Abstrak - Pergerakan maneuver kapal identik dengan pergerakan ikan saat berenang. Kemampuan ikan bermaneuver dalam berenang tak lepas dari peran bentuk ekor ikan. Dalam pemilihan bentuk ekor ikan berdasar pada prinsip aliran pada belakang propeller, oleh karena itu digunakan bentuk ekor ikan berbentuk forked atau bentuk pengurangan panjang pada bagian tengah, dan bentuk lanceolate atau penambahan panjang pada bagian tengah. Untuk menganalisa besarnya gaya yang dihasilkan dilakukan pendekatan dengan menggunakan permodelan pada program CFD. Penganalisaan dilakuan dengan menggunakan 3 bentuk kemudi tanpa flap dan 3 bentuk kemudi dengan flap tunggal dengan sudut 10 ͦ. Adapun bentuk kemudi yang digunakan adalah bentuk konvensional, forked, dan lanceolate dengan sudut kemudi 10 ͦ, 20 ͦ, 35 ͦ. Dari hasil anilisa program CFD serta dengan rumus pendekatan maneuvering modifkasi kemudi Ikan 1 (forked) dapat meningkatkan coefficient lift sehingga dapat mengurangi nilai komponen maneuvering. Namun untuk Ikan 2 (lanceolate) menurunkan coefficient lift sehingga menambah nilai komponen maneuvering. Untuk validasi digunkan data hasil free running test oleh LHI dan tugas akhir sebelumnya, serta pengujian pada program MPP.
Kata kunci : CFD, Coefficient Lift, Kemudi Ekor Ikan, Maneuverability, Tail Flap
I. PENDAHULUAN
aneuver ability sangat berperan penting dalam antisipasi terjadinya kecelakaan. Terutama di daerah perairan dengan luas terbatas kemampuan Maneuver ability sangatlah dibutuhkan. Karena pentingnya Maneuverability yang harus dimiliki oleh setiap kapal, maka International Maritime Organization (IMO) telah membuat sebuah aturan mengenai kriteria-kriteria Maneuverability yang wajib dimiliki oleh setiap kapal.
Pergerakan maneuver kapal identik dengan pergerakan ikan saat berenang. Kemampuan ikan bermaneuver dalam berenang tak lepas dari peran bentuk tubuh ikan. ikan memiliki bentuk tubuh yang aerodinamis (streamline) untuk mengurangi hambatan ketika bergerak didalam air.
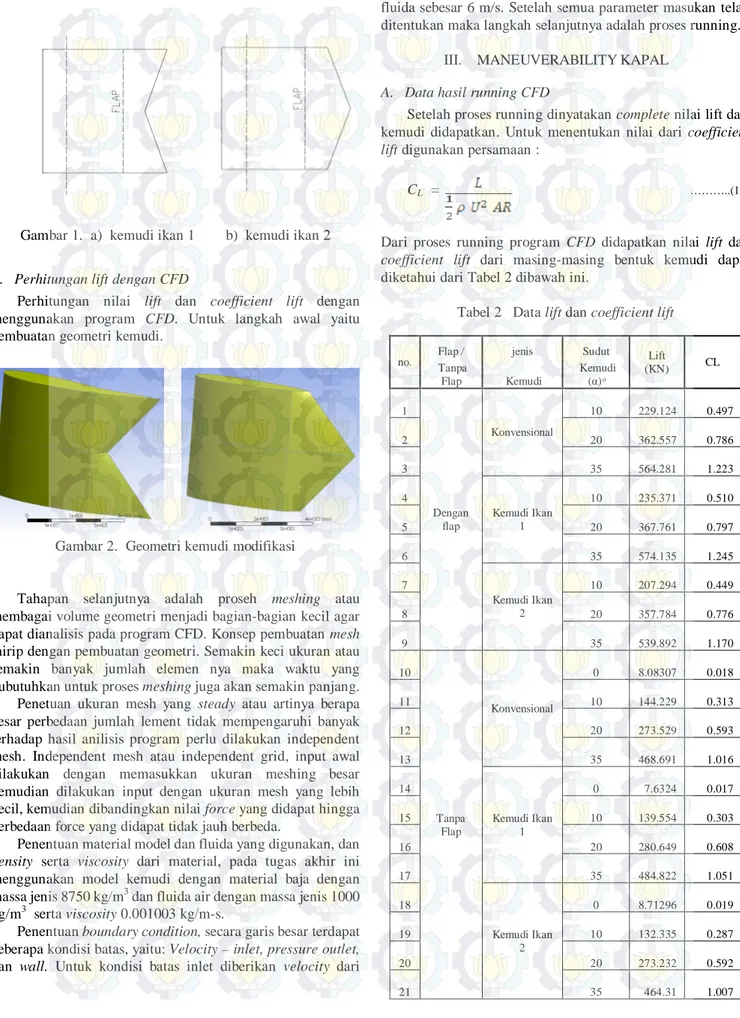
Dalam pemilihan bentuk ekor ikan berdasar pada prinsip aliran pada belakang propeller, oleh karena itu digunakan bentuk ekor ikan berbentuk forked atau bentuk pengurangan panjang pada bagian tengah, dan bentuk lanceolate atau penambahan panjang pada bagian tengah. Dan pada tugas akhir kali ini saya menganalisa kemampuan maneuver kemudi
kapal dengan flap dan memodifikasinya kedalam bentuk ekor ikan tersebut dengan area kemudi yang sama. Dan juga membandingkan kemudi konvensional terhadap kemudi dengan modifikasi bentuk ekor ikan forked namun dengan luas kemudi yang lebih kecil.
Selain itu menurut suatu penilitian (Lanburg, 1976) kapal yang menggunkan daun kemudi yang sudah dimodifikasi dengan menggunakan flap memiliki Maneuverability yang lebih baik dibandingkan kapal yang menggunakan kemudi konvensional atau tanpa flap. Namun belum diketahui secara jelas besar persentasi kenaikan Maneuverability kapal yang menggunkan kemudi modifikasi. Pada percobaan tersebut hanya menjelaskan bahwa kapal yang menggunakan daun kemudi berflap memiliki gaya samping dan koefisien gaya samping yang lebih baik.
Pada tugas akhir ini akan dijelaskan tentang modifikasi kemudi konvensional dengan menjadi kemudi sirip ikan yang telah disebutkan di atas dengan flap tunggal dengan menggunakan simulasi dari program CFD dan membandingkan kemampuan maneuver nya serta dijelaskan secara teoritis hasil dari analisanya.
II. METODE PENELITIAN
Untuk langkah pertama dilakukan identifikasi masalah tentang pengaruh modifikasi kemudi menyerupai bentuk ekor ikan dapat mempengaruhi Maneuverability kapal. Kemudian mengumpulkan studi literature mengenai macam-macam bentuk ekor ikan, penggunaan program CFD, perhitungan coefficient lift dan maneuverability kapal.
A. Ukuran kapal dan kemudi
Lpp : 99.025 m Ukuran kemudi Bm : 18.785 m Panjang Chord ( c ) : 5.6 m T : 6.052 m Panjang span ( s ) : 4.5 m Cb : 0.773 Vs : 6 m/s Ρ : 1025 kg/m3
Setelah ukuran kapal dan kemudi ditentukan, kemudian memodifikasi kemudi konvensional kedalam bentuk kemudi yang menyerupai bentuk ekor ikan.
ANALISIS PENGGUNAAN FLAP PADA MODIFIKASI KEMUDI
MENYERUPAI BENTUK EKOR IKAN TERHADAP
MANEUVERABILITY KAPAL
Hardina Mulyasari, Dosen Pembimbing : Aries Sulisetyono ST.,MA.Sc.Ph.D. dan Ir. Murdijanto, M.Eng.
Teknik Perkapalan, Fakultas Teknologi Kelautan, Institut Teknologi Sepuluh Nopember (ITS)
Jl. Arief Rahman Hakim, Surabaya 60111 Indonesia
e-mail: sulisea@na.its.ac.id
Gambar 1. a) kemudi ikan 1 b) kemudi ikan 2
B. Perhitungan lift dengan CFD
Perhitungan nilai lift dan coefficient lift dengan menggunakan program CFD. Untuk langkah awal yaitu pembuatan geometri kemudi.
Gambar 2. Geometri kemudi modifikasi
Tahapan selanjutnya adalah proseh meshing atau membagai volume geometri menjadi bagian-bagian kecil agar dapat dianalisis pada program CFD. Konsep pembuatan mesh mirip dengan pembuatan geometri. Semakin keci ukuran atau semakin banyak jumlah elemen nya maka waktu yang dubutuhkan untuk proses meshing juga akan semakin panjang.
Penetuan ukuran mesh yang steady atau artinya berapa besar perbedaan jumlah lement tidak mempengaruhi banyak terhadap hasil anilisis program perlu dilakukan independent mesh. Independent mesh atau independent grid, input awal dilakukan dengan memasukkan ukuran meshing besar kemudian dilakukan input dengan ukuran mesh yang lebih kecil, kemudian dibandingkan nilai force yang didapat hingga perbedaan force yang didapat tidak jauh berbeda.
Penentuan material model dan fluida yang digunakan, dan density serta viscosity dari material, pada tugas akhir ini menggunakan model kemudi dengan material baja dengan massa jenis 8750 kg/m3 dan fluida air dengan massa jenis 1000 kg/m3 serta viscosity 0.001003 kg/m-s.
Penentuan boundary condition, secara garis besar terdapat beberapa kondisi batas, yaitu: Velocity – inlet, pressure outlet, dan wall. Untuk kondisi batas inlet diberikan velocity dari
fluida sebesar 6 m/s. Setelah semua parameter masukan telah ditentukan maka langkah selanjutnya adalah proses running.
III. MANEUVERABILITY KAPAL A. Data hasil running CFD
Setelah proses running dinyatakan complete nilai lift dari kemudi didapatkan. Untuk menentukan nilai dari coefficient lift digunakan persamaan :
CL = ………..(1)
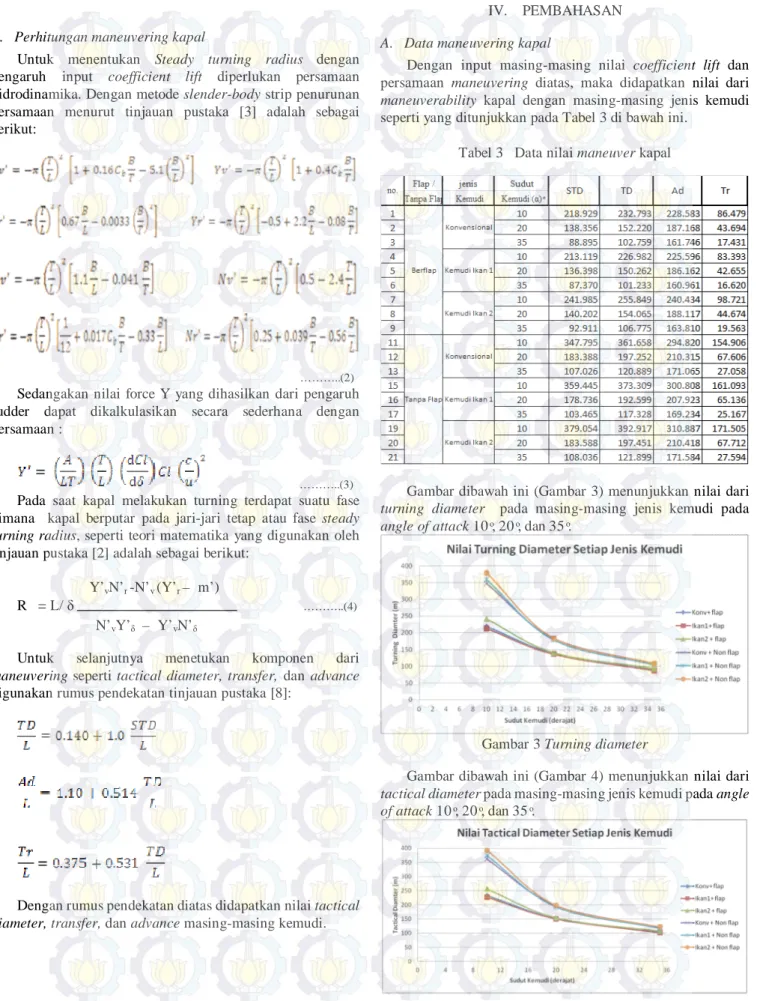
Dari proses running program CFD didapatkan nilai lift dan coefficient lift dari masing-masing bentuk kemudi dapat diketahui dari Tabel 2 dibawah ini.
Tabel 2 Data lift dan coefficient lift
no.
Flap / jenis Sudut Lift
(KN) CL Tanpa Flap Kemudi Kemudi (α) ͦ 1 Dengan flap Konvensional 10 229.124 0.497 2 20 362.557 0.786 3 35 564.281 1.223 4 Kemudi Ikan 1 10 235.371 0.510 5 20 367.761 0.797 6 35 574.135 1.245 7 Kemudi Ikan 2 10 207.294 0.449 8 20 357.784 0.776 9 35 539.892 1.170 10 Tanpa Flap Konvensional 0 8.08307 0.018 11 10 144.229 0.313 12 20 273.529 0.593 13 35 468.691 1.016 14 Kemudi Ikan 1 0 7.6324 0.017 15 10 139.554 0.303 16 20 280.649 0.608 17 35 484.822 1.051 18 Kemudi Ikan 2 0 8.71296 0.019 19 10 132.335 0.287 20 20 273.232 0.592 21 35 464.31 1.007
B. Perhitungan maneuvering kapal
Untuk menentukan Steady turning radius dengan pengaruh input coefficient lift diperlukan persamaan hidrodinamika. Dengan metode slender-body strip penurunan persamaan menurut tinjauan pustaka [3] adalah sebagai berikut:
………..(2) Sedangakan nilai force Y yang dihasilkan dari pengaruh rudder dapat dikalkulasikan secara sederhana dengan persamaan :
………..(3) Pada saat kapal melakukan turning terdapat suatu fase dimana kapal berputar pada jari-jari tetap atau fase steady turning radius, seperti teori matematika yang digunakan oleh tinjauan pustaka [2] adalah sebagai berikut:
R = L/ δ ………..(4)
Untuk selanjutnya menetukan komponen dari maneuvering seperti tactical diameter, transfer, dan advance digunakan rumus pendekatan tinjauan pustaka [8]:
Dengan rumus pendekatan diatas didapatkan nilai tactical diameter, transfer, dan advance masing-masing kemudi.
IV. PEMBAHASAN A. Data maneuvering kapal
Dengan input masing-masing nilai coefficient lift dan persamaan maneuvering diatas, maka didapatkan nilai dari maneuverability kapal dengan masing-masing jenis kemudi seperti yang ditunjukkan pada Tabel 3 di bawah ini.
Tabel 3 Data nilai maneuver kapal
Gambar dibawah ini (Gambar 3) menunjukkan nilai dari turning diameter pada masing-masing jenis kemudi pada angle of attack 10 ͦ, 20 ͦ, dan 35 ͦ.
Gambar 3 Turning diameter
Gambar dibawah ini (Gambar 4) menunjukkan nilai dari tactical diameter pada masing-masing jenis kemudi pada angle of attack 10 ͦ, 20 ͦ, dan 35 ͦ.
N’vY’δ – Y’vN’δ
Gambar 4 Tactical diameter
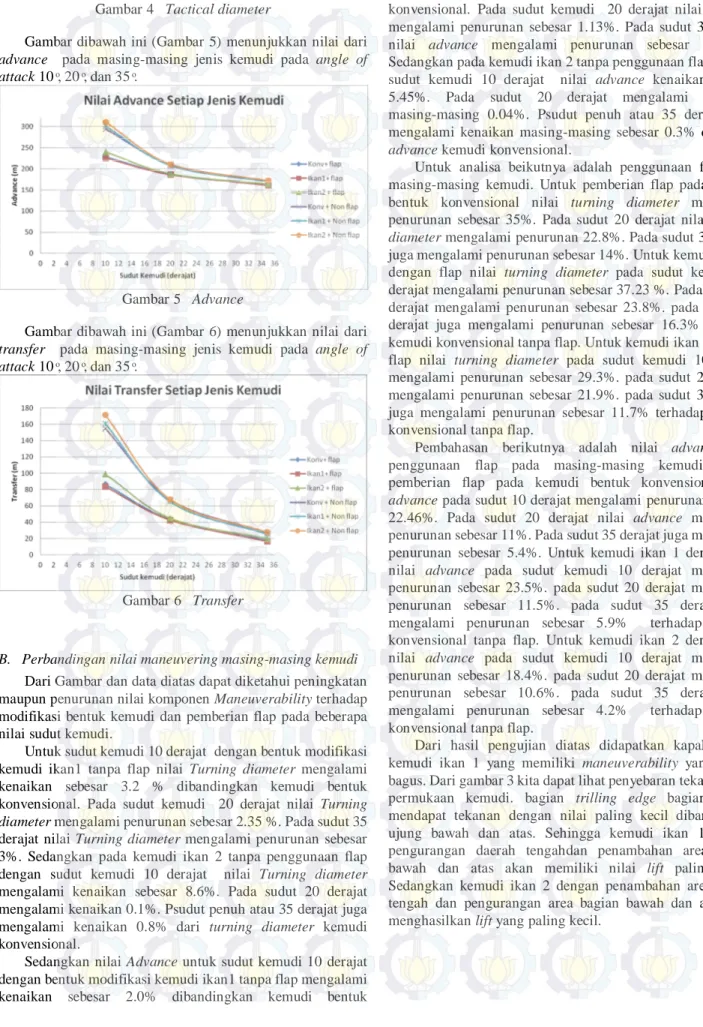
Gambar dibawah ini (Gambar 5) menunjukkan nilai dari advance pada masing-masing jenis kemudi pada angle of attack 10 ͦ, 20 ͦ, dan 35 ͦ.
Gambar 5 Advance
Gambar dibawah ini (Gambar 6) menunjukkan nilai dari transfer pada masing-masing jenis kemudi pada angle of attack 10 ͦ, 20 ͦ, dan 35 ͦ.
Gambar 6 Transfer
B. Perbandingan nilai maneuvering masing-masing kemudi Dari Gambar dan data diatas dapat diketahui peningkatan maupun penurunan nilai komponen Maneuverability terhadap modifikasi bentuk kemudi dan pemberian flap pada beberapa nilai sudut kemudi.
Untuk sudut kemudi 10 derajat dengan bentuk modifikasi kemudi ikan1 tanpa flap nilai Turning diameter mengalami kenaikan sebesar 3.2 % dibandingkan kemudi bentuk konvensional. Pada sudut kemudi 20 derajat nilai Turning diameter mengalami penurunan sebesar 2.35 %. Pada sudut 35 derajat nilai Turning diameter mengalami penurunan sebesar 3%. Sedangkan pada kemudi ikan 2 tanpa penggunaan flap dengan sudut kemudi 10 derajat nilai Turning diameter mengalami kenaikan sebesar 8.6%. Pada sudut 20 derajat mengalami kenaikan 0.1%. Psudut penuh atau 35 derajat juga mengalami kenaikan 0.8% dari turning diameter kemudi konvensional.
Sedangkan nilai Advance untuk sudut kemudi 10 derajat dengan bentuk modifikasi kemudi ikan1 tanpa flap mengalami kenaikan sebesar 2.0% dibandingkan kemudi bentuk
konvensional. Pada sudut kemudi 20 derajat nilai advance mengalami penurunan sebesar 1.13%. Pada sudut 35 derajat nilai advance mengalami penurunan sebesar 1.07 %. Sedangkan pada kemudi ikan 2 tanpa penggunaan flap dengan sudut kemudi 10 derajat nilai advance kenaikan sebesar 5.45%. Pada sudut 20 derajat mengalami kenaikan masing-masing 0.04%. Psudut penuh atau 35 derajat juga mengalami kenaikan masing-masing sebesar 0.3% dari nilai advance kemudi konvensional.
Untuk analisa beikutnya adalah penggunaan flap pada masing-masing kemudi. Untuk pemberian flap pada kemudi bentuk konvensional nilai turning diameter mengalami penurunan sebesar 35%. Pada sudut 20 derajat nilai turning diameter mengalami penurunan 22.8%. Pada sudut 35 derajat juga mengalami penurunan sebesar 14%. Untuk kemudi ikan 1 dengan flap nilai turning diameter pada sudut kemudi 10 derajat mengalami penurunan sebesar 37.23 %. Pada sudut 20 derajat mengalami penurunan sebesar 23.8%. pada sudut 35 derajat juga mengalami penurunan sebesar 16.3% terhadap kemudi konvensional tanpa flap. Untuk kemudi ikan 2 dengan flap nilai turning diameter pada sudut kemudi 10 derajat mengalami penurunan sebesar 29.3%. pada sudut 20 derajat mengalami penurunan sebesar 21.9%. pada sudut 35 derajat juga mengalami penurunan sebesar 11.7% terhadap kemudi konvensional tanpa flap.
Pembahasan berikutnya adalah nilai advance dari penggunaan flap pada masing-masing kemudi. Untuk pemberian flap pada kemudi bentuk konvensional nilai advance pada sudut 10 derajat mengalami penurunan sebesar 22.46%. Pada sudut 20 derajat nilai advance mengalami penurunan sebesar 11%. Pada sudut 35 derajat juga mengalami penurunan sebesar 5.4%. Untuk kemudi ikan 1 dengan flap nilai advance pada sudut kemudi 10 derajat mengalami penurunan sebesar 23.5%. pada sudut 20 derajat mengalami penurunan sebesar 11.5%. pada sudut 35 derajat juga mengalami penurunan sebesar 5.9% terhadap kemudi konvensional tanpa flap. Untuk kemudi ikan 2 dengan flap nilai advance pada sudut kemudi 10 derajat mengalami penurunan sebesar 18.4%. pada sudut 20 derajat mengalami penurunan sebesar 10.6%. pada sudut 35 derajat juga mengalami penurunan sebesar 4.2% terhadap kemudi konvensional tanpa flap.
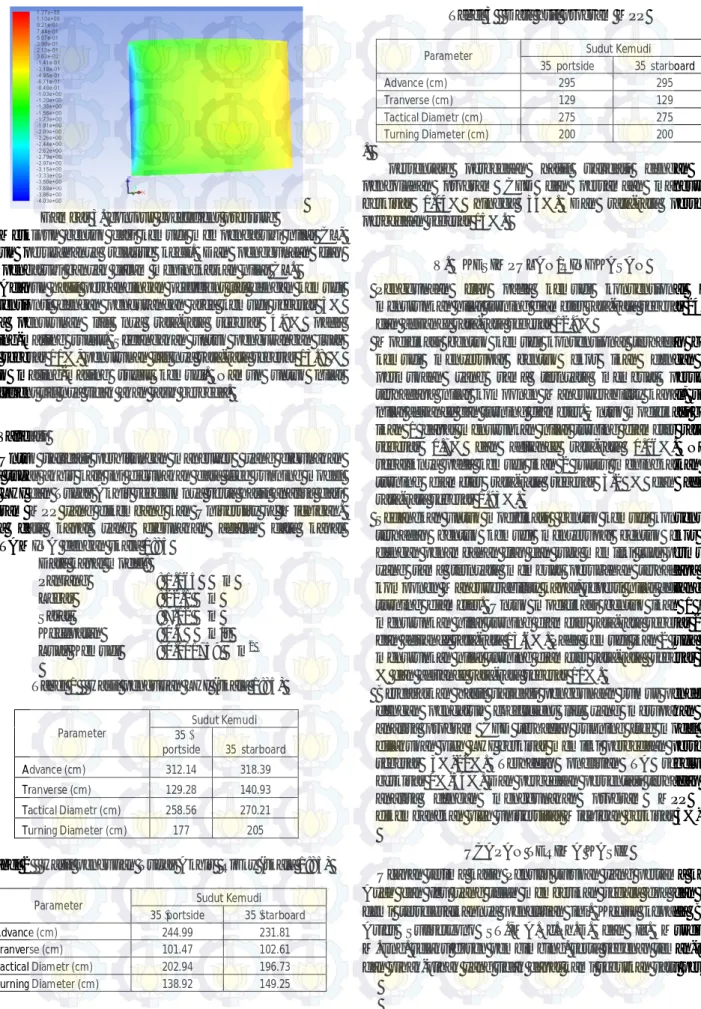
Dari hasil pengujian diatas didapatkan kapal dengan kemudi ikan 1 yang memiliki maneuverability yang paling bagus. Dari gambar 3 kita dapat lihat penyebaran tekanan pada permukaan kemudi. bagian trilling edge bagian tengah mendapat tekanan dengan nilai paling kecil dibandingkan ujung bawah dan atas. Sehingga kemudi ikan 1 dengan pengurangan daerah tengahdan penambahan area daerah bawah dan atas akan memiliki nilai lift paling besar. Sedangkan kemudi ikan 2 dengan penambahan area bagian tengah dan pengurangan area bagian bawah dan atas akan menghasilkan lift yang paling kecil.
Gambar 3. contour coefficient pressure
Meskipun bentuk dari kemudi mempengaruhi nilai CL, namun perubahanya relative kecil. Dan penggunaan flap mempengaruhi banyak dalam meningkatkan nilai CL.
Adapun hasil perbandingan oefficient lift dengan kemudi konvensionsl dengan pengurangan area kemudi sebesar 5% maka penurunan lift nya rata-rata sebesar 4.9% pada masing-masing sudut. Sedangakan untuk pengurangan luas area sebesar 11%, penurunan lift nya rata-rata sebesar 13.8 % untuk masing-masing sudut kemudi. Namun untuk nilai coefficient lift nya tidak akan jauh berbeda.
C. Validasi
Untuk validasi perhitungan maneuver yang digunakan pada tugas akhir kali ini digunakan data free running model dari LHI dan Tugas Akhir sebelumnya serta hasil analisa dari program MPP yang dikembang kan University of Michigan. Dana data kapal yang digunakan adalah data kapal PERTAMINA dengan skala 1:85
Data kapal model:
Panjang : 1.165 m
Lebar : 22.1 m
Sarat : 7.12 m
Kecepatan : 0.6 m/s Luas Kemudi : 0.001759 m2 Tabel 1 Hasil pengujian LHI (skala 1:85)
Parameter Sudut Kemudi 35 ͦ portside 35 ͦ starboard Advance (cm) 312.14 318.39 Tranverse (cm) 129.28 140.93 Tactical Diametr (cm) 258.56 270.21 Turning Diameter (cm) 177 205
Tabel 2 Hasil pengujian Tugas Akhir Rizky (skala 1:85)
Parameter Sudut Kemudi
35 ͦ portside 35 ͦ starboard
Advance (cm) 244.99 231.81
Tranverse (cm) 101.47 102.61
Tactical Diametr (cm) 202.94 196.73 Turning Diameter (cm) 138.92 149.25
Tabel 3 Data hsil program MPP
Parameter Sudut Kemudi
35 ͦ portside 35 ͦ starboard Advance (cm) 295 295 Tranverse (cm) 129 129 Tactical Diametr (cm) 275 275 Turning Diameter (cm) 200 200 .
persentase perbedaan hasil validasi dengan hasil pengolahan program CFD dan persamaan maneuvering berkisar 0.04% hingga 34%. Dan rata-rata persentase perbedaan sebesar 15%.
V. KESIMPULAN/RINGKASAN
Penggunaan flap pada kemudi konvensional dapat menurunkan nilai turning diameter rata-rata sebesar 24.48% dan advance rata-rata sebesar 12.9%
Modifikasi bentuk kemudi konvensional terhadap bentuk kemudi menyerupai bentuk ekor ikan dengan luas permukaan yang sama ternyata membuat perubahan terhadapa nilai komponen Maneuverability kapal, seperti nilai advance dan turning diameter. Untuk modifikasi bentuk ikan 1 dapat menurunkan nilai turning diameter rata-rata sebesar 0.7% dan advance rata-rata 0.06%. Namun sebaliknya pada kemudi ikan 2 justru meningkatkan nilai turning diameter rata-rata sebesar 3.2 % dan advance rata-rata sebesar 1.93%.
Sedangkan untuk modifikasi bentuk kemudi konvensional terhadap bentuk kemudi menyerupai bentuk ekor ikan dengan penambahan flap dan juga memilki luas permukaan yang sama ternyata membuat perubahan terhadapa nilai komponen Maneuverability kapal, seperti nilai advance dan turning diameter. Untuk modifikasi bentuk ikan 1 dapat menurunkan nilai turning diameter rata-rata sebesar 25.7% dan advance rata-rata 13.6%. Pada kemudi ikan 2 juga dapat menurunkan nilai turning diameter rata-rata sebesar 20.94 % dan advance rata-rata sebesar 11%.
Berdasarkan hasil validasi penggunaan rumus pendekatan dengan pengaruh coefficient lift yang merupakan hasil analisa program CFD terhadap running free model yang dilakukan oleh LHI berkisar memilki perbedaan persentase sebesar 3%-22%. Terhadap pnelitian TA sebelumnya berkisar 0%-34%. Dan perbedaan persentasi terhadap hasil analisa dengan menggunakan program MPP yang dikembangkan oleh universitas Michigan berkisar 5%-17%
UCAPAN TERIMA KASIH
Ucapan terima kasih Penulis tujukan yang pertama kepada Ayah dan Ibu yang telah memberikan segala doa dan biaya demi terselesaikannya penelitian ini. Kedua kepada Bapak Aries Sulisetyono ST.,MA.Sc.Ph.D. dan Ir. Murdjianto, M.Eng. selaku dosen pembimbing. serta segenap teman-teman dan pihak-pihak yang tidak dapat kami sebutkan satu per satu.
DAFTAR PUSTAKA
[1] ANSYS Fluent 12.0. Tutorial Guide. Modeling Periodic Flow and Heat Transfer.
[2] Burcher, R.K. (1971). Development in Ship Manoeuvrability. Trans RIN.
[3] Clarke, D., Gedling, P. and Hine, G. (1982). The Application of Manoeuvring Criteria in Hull Design Using Linear Theory. Proceedings of RINA Spring Meetings. London.
[4] Edward, V. Lewis. (Ed). (1989). Motion In Waves and Controllability. Priciples of Naval Architecture (Vol III). Jersey City.
[5] Harvald, Sv. As. (1978). Resistance and Propulsion of Ship. Jhon Wiley and Sons. New York.
[6] Hermansyah, Heru. (2008). TA. Modifikasi Daun Kemudi Tunggal (Konvensional) menjadi Daun Kemudi dengan Flap untuk Meningkatkan Meneuverability Kapal. Teknik Perkapalan. Institut Teknologi Sepuluh Nopember (ITS).
[7] Journee, J.M.J,. Pinkster, Jakob (2002). Lecture MT519. Introduction in Ship Hydromechanics. Delft University of Technology.
[8] Lyster C.A., and Knights, H.L. (1979). Prediction Equations for Ships' Turning Circles. Trans. NECIES. [9] Parsons, Michael.G., Li, Jun., Singer, David. (1998).
Michigan Conceptual Ship Design Software Environment. Departement of Naval Architecture and Marine Engineering. The University of Michigan. [10] Rawson, K.J., Tupper, E.C (2001). Manoueuvrability.
Basic Ship Teory (Vol 2)..
[11] Wardana, P.I.K. (2012). TA. Komparasi Daun Kemudi terhadap Gaya Belok dengan Pendekatan CFD. Teknik Perkapalan. Institut Teknologi Sepuluh Nopember (ITS). [12] Zaojian, Z. (2006). Lecture Notes. Ship Manoeuvring and