REALISASI ROBOT PENDETEKSI
LOGAM
Disusun Oleh:
Ade Tjandra Sugandi
0322118
Jurusan Teknik Elektro, Fakultas Teknik, Universitas Krtisten Maranatha, Jl. Prof.Drg.Suria Sumantri, MPH no.65, Bandung, Indonesia,
email : [email protected]
ABSTRAK
Perkembangan Robotika yang mendunia membuat manusia di berbagai pelosok mengadu kreatifitasnya. Robot adalah suatu mesin yang digunakan manusia dalam melaksanakan pekerjaan yang dirasakan sulit dan di luar kemampuan. Misalnya, untuk pekerjaan-pekerjaan yang berhubungan dengan benda berat, benda beracun, bahan peledak, dan tempat yang sulit dijangkau oleh manusia.
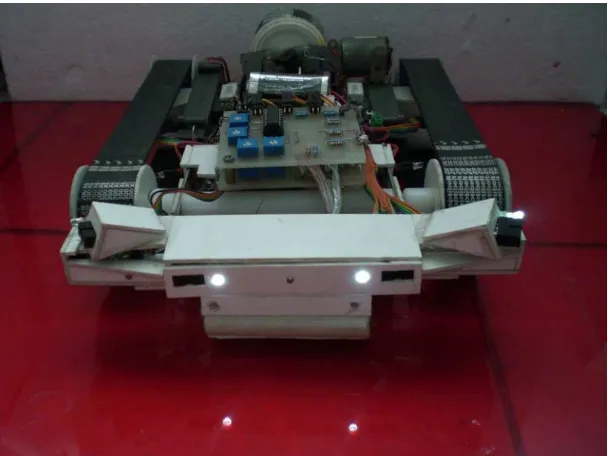
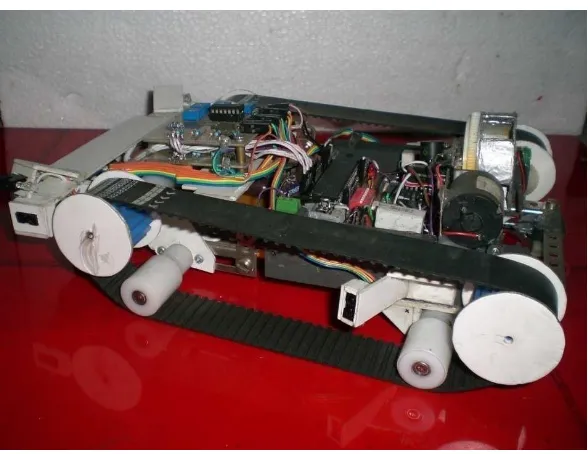
Pada tugas akhir ini telah dibuat robot pencari dan pendeteksi logam beroda menyerupai tank. Robot yang menggunakan ATmega16 sebagai mikrokontroler ini dilengkapi dengan delapan buah sensor optocoupler untuk mengetahui keberadaan rintangan, memperbaiki posisi, dan gerakan robot untuk menelusuri suatu area. Satu buah sensor logam untuk mendeteksi logam dimana dalam area tersebut tertanam tiga buah logam yang harus dideteksi dan ditandai lokasinya oleh robot. Setelah robot berhasil mendeteksi logam, robot akan menjatuhkan penanda pada lokasi tersebut dan melanjutkan pendeteksian hingga ketiga logam terdeteksi..
Universitas Kristen Maranatha ii
Electrical Engineering, Maranatha Cristian University, Jl. Prof.Drg.Suria Sumantri, MPH no.65, Bandung, Indonesia,
email : [email protected]
Abstract
Massive robotic development made human in the entire world compete their creativity. Robot is a machine which human use to do tough tasks and things beyond their ability. For example, for tasking which connected with heavy things, toxic, blasting material, and to reach places which impossible for human.
For this final assignment, has been made a wheel metal detector finder which physically look alike tank. Robot which uses ATmega16 as microcontroller is modified with eight optocoupler sensors to detect barrier, setting up the position, and robot movement to explore one area. One metal detector to detect the presence of metal in that area planted three metals that should be detected and marked the position by robot. After detecting the metal, robot will make a sign in the certain position and continuing the detection till the third metal detected.
DAFTAR ISI
ABSTRAK ... i
ABSTRACT ... ii
KATA PENGANTAR ... iii
DAFTAR ISI ... v
DAFTAR GAMBAR ... v
DAFTAR TABEL ... ix
BAB I PENDAHULUAN ... 1
I.1 Latar Belakang ... 1
I.2 Identifikasi Masalah ... 2
I.3 Tujuan ... 2
I.4 Pembatasan Masalah ... 2
I.5 Spesifikasi Alat ... 3
I.6 Sistematika Penulisan ... 3
BAB II LANDASAN TEORI ... 5
II.1 Rajau darat ... 5
II.2 Sensor ... 6
II.2.1 Sensor optocoupler ... 7
II.2.2 Sensor logam ... 9
II.2.2 Motor DC ... 9
II.2.2 Mikrokontroler ... 10
BAB III PERANCANGAN DAN REALISASI ALAT ... 14
III.1 Konsep perancangan ... 14
III.1.1 Cara kerja ... 16
III.2 Perakitan Perangkat Keras ... 16
III.2.1 Konstruksi ... 17
III.2.2 Rangkaian sensor optocoupler ... 17
III.2.3 Rangkaian sensor logam ... 19
III.2.4 Rangakaian mikrokontroler ATmega16 ... 20
Universitas Kristen Maranatha iv
BAB IV DATA PENGAMATAN DAN ANALISA ... 25
IV.1 Pengujian software ... 25
IV.1.1 Inisialisasi Port Dari ATMega 16 ... 25
IV.1.2 Program Utama ... 26
IV.2 Pengujian sensor optocoupler ... 36
IV.3 Navigasi ... 37
IV.4 Pengujian sensor logam ... 40
IV.5 Pengujian Terhadap Tingkat Keberhasilan Robot ... 44
BAB V KESIMPULAN DAN SARAN ... 47
V.1 Kesimpulan ... 47
DAFTAR GAMBAR
Gambar II.1 Contoh ranjau darat ... 5
Gambar II.2 Contoh sensor Optocoupler ... 7
Gambar II.3 Diagram Blok Sensor Optocoupler ... 7
Gambar II.4 LED inframerah dan Photodioda ... 8
Gambar II.5 Simbol Photodioda... 9
Gambar II.6 Cara Kerja Motor DC ... 10
Gambar II.7 Arsitektur ATMega16 ... 11
Gambar II.8 Pin ATMega16 ... 12
Gambar III.1 Diagram Blok Robot ... 14
Gambar III.2 Letak Sensor Optocoupler ... 15
Gambar III.3 Diagram Alir Cara Kerja Robot ... 16
Gambar III.4 Model Prespektif Robot ... 17
Gambar III.5 Rangkaian Transmitter ... 18
Gambar III.6 Rangkaian Receiver ... 18
Gambar III.7 Rangkaian Sensor Logam ... 19
Gambar III.8 Rangkaian Mikrokontroler ATmega 16 ... 20
Gambar III.9 Flowchart Program Utama ... 22
Gambar III.10 Flowchart Subroutine Koreksi ... 23
Gambar III.11 Flowchart Subroutine Belok Kanan ... 23
Gambar III.12 Flowchart Subroutine Belok Kiri ... 24
Gambar IV.1 Inisialisasi Port ... 26
Gambar IV.2 Robot Bergerak Maju ... 26
Gambar IV.3 Memeriksa Sensor Logam ... 27
Gambar IV.4 Penanda Aktif ... 27
Gambar IV.5 Memeriksa Sensor Depan. ... 28
Gambar IV.6 Subroutine koreksi ... 29
Gambar IV.7 Robot Bergeser Ke Kanan ... 29
Gambar IV.8 Bergeser Ke Kiri ... 30
Universitas Kristen Maranatha vi
Gambar IV.10 Robot Bergerak Mundur ... 31
Gambar IV.11 Robot Bergerak Belok Kiri. ... 32
Gambar IV.12 Robot Bergerak Maju ... 32
Gambar IV.13 Robot Bergerak Belok Kiri ... 33
Gambar IV.14 Subroutine belok kanan ... 33
Gambar IV.15 Robot Bergerak Mundur ... 34
Gambar IV.16 Robot Bergerak Belok Kanan ... 34
Gambar IV.17 Robot Bergerak Maju ... 35
Gambar IV.18 Robot Bergerak Belok Kanan ... 35
Gambar IV.19 Cara pengambilan data ... 36
Gambar IV.20 Belok Kanan... 38
Gambar IV.21 Belok Kiri ... 39
Gambar IV.22 Koreksi Robot ... 39
Gambar IV.23 Pengujian sensor logam ... 42
Gambar IV.24 Labirin yang akan Dilalui Robot ... 44
DAFTAR TABEL
Tabel III.1 Pergerakkan Roda Berdasarkan Masukkannya ... 21
Tabel IV.1 Pengamatan Sensor optocoupler terhadap jarak ... 37
Tabel IV.2 Pengamatan Sensor Logam ... 40
Tabel IV.3 Pengamatan Sensor Logam dengan spons sebagai medium ... 41
Tabel IV.4 Pengamatan Sensor Logam dengan kayu sebagai medium ... 41
Tabel IV.5 Data pengamatan dengan enam jenis logam ... 43
LAMPIRAN A
Gambar A.1 Foto Robot Tampak Samping Depan
Universitas Kristen Maranatha
Gambar A.3 Foto Robot Tampak atas
LAMPIRAN B
Universitas Kristen Maranatha
/*****************************************************
This program was produced by the
CodeWizardAVR V1.25.3 Standard
Automatic Program Generator
© Copyright 1998-2007 Pavel Haiduc, HP InfoTech s.r.l.
*****************************************************/
#include <mega16.h>
#include <delay.h>
// Declare your global variables here
eeprom int i=0;
int ax;
void koreksi(void)
{if (PINA.5 == 1 || PINA.6 ==1) //optokopler pendek kiri ada halangan
// Declare your local variables here
// Input/Output Ports initialization
// Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In
Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In
Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTB=0x00;
DDRB=0xFF;
// Port C initialization
// Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out
Func1=Out Func0=Out
// State7=0 State6=0 State5=0 State4=0 State3=0 State2=0 State1=0 State0=0
PORTC=0x00;
DDRC=0xFF;
Universitas Kristen Maranatha
// Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out
Func1=Out Func0=In
// State7=0 State6=0 State5=0 State4=0 State3=0 State2=0 State1=0 State0=T
PORTD=0x00;
DDRD=0xFE;
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: Timer 0 Stopped
// Mode: Normal top=FFh
// OC0 output: Disconnected
TCCR0=0x00;
TCNT0=0x00;
OCR0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: Timer 1 Stopped
// Mode: Normal top=FFFFh
// OC1A output: Discon.
// OC1B output: Discon.
// Input Capture on Falling Edge
// Timer 1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1A=0x00;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer 2 Stopped
// Mode: Normal top=FFh
Universitas Kristen Maranatha ASSR=0x00;
TCCR2=0x00;
TCNT2=0x00;
OCR2=0x00;
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
// INT2: Off
MCUCR=0x00;
MCUCSR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x00;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;
SFIOR=0x00;
Universitas Kristen Maranatha ax++;
};
if (PINA.0 == 1 || PINA.1 == 1) //cek sensor depan
{if (PINA.2 == 1) //cek sensor kiri
{belok_kiri();
}
else
{belok_kanan();
};
};
koreksi();
};
PORTC = 0x00;
LAMPIRAN C
Universitas Kristen Maranatha
Universitas Kristen Maranatha
Universitas Kristen Maranatha 1
BAB I
PENDAHULUAN
Pada bab ini akan dibahas mengenai latar belakang, identifikasi masalah, maksud dan tujuan, pembatasan masalah, dan sistematika penulisan.
1.1 Latar Belakang
Perkembangan dunia semakin pesat terjadi di berbagai bidang, dan teknologi merupakan salah satu perkembangan yang semakin ditekuni. Dengan segala keterbatasan manusia dalam melakukan aktivitas yang di luar kemampuannya, maka diciptakanlah robot.
Robot adalah gabungan dari mekanik dengan elektronika yang dapat diprogram untuk bergerak, menggerakkan objek, dan saling berinteraksi dengan lingkungannya. Robot dapat melaksanakan tugas secara berulang dengan cepat dan teliti bila dibandingkan manusia. Robot adalah suatu mesin yang digunakan manusia dalam melaksanakan pekerjaan yang dirasakan sulit dan di luar kemampuan. Misalnya, untuk pekerjaan-pekerjaan yang berhubungan dengan benda berat, benda beracun, dan bahan peledak.
BAB I PENDAHULUAN 2
I.2Identifikasi Masalah
Identifikasi masalah dalam tugas akhir ini adalah bagaimana membuat sebuah robot yang dapat mendeteksi dan menentukan lokasi logam yang ditanam di bawah permukaan labirin.
I.3Tujuan
Tujuan dari tugas akhir ini adalah merancang dan membuat robot yang dapat mendeteksi dan menentukan lokasi logam yang ditanam di bawah permukaan pada suatu medan atau labirin tertentu.
I.4Pembatasan Masalah
Dalam tugas akhir ini, dibatasi dengan hal-hal berikut:
1. Waktu pencarian tidak ditentukan.
2. Ranjau darat diwakili oleh logam besi berbentuk tabung dengan diameter
14.5cm dan tebal 2cm.
3. Robot menelusuri lokasi dengan bantuan sekat berupa dinding vertikal.
4. Robot meninjau logam yangberjumlah 3buah.
5. Logam diletakan pada kedalaman ±3 cm di bawah permukaan jalur labirin
yang dilalui.
6. Luas area atau medan dibatasi dengan ukuran 150cm x 180cm.
BAB I PENDAHULUAN 3
Universitas Kristen Maranatha
I.5 Spesifikasi Alat yang Digunakan
Spesifikasi alat yang digunakan dalam Tugas Akhir ini adalah :
• Mikrokontroler ATMega16
• Sensor optocoupler sebanyak delapan buah sebagai pendeteksi sekat atau
halangan berupa dinding
• Sensor Logam sebagai pendeteksi logam
• LM339 sebagai komparator
• Motor DC sebanyak tiga buah. Dua buah motor untuk menggerakkan roda
robot dan satu buah motor penanda adanya logam
• L293D sebagai penguat arus motor
I.6Sistematika Penulisan
Sistematika penulisan dalam tugas akhir ini adalah sebagai berikut :
BAB I PENDAHULUAN
Berisi latar belakang, identifikasi masalah, maksud dan tujuan, pembatasan masalah, dan sistematika penulisan.
BAB II LANDASAN TEORI
Berisi teori-teori yang menunjang dalam pembuatan robot. Teori yang dimaksud adalah pengetahuan tentang sensor, motor DC, serta mikrokontroler.
BAB III PERANCANGAN DAN REALISASI
Berisi implementasi, perancangan dan pembuatan robot baik hardware maupun
software meliputi diagram blok, cara kerja robot, rangkaian sensor, rangkaian
BAB I PENDAHULUAN 4
BAB IV DATA PENGAMATAN DAN ANALISA
Berisi pengamatan dan analisis terhadap alat yang telah dirancang meliputi
pengujian perangkat lunak, pengujian jarak jangkauan sensor optocoupler, sensor
logam, dan pengujian tingkat keberhasilan robot dalam meninjau.
BAB V KESIMPULAN
Universitas Kristen Maranatha 47
BAB V
KESIMPULAN DAN SARAN
Pada bab ini akan diuraikan mengenai kesimpulan dan saran yang
didasarkan pada hasil pengamatan dari percobaan yang telah dilakukan.
V.1 Kesimpulan
Kesimpulan yang didapat dari tugas akhir ini sebagai berikut :
1. Robot pendeteksi logam dapat direalisasikan dengan menggunakan
mikrokontroler ATmega16,sensor optocoupler, dan sensor logam dengan
keberhasilan 66.66%.
2. Robot dapat mendeteksi dan menentukan posisi logam pada suatu labirin
bersekat dengan persentase 66.66%.
3. Terdapat beberapa faktor yang dapat mengganggu kerja dari robot, yaitu
terdapat sumber infrared lain dalam ruangan yang dapat mengganggu kerja
dari sensor, dan sumber catu daya berupa baterai isi ulang yang mudah
habis.
V.2 Saran
Untuk pengembangan selanjutnya disarankan :
1. Sensor infra merah untuk mendeteksi ada tidaknya halangan dapat diganti
dengan sensor ultrasonik sehingga tidak dipengaruhi oleh cahaya
lingkungan sekitar.
2. Agar tidak dipengaruhi cahaya lain sensor infra merah dapat dilakukan
pengkodekan seperti pada remote TV, dengan memfokuskan pancaran
sinarnya ataupun dengan mengkombinasikan keduanya.
3. Sistem sensor perlu disempurnakan agar lebih dapat membedakan antara
DAFTAR PUSTAKA
1. Albert Paul Malvino, Ph.D, Prinsip-Prinsip Elektronika, edisi kedua,
Erlangga tahun 1996
2. Felix Gunarto ST., Tugas Akhir : “Realisasi Robot Beroda Tiga Pencari
Dan Pemadam Api Lilin Menggunakan Air”
3. http://www.datasheet4u.com, Januari 2007
4. History Metal detector - Wikipedia, the free encyclopedia.mht
5. http://www.POPTRONICS Continuity Tester.mht
6. Sujono : Meningakatkan kinerja Infrared optocoupler Dengan Teknik
Modulasi Cahaya
7. Wardhana, Lingga, Belajar Sendiri Mikrokontroler AVR Seri ATMega