintasan ω Energi kinetik roda daalam adalah
𝐸𝐾1 =12 𝑚𝑣12+12 (12 𝑚𝑏2) 𝜔12
Gerakan roda adalah menggelinding tanpa slip maka akan berlaku
𝑣1 = 𝜔1𝑏
𝐸𝐾1 =34 𝑚𝑏2𝜔12
Dengan cara yang sama energi kinetik roda luar adalah
𝐸𝐾2 = 34 𝑚𝑏2𝜔22
Hubungan 𝜔1 dengan 𝜔
𝑣1 = 𝜔1𝑏 = 𝜔 (𝑅 −12 𝐻) ⟹ 𝜔1= 2𝑅 − 𝐻2𝑏 𝜔
𝑣2 = 𝜔2𝑏 = 𝜔 (𝑅 +12 𝐻) ⟹ 𝜔2 =2𝑅 + 𝐻2𝑏 𝜔
Energi kinetik kedua roda menjadi
𝐸𝐾1 =16 𝑚3 (2𝑅 − 𝐻)2𝜔
𝐸𝐾2 = 16 𝑚3 (2𝑅 + 𝐻)2𝜔
Perbandingan energi kinetik roda luar dan dalam adalah
𝐸𝐾2 𝐸𝐾1 =
3
16 𝑚(2𝑅 + 𝐻)2𝜔 3
16 𝑚(2𝑅 − 𝐻)2𝜔 𝐸𝐾2
𝐸𝐾1 = (
2𝑅 + 𝐻 2𝑅 − 𝐻)
2
Sampai disini, menurut kamu apakah hasil ini benar? So far, sebenarnya ada hal yang lupa dipertimbangkan sehingga hasil ini tidak benar. Hasil tadi akan benar jika roda bukanlah benda tegar, namun kenyataannya di sini, ukuran roda tidak bisa kita abaikan. So mari kita tinjau ulang.
Gerakan roda belakang dalam dan luar sebenarnya adalah seperti berikut
Kita buat permisalan yang baru. Misalkan
Kecepatan sudut roda belakang luar terhadap pusat lintasan dan pusat massanya sendiri adalah Ω1 dan 𝜔1
Kecepatan sudut roda belakang dalam terhadap pusat lintasan dan pusat massanya sendiri adalah Ω2 dan 𝜔2
Kecepatan sudut bagian tengah poros kedua roda belakang terhadap pusat lintasan ω Energi kinetik roda belakang bagian luar dan dalam adalah
𝐸𝐾1 =12 𝐼pl1Ω12 +12 𝐼pm𝜔12
𝐸𝐾2 = 12 𝐼pl2Ω22+12 𝐼pm𝜔22
𝑅 𝐻
𝑧
𝑦
Dengan 𝐼pm adalah momen inersia roda terhadap pusat massanya dan roda berputar terhadap sumbu 𝑧 sedangkan 𝐼pl1 dan 𝐼pl2 adalah momen inersia masing-masing roda terhadap pusat lintasan.
𝐼pm= 𝐼𝑧 = 12 𝑚𝑏2
Untuk menghitung 𝐼pl1 dan 𝐼pl2 kita hitung dulu momen inersia roda untuk rotasi pada sumbu 𝑦 menggunakan teorema sumbu tegak lurus
𝐼𝑧 = 𝐼𝑥+ 𝐼𝑦
Karena roda simetri 𝐼𝑥= 𝐼𝑦 maka
𝐼𝑦 =12 𝐼𝑧 =14 𝑚𝑏2
Momen inersia roda luar dan dalam terhadap pusat lintasan dapat kita cari menggunakan teorema sumbu sejajar
𝐼pl1 = 𝐼𝑦+ 𝑚 (𝑅 +12 𝐻) 2
= 14 𝑚𝑏2+ 𝑚 (𝑅 +1 2 𝐻)
2
= 14 𝑚[𝑏2+ (2𝑅 + 𝐻)2]
𝐼pl2 = 𝐼𝑦+ 𝑚 (𝑅 −12 𝐻) 2
= 14 𝑚𝑏2+ 𝑚 (𝑅 −1 2 𝐻)
2
= 14 𝑚[𝑏2+ (2𝑅 − 𝐻)2]
Hubungan 𝜔1, Ω1, dan 𝜔 adalah
𝜔1𝑏 = 𝜔 (𝑅 +12 𝐻) ⟹ 𝜔1 =2𝑏1 (2𝑅 + 𝐻)𝜔
Ω1(𝑅 +12 𝐻) = 𝜔 (𝑅 +12 𝐻) ⟹ Ω1 = 𝜔
Hubungan 𝜔2, Ω2, dan 𝜔 adalah
𝜔2𝑏 = 𝜔 (𝑅 −12 𝐻) ⟹ 𝜔2 =2𝑏1 (2𝑅 − 𝐻)𝜔
Ω2(𝑅 −12 𝐻) = 𝜔 (𝑅 −12 𝐻) ⟹ Ω2 = 𝜔
Energi kinetik roda belakang bagian luar akan menjadi
𝐸𝐾1 =12 (14 𝑚[𝑏2 + (2𝑅 + 𝐻)2]) 𝜔2+12 (12 𝑚𝑏2)4𝑏12(2𝑅 + 𝐻)2𝜔2
𝐸𝐾1 =16 𝑚1 [2𝑏2 + 3(2𝑅 + 𝐻)2]𝜔2
Dengan cara yang sama untuk roda belakang bagian dalam
𝐸𝐾2 = 16 𝑚1 [2𝑏2+ 3(2𝑅 − 𝐻)2]𝜔2
Maka rasio energi kinetik roda belakang bagian luar dan dalam
𝑘 =𝐸𝐾𝐸𝐾1
2 =
1
16 𝑚[2𝑏2+ 3(2𝑅 + 𝐻)2]𝜔2 1
𝑘 =2𝑏2𝑏22 + 3(2𝑅 + 𝐻)+ 3(2𝑅 − 𝐻)22
Dengan memasukkan nilai 𝑅 = 10 m, 𝐻 = 2 m, dan 𝑏 = 0,5 m akan kita dapatkan
𝑘 =2(0,5)2(0,5)22+ 3(2.10 + 2)+ 3(2.10 − 2)22 = 1452,5972,5 = 1,49357326 … 𝑘 = 1,49
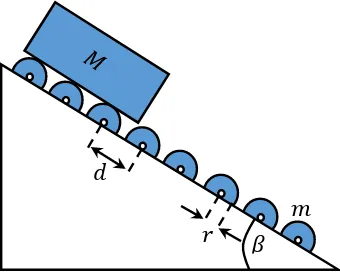
Number 7 : Peluncur Barang
Gambar di bawah memperlihatkan sebuah peluncur barang (slipway) yang sangat panjang, dan berbentuk bidang miring yang membentuk sudut 𝛽 terhadap arah mendatar. Bidang miring tersebut dilengkapi dengan sangat banyak roda (roller) identik, dengan dua roda terdekat berada pada jarak 𝑑 satu sama lain (lihat gambar). Semua roda tersebut memiliki sumbu-sumbu rotasi mendatar dan merupakan silinder-slinder baja pejal yang permukaannya diselubungi dengan lapisan karet yang tipis dan diabaikan massanya. Masing-masing silinder tersebut bermassa 𝑚 dan berjari-jari 𝑟. Sebilah papan dengan massa 𝑀 dan panjang jauh lebih besar daripada 𝑑, mulai dilepas dari puncak peluncur barang tersebut. Abaikan gesekan udara dan gesekan pada poros-poros roda tersebut. Tentukan kelajuan akhir (terminal speed) 𝑣max papan tersebut.
Pembahasan :
Misalkan papan sudah bergerak sejauh 𝑆 sepanjang bidang miring sampai akhirnya antara roda dan papan tidak terjadi slip lagi. Penurunan energi potensial papan sebesar
𝑀𝑔𝑆 sin 𝛽. Maka sebanyak 𝑆/𝑑 buah roda akan memiliki kecepatan linier permukaan yang sama dengan kecepatan papan, yaitu 𝑣max. Maka kecepatan sudut tiap roda yang bergerak pada saat ini menjadi 𝜔max = 𝑣max/𝑟.
Momen inersia tiap roda adalah
𝐼 =12 𝑚𝑟2
Penurunan energi potensial papan ini diubah menjadi energi kinetik roda.
𝑀𝑔𝑆 sin 𝛽 =𝑆𝑑12 𝐼𝜔max2
𝑀𝑔𝑆 sin 𝛽 =𝑆𝑑12 (12 𝑚𝑟2) (𝑣max 𝑟 )
2
𝑀𝑔𝑆 sin 𝛽 =𝑆𝑑14 𝑚𝑣max2… (1)
𝑣max= √4𝑀𝑔𝑑 sin 𝛽𝑚
Sebenarnya hasil di atas salah, karena kita melupakan kalor yang ditimbulkan akibat gesekan antara permukaan roda dan papan sebelum akhirnya papan mencapai kecepatan terminal. Jadi sebenarnya soal ini agak sedikit rumit, namun tidak tidak terlalu rumit juga sih. Okey kita cari dulu energi yang hilang sebagai kalor.
Misalkan 𝑓𝑘 adalah gaya gesek kinetik antara permukaan papan dan roda. Dalam interval waktu yang singkat Δ𝑡, akan terjadi perubahan momentum sudut pada tiap roda sebesar
𝐼Δ𝜔 = 𝑓𝑘𝑟Δ𝑡
Dengan menjumlahkan semua perubahan momentum sudut roda, akan kita dapatkan momentum sudut akhir roda (kecepatannya maksimum pada saat akhir ini)
𝑟 ∑ 𝑓𝑘Δ𝑡 = 𝐼𝜔max = 𝐼𝑣max𝑟
Usaha yang dilakukan gaya gesek kinetik ini pada selang Δ𝑡, akan memunculkan kalor sebesar Δ𝑄 dan besar usaha ini sama dengan gaya gesek kinetik di kalikan dengan besar pergeseran relatif antara kedua permukaan tersebut
Δ𝑄 = 𝑓𝑘(𝑣 − 𝑟𝜔)Δ𝑡
Dengan menjumlahkan semua kalor Δ𝑄 akan kita dapatkan kalor yang ditimbulakn oleh gesekan antara papan dengan sebuah roda
𝑄 = ∑ Δ𝑄
𝑄 = ∑ 𝑓𝑘(𝑣 − 𝑟𝜔)Δ𝑡
𝑄 = ∑ 𝑓𝑘𝑣Δ𝑡 − ∑ 𝜔𝑓𝑘𝑟Δ𝑡
𝑄 = ∑ 𝑓𝑘Δ𝑡 ∑ 𝑣 − 𝐼 ∑ 𝜔Δ𝜔
𝑄 = ∑ 𝑓𝑘Δ𝑡 ∑ 𝑟𝜔 − 𝐼 ∑ 𝜔Δ𝜔
Ingat hubungan diferensial berikut
𝑑(𝜔2) = 2𝜔𝑑𝜔
Karena selang waktu Δ𝑡 sangat singkat, kita bisa lakukan pendekatan
𝑑𝜔 ≈ Δ𝜔 dan 𝑑(𝜔2) ≈ Δ(𝜔2) Δ(𝜔2) = 2𝜔Δ𝜔 ⟹ 𝜔Δ𝜔 =1
𝑄 = 𝑟 ∑ 𝑓⏟ 𝑘Δ𝑡 𝐼𝜔max
∑ 𝜔 ⏟
𝜔max
−2 ∑ Δ𝐼 (𝜔2) ⏟
𝜔max2
𝑄 = 𝐼𝜔max2−12 𝐼𝜔max2
𝑄 =12 𝐼𝜔max2 =12 (12 𝑚𝑟2) (𝑣max𝑟 ) 2
𝑄 =14 𝑚𝑣max2
Tambahkan faktor 𝑄 ini pada persamaan (1) (ingat bahwa 𝑄 adalah energi kinetik tiap roda)
𝑀𝑔𝑆 sin 𝛽 =𝑆𝑑14 𝑚𝑣max2+𝑑 𝑄𝑆
𝑀𝑔𝑆 sin 𝛽 =𝑆𝑑14 𝑚𝑣max2+𝑑𝑆14 𝑚𝑣max2 ⟹ 𝑣max = √2𝑀𝑔𝑑 sin 𝛽𝑚
Number 8 : Kapasitor dan Dielektrik
Sebuah kapasitor keping sejajar mempunyai luas lempeng 𝐴 terpisah sejauh 𝑑. Serta tinggi 𝑎. Ruang di antara kapasitor berisi udara dengan permitivitas yang bisa dianggap sama dengan ruang hampa yaitu 𝜀0. Kapasitor kemudian dihubungkan dengan sebuah baterai yang memiliki tegangan 𝑉0. Kemudian baterai diputuskan, muatan pada kapasitor dipertahankan tetap sebesar 𝑄0, kemudian sebuah lembaran dielektrik padat dengan luas 𝐴 dan tebal 𝑙 (dimana 𝑙 <d) serta konstanta dielektrik 𝐾1 disisipkan tepat di tengah kapasitor. Hitung :
a. Muatan induksi pada dielektrik!
b. Medan listrik pada ruang diantara dielektrik dan plat! c. Medan listrik pada dielektrik!
d. Beda potensial kapasitor setelah dielektrik di masukkan!
Pembahasan :
a. Medan listrik awal pada kapasitor sebelum ada dielektrik adalah
𝐸0 = 𝜎𝜀0
0 =
𝑄0 𝐴𝜀0
Ketika dielektrik dimasukkan, kapasitansi kapasitor akan meningkat namun medan listrik total di dalamnya akan berkurang menjadi 𝐸 dimana
𝐸 =𝐾𝐸0 1
Paul. A Tipler halaman 114). Maka medan listrik pada dielektrik adalah selisih 𝐸 dan
𝐸0.
𝐸D = 𝐸0− 𝐸 𝐸D = 𝐸0(1 −𝐾1
1) 𝜎ind
𝜀0 = 𝜎0 𝜀0(1 −
1
𝐾1) ⟹ 𝑄ind = 𝑄0(1 − 1 𝐾1)
b. Medan listrik pada ruang di antara dielektrik dan plat sama dengan medan listrik awal kapasitor
𝐸0 =𝐴𝜀𝑄0 0
c. Medan listirk pada dielektrik adalah
𝐸D =𝐴𝐾𝑄0 1𝜀0
d. Beda potensial pada kapasitor adalah
𝑉 = − ∫ 𝐸⃗ ̇. 𝑑𝑙 = 𝐸0(𝑑 − 𝑙) + 𝐸D𝑙
𝑉 = 𝐸0(𝑑 − 𝑙) +𝐸𝐾0
1𝑙 ⟹ 𝑉 = 𝑄0