SIMULASI DAN PERANCANGAN KENDALI INKREMENTAL
ADAPTIF UNTUK MATRA LATERAL DIRECTIONAL PADA
RUDAL RKX-200TJ LAPAN
SKRIPSI
Agil Istiqomah 11150940000060
PROGRAM STUDI MATEMATIKA
FAKULTAS SAINS DAN TEKNOLOGI
UIN SYARIF HIDAYATULLAH JAKARTA
ii
PERANCANGAN DAN SIMULASI KENDALI INKREMENTAL
ADAPTIF UNTUK MATRA LATERAL DIREKSIONAL
PADA RUDAL RKX-200TJ LAPAN
SKRIPSI
Diajukan kepada Universitas Islam Negeri Syarif Hidayatullah Jakarta Fakultas Sains dan Teknologi untuk Memenuhi Persyaratan Memperoleh Gelar Sarjana
Matematika (S.Mat)
Oleh Agil Istiqomah 11150940000060
PROGRAM STUDI MATEMATIKA
FAKULTAS SAINS DAN TEKNOLOGI
UIN SYARIF HIDAYATULLAH JAKARTA
iii
PERNYATAAN
DENGAN INI SAYA MENYATAKAN BAHWA SKRIPSI INI BENAR-BENAR HASIL KARYA SENDIRI YANG BELUM PERNAH DIAJUKAN SEBAGAI SKRIPSI ATAU KARYA ILMIAH PADA PERGURUAN TINGGI ATAU LEMBAGA MANAPUN.
Jakarta, 25 Maret 2020
Agil Istiqomah NIM. 11150940000060
iv
LEMBAR PENGESAHAN
Skripsi ini berjudul “Perancangan dan Simulasi Kendali Inkremental Adaptif
untuk Matra Lateral Direksional pada Rudal RKX-200TJ LAPAN” yang
ditulis oleh Agil Istiqomah dengan NIM. 11150940000060 telah di uji dan dinyatakan lulus dalam sidang Munaqosah Fakultas Sains dan Teknologi Universitas Islam Negeri Syarif Hidayatullah Jakarta pada hari Kamis, 9 April 2020]. Skripsi ini telah di terima untuk memenuhi salah satu persyaratan dalam memperoleh gelar sarjana strata satu (S1) Program Studi Matematika.
Menyetujui,
Pembimbing I Pembimbing II
Idris Eko Putro, M.Sc.AE NIP. 19780507 200312 1 005
Dr. Suma’inna, M.Si
NIDN. 19791208 200701 2 015
Penguji I Penguji II
Dr. Nina Fitriyati, M. Kom NIP. 19760414 200604 2 001
Mahmudi, M. Si NIDN. 2029048801 Mengetahui,
Dekan Fakultas Sains dan Teknologi Ketua Program Studi Matematika
Prof. Dr. Lily Surraya E P, M.Env.Stud NIP. 19690404 2005012 005
Dr. Suma’inna, M.Si
v
PERSEMBAHAN
Skripsi ini saya persembahkan untuk Bapak Komari dan Ibu Sri Hartati
MOTTO
Dunia itu berputar, kadang posisi di atas kadang posisi di bawah, syukuri saja segala kondisinya, percayalah Allah itu Maha Adil
vi
KATA PENGANTAR
Assalamu’alaikum Warahmatullahi Wabarakatuh
Dengan menyebut nama Allah yang Maha pengasih lagi Maha Penyayang. Segala puji dan syukur penulis panjatkan atas kehadirat-Nya, yang telah memberikan nikmat iman, islam serta limpahan karunia dan hidayah-Nya. Shalawat serta salam tak lupa juga penulis curahkan kepada Baginda Nabi Besar Muhammad SAW, keluarga, sahabat serta kita sebagai umatnya.
Alhamdulillah, dengan segala kemudahan yang diberikan Allah SWT, penulis dapat melewati proses penyelesaian skripsi dengan judul “Perancangan
dan Simulasi Kendali Inkremental Adaptif untuk Matra Lateral Direksional pada Rudal RKX-200TJ LAPAN” secara baik. Adapun penyusunan skripsi ini
menjadi salah satu pemenuhan syarat yang wajib untuk penulis sebagai mahasiswa untuk mendapatkan gelar Sarjana Matematika yang kemudian di singkat S. Mat pada Fakultas Sains dan Teknologi Universitas Islam Negeri Syarif Hidayatullah Jakarta.
Dalam proses penyusunan skripsi ini penulis mendapatkan banyak ilmu-ilmu baru, bantuan serta dukungan dari berbagai pihak. Oleh karena itu, pada kesempatan kali ini penulis mengucapkan terima kasih kepada :
1. Prof. Dr. Lily Surraya E P, M.Env.Stud, selaku Dekan Fakultas Sains dan Teknologi Universitas Islam Negeri Syarif Hidayatullah Jakarta.
2. Dr. Suma’inna, M.Si, selaku Ketua Program Studi Matematika Fakultas Sains dan Teknologi Universitas Islam Negeri Syarif Hidayatullah Jakarta.
3. Irma Fauziah, M.Sc, selaku Sekretaris Program Studi Matematika sekaligus Dosen Pembimbing Akademik, terima kasih atas bimbingan, nasehat serta arahannya kepada penulis selama 8 semester ini.
4. Idris Eko Putro, M.Sc.AE, selaku Pembimbing I, terima kasih atas ilmu, bimbingan, bantuan serta arahan kepada penulis dari titik awal sampai akhir proses skripsi ini.
vii
5. Dr. Suma’inna, M. Si, selaku Pembimbing II, terima kasih atas saran dan arahannya selama penyusunan skripsi ini di buat.
6. Segenap jajaran Dosen Program Studi Matematika yang telah memberikan banyak ilmu dan pengalamannya kepada penulis selama kegiatan perkuliahan yang sangat bermanfaat.
7. Orang tua penulis Bapak Komari & Ibu Sri Hartati, terima kasih atas segala bentuk usaha dan doa yang tiada hentinya, untuk semangat dan dukungan baik secara moril dan materil yang diberikan sehingga penulis dapat diberikan kemudahan dalam penyusunan skripsi hingga selesai.
8. Kakak Imam Zaenal Arifin, Ali Anwar Ibrahim dan istrinya Ulfa Kurnia Tami yang telah memberikan doa, semangat serta dukungan baik secara materil sampai akhir sehingga penulis dapat melakukannya dengan baik.
9. Keluarga Mba Wati & Om Firman, serta anaknya Ridho Prasetio & Rimarsya Islamia Saputri selaku keluarga terdekat yang telah memberikan doa, semangat, serta dukungan kepada penulis.
10. Teman-teman Firda Rizkia Rahma, Sefilla Ghilda Ikhsani, Diaz Farahdiba, Rizki Dini Febri Anggraini, Nindita Nadilia yang telah memberikan dukungan positf baik doa, semangat dan waktunya kepada penulis dalam menghadapi suka duka dalam proses pengerjaan skripsi hingga selesai.
11. Teman terbaik Yaasir Naufal yang telah memberikan doa, dukungan dan waktunya untuk selalu siap setia mendengarkan keluhan penulis dalam segala kondisi selama proses pengerjaan skripsi berlangsung hingga selesai.
12. Segenap keluarga besar Matematika 2015, terima kasih telah mengisi waktu-waktu perkuliahan selama ini, terima kasih atas kebersamaannya, suka duka selama penulis mengenyam Pendidikan di UIN Jakarta.
13. Segenap keluarga Himpunan Mahasiswa Matematika (HIMATIKA) & Senat Mahasiswa Fakultas Sains dan Teknologi (SEMA-FST), terima kasih telah memberikan kesempatan kepada penulis untuk ikut jadi bagian dari kalian sehingga penulis mendapatkan banyak ilmu baru, pengalaman baru, dan juga keluarga baru selama mengenyam Pendidikan di UIN Jakarta.
viii
14. Seluruh pihak yang telah membantu penulis dalam penyelesaian kewajiban ini baik secara langsung ataupun tidak.
Untuk itu, penulis mengharapkan kritik dan saran dari berbagai pihak yang bersifat membangun demi terciptanya penelitian yang lebih baik lagi dimasa yang akan datang. Akhir kata, penulis berharap semoga skripsi ini dapat bermanfaat bagi banyak orang.
Jakarta, 25 Maret 2020
ix
LEMBAR PENYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS
Yang bertanda tangan dibawah ini :
Nama : Agil Istiqomah
NIM : 11150940000060
Program Studi : Matematika Fakultas Sains dan Teknologi
Demi pengembangan ilmu pengetahuan, saya menyetujui untuk memberikan Hak
Bebas Royalti Non-Eksklusif (Non-Exclusive-Free Right) kepada Program Studi
Matematika Fakultas Sains dan Teknologi UIN Syarif Hidayatullah Jakarta atas karya ilmiah saya yang berjudul :
“Perancangan dan Simulasi Kendali Inkremental Adaptif untuk Matra Lateral Direksional pada Rudal RKX-200TJ LAPAN”
beserta perangkat yang diperlukan (bila ada). Dengan Hak Bebas Royalti Non-Eksklusif ini, Program Studi Matematika Fakultas Sains dan Teknologi UIN Syarif Hidayatullah Jakarta berhak menyimpan, mengalihmedia/formatkan, mengelolanya dalam bentuk pangkalan data (database), mendistribusikannya, dan menampilkan/mempublikasikannya di internet dan media lain untuk kepentingan akademis tanpa perlu meminta izin dari saya selama tetap mencantumkan nama saya sebagai penulis/pencipta dan sebagai pemilik Hak Cipta. Segala bentuk tuntutan hukum yang timbul atas pelanggaran Hak Cipta karya ilmiah ini menjadi tanggungjawab saya sebagai penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya.
Di buat di Tangerang Selatan Pada tanggal : 9 April 2020
Yang membuat pernyataan,
x
ABSTRAK
Agil Istiqomah, Perancangan dan Simulasi Kendali Inkremental Adaptif untuk
Matra Lateral Direksional pada Rudal RKX-200TJ LAPAN, di bawah bimbingan
Idris Eko Putro, M.Sc.AE. dan Dr. Suma’inna, M.Si.
Skripsi ini membahas perancangan dan simulasi model nonlinear kendali pergerakan Rudal RKX berdasarkan persamaan 6 derajat kebebasan yaitu tiga gerakan rotasi dan tiga gerakan translasi. Tahapan pada skripsi ini yaitu linearisasi model menggunakan pendekatan small perturbation. Kemudian parameter-parameter model diperoleh dari sistem DATCOM. Model di simulasi berdasarkan sikap terbang berguling dan berbelok. Pada simulasi ini dilihat bagaimana perilaku sistem dinamik yang menggunakan kendali inkremental adaptif dan tanpa adaptif. Selain itu dilakukan penambahan dinamika aktuator untuk memperoleh perilaku sistem yang lebih menyesuaikan keadaan aslinya. Untuk bisa mengendalikan perilaku sistem dalam menghadapi permasalahan terkait miss match parameter dan juga adanya gangguan di luar perencanaan, maka ditambahkan pengendalian inkremental adaptif. Kendali ini didapatkan dari analisis kestabilan Lyapunov. Dalam pengendalian ini diberikan sistem referensi (sistem ideal) yang digunakan sistem dinamik sebagai acuan untuk mengetahui kestabilan sistem. Hasil dari simulasi ini diperoleh sinyal sistem yang stabil serta mampu mengikuti model referensi yang diberikan. Dengan bertambahnya waktu, error yang terjadi antara sistem dinamik dengan sistem referensi semakin kecil. Ini menunjukan bahwa sistem dinamik mampu beradaptasi dengan segala gangguan dengan meminimalkan error yang ada sehingga mampu mengikuti model referensi dengan baik.
xi
ABSTRACT
Agil Istiqomah, Design and Simulation of Adaptive Incremental Control for
Directional Lateral Matrix on the LAPAN RKX-200TJ Missile, Supervised by Idris Eko Putro, M.Sc.AE. dan Dr. Suma’inna, M.Si.
This thesis discusses is about the design and simulation of a non-linear control model of the RKX missile movement based on the equation of 6 degrees of freedom namely three rotational movements and three translational movements. First, we linearize the model using a small perturbation approach. Then the model parameters are obtained from the DATCOM system. Then the model is simulated based on the attitude of roll angle and yaw angle. Next, we apply computer simulation to the model to see how dynamic system behavior using adaptive and non-adaptive incremental controls. In addition, the dynamics of the actuator will be added to obtain the behavior of the system that better adjusts to its original state. To be able to control the behavior of the system in dealing with problems related to miss match parameters and also interference outside planning, adaptive incremental control will be added. This control is obtained from Lyapunov's stability analysis. In this control will be given a reference system (ideal system) that is used by dynamic systems as a reference to obtain stability. The results of this simulation are obtained by a stable system signal and are able to follow the reference model given. With increasing time, the error that occurs between the dynamic system with a reference system gets smaller. This shows that dynamic systems are able to adapt to all disturbances by minimizing errors that exist so that they are able to follow the reference model well.
xii DAFTAR ISI
PERANCANGAN DAN SIMULASI KENDALI INKREMENTAL ADAPTIF UNTUK MATRA LATERAL DIREKSIONAL PADA RUDAL RKX-200TJ
LAPAN ... ii PERNYATAAN ... iii LEMBAR PENGESAHAN ... iv PERSEMBAHAN ... v MOTTO ... v KATA PENGANTAR ... vi
LEMBAR PENYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... ix
ABSTRAK ... x
ABSTRACT ... xi
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xv
DAFTAR SIMBOL ... xvii
BAB I PENDAHULUAN ... 1 1.1 Latar Belakang ... 1 1.2 Rumusan Masalah ... 3 1.3 Tujuan Penelitian ... 3 1.4 Batasan Masalah... 4 1.5 Manfaat Penelitian ... 4
BAB II LANDASAN TEORI ... 5
2.1 Pemodelan Matematis ... 5
xiii
B. Sumbu Badan (Body axes) ... 5
C. Sudut Serang Angin ... 6
D. Sudut Kendali Permukaan Rudal ... 7
E. Sikap Terbang Lateral Direksional ... 8
2.1.1 Persamaan Gerak 6 Derajat Kebebasan ... 10
2.1.1.1 Persamaan Gaya ... 10
2.1.1.2 Persamaan Momen ... 13
2.1.1.3 Persamaan Kinematik Rotasi ... 16
2.2 Perancangan Sistem Kendali ... 17
2.2.1 Poles dan Zeros ... 17
2.2.2 Pole Placement... 19
2.2.3 Dinamika Aktuator ... 21
2.2.4 Inkremental ... 22
2.2.5 Kendali Adaptif ... 25
2.3 Analisa Kestabilan ... 27
2.3.1 Teori Kestabilan Lyapunov ... 27
2.3.2 Teorema untuk Kestabilan pada Sistem Autonomous : Metode Langsung Lyapunov ... 28
BAB III METODOLOGI PENELITIAN ... 31
3.1 Sumber Data ... 31
3.2 Pengolahan Data... 31
3.3 Alur Penelitian ... 32
BAB IV PERANCANGAN MODEL DAN SIMULASI ... 33
4.1 Linearisasi Sikap Terbang Lateral Direksional ... 33
xiv
4.1.2 Linearisasi Gangguan pada Faktor Control (Kendali) ... 46
4.1.3 Linearisasi Gangguan pada Faktor Propulsion (Gaya Dorong) ... 48
4.1.4 Teori Tambahan Terkait Sudut Serang Angin ... 51
4.1.5 Linearisasi Gangguan pada Sudut atau Euler Angles ... 53
4.2 Model linear Lateral Direksional Rudal RKX-200 TJ LAPAN... 54
4.3 Perancangan Kendali Adaptif MRAC ... 55
4.4 Perancangan Sistem Kendali ... 60
4.4.1 Pengujian Baseline Controller ... 60
4.4.2 Penambahan Dinamika Aktuator ... 66
4.4.3 Analisis Kendali Inkremental ... 69
4.4.4 Analisis Kendali Inkremental Adaptif ... 71
4.4.5 Perbandingan Kendali Baseline Controller dengan Kendali Inkremental adaptif dalam mengatasi gangguan ... 77
BAB V KESIMPULAN DAN SARAN ... 81
5.1 Kesimpulan ... 81
5.2 Saran ... 82
DAFTAR REFERENSI ... 83
xv
DAFTAR GAMBAR
Gambar 2.1 Sumbu Bumi pada Rudal Terbang ... 5
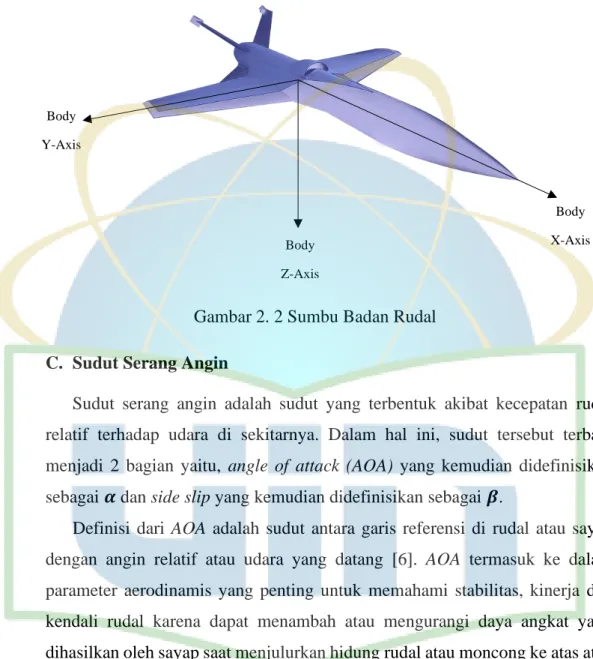
Gambar 2. 2 Sumbu Badan Rudal ... 6
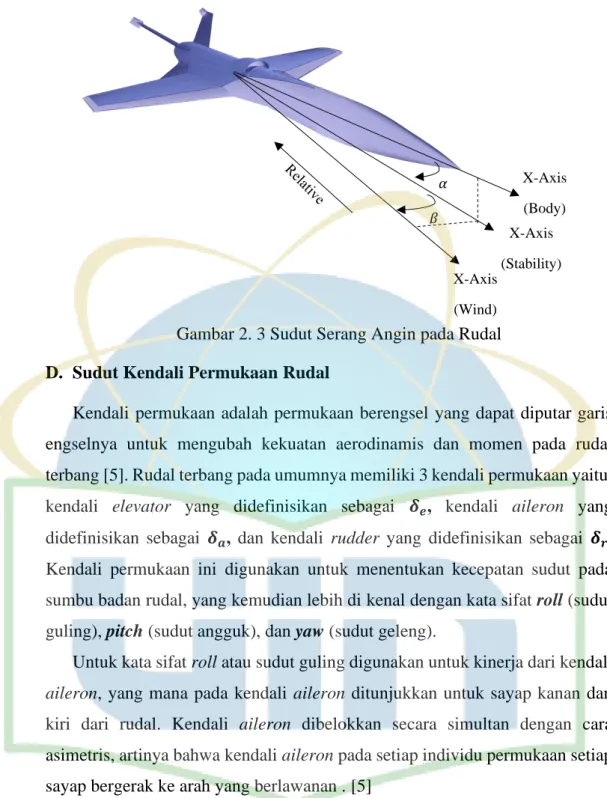
Gambar 2. 3 Sudut Serang Angin pada Rudal ... 7
Gambar 2. 4 Kendali Permukaan Rudal ... 8
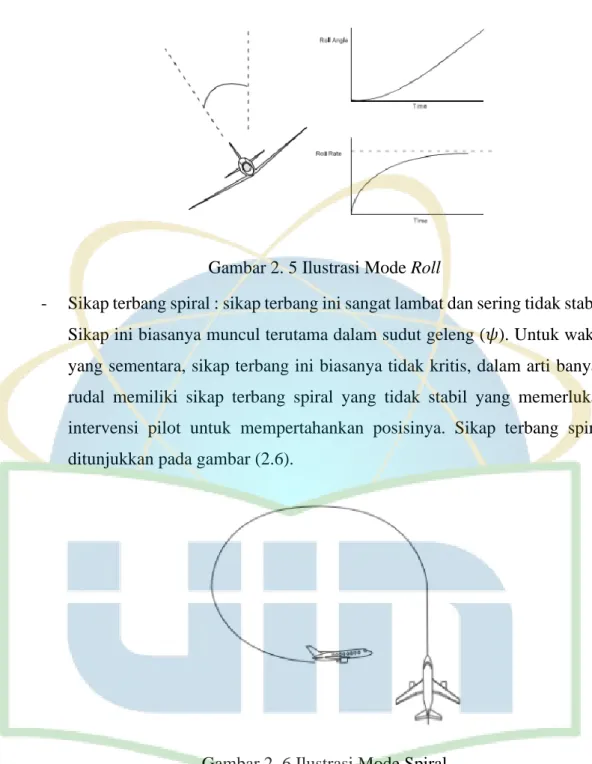
Gambar 2. 5 Ilustrasi Mode Roll ... 9
Gambar 2. 6 Ilustrasi Mode Spiral ... 9
Gambar 2. 7 Ilustrasi Mode Dutch Roll ... 10
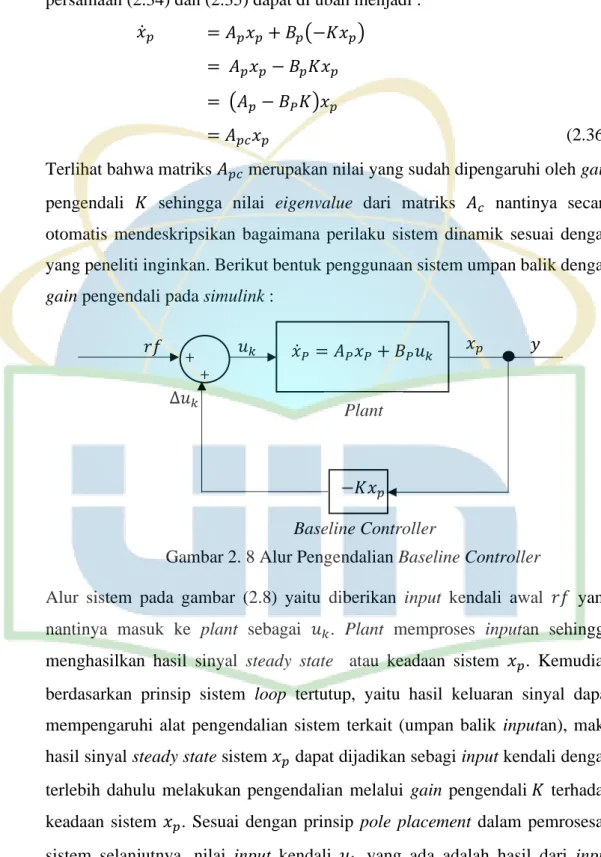
Gambar 2. 8 Alur Pengendalian Baseline Controller ... 20
Gambar 2. 9 Alur Penggunaan Dinamika Aktuator pada Sistem ... 21
Gambar 2. 10 Alur Pengendalian dengan Menggunakan Dinamika Aktuator ... 22
Gambar 2. 11 Alur Pengendalian dengan Kendali Inkremental ... 24
Gambar 2. 12 Alur Pengendalian dengan Penambahan Kendali Inkremental Adaptif ... 26
Gambar 3. 1 Alur Penelitian ………..32
Gambar 4. 1 Macam Kondisi Terbang Rudal pada Umumnya………..33
Gambar 4. 2 Kondisi Terbang Cruise Plane Flight ... 34
Gambar 4. 3 Hubungan Sudut Serang Angin dengan Nilai Kecepatan Gerak Translasi Rudal... 51
Gambar 4. 4 Rangkaian Blok Sistem Plant ... 60
Gambar 4. 5 Rangkaian Blok Sistem Dinamik ... 61
Gambar 4. 6 Hasil Sinyal Keluaran Sistem Dinamik (2.34) ... 62
Gambar 4. 7 Pole Zero Map Model Linear ... 63
Gambar 4. 8 Pole Zero Map Hasil Pole Placement ... 64
Gambar 4. 9 Rangkaian Blok Baseline Controller ... 64
Gambar 4. 10 Rangkain Blok Sistem Dinamik dengan Penambahan Baseline Controller ... 65
Gambar 4. 11 Hasil Sinyal Keluaran Sistem Dinamik dengan Baseline Controller ... 65
xvi
Gambar 4. 12 Perbandingan sinyal step dengan nilai 𝜏 = 1/2, 𝜏 = 1/5, 𝜏 = 1/7
... 66
Gambar 4. 13 Rangkaian Blok Sistem Dinamik dengan Penambahan Aktuator .. 67
Gambar 4. 14 Perbandingan Hasil Sinyal Simulasi antara Model dengan atau Tanpa Aktuator ... 68
Gambar 4. 15 Perbesaran Hasil Sinyal Simulasi antara Model dengan atau Tanpa Aktuator ... 68
Gambar 4. 16 Blok Dellay ... 69
Gambar 4. 17 Rangkaian Blok Sistem Dinamik dengan Penambahan Kendali Inkremental ... 70
Gambar 4. 18 Perbandingan Hasil Sinyal Simulasi antara Model dengan atau Tanpa Kendali Inkremental ... 70
Gambar 4. 19 Rangkaian Blok Sistem Referensi (4.47) ... 72
Gambar 4. 20 Rangkaian Blok Parameter Kendali Adaptif ... 73
Gambar 4. 21 Rangkaian Blok Kendali Adaptif ... 74
Gambar 4. 22 Rangkaian Blok Sistem Dinamik dengan penambahan Kendali Inkremental Adaptif ... 75
Gambar 4. 23 Hasil Sinyal Keluaran Sistem Dinamik dengan Kendali Inkremental Adaptif ... 76
Gambar 4. 24 Rangkaian Blok Disturbance ... 78
Gambar 4. 25 Rangkaian Blok Sistem Plant dengan Penambahan Blok Disturbance ... 78
Gambar 4. 26 (a) Hasil Sinyal Baseline Controller dengan Penambahan Disturbance (b) Hasil Sinyal Kendali Inkremental Adaptif dengan Penambahan Disturbance ... 79
xvii
DAFTAR SIMBOL
A
𝛼 = Sudut Angle of attack
𝐴𝑀 = Matriks state sistem referensi
𝐴 = Gaya aksial atau gaya aerodinamik pada sumbu 𝑥
𝐴0 = Nominal konstan pada persamaan aerodinamik 𝐴 dalam kondisi kestabilan
𝐴𝑝 = Matriks state sistem plant B
𝛽 = Sudut Side slip 𝑏 = Rentang sayap
𝐵𝑝 = Matriks input sistem plant 𝐵𝑀 = Matriks input sistem referensi C
𝐶𝑥 = Koefisien aerodinamik yang bekerja pada sumbu 𝑥
𝐶𝑦 = Koefisien aerodinamik yang bekerja pada sumbu 𝑦 𝐶𝑧 = Koefisien aerodinamik yang bekerja pada sumbu 𝑧 𝑐. 𝑔 = Center of gravitation
𝑐̅ = Rata rata panjang chord aerodinamik sayap ∁ = Persamaan defleksi kendali
∁0 = Nominal konstan pada persamaan defleksi kendali ∁ dalam
kondisi kestabilan D
𝛿𝑎 = Defleksi permukaan bidang kendali aileron 𝛿𝑒 = Defleksi permukaan bidang kendali elevator 𝛿𝑟 = Defleksi permukaan bidang kendali rudder
𝐷(𝑠) = Denumerator
∆𝑢𝑘 = Perubahan input kendali
xviii
𝑑 = Faktor disturbance
𝜕𝑋 = Perubahan nilai gerak translasi pada sumbu 𝑥 akibat diberikan gangguan
𝜕𝑌 = Perubahan nilai gerak translasi pada sumbu 𝑦 akibat diberikan gangguan
𝜕𝑍 = Perubahan nilai gerak translasi pada sumbu 𝑧 akibat diberikan gangguan
𝜕𝐿 = Perubahan nilai momen pada sumbu 𝑥 akibat diberikan gangguan
𝜕𝑀 = Perubahan nilai momen pada sumbu 𝑦 akibat diberikan gangguan
𝜕𝑁 = Perubahan nilai momen pada sumbu 𝑧 akibat diberikan gangguan
E
𝑒𝑐𝑡 = Tracking error dalam bentuk transpose 𝑒𝑐 sebagai tracking error
F
𝐹 = Gaya translasi
𝐹𝑥 = Gaya translasi terhadap sumbu x
𝐹𝑦 = Gaya translasi terhadap sumbu y 𝐹𝑧 = Gaya translasi terhadap sumbu z 𝐹𝐴 = Gaya aerodinamis
𝐹𝐺 = Gaya gravitasi 𝐹𝑇 = Gaya dorong
𝑓𝑥(𝑎, 𝑏) = Turunan pertama terhadap x
𝑓𝑦(𝑎, 𝑏) = Turunan pertama terhadap y
𝑓𝑥𝑥(𝑎, 𝑏) = Turunan kedua x dari turunan pertama terhadap x 𝑓𝑥𝑦(𝑎, 𝑏) = Turunan kedua y dari turunan pertama terhadap x,
𝑓𝑦𝑦(𝑎, 𝑏) = Turunan kedua y dari turunan pertama terhadap y
xix
𝑔 = Gravitasi
𝑔𝑥 = Gaya gravitasi yang berada pada sumbu 𝑥 𝑔𝑦 = Gaya gravitasi yang berada pada sumbu 𝑦
𝑔𝑧 = Gaya gravitasi yang berada pada sumbu 𝑧 H
𝐻(𝑠) = Fungsi transfer / hasil bagi antara denumerator dan numerator I
𝐼 = Matriks Momen Inersia
𝐼𝑥 = Momen Inersia terhadap sumbu x
𝐼𝑥𝑦 = Momen Inersia terhadap sumbu x dan sumbu y 𝐼𝑥𝑧 = Momen Inersia terhadap sumbu x dan sumbu z
𝐼𝑦 = Momen Inersia terhadap sumbu y
𝐼𝑦𝑥 = Momen Inersia terhadap sumbu y dan sumbu x 𝐼𝑦𝑧 = Momen Inersia terhadap sumbu y dan sumbu z
𝐼𝑧 = Momen Inersia terhadap sumbu z
𝐼𝑧𝑥 = Momen Inersia terhadap sumbu z dan sumbu x 𝐼𝑧𝑦 = Momen inersia terhadap sumbu z dan sumbu y J
𝑗 = Lokasi poles yang diinginkan K
𝐾 = Gain pengendali L
𝐿 = Momen pada sumbu 𝑥
𝐿0 = Momen pada sumbu 𝑥 ketika 𝑡 = 0,
𝐿𝐴 = Nilai perubahan momen sumbu 𝑥 yang diakibatkan gangguan
parameter aerodinamik
𝐿∁ = Nilai perubahan momen sumbu 𝑥 yang diakibatkan gangguan pada bidang kendali
𝐿𝑝 = Perubahan nilai momen pada sumbu 𝑥 yang diakibatkan oleh perubahan nilai kecepatan sudut guling
xx
𝐿𝑞 = Perubahan nilai momen pada sumbu 𝑥 yang diakibatkan oleh perubahan nilai kecepatan sudut angguk
𝐿𝑟 = Perubahan nilai momen pada sumbu 𝑥 yang diakibatkan oleh perubahan nilai kecepatan sudut geleng
𝐿𝑢 = Perubahan nilai momen pada sumbu 𝑥 yang diakibatkan oleh
perubahan nilai kecepatan gerak translasi pada sumbu 𝑥
𝐿𝑣 = Perubahan nilai momen pada sumbu 𝑥 yang diakibatkan oleh perubahan nilai kecepatan gerak translasi pada sumbu 𝑦
𝐿𝑤 = Perubahan nilai momen pada sumbu 𝑥 yang diakibatkan oleh perubahan nilai kecepatan gerak translasi pada sumbu 𝑧
𝐿𝑝̇ = Perubahan nilai momen pada sumbu 𝑥 yang diakibatkan oleh
perubahan nilai percepatan sudut guling
𝐿𝑞̇ = Perubahan nilai momen pada sumbu 𝑥 yang diakibatkan oleh perubahan nilai percepatan sudut angguk
𝐿𝑟̇ = Perubahan nilai momen pada sumbu 𝑥 yang diakibatkan oleh perubahan nilai percepatan sudut geleng
𝐿𝑢̇ = Perubahan nilai momen pada sumbu 𝑥 yang diakibatkan oleh
perubahan nilai percepatan gerak translasi pada sumbu 𝑥 𝐿𝑣̇ = Perubahan nilai momen pada sumbu 𝑥 yang diakibatkan oleh
perubahan nilai percepatan gerak translasi pada sumbu 𝑦 𝐿𝑤̇ = Perubahan nilai momen pada sumbu 𝑥 yang diakibatkan oleh
perubahan nilai percepatan gerak translasi pada sumbu 𝑧 𝐿𝛿𝑒 = Perubahan nilai momen pada sumbu 𝑥 yang diakibatkan oleh
perubahan gerak defleksi permukaan bidang kendali elevator 𝐿𝛿𝑎 = Perubahan nilai momen pada sumbu 𝑥 yang diakibatkan oleh
perubahan gerak defleksi permukaan bidang kendali aileron 𝐿𝛿𝑟 = Perubahan nilai momen pada sumbu 𝑥 yang diakibatkan oleh
perubahan gerak defleksi permukaan bidang kendali rudder M
xxi
𝑀 = Momen
𝑀𝑥 = Momen terhadap sumbu x 𝑀𝑦 = Momen terhadap sumbu y
𝑀𝑧 = Momen terhadap sumbu z
𝑀𝐴 = Momen yang timbul akibat gaya aerodinamik 𝑀𝑇 = Momen yang timbul akibat gaya dorong
𝑀0 = Momen pada sumbu 𝑦 ketika 𝑡 = 0
𝑀𝐴 = Nilai perubahan momen sumbu 𝑦 yang diakibatkan perubahan parameter aerodinamik
𝑀∁ = Nilai perubahan momen sumbu 𝑦 yang diakibatkan gangguan
pada bidang kendali
𝑀𝑃 = Nilai perubahan momen sumbu 𝑦 yang diakibatkan gangguan pada propulsion atau gaya dorong
𝑀𝑝 = Perubahan nilai momen pada sumbu 𝑦 yang diakibatkan oleh perubahan nilai kecepatan sudut guling
𝑀𝑞 = Perubahan nilai momen pada sumbu 𝑦 yang diakibatkan oleh
perubahan nilai kecepatan sudut angguk
𝑀𝑟 = Perubahan nilai momen pada sumbu 𝑦 yang diakibatkan oleh
perubahan nilai kecepatan sudut geleng
𝑀𝑢 = Perubahan nilai momen pada sumbu 𝑦 yang diakibatkan oleh perubahan nilai kecepatan gerak translasi pada sumbu 𝑥
𝑀𝑣 = Perubahan nilai momen pada sumbu 𝑦 yang diakibatkan oleh
perubahan nilai kecepatan gerak translasi pada sumbu 𝑦
𝑀𝑤 = Perubahan nilai momen pada sumbu 𝑦 yang diakibatkan oleh
perubahan nilai kecepatan gerak translasi pada sumbu 𝑧
𝑀𝑝̇ = Perubahan nilai momen pada sumbu 𝑦 yang diakibatkan oleh perubahan nilai percepatan sudut guling
𝑀𝑞̇ = Perubahan nilai momen pada sumbu 𝑦 yang diakibatkan oleh
xxii
𝑀𝑟̇ = Perubahan nilai momen pada sumbu 𝑦 yang diakibatkan oleh perubahan nilai percepatan sudut geleng
𝑀𝑢̇ = Perubahan nilai momen pada sumbu 𝑦 yang diakibatkan oleh perubahan nilai percepatan gerak translasi pada sumbu 𝑥 𝑀𝑣̇ = Perubahan nilai momen pada sumbu 𝑦 yang diakibatkan oleh
perubahan nilai percepatan gerak translasi pada sumbu 𝑦 𝑀𝑤̇ = Perubahan nilai momen pada sumbu 𝑦 yang diakibatkan oleh
perubahan nilai percepatan gerak translasi pada sumbu 𝑧 𝑀𝛿𝑎 = Perubahan nilai momen pada sumbu 𝑦 yang diakibatkan oleh
perubahan gerak defleksi permukaan bidang kendali aileron 𝑀𝛿𝑟 = Perubahan nilai momen pada sumbu 𝑦 yang diakibatkan oleh
perubahan gerak defleksi permukaan bidang kendali rudder 𝑀𝛿𝑒 = Perubahan nilai momen pada sumbu 𝑦 yang diakibatkan oleh
perubahan gerak defleksi permukaan bidang kendali elevator N
𝑁(𝑠) = Numerator
𝑁𝐴 = Nilai perubahan momen sumbu 𝑧 yang diakibatkan perubahan
parameter aerodinamik
𝑁∁ = Nilai perubahan momen sumbu 𝑧 yang diakibatkan gangguan pada bidang kendali
𝑁𝑃 = Nilai perubahan momen sumbu 𝑧 yang diakibatkan gangguan pada propulsion atau gaya dorong
𝑁𝑝 = Perubahan nilai momen pada sumbu 𝑧 yang diakibatkan oleh perubahan nilai kecepatan sudut guling
𝑁0 = Momen pada sumbu 𝑧 ketika 𝑡 = 0
𝑁𝑞 = Perubahan nilai momen pada sumbu 𝑧 yang diakibatkan oleh perubahan nilai kecepatan sudut angguk
𝑁𝑟 = Perubahan nilai momen pada sumbu 𝑧 yang diakibatkan oleh perubahan nilai kecepatan sudut geleng
xxiii
𝑁𝑢 = Perubahan nilai momen pada sumbu 𝑧 yang diakibatkan oleh perubahan nilai kecepatan gerak translasi pada sumbu 𝑥
𝑁𝑣 = Perubahan nilai momen pada sumbu 𝑧 yang diakibatkan oleh
perubahan nilai kecepatan gerak translasi pada sumbu 𝑦
𝑁𝑤 = Perubahan nilai momen pada sumbu 𝑧 yang diakibatkan oleh
perubahan nilai kecepatan gerak translasi pada sumbu 𝑧
𝑁𝑝̇ = Perubahan nilai momen pada sumbu 𝑧 yang diakibatkan oleh perubahan nilai percepatan sudut guling
𝑁𝑞̇ = Perubahan nilai momen pada sumbu 𝑧 yang diakibatkan oleh
perubahan nilai percepatan sudut angguk
𝑁𝑟̇ = Perubahan nilai momen pada sumbu 𝑧 yang diakibatkan oleh
perubahan nilai percepatan sudut geleng
𝑁𝑢̇ = Perubahan nilai momen pada sumbu 𝑧 yang diakibatkan oleh perubahan nilai percepatan gerak translasi pada sumbu 𝑥 𝑁𝑣̇ = Perubahan nilai momen pada sumbu 𝑧 yang diakibatkan oleh
perubahan nilai percepatan gerak translasi pada sumbu 𝑦 𝑁𝑤̇ = Perubahan nilai momen pada sumbu 𝑧 yang diakibatkan oleh
perubahan nilai percepatan gerak translasi pada sumbu 𝑧 𝑁𝛿𝑒 = Perubahan nilai momen pada sumbu 𝑧 yang diakibatkan oleh
perubahan gerak defleksi permukaan bidang kendali elevator 𝑁𝛿𝑎 = Perubahan nilai momen pada sumbu 𝑧 yang diakibatkan oleh
perubahan gerak defleksi permukaan bidang kendali aileron 𝑁𝛿𝑟 = Perubahan nilai momen pada sumbu 𝑧 yang diakibatkan oleh
perubahan gerak defleksi permukaan bidang kendali rudder P
𝑝 = Kecepatan sudut guling 𝜌 = Kepadatan udara
𝑝̇ = Percepatan sudut guling 𝜙 = Sudut guling
xxiv
𝜙̇ = Kecepatan sudut guling 𝜓̇ = Kecepatan sudut geleng 𝑝𝑖 = Akar ciri dari denumerator
𝑃 = Matriks solusi penurunan persamaan lyapunov 𝑝0 = Kecepatan sudut guling ketika 𝑡 = 0
𝑝 ̌ = Perubahan nilai kecepatan sudut guling akibat diberikan gangguan
𝜙0 = Sudut guling ketika 𝑡 = 0
𝜓0 = Sudut geleng ketika 𝑡 = 0
𝜙̌ = Perubahan nilai sudut guling akibat diberikan gangguan 𝜓̌ = perubahan nilai sudut geleng akibat diberikan gangguan Q
𝑞 = Kecepatan sudut angguk 𝑞̅ = Tekanan aerodinamik 𝑞̇ = Percepatan sudut angguk
𝑞0 = Kecepatan sudut angguk ketika 𝑡 = 0
𝑞̌ = Perubahan nilai kecepatan sudut angguk akibat diberikan gangguan
R
𝑟 = Kecepatan sudut geleng 𝑟̇ = Percepatan sudut geleng 𝑟𝑓 = Input kendali awal
𝑟0 = Kecepatan sudut geleng ketika 𝑡 = 0
𝑟̌ = Perubahan nilai kecepatan sudut geleng akibat diberikan gangguan
S
𝑆 = Luas area sayap
𝑠 = Variabel terikat pada fungsi kompleks 𝜎 = Nilai real pada 𝑠
xxv
𝑇 = Gaya dorong 𝜃 = Sudut angguk
𝜃̇ = Kecepatan sudut angguk
𝜃̇𝑥𝑇𝑝 = Parameter adaptif terhadap state sistem plant
𝜃̇𝑟𝑓𝑇 = Parameter adaptif terhadap input sistem referensi 𝜃̃𝑥𝑝 = Parameter error sistem dinamik
𝜃𝑥𝑝∗ = Parameter kendali ideal sistem plant
𝜃𝑟𝑓∗ = Parameter kendali ideal sistem referensi 𝜃𝑑∗ = Parameter kendali ideal terhadap gangguan 𝜃̂𝑥𝑝∗ = Prediksi parameter kendali sistem plant 𝜃̂𝑟𝑓∗ = Prediksi parameter kendali sistem referensi 𝜃̃𝑟𝑓 = Parameter error sistem referensi
Tr = Trace dari suatu matriks persegi 𝜃0 = Sudut angguk ketika 𝑡 = 0
𝜃̌ = Perubahan nilai sudut angguk akibat diberikan gangguan U
𝑢 = Kecepatan translasi terhadap x 𝑢̇ = Percepatan translasi terhadap x 𝑢𝑘 = Input kendali
𝑢𝑘0 = Input kendali inkremental
𝑢0 = Kecepatan translasi terhadap 𝑥 ketika 𝑡 = 0
𝑢̌ = Perubahan nilai kecepatan translasi terhadap 𝑥 akibat diberikan gangguan
𝑢𝑘𝑐 = Input kendali adaptif V
𝑉 = Kecepatan translasi
𝑣 = Kecepatan translasi terhadap y 𝑣̇ = Percepatan translasi terhadap y 𝑉(𝑥) = Fungsi lyapunov
xxvi
𝑉̇(𝑥) = Turunan fungsi lyapunov
𝑣0 = Kecepatan translasi terhadap 𝑦 ketika 𝑡 = 0
𝑣̌ = Perubahan nilai kecepatan translasi terhadap 𝑦 akibat diberikan gangguan
𝑉𝑎 = Kecepatan udara W
𝑤 = Kecepatan translasi terhadap z 𝜔 = Kecepatan sudut
𝑤̇ = Percepatan translasi terhadap z 𝓌 = Nilai imajiner dari s
𝑤0 = Kecepatan translasi terhadap 𝑧 ketika 𝑡 = 0
𝑤̌ = Perubahan nilai kecepatan translasi terhadap 𝑧 akibat diberikan gangguan
X
𝑥̇𝑝 = Sistem dinamik plant
𝑥𝑝 = Matriks steady state atau keadaan sistem
𝑥̇𝑝(𝑡0) = Sistem dinamik terkait ketika 𝑡 = 0
𝑥̇𝑀 = Sistem referensi
𝑥𝑀 = Matriks steady state atau keadaan sistem referensi 𝑋 = Gerak translasi pada sumbu 𝑥
𝑋0 = Gerak translasi pada sumbu 𝑥 ketika 𝑡 = 0
𝑋𝐴 = Nilai perubahan gerak translasi sumbu 𝑥 yang diakibatkan perubahan parameter aerodinamik
𝑋∁ = Nilai perubahan gerak translasi sumbu 𝑥 yang diakibatkan
gangguan pada bidang kendali
𝑋𝑃 = Nilai perubahan gerak translasi sumbu 𝑥 yang diakibatkan
gangguan pada propulsion atau gaya dorong
𝑋𝑞 = Perubahan nilai gerak translasi pada sumbu 𝑥 yang diakibatkan oleh perubahan nilai kecepatan sudut angguk
xxvii
𝑋𝑟 = Perubahan nilai gerak translasi pada sumbu 𝑥 yang diakibatkan oleh perubahan nilai kecepatan sudut geleng
𝑋𝑢 = Perubahan nilai gerak translasi pada sumbu 𝑥 yang diakibatkan oleh perubahan nilai kecepatan gerak translasi pada sumbu 𝑥 𝑋𝑣 = Perubahan nilai gerak translasi pada sumbu 𝑥 yang diakibatkan
oleh perubahan nilai kecepatan gerak translasi pada sumbu 𝑦 𝑋𝑤 = Perubahan nilai gerak translasi pada sumbu 𝑥 yang diakibatkan
oleh perubahan nilai kecepatan gerak translasi pada sumbu 𝑧 𝑋𝑝̇ = Perubahan nilai gerak translasi pada sumbu 𝑥 yang diakibatkan
oleh perubahan nilai percepatan sudut guling
𝑋𝑞̇ = Perubahan nilai gerak translasi pada sumbu 𝑥 yang diakibatkan
oleh perubahan nilai percepatan sudut angguk
𝑋𝑟̇ = Perubahan nilai gerak translasi pada sumbu 𝑥 yang diakibatkan oleh perubahan nilai percepatan sudut geleng
𝑋𝑢̇ = Perubahan nilai gerak translasi pada sumbu 𝑥 yang diakibatkan oleh perubahan nilai percepatan gerak translasi pada sumbu 𝑥 𝑋𝑣̇ = Perubahan nilai gerak translasi pada sumbu 𝑥 yang diakibatkan
oleh perubahan nilai percepatan gerak translasi pada sumbu 𝑦 𝑋𝑤̇ = Perubahan nilai gerak translasi pada sumbu 𝑥 yang diakibatkan
oleh perubahan nilai percepatan gerak translasi pada sumbu 𝑧
𝑋𝛿𝑒
= Perubahan nilai gerak translasi pada sumbu 𝑥 yang diakibatkan oleh perubahan gerak defleksi permukaan bidang kendali elevator
𝑋𝛿𝑎 = Perubahan nilai gerak translasi pada sumbu 𝑥 yang diakibatkan oleh perubahan gerak defleksi permukaan bidang kendali aileron
𝑋𝛿𝑟 = Perubahan nilai gerak translasi pada sumbu 𝑥 yang diakibatkan oleh perubahan gerak defleksi permukaan bidang kendali rudder
xxviii
𝑦 = Output sistem
𝛾𝑥𝑝 = Ukuran perubahan parameter adaptif terhadap sistem plant
𝛾𝑟𝑓 = ukuran perubahan parameter adaptif terhadap sistem referensi
𝑌 = Gerak translasi pada sumbu 𝑦
𝑌0 = Gerak translasi pada sumbu 𝑦 ketika 𝑡 = 0
𝑌𝐴 = Nilai perubahan gerak translasi sumbu 𝑦 yang diakibatkan
perubahan parameter aerodinamik
𝑌∁ = Nilai perubahan gerak translasi sumbu 𝑦 yang diakibatkan gangguan pada bidang kendali
𝑌𝑃 = Nilai perubahan gerak translasi sumbu 𝑦 yang diakibatkan gangguan pada propulsion atau gaya dorong
𝑌𝑞 = Perubahan nilai gerak translasi pada sumbu 𝑦 yang diakibatkan
oleh perubahan nilai kecepatan sudut angguk
𝑌𝑟 = Perubahan nilai gerak translasi pada sumbu 𝑦 yang diakibatkan oleh perubahan nilai kecepatan sudut geleng
𝑌𝑢 = Perubahan nilai gerak translasi pada sumbu 𝑦 yang diakibatkan oleh perubahan nilai kecepatan gerak translasi pada sumbu 𝑥 𝑌𝑣 = Perubahan nilai gerak translasi pada sumbu 𝑦 yang diakibatkan
oleh perubahan nilai kecepatan gerak translasi pada sumbu 𝑦 𝑌𝑤 = Perubahan nilai gerak translasi pada sumbu 𝑦 yang diakibatkan
oleh perubahan nilai kecepatan gerak translasi pada sumbu 𝑧 𝑌𝑝̇ = Perubahan nilai gerak translasi pada sumbu 𝑦 yang diakibatkan
oleh perubahan nilai percepatan sudut guling
𝑌𝑞̇ = Perubahan nilai gerak translasi pada sumbu 𝑦 yang diakibatkan
oleh perubahan nilai percepatan sudut angguk
𝑌𝑟̇ = Perubahan nilai gerak translasi pada sumbu 𝑦 yang diakibatkan
oleh perubahan nilai percepatan sudut geleng
𝑌𝑢̇ = Perubahan nilai gerak translasi pada sumbu 𝑦 yang diakibatkan oleh perubahan nilai percepatan gerak translasi pada sumbu 𝑥
xxix
𝑌𝑣̇ = Perubahan nilai gerak translasi pada sumbu 𝑦 yang diakibatkan oleh perubahan nilai percepatan gerak translasi pada sumbu 𝑦 𝑌𝑤̇ = Perubahan nilai gerak translasi pada sumbu 𝑦 yang diakibatkan
oleh perubahan nilai percepatan gerak translasi pada sumbu 𝑧 𝑌𝛿𝑒 = Perubahan nilai gerak translasi pada sumbu 𝑦 yang diakibatkan
oleh perubahan gerak defleksi permukaan bidang kendali elevator
𝑌𝛿𝑎 = Perubahan nilai gerak translasi pada sumbu 𝑦 yang diakibatkan oleh perubahan gerak defleksi permukaan bidang kendali aileron
𝑌𝛿𝑟 = Perubahan nilai gerak translasi pada sumbu 𝑦 yang diakibatkan oleh perubahan gerak defleksi permukaan bidang kendali rudder
Z
𝑧𝑖 = Akar ciri dari numerator 𝑍−1 = Fungsi waktu tunda
𝑍 = Gerak translasi pada sumbu 𝑧
𝑍0 = Gerak translasi pada sumbu 𝑧 ketika 𝑡 = 0
𝑍𝐴 = Nilai perubahan gerak translasi sumbu 𝑧 yang diakibatkan perubahan parameter aerodinamik
𝑍∁ = Nilai perubahan gerak translasi sumbu 𝑧 yang diakibatkan
gangguan pada bidang kendali
𝑍𝑃 = Nilai perubahan gerak translasi sumbu 𝑧 yang diakibatkan gangguan pada propulsion atau gaya dorong
𝑍𝑞 = Perubahan nilai gerak translasi pada sumbu 𝑧 yang diakibatkan oleh perubahan nilai kecepatan sudut angguk
𝑍𝑟 = Perubahan nilai gerak translasi pada sumbu 𝑧 yang diakibatkan
oleh perubahan nilai kecepatan sudut geleng
𝑍𝑢 = Perubahan nilai gerak translasi pada sumbu 𝑧 yang diakibatkan oleh perubahan nilai kecepatan gerak translasi pada sumbu 𝑥
xxx
𝑍𝑣 = Perubahan nilai gerak translasi pada sumbu 𝑧 yang diakibatkan oleh perubahan nilai kecepatan gerak translasi pada sumbu 𝑦 𝑍𝑤 = Perubahan nilai gerak translasi pada sumbu 𝑧 yang diakibatkan
oleh perubahan nilai kecepatan gerak translasi pada sumbu 𝑧 𝑍𝑝̇ = Perubahan nilai gerak translasi pada sumbu 𝑧 yang diakibatkan
oleh perubahan nilai percepatan sudut guling
𝑍𝑞̇ = Perubahan nilai gerak translasi pada sumbu 𝑧 yang diakibatkan
oleh perubahan nilai percepatan sudut angguk,
𝑍𝑟̇ = Perubahan nilai gerak translasi pada sumbu 𝑧 yang diakibatkan oleh perubahan nilai percepatan sudut geleng
𝑍𝑢̇ = Perubahan nilai gerak translasi pada sumbu 𝑧 yang diakibatkan oleh perubahan nilai percepatan gerak translasi pada sumbu 𝑥 𝑍𝑣̇ = Perubahan nilai gerak translasi pada sumbu 𝑧 yang diakibatkan
oleh perubahan nilai percepatan gerak translasi pada sumbu 𝑦 𝑍𝑤̇ = Perubahan nilai gerak translasi pada sumbu 𝑧 yang diakibatkan
oleh perubahan nilai percepatan gerak translasi pada sumbu 𝑧 𝑍𝛿𝑒 = Perubahan nilai gerak translasi pada sumbu 𝑧 yang diakibatkan
oleh perubahan gerak defleksi permukaan bidang kendali elevator
𝑍𝛿𝑎 = Perubahan nilai gerak translasi pada sumbu 𝑧 yang diakibatkan oleh perubahan gerak defleksi permukaan bidang kendali aileron
𝑍𝛿𝑟 = Perubahan nilai gerak translasi pada sumbu 𝑧 yang diakibatkan oleh perubahan gerak defleksi permukaan bidang kendali rudder
1 BAB I PENDAHULUAN 1.1 Latar Belakang
Rudal kendali adalah salah satu jenis teknologi masa kini yang terus dikembangkan oleh setiap negara, salah satunya Indonesia. Rudal kendali bisa dikatakan sebagai pencapaian teknologi tertinggi karena memiliki fungsi yang dapat memperoleh informasi terkait hal-hal yang ada di penjuru langit. Selain itu, rudal kendali juga merupakan salah satu teknologi yang dapat mengantarkan manusia menembus langit. Dengan teknologi rudal kendali yang terus dikembangkan, manusia semakin banyak mendapatkan informasi apa yang ada di penjuru langit. Sebenarnya, hal ini sudah ditakdirkan bagi manusia untuk melintasi penjuru langit. Karena telah ditegaskan dalam Al-Qur’an surat Ar-Rahman ayat 33-34, yaitu :
اأ ْنِم اوُذُفْ نا ت ْناأ ْمُتْعاطاتْسا ِنِإ ِسْنِْلْااو ِ نِْلْا اراشْعام ايَ
ِتااواامَّسلا ِرااطْق
ضْراْلْااو
﴿
٣٣﴾
َر ِء َلَآ ِِّيَأِبَف
ِنَبَِِّذَكُت اَمُكِِّب
﴿
٣٤﴾
نااطْلُسِب َّلَِإ انوُذُفْ نا ت الَ ۚ اوُذُفْ نااف
“Wahai golongan jin dan manusia ! jika kamu sanggup menembus (melintasi) penjuru langit dan bumi, maka tembuslah. Kamu tidak akan mampu menembusnya kecuali dengan kekuatan (dari Allah). Maka nikmat Tuhanmu yang manakah yang kamu dustakan?”Berdasarkan ayat tersebut, secara tidak langsung merupakan sebuah pernyataan tantangan untuk jin dan manusia agar dapat menjelajah luar angkasa sehingga sudah seharusnya bagi kita untuk mempelajari ilmu terkait teknologi rudal kendali. Hal inilah yang menjadi latar belakang munculnya para peniliti melakukan riset terkait rudal kendali.
Di Indonesia, belum banyak peneliti yang membahas terkait bidang peluru kendali atau rudal kendali, bahkan sampai rancang bangunnya sehingga akurasi model yang ada masih diragukan. Untuk memperoleh keakuratan model,
2
diperlukan sistem kendali, yang mana sistem kendali ini berguna untuk pengendalian terbang dari peluru kendali atau rudal tersebut, agar ketika terbang dapat mempertahankan kestabilannya.
Permasalahan yang biasanya terjadi pada model rudal ini, salah satunya adalah miss-match parameter pada model tersebut, atau bisa dikatakan ketidakakuratan model. Untuk mengatasi ketidakuratan model diperlukan suatu sistem kendali yang dinamakan inkremental. Sistem kendali inkremental adalah suatu sistem pengendalian yang dapat mengurangi ketergantungan pada model dan memungkinkan memodelkan ketidakcocokan dinamika sistem [1] sehingga perubahan apapun yang terjadi pada model tetap bisa dikendalikan, Error-nya terus di perkecil tanpa harus melihat atau menyesuaikan kembali kepada model [1] . Lalu, permasalahan lain yang terjadi pada model rudal kendali adalah kemungkinan adanya gangguan di luar perencanaan, misalnya seperti perubahan arah mata angin, tekanan udara, ataupun cuaca. Hal-hal tersebut merupakan gangguan yang tidak bisa diperkirakan sebelumnya. Maka dari itu diperlukan suatu sistem yang dinamakan sistem kendali adaptif. Sistem kendali adaptif adalah suatu sistem yang dapat beradaptasi terhadap perubahan lingkungan eksternal maupun internalnya untuk dapat mempertahankan kinerja dan stabilitas sistem [2].
Terdapat beberapa penelitian yang membahas sistem kendali adaptif, di antaranya perancangan kendali penerbangan dst. Salah satunya adalah perancangan kendali penerbangan berdasarkan inversi dinamis nonlinier yang dilakukan S. Sieberling dkk [3] pada tahun 2010. Penelitian tersebut membahas mengenai pendekatan yang disebutinversi dinamis nonlinier inkremental, yang mana pendekatan kendali ini menggunakan sifat sistem mekanis secara umum dan inversi dinamis nonlinier dengan mengumpankan kembali percepatan sudut. Secara teoritis, umpan balik percepatan sudut dapat menghilangkan sensitivitas terhadap perubahan parameter model, serta sangat meningkatkan kinerja sistem yang kuat, dibandingkan dengan inversi dinamis nonlinier konvensional. Kemudian pada tahun 2016 [4] Ewoud J.J dkk melakukan
3
penelitian yang membahas terkait pendekatan yang disebut adaptif inversi dinamik nonlinear inkremental, yang mana pendekatan kendali ini berbasis sensor yang menjanjikan untuk memberikan kendali nonlinear berkinerja tinggi tanpa memerlukan model terperinci dari kendaraan yang dikendalikan.
Berdasarkan penelitian-penelitian tersebut, terlihat bahwa sistem kendali inkremental mampu menyelesaikan permasalahan model miss-match, beradaptasi dengan segala gangguan, serta dapat meningkatkan kinerja sistem yang lebih kuat.
Pada penelitian ini dibahas perancangan kendali inkremental adaptif untuk matra lateral direksional pada model Rudal RKX 200-TJ LAPAN dan lebih fokus pada 2 sudut yang ada pada rudal kendali, yaitu sudut guling (roll angle) dan sudut geleng (yow angle). Karena penelitian ini memfokuskan pada sudut guling dan geleng yang mana pada kedua sudut ini mempengaruhi gerak lateral direksional sehingga peneliti membatasi sikap terbang yang ingin diteliti adalah sikap terbang berguling dan berbelok. Kemudian perancangan kendali inkremental adaptif dilakukan pengujian kestabilan dengan menggunakan Metode Lyapunov. Lalu, hasil perancangan kendali disimulasikan pada RKX 200-TJ LAPAN.
1.2 Rumusan Masalah
Berdasarkan latar belakang yang telah diuraikan di atas, permasalahan yang dibahas pada penelitian ini adalah sebagai berikut:
1. Bagaimanakah kendali inkremental adaptif untuk matra lateral direksional pada RKX 200-TJ LAPAN?
2. Bagaimanakah hasil simulasi perancangan kendali inkremental adaptif untuk matra lateral direksional pada RKX 200-TJ LAPAN?
3. Bagaimana perbedaan spesifik antara hasil simulasi perancangan kendali baseline dengan kendali inkremental adaptif?
1.3 Tujuan Penelitian
4
sebagai berikut:
1. Mengimplementasikan kendali inkremental adaptif untuk matra lateral direksional pada RKX 200-TJ LAPAN.
2. Mengetahui hasil simulasi perancangan kendali inkremental adaptif untuk matra lateral direksional pada RKX 200-TJ LAPAN.
3. Mengetahui adanya perbedaan spesifik antara hasil simulasi perancangan kendali baseline dengan kendali inkremental adaptif.
1.4 Batasan Masalah
Untuk lebih memfokuskan pada penelitian dan menyederhanakan permasalahan, maka batasan-batasan yang digunakan pada penelitian ini adalah sebagai berikut:
1. Permasalahan pada penelitian ini difokuskan pada sikap terbang, yaitu sudut guling (roll angle) dan sudut geleng (yow angle).
2. Penelitian dilakukan untuk kondisi rudal kendali pada saat kondisi terbang jelajah (cruise flight) dengan kecepatan 68 m/s atau sekitar 245 km/h dan ketinggian 200 m.
3. Penelitian hanya sampai simulasi sistem.
1.5 Manfaat Penelitian
Manfaat yang diperoleh dari penelitian ini adalah sebagai berikut: 1. Mendapatkan wawasan terkait ilmu kendali.
2. Memperoleh desain kendali inkremental adaptif yang dapat disimulasikan pada RKX 200-TJ LAPAN sehingga dapat dijadikan referensi apabila penelitian ini ingin dikembangkan kembali.
5 BAB II
LANDASAN TEORI
2.1 Pemodelan Matematis
Sebelum membahas terkait persamaan gerak pada rudal perlu diketahui beberapa pendefinisan yang diperlukan untuk mempelajari dinamika rudal dan identifikasi sistem selanjutnya pada penelitian ini, di antaranya adalah kerangka referensi, sudut serang angin, sudut permukaan rudal, dan sikap terbang lateral direksional. Pada kerangka referensi sendiri terbagi menjadi 2 bagian yaitu, sumbu bumi (Earth axes) dan sumbu badan (Body axes). Berikut penjelasan lebih lanjut.
A. Sumbu Bumi (Earth axes)
Pada dasarnya sumbu ini beracuan pada permukaan bumi sehingga sumbu positif x ditujukkan untuk arah geografis utara, sumbu positif y ditujukkan untuk arah geografis timur, dan sumbu positif z ditujukkan untuk titik pusat pada bumi [5].
B. Sumbu Badan (Body axes)
Pada dasarnya sumbu ini beracuan pada titik tumpu tengah badan rudal atau bisa disebut center of gravity (c.g) sehingga sumbu positif x ditujukkan sebagai
𝑋+ (𝑈𝑡𝑎𝑟𝑎)
𝑌+(𝑇𝑖𝑚𝑢𝑟)
𝑍+(𝑏𝑎𝑤𝑎ℎ)
6
kepala atau moncong rudal, sumbu positif y ditujukkan sebagai sayap kanan rudal, dan sumbu positif z ditujukkan sebagai badan rudal melalui arah bawah [5].
C. Sudut Serang Angin
Sudut serang angin adalah sudut yang terbentuk akibat kecepatan rudal relatif terhadap udara di sekitarnya. Dalam hal ini, sudut tersebut terbagi menjadi 2 bagian yaitu, angle of attack (AOA) yang kemudian didefinisikan sebagai 𝜶 dan side slip yang kemudian didefinisikan sebagai 𝜷.
Definisi dari AOA adalah sudut antara garis referensi di rudal atau sayap dengan angin relatif atau udara yang datang [6]. AOA termasuk ke dalam parameter aerodinamis yang penting untuk memahami stabilitas, kinerja dan kendali rudal karena dapat menambah atau mengurangi daya angkat yang dihasilkan oleh sayap saat menjulurkan hidung rudal atau moncong ke atas atau ke bawah dengan menambah atau mengurangi AOA [7]. Sedangkan definisi dari side slip adalah antara vektor kecepatan pada sumbu badan x dengan sumbu badan z, atau lebih jelasnya bisa dilihat pada gambar (2.3) sebagai berikut.
Body Y-Axis Body Z-Axis Body X-Axis
7 D. Sudut Kendali Permukaan Rudal
Kendali permukaan adalah permukaan berengsel yang dapat diputar garis engselnya untuk mengubah kekuatan aerodinamis dan momen pada rudal terbang [5]. Rudal terbang pada umumnya memiliki 3 kendali permukaan yaitu, kendali elevator yang didefinisikan sebagai 𝜹𝒆, kendali aileron yang
didefinisikan sebagai 𝜹𝒂, dan kendali rudder yang didefinisikan sebagai 𝜹𝒓. Kendali permukaan ini digunakan untuk menentukan kecepatan sudut pada sumbu badan rudal, yang kemudian lebih di kenal dengan kata sifat roll (sudut guling), pitch (sudut angguk), dan yaw (sudut geleng).
Untuk kata sifat roll atau sudut guling digunakan untuk kinerja dari kendali aileron, yang mana pada kendali aileron ditunjukkan untuk sayap kanan dan kiri dari rudal. Kendali aileron dibelokkan secara simultan dengan cara asimetris, artinya bahwa kendali aileron pada setiap individu permukaan setiap sayap bergerak ke arah yang berlawanan . [5]
Untuk kata sifat pitch atau sudut angguk digunakan untuk kinerja dari kendali elevator, yang mana pada kendali elevator ditunjukkan untuk sayap belakang rudal. Kendali elevator menghasilkan sudut positif jika sayap rudal bergerak ke arah bawah, dan sebaliknya.
Untuk kata sifat yaw atau sudut geleng digunakan untuk kinerja dari kendali rudder, yang mana pada kendali rudder ditunjukkan untuk sayap rudal bagian
X-Axis (Body) X-Axis (Stability) X-Axis (Wind) 𝛼 𝛽
8
atas. Kendali rudder menghasilkan sudut positif jika sayap rudal bergerak ke arah kanan, dan sebaliknya. Lebih jelasnya terkait kendali aileron, rudder, elevator dapat dilihat pada gambar (2.4).
E. Sikap Terbang Lateral Direksional
Sikap terbang lateral direksional adalah salah satu sikap terbang yang dimiliki rudal. Sikap terbang ini melibatkan kendali permukaan aileron yang menghasilkan sudut guling dan kendali permukaan elevator yang menghasilkan sudut geleng. Sikap terbang lateral direksional biasanya terdiri dari pergerakan dengan osilasi teredam dan dua pergerakan eksponensial. Berikut penjelasan lebih lanjut :
- Pergerakkan roll-subsidence : pergerakkan ini biasanya sangat cepat dan sangat teredam. Pergerakan ini terdiri dari gerakan rolling murni dan tidak berosilasi seperti yang ditujukkan pada gambar (2.5).
Gambar 2. 4 Kendali Permukaan Rudal
Kendali aileron ( 𝛿𝛼) Kendali aileron ( 𝛿𝛼) Kendali rudder ( 𝛿𝑟) Kendali rudder ( 𝛿𝑟) Kendali elevator ( 𝛿𝑒) Kendali elevator ( 𝛿𝑒)
9
Gambar 2. 5 Ilustrasi Mode Roll
- Sikap terbang spiral : sikap terbang ini sangat lambat dan sering tidak stabil. Sikap ini biasanya muncul terutama dalam sudut geleng (𝜓). Untuk waktu yang sementara, sikap terbang ini biasanya tidak kritis, dalam arti banyak rudal memiliki sikap terbang spiral yang tidak stabil yang memerlukan intervensi pilot untuk mempertahankan posisinya. Sikap terbang spiral ditunjukkan pada gambar (2.6).
Gambar 2. 6 Ilustrasi Mode Spiral
- Sikap terbang dutch roll : sikap terbang ini biasanya underdamped dan terbang cukup cepat. Sikap terbang ini melibatkan kopling gerakan roll dan yaw. Sikap ini biasanya berosilasi dan sering sedikit teredam. Gambar (2.7) mewakili sikap terbang dutch roll.
10
Gambar 2. 7 Ilustrasi Mode Dutch Roll
2.1.1 Persamaan Gerak 6 Derajat Kebebasan 2.1.1.1 Persamaan Gaya
Persamaan umum gerak pada rudal dapat dideskripsikan dengan hukum newton ke 2 dari persamaan gerak translasi sebagai berikut :
𝐹 = 𝑑
𝑑𝑡(𝑚𝑉) (2.1)
Persamaan pada (2.1) adalah persamaan vektor yang mendeskripsikan gerak translasi pada c.g. Setiap persamaan vektor mewakili 3 persamaan skalar sebagai komponen vektor. Berikut nilai-nilai komponen yang ada pada persamaan (2.1) : 𝐹 = [ 𝐹𝑥 𝐹𝑦 𝐹𝑧 ] 𝑉 = [ 𝑢 𝑣 𝑤 ] (2.2)
Rumus turunan [5] yang diterapkan pada vektor dalam mengekspresikan sikap terbang yaitu :
𝑑 𝑑𝑡(. ) =
𝛿
𝛿𝑡(. ) + 𝜔 × (. ) (2.3)
Kemudian disubstitusi persamaan (2.1) ke dalam (2.3) sehingga diperoleh persamaan sebagai berikut :
𝐹 = 𝑚 𝑉̇ + 𝜔 × 𝑚𝑉 (2.4)
dengan mensubstitusi persamaan (2.2) pada persamaan (2.4) maka persamaan untuk gerak tranlasi menjadi :
[ 𝐹𝑥 𝐹𝑦 𝐹𝑧 ] = 𝑚 ([ 𝑢̇ 𝑣̇ 𝑤̇ ] + ([ 𝑝 𝑞 𝑟 ] × [ 𝑢 𝑣 𝑤 ])) (2.5)
11 [ 𝐹𝑥 𝐹𝑦 𝐹𝑧 ] = 𝑚 ([ 𝑢̇ 𝑣̇ 𝑤̇ ] + [ 𝑞𝑤 − 𝑟𝑣 −𝑝𝑤 + 𝑟𝑢 𝑝𝑣 − 𝑞𝑢 ]) (2.6)
sehingga didapatkan persamaan untuk vektor gaya translasi yang dikategorikan ke dalam 3 persaman gaya yang terpisah. Tiga persamaan ini ditulis sebagai berikut:
𝐹𝑥= 𝑚(𝑢̇ + 𝑞𝑤 − 𝑟𝑣) (2.7a)
𝐹𝑦 = 𝑚(𝑣̇ − 𝑝𝑤 + 𝑟𝑢) (2.7b)
𝐹𝑧 = 𝑚(𝑤̇ + 𝑝𝑣 − 𝑞𝑢) (2.7c)
Gaya-gaya ini menyatakan besarnya total gaya yang bekerja pada setiap arah sumbu dan kemudian dapat dikategorikan ke dalam jenis kekuatan yang berbeda-beda, yang bekerja pada sebuah rudal saat terbang. Gaya yang diterapkan pada rudal saat terbang pada umumnya adalah gaya aerodinamis, gaya gravitasi atau berat dan gaya dorong atau dorongan sehingga dapat diekspresikan menjadi:
𝐹 = 𝐹𝐴+ 𝐹𝐺+ 𝐹𝑃 (2.8)
Definisi dari setiap gaya dijelaskan pada bagian ini.
Gaya Aerodinamik (Aerodynamic Forces)
Kekuatan ini terjadi karena pergerakan relatif antara badan rudal atau badan rudal dengan udara [8] . Karakteristik badan rudal dan juga kondisi udara mempengaruhi besarnya gaya ini. Vektor persamaan gaya aerodinamik dapat ditulis sebagai berikut :
𝐹𝐴 = 𝑞̅𝑆 [
𝐶𝑥 𝐶𝑦
𝐶𝑧
] (2.9)
dengan tekanan aerodinamik atau kecepatan udara dapat dinyatakan sebagai berikut :
𝑞̅ =1 2𝜌𝑉𝑎
2 (2.10)
12
Gaya ini didefinisikan sebagai gaya ke bawah yang dihasilkan oleh gaya tarik gravitasi sebuah planet, dalam hal ini adalah gravitasi bumi. Besarnya gaya gravitasi di bagi menjadi tiga arah sesuai dengan kerangka sumbu badan. Komposisi daripada vektor gaya gravitasi terhadap sumbu badan dapat ditentukan melalui perkalian product tiga matriks rotasi sebagai berikut :
𝐹𝐺 = 𝑚 [ 𝑔𝑥 𝑔𝑦 𝑔𝑧 ] = 𝑚 [ 1 0 0 0 𝑐𝑜𝑠𝜙 𝑠𝑖𝑛𝜙 0 −𝑠𝑖𝑛𝜙 𝑐𝑜𝑠𝜙 ] [ 𝑐𝑜𝑠𝜃 0 −𝑠𝑖𝑛𝜃 0 1 0 𝑠𝑖𝑛𝜃 0 𝑐𝑜𝑠𝜃 ] [ 𝑐𝑜𝑠𝜓 𝑠𝑖𝑛𝜓 0 −𝑠𝑖𝑛𝜓 𝑐𝑜𝑠𝜓 0 0 0 1 ] [ 0 0 𝑔 ] = 𝑚 [ −𝑔𝑠𝑖𝑛𝜃 𝑔𝑠𝑖𝑛𝜙𝑐𝑜𝑠𝜃 𝑔𝑐𝑜𝑠𝜙𝑐𝑜𝑠𝜃 ] (2.11) dengan massa (m) rudal konstan.
Gaya Dorong (Propulsion Forces)
Gaya ini didefinisikan sebagai gaya yang bertanggung jawab untuk pergerakan lanjutan rudal saat terbang dengan mempercepat sejumlah udara tertentu melalui beberapa proses seperti kompresi, pembakaran, dan ekspansi yang terjadi dalam nosel pendorong atau melalui rotasi baling-baling. Dalam beberapa kasus, gaya ini juga dapat di balik untuk membuat rudal bisa mundur. gaya ini hanya muncul sebagai gaya yang diterapkan di sepanjang sumbu x pada kerangka sumbu badan dan melalui c.g,. vektor persamaan gaya ini dapat ditulis sebagai berikut : 𝐹𝑃 = [ 𝑇 0 0 ] (2.12)
Dari ketiga gaya berbeda yang bekerja pada rudal saat terbang, maka gaya total dapat diperoleh dengan menjumlahkan setiap gaya sehingga dapat kita substitusikan persamaan (2.9),(2.11), dan (2.12) pada persamaan (2.8).
13 𝐹 = 𝐹𝐴+ 𝐹𝐺+ 𝐹𝑇 𝐹 = 𝑞̅𝑆 [ 𝐶𝑥 𝐶𝑦 𝐶𝑧 ] + [ −𝑚𝑔𝑠𝑖𝑛𝜃 𝑚𝑔𝑠𝑖𝑛𝜙𝑐𝑜𝑠𝜃 𝑚𝑔𝑐𝑜𝑠𝜙𝑐𝑜𝑠𝜃 ] + [ 𝑇 0 0 ] 𝐹 = [ 𝑞̅𝑆𝐶𝑥− 𝑚𝑔𝑠𝑖𝑛𝜃 + 𝑇 𝑞̅𝑆𝐶𝑦+ 𝑚𝑔𝑠𝑖𝑛𝜙𝑐𝑜𝑠𝜃 𝑞̅𝑆𝐶𝑧+ 𝑚𝑔𝑐𝑜𝑠𝜙𝑐𝑜𝑠𝜃 ]
Sehingga dapat dituliskan untuk setiap persamaan gaya secara terpisah : 𝐹𝑥 = 𝑞̅𝑆𝐶𝑥− 𝑚𝑔 𝑠𝑖𝑛𝜃 + 𝑇 (2.13a) 𝐹𝑦 = 𝑞̅𝑆𝐶𝑦+ 𝑚𝑔 𝑠𝑖𝑛𝜙 𝑐𝑜𝑠𝜃 (2.13b) 𝐹𝑧= 𝑞̅𝑆𝐶𝑧+ 𝑚𝑔 𝑐𝑜𝑠𝜙 𝑐𝑜𝑠𝜃 (2.13c) gaya tambahan ini setara dengan gaya total 𝐹 yang telah diperoleh sebelumnya melalui penggunaan hukum kedua newton sehingga persamaan (2.6) dapat diekspresikan sebagai berikut :
𝑚𝑢̇ = 𝑚(𝑟𝑣 − 𝑞𝑤) + 𝑞̅𝑆𝐶𝑥− 𝑚𝑔 𝑠𝑖𝑛𝜃 + 𝑇 (2.14a) 𝑚𝑣̇ = 𝑚(𝑝𝑤 − 𝑟𝑢) + 𝑞̅𝑆𝐶𝑦+ 𝑚𝑔 𝑠𝑖𝑛𝜙 𝑐𝑜𝑠𝜃 (2.14b) 𝑚𝑤̇ = 𝑚(𝑞𝑢 − 𝑝𝑣) + 𝑞̅𝑆𝐶𝑧+ 𝑚𝑔 𝑐𝑜𝑠𝜙 𝑐𝑜𝑠𝜃 (2.14c)
2.1.1.2 Persamaan Momen
Selain pada gerak translasi, persamaan umum gerak pada rudal yang dideskripsikan dengan hukum newton ke 2, juga dapat menentukan total momen yang bekerja pada rudal. Momen yang bekerja pada rudal pada umumnya relatif berkaitan dengan gerak rotasi yang dapat dinyatakan sebagai berikut :
𝑀 = 𝑑
𝑑𝑡(𝐼𝜔) (2.15)
Persamaan pada (2.15) adalah persamaan vektor yang mendeskripsikan gerak rotasi pada c.g. Setiap persamaan vektor mewakili 3 persamaan skalar sebagai komponen vektor. Berikut nilai-nilai komponen yang ada pada persamaan (2.15):
14 𝑀 = [ 𝑀𝑥 𝑀𝑦 𝑀𝑧 ] 𝐼 = [ 𝐼𝑥 −𝐼𝑥𝑦 −𝐼𝑥𝑧 −𝐼𝑦𝑥 𝐼𝑦 −𝐼𝑦𝑧 −𝐼𝑧𝑥 −𝐼𝑧𝑦 𝐼𝑧 ] 𝜔 = [ 𝑝 𝑞 𝑟 ] (2.16) Referensi [5] mengatakan untuk matriks inersia relatif simetri terhadap bidang y, maka nilai pada elemen 𝐼𝑥𝑦= 𝐼𝑦𝑥 = 𝐼𝑦𝑧 = 𝐼𝑧𝑦 = 0 sehingga matriks inersia menjadi : 𝐼 = [ 𝐼𝑥 0 −𝐼𝑥𝑧 0 𝐼𝑦 0 −𝐼𝑧𝑥 0 𝐼𝑧 ] (2.17)
rumus turunan [5] yang diterapkan pada vektor dalam mengekspresikan sikap terbang yaitu :
𝑑 𝑑𝑡(. ) =
𝛿
𝛿𝑡(. ) + 𝜔 × (. ) (2.18) dengan mensubstitusikan persamaan (2.17) ke (2.18) sehingga didapatkan hasil :
𝑀 = 𝐼𝜔̇ + 𝜔 × 𝐼𝜔 (2.19)
dengan mensubstitusi persamaan (2.16),(2.17) pada persamaan (2.19) maka persamaan untuk gerak rotasi berubah menjadi :
[ 𝑀𝑥 𝑀𝑦 𝑀𝑧 ] = ([ 𝐼𝑥 0 −𝐼𝑥𝑧 0 𝐼𝑦 0 −𝐼𝑧𝑥 0 𝐼𝑧 ] [ 𝑝̇ 𝑞̇ 𝑟̇ ]) + ([ 𝑝 𝑞 𝑟 ] × [ 𝑝𝐼𝑥− 𝑟𝐼𝑥𝑧 𝑞𝐼𝑦 −𝑝𝐼𝑥𝑧+ 𝑟𝐼𝑧 ]) [ 𝑀𝑥 𝑀𝑦 𝑀𝑧 ] = ([ 𝑝̇𝐼𝑥− 𝑟̇𝐼𝑥𝑧 𝑞̇𝐼𝑦 −𝑝̇𝐼𝑥𝑧+ 𝑟̇𝐼𝑧 ] + [ 𝑞𝑟(𝐼𝑧− 𝐼𝑦) + 𝑝𝑞𝐼𝑥𝑧 𝑝𝑟(𝐼𝑥− 𝐼𝑧) + (𝑝2− 𝑟2)𝐼 𝑥𝑧 𝑝𝑞(𝐼𝑦− 𝐼𝑥) + 𝑞𝑟𝐼𝑥𝑧 ])
sehingga didapatkan persamaan untuk vektor rotasi yang dapat dikategorikan ke dalam 3 persaman gaya yang terpisah. Tiga persamaan ini ditulis sebagai :
𝑀𝑥= 𝑝̇𝐼𝑥− 𝑟̇𝐼𝑥𝑧+ 𝑞𝑟(𝐼𝑧− 𝐼𝑦) + 𝑝𝑞𝐼𝑥𝑧 (2.20a)
𝑀𝑦 = 𝑞̇𝐼𝑦+ 𝑝𝑟(𝐼𝑥− 𝐼𝑧) + (𝑝2− 𝑟2)𝐼𝑥𝑧 (2.20b)
𝑀𝑧 = 𝑟̇𝐼𝑧− 𝑝̇𝐼𝑥𝑧 + 𝑝𝑞(𝐼𝑦− 𝐼𝑥) + 𝑞𝑟𝐼𝑥𝑧 (2.20c) Mirip dengan persamaan gaya, total momen di atas sama dengan penambahan berbagai jenis momen yang bekerja di rudal. Momen-momen ini
15
adalah momen aerodinamik dan momen pendorong seperti yang dideskripsikan sebagai berikut :
𝑀 = 𝑀𝐴+ 𝑀𝑃 (2.21)
tidak ada momen yang dihasilkan oleh gaya gravitasi, karena gaya bekerja tepat pada asal kerangka acuan tetap tubuh. Kemudian definisi dari setiap momen dijelaskan sebagai berikut :
Momen Aerodinamik (Aerodynamic Moments)
Jenis momen pada rudal terbang adalah momen yang dihasilkan oleh gaya aerodinamik pada airfoil. Sesuai dengan persamaan gaya, momen dapat di bagi menjadi tiga momen yang bekerja pada setiap sumbu kerangka tetap badan. Momen-momen ini dapat ditulis dalam korelasi dengan variabel-variabel yang mempengaruhi gaya sebagai berikut :
𝑀𝐴 = 𝑞̅𝑆 [ 𝑏𝐶𝑥 𝑐̅𝐶𝑦 𝑏𝐶𝑧
] (2.22)
Momen Dorong (Propulsion Moments)
Momen penggerak adalah momen yang disebabkan oleh gaya penggerak. Karena diasumsikan bahwa satu-satunya pendorong pada sebuah rudal terbang bekerja tepat pada sumbu 𝑥 dari kerangka tetap tubuh, maka dapat disimpulkan bahwa tidak ada momen yang bekerja pada rudal yang di pengaruhi oleh gaya pendorong sehingga persamaan vektor momen dapat ditulis sebagai berikut :
𝑀𝑃 = [
0 0 0
] (2.23)
Setelah setiap jenis momen telah didefiniskan, maka momen total dapat diperoleh dengan menambahkan momen-momen setiap jenisnya sehingga dapat kita substitusikan persamaan (2.22), dan (2.23), pada persamaan (2.21).
𝑀 = 𝑀𝐴+ 𝑀𝑃 𝑀 = 𝑞̅𝑆 [ 𝑏𝐶𝑥 𝑐̅𝐶𝑦 𝑏𝐶𝑧 ] + [ 0 0 0 ]
16 𝑀 = [ 𝑞̅𝑆𝑏𝐶𝑥 𝑞̅𝑆𝑐̅𝐶𝑦 𝑞̅𝑆𝑏𝐶𝑧 ] (2.25)
kemudian dapat dituliskan untuk setiap persamaan momen secara terpisah :
𝑀𝑥 = 𝑞̅𝑆𝑏𝐶𝑥 (2.26a)
𝑀𝑦 = 𝑞̅𝑆𝑐̅𝐶𝑦 (2.26b)
𝑀𝑧 = 𝑞̅𝑆𝑏𝐶𝑧 (2.26c)
Momen-momen tambahan ini setara dengan momen total yang telah diperoleh sebelumnya melalui penggunaan hukum gerak newton kedua sehingga persamaan (2.26) dapat diekspresikan sebagai berikut :
𝑝̇𝐼𝑥− 𝑟̇𝐼𝑥𝑧 = 𝑞̅𝑆𝑏𝐶𝑥− 𝑞𝑟(𝐼𝑧− 𝐼𝑦) + 𝑝𝑞𝐼𝑥𝑧 (2.27a) 𝑞̇𝐼𝑦 = 𝑞̅𝑆𝑐̅𝐶𝑦− 𝑝𝑟(𝐼𝑥− 𝐼𝑧) − (𝑝2− 𝑟2)𝐼
𝑥𝑧 (2.27b)
𝑟̇𝐼𝑧− 𝑝̇𝐼𝑥𝑧 = 𝑞̅𝑆𝑏𝐶𝑧− 𝑝𝑞(𝐼𝑦− 𝐼𝑥) − 𝑞𝑟𝐼𝑥𝑧 (2.27c)
2.1.1.3 Persamaan Kinematik Rotasi
Persamaan ini didefiniskan sebagai penghubung laju perubahan sudut euler ke komponen sumbu tubuh dari kecepatan sudut. Hubungan ini dapat ditemukan dengan menerapkan teknik untuk mengekspresikan komponen vektor dalam sistem poros yang di putar seperti berikut :
[ 𝑝 𝑞 𝑟 ] = [ 𝜙̇ 0 0 ] + [ 1 0 0 0 𝑐𝑜𝑠𝜙 𝑠𝑖𝑛𝜙 0 −𝑠𝑖𝑛𝜙 𝑐𝑜𝑠𝜙 ] [ 0 𝜃̇ 0 ] + [ 1 0 0 0 𝑐𝑜𝑠𝜙 𝑠𝑖𝑛𝜙 0 −𝑠𝑖𝑛𝜙 𝑐𝑜𝑠𝜙 ] [ 𝑐𝑜𝑠𝜃 0 −𝑠𝑖𝑛𝜃 0 1 0 𝑠𝑖𝑛𝜃 0 𝑐𝑜𝑠𝜃 ] [ 0 0 𝜓̇ ] [ 𝑝 𝑞 𝑟 ] = [ 1 0 −𝑠𝑖𝑛𝜃 0 𝑐𝑜𝑠𝜙 𝑠𝑖𝑛𝜙𝑐𝑜𝑠𝜃 0 −𝑠𝑖𝑛𝜙 𝑐𝑜𝑠𝜙𝑐𝑜𝑠𝜃 ] [ 𝜙̇ 𝜃̇ 𝜓̇ ] misalkan ℱ = [ 𝑝 𝑞 𝑟 ], Å = [ 1 0 −𝑠𝑖𝑛𝜃 0 𝑐𝑜𝑠𝜙 𝑠𝑖𝑛𝜙𝑐𝑜𝑠𝜃 0 −𝑠𝑖𝑛𝜙 𝑐𝑜𝑠𝜙𝑐𝑜𝑠𝜃 ], ℬ = [ 𝜙̇ 𝜃̇ 𝜓̇ ], sehingga dapat dinotasikan sebagai berikut :
17 ℱ = Å. ℬ ℬ = Å−1ℱ (2.28) dengan, Å−1 = 1 det Å. 𝑎𝑑𝑗Å = 1 𝑐𝑜𝑠𝜃. [ 𝑐𝑜𝑠𝜃 𝑠𝑖𝑛𝜙𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜙𝑠𝑖𝑛𝜃 0 𝑐𝑜𝑠𝜙𝑐𝑜𝑠𝜃 −𝑠𝑖𝑛𝜙𝑐𝑜𝑠𝜃 0 𝑠𝑖𝑛𝜙 𝑐𝑜𝑠𝜙 ] = [ 1 𝑠𝑖𝑛𝜙𝑡𝑎𝑛𝜃 𝑐𝑜𝑠𝜙𝑡𝑎𝑛𝜃 0 𝑐𝑜𝑠𝜙 −𝑠𝑖𝑛𝜙 0 𝑠𝑖𝑛𝜙 𝑐𝑜𝑠𝜃 𝑐𝑜𝑠𝜙 𝑐𝑜𝑠𝜃 ] (2.29)
Kemudian substitusi (2.29) ke (2.28) sebagai berikut :
ℬ = Å−1ℱ [ 𝜙̇ 𝜃̇ 𝜓̇] = [ 1 𝑠𝑖𝑛𝜙𝑡𝑎𝑛𝜃 𝑐𝑜𝑠𝜙𝑡𝑎𝑛𝜃 0 𝑐𝑜𝑠𝜙 −𝑠𝑖𝑛𝜙 0 𝑠𝑖𝑛𝜙 𝑐𝑜𝑠𝜃 𝑐𝑜𝑠𝜙 𝑐𝑜𝑠𝜃 ] . [ 𝑝 𝑞 𝑟 ]
Sehingga didapatkan tiga persamaan yang terpisah sebagai berikut : 𝜙̇ = 𝑝 + 𝑡𝑎𝑛𝜃(𝑞𝑠𝑖𝑛𝜙 + 𝑟𝑐𝑜𝑠𝜙) (2.30a)
𝜃̇ = 𝑞𝑐𝑜𝑠𝜙 − 𝑟𝑠𝑖𝑛𝜙 (2.30b)
𝜓̇ =𝑞𝑠𝑖𝑛𝜙 + 𝑟𝑐𝑜𝑠𝜙
𝑐𝑜𝑠𝜃 (2.30c)
2.2 Perancangan Sistem Kendali 2.2.1 Poles dan Zeros
Definisi dari sistem poles and zeros adalah sebuah fungsi transfer yang menyediakan untuk perhitungan dasar penting pada karakteristik respon sistem, tanpa harus menyelesaikan Parsial Differential Equation (PDE). Sesuai definisi, fungsi transfer adalah fungsi rasional dalam variabel kompleks :
𝑠 = 𝜎 + 𝑗𝓌 (2.31)