SKRIPSI – ME141501
ANALISA PERBANDINGAN KEUNGGULAN KAPAL TUNDA
MENGGUNAKAN PROPULSI ELEKTRIK DENGAN PROPULSI MEKANIS
Alfrian Yoga NRP. 4212 100 035
Dosen Pembimbing Ir. Sardono Sarwito, M.Sc Dr. Eddy Setyo K, ST, M.Sc
DEPARTEMEN TEKNIK SISTEM PERKAPALAN Fakultas Teknologi Kelautan
Institut Teknologi Sepuluh Nopember Surabaya
UNDERGRADUATE THESIS – ME141501
ANALYSIS OF COMPARATIVEBENEFITSOF TUGBOAT USING ELECTRICAL PROPULSION WITH MECHANICAL PROPULSION
Alfrian Yoga NRP. 4212 100 035
Supervisor
Ir. Sardono Sarwito, M.Sc. Dr. Eddy Setyo K, ST, M.Sc
DEPARTMENT OF MARINE ENGINEERING Faculty of Marine Technology
Sepuluh Nopember Institute of Technology Surabaya
ii
iv
v
ANALISA PERBANDINGAN KEUNGGULAN KAPAL TUNDA MENGGUNAKAN PROPULSI ELEKTRIK DENGAN PROPULSI MEKANIS
Nama Mahasiswa : Alfrian Yoga
NRP. : 4211240000035
Departemen : Teknik Sistem Perkapalan Dosen Pembimbing : Ir. Sardono Sarwito, M.Sc.
Dr. Eddy Setyo K, ST, M.Sc.
ABSTRAK
Pemilihan sistem propulsi adalah salah satu pertimbangan dasar dalam merancang sebuah kapal. Tetapi hal ini dapat menjadi sangat sulit untuk memuaskan dan mencapai semua kebutuhan secara simultan. Bagaimanapun harus dibuat sebuah design dari sistem yang paling optimal yang memiliki sebanyak mungkin faktor-faktor yang menguntungkan. Untuk itu sangat penting mengetaahui keunggulan dan kekurangan pada setiap tipe – tipe propulsi, seperti propulsi elektrik dan mekanis ini. Pada tugas akhir ini dilakukanlah Analisa terhadap perbandingan keunggulan kapal yang menggunakan propulsi elektrik dengan propulsi mekanis. Dalam hal ini objek yang ingin dianalisa untuk dibandingkan sistem propulsinya berjenis kapal tunda. Dari hasi Analisa daya yang dibutuhkan kapal tunda berpenggerak propulsi elektrik untuk mencapai kecepatan 8 knot adalah sebesar 507,196 kW atau 680,150 Hp, dengan catatan kapal tunda propulsi elektrik 750 GT. Sedangkan daya yang dibutuhkan kapal tunda berpenggerak propulsi mekanis untuk mencapai kecepatan 8 knot adalah sebesar 97,61 kW atau 130,9 Hp. Dengan catatan kapal tunda propulsi mekanis 30 GT. Dari data analisa grafik antara pengaruh besarnya putaran motor terhadap torsi disimpulkan bawasannya torsi kapal tunda berpenggerak propulsi elektrik lebih tinggi dibandingkan dengan kapal tunda berpenggerak propulsi mekanis. Hal ini dibuktikan karena pada putaran 12 RPS, besar torsi pada kapal tunda berpenggerak propulsi elektrik adalah sebesar 18.500 kW/s dan torsi pada kapal tunda berpenggerak propulsi mekanis adalah 5.100 kW/s. Dan dari data analisa grafik antara pengaruh besarnya power terhadap torsi disimpulkan bawasannya torsi kapal tunda berpenggerak propulsi elektrik lebih tinggi dibandingkan dengan kapal tunda berpenggerak propulsi mekanis. Hal ini dibuktikan karena pada daya 300.000 kW, besar torsi pada kapal tunda berpenggerak propulsi elektrik adalah sebesar 1.600 kW/s dan torsi pada kapal tunda berpenggerak propulsi mekanis adalah 2.400 kW/s
vi
vii
ANALYSIS OF COMPARATIVE BENEFITS OF TUGBOAT USING ELECTRICAL PROPULSION WITH MECHANICAL PROPULSION
Name : Alfrian Yoga
NRP. : 04211240000035
Department : Marine Engineering Supervisor : Ir. Sardono Sarwito, M.Sc.
Dr. Eddy Setyo K, ST, M.Sc.
Abstract
The selection of a propulsion system is one of the basic considerations in designing a ship. But it can be very difficult to satisfy and reach all needs simultaneously. However, there should be a design of the most optimal system that has as many possible beneficial factors as possible. It is important to know the advantages and disadvantages of each type of propulsion, such as electrical and mechanical propulsion.In this final project conducted an analysis of the comparison of the advantages of ships that use electric propulsion with mechanical propulsion. In this case the object to be analyzed to compare propulsion system type tug boat. From the analysis,The required power of an electrically propulsion tugboat to reach a speed of 8 knots is 507,196 kW or 680,150 Hp, with a record of 750 GT electric propulsion tugs. Whereas the required power of a mechanical propulsion tugboat to achieve a speed of 8 knots is 97,61 kW or 130,9 Hp. With a record of 30 GT mechanical propulsion tugs. From the graphical analysis data between the influence of the rotation of the motor to the torque, it is concluded that the torque of the electrically propulsion tugboat torque is higher than that of a mechanical propulsion tug. This is evidenced because at the rotation 12 RPS, the torque of the electric propulsion tugboat is 18.500 kW / s and the torque on a mechanically propulsion tugboat is 5.100 kW / s. And from the graphical analysis data between the influence of the power to torque, it is concluded that the torque of the electrically propulsion tugboat torque is higher than that of the propulsion-driven tugboards. This is evidenced because at a power of 300.000 kW, a scale of torque on electric propulsion tugboat is 1.600 kW / s and the torque on a mechanically propulsion tugboat is 2.400 kW / s
viii
ix
KATA PENGANTAR
Puji Tuhan Yang Maha Esa atas semua nikmat yang telah diberikan. Karena atas berkat dan rahmat-Nya penulis dapat menyelesaikanskripsi yang berjudul “Analisa Perbandingan Keunggulan Kapal Tunda Menggunakan Propulsi Elektrik dengan Propulsi Mekanis” dengan baik dalam rangka memenuhi syarat padaMata Kuliah Skripsi (ME141501) Departemen Teknik Sistem Perkapalan, Fakultas Teknologi Kelautan, ITS.
Selama proses penyusunan skripsi ini penulis menyadari bahwa bukan hanya karena usaha penulis semata, tetapi penulis telah banyak menerima bantuan, dorongan, dukungan, dan bimbingan dari banyak pihak. Berkaitan dengan hal itu maka perkenankanlah penulis untuk mengucapkan terima kasih kepada :
1. Tuhan Yang Maha Esa yang telah memberikan pengalaman hidup yang luar biasa dan tak ternilai harganya.
2. Ibu dan ayah,besertaadik - adik tercinta, sahabat, rekan dan teristimewa untuk pacarsebagai orang yang luar biasa dan terbaik yang pernah hadir sepanjang kehidupan penulis. Yang senantiasamemberikan doa, dukungan moral, cinta kasih dan meterial kepada penulis.
3. Bapak Dr.Eng. M. Badrus Zaman, S.T., M.T. dan BapakSemin, S.T., M.T., Ph.D. selaku Kepala dan Sekretaris Departemen Teknik Sistem Perkapalan FTK – ITS. 4. Bapak Ir. Sardono Sarwito, M.Sc. selaku dosen pembimbing dan dosen waliyang
telahmembimbing dan memberikan banyak masukan selamaproses penyusunan skripsi beserta dengan Bapak Dr. Eddy Setyo K, ST, M.Sc.
5. Segenap civitas akademika yang telah menyampaikan ilmudan berbagai pengalaman selama penulis melaksanakan studidi Departemen Teknik Sistem Perkapalan FTK – ITS.
6. Keluarga Bismarck ’12 yang selalu menemani dan memberikan semangat dalam menyelesaikan studi di Departemen Teknik Sistem Perkapalan FTK – ITS.
7. Seluruh teknisi, member dan grader Laboraturium Marine Electricaland Automation System (MEAS) yang telah memberikandukungan dan bantuan kepada penulis selama prosespenyusunan skripsi.
Tentunya masih terdapat banyak hal yang perlu disempurnakan dalam pengerjaan skripsi ini, sehingga segala bentuk kritik dan saran yang membangun akan selalu penulis jadikan semangat untuk koreksi diri yang lebih baik. Akhir kata, semoga pengerjaan skripsi ini dapat memberikan banyak manfaat yang nyata bagi para penggunanya.
x
xi
DAFTAR ISI
LEMBAR PENGESAHAN ... Error! Bookmark not defined.
ABSTRAK ... v
KATA PENGANTAR ... ix
DAFTAR ISI ... xi
DAFTAR GAMBAR ... xiii
DAFTAR GRAFIK ... xv
DAFTAR TABEL ... xvii
BAB I ... 1 PENDAHULUAN ... 1 1.1. Latar Belakang ... 1 1.2. Perumusan Masalah ... 2 1.3. Batasan Masalah ... 2 1.4. Tujuan ... 2 1.5. Manfaat ... 2 BAB II ... 3
2.1. Penjelasan Umum Kapal Tunda ... 3
2.2. Tipe Kapal Tunda Berdasarkan Fungsi ... 3
2.3. Tipe Kapal Tunda Berdasarkan Sistem Propulsinya ... 4
2.4. Sistem Propulsi Kapal ... 6
2.5. Jenis - Jenis Sistem Propulsi Kapal ... 7
2.6. Propulsi Elektrik ... 8
2.7. Motor DC dan AC Sebagai Penggerak Kapal ... 9
2.7.1 Distribusi Power ... 11
2.7.2 Karakteristik Motor Listrik DC ... 11
2.8. Skema atau Gambar Diagram Sistem Propulsi Elektrik ... 13
2.9. Keuntungan dan Kerugian Elektrik Propulsi ... 14
BAB III ... 17
3.1. Studi Literatur ... 17
3.2. Survey Lapangan ... 17
3.3. Pengumpulan Data ... 17
3.4. Perhitungan Tahanan Kapal ... 17
3.5. Perhitungan Daya Main Engine ... 19
3.6. Perhitungan Torsi Pada motor ... 20
3.7. Penarikan Kesimpulan ... 20
BAB IV ... 23
4.1 Data Kapal Berpenggerak Propulsi Elektrik ... 23
4.2. Perhitungan Tahanan Kapal Kapal Berpenggerak Propulsi Elektrik ... 24
4.3. Perhitungan Daya yang Diperlukan Kapal Propulsi Elektrik ... 27
4.3.1 Perhitungan Performa Daya pada Variasi 8 knot ... 29
4.4 Data Kapal Berpenggerak Propulsi Mekanis ... 30
4.5. Perhitungan Tahanan Kapal Kapal Berpenggerak Propulsi Mekanis ... 30
4.6. Perhitungan Daya yang Diperlukan Kapal Propulsi Mekanis ... 33
xii BAB V ... 41 5.1 Kesimpulan ... 41 5.2. Saran ... 42 DAFTAR PUSTAKA ... 43 LAMPIRAN ... 45
xiii
DAFTAR GAMBAR
Gambar 2.1 Tug boat atau Kapal tunda….……….. 3
Gambar 2.2 Harbour Tug………..……… 4
Gambar 2.3 Sea Going and Salvages Tug………..……….. 4
Gambar 2.4 Azimut Stern Drive System……….………. 5
Gambar 2.5 Voith Water Tractor Tugs System ……… 5
Gambar 2.6 Komponen Utama Sistem Propulsi Kapal………. 6
Gambar 2.7 Skema System Propulsi Konvensional………. 10
Gambar 2.8 Skema System Propulsi DEP……… 11
Gambar 2.9 Power Flow Pada System Propulsi Elektrik……….. 13
Gambar 3.1 Flow Chart Diagram………. 21
Gambar 4.1 Body Plan KM. Tarik……… 31
Gambar 4.2 Data Pada Maxsurf……… 31
Gambar 4.3 Hasil Data Berupa Tahanan dan Daya……….. 32
Gambar 4.4 Resistance vs Speed……….. 32
xiv
xv
DAFTAR GRAFIK
Grafik 4.1 Interporasi……… 25
Grafik 4.2 Interporasi Tahanan Tambahan……… 26
Grafik 4.3 Putaran vs Torsi……… 35
Grafik 4.4 Torsi vs Power……….. 37
xvi
xvii
DAFTAR TABEL
Tabel 4.1 Interporasi……… 25
Tabel 4.2 Interporasi Tahanan Tambahan……… 26 Tabel 4.3 Variasi Putaran vs Torsi Kapal Propulsi Elektrik………… 36 Tabel 4.4 Variasi Putaran vs Torsi Kapal Propulsi Mekanis………... 36 Tabel 4.5 Variasi Torsi vs Power Kapal Propulsi Elektrik………….. 37 Tabel 4,6 Variasi Torsi vs Power Kapal Propulsi Mekanis…………. 37 Tabel 4.7 Variasi Power vs Putaran Kapal Propulsi Elektrik……….. 38 Tabel 4.8 Variasi Power vs Putaran Kapal Propulsi Mekanis………. 39
xviii
1
BAB I
PENDAHULUAN
1.1. Latar BelakangIndonesia merupakan negara maritim dengan luas laut dua per tiga dari
total luas wilayahnya. Laut beserta hasil yang terkandung didalamnya
akan dapat mensejaterakan rakyat jika dimanfaatkan secara optimal,
namun sebaliknya laut dapat pula menjadi ancaman kehidupan manusia
jika tidak dijaga kelestariannya. Sehingga melalui pengembangan konsep
sistem propulsi diesel-elektrik, energi listrik yang dihasilkan tersebut
dapat digunakan semaksimal mungkin pada kapal, hal ini pula dapat
mengurangi ketergantungan akan energi yang bersumber dari bahan fosil
dan sekaligus mengurangi jumlah CO2 yang dibuang ke udara. Pada
Awalnya propulsi diesel-elektrik merupakan sebuah tipe propulsi
penggerak kapal yang sangat mahal dan kurang effisien, disamping
dimensi dan berat motor DC yang relatif besar. Kapal dengan
mengunakan propulsi diesel-lektrik memiliki dua sistem elektrik
terpisah, pertama berfungsi untuk menyuplai energi pada penggerak
kapal dan kedua untuk menyuplai energi penggerak pada pemesinan
bantu (seperti pompa serta sumber penerangan dikapal). Namun seiring
dengan perkembangan teknologi, khususnya teknologi converter
(perubahan arus searah (DC) ke arus bolak balik (AC) atau sebaliknya)
menjadikan sistem propulsi diesel-elektrik lebih fleksible, dan hal
tersebut memungkinkan untuk pengunaan sistem elektrik dengan
kapasitas tenaga yang tak terbatas. Sistem propulsi diesel-listrik
memiliki sejumlah keuntungan dibandingkan sistem propulsi diesel
mekanik, selain dapat mengurangi konsumsi bahan bakar, sistem
propulsi elektrik lebih murah dari segi perawatan, memiliki pengaturan
sistem penggerak yang lebih fleksible, pada kasus tertentu kapal tidak
memerlukan gearbox, memiliki getaran serta tingkat kebisingan yang
rendah, kemampuan manuver yang tinggi (khususnya pada pengunaan
propulsi azimuthing podded). Namun sistim propulsi kombinasi
memiliki biaya inverstasi yang cukup tinggi dikarenakan adanya
penambahan sejumlah komponen seperti diesel generator, transformer,
dan motor listrik. Selain itu pada kondisi normal (full load) sistem
propulsi diesel-elektrik memiliki efisiensi kerja yang lebih rendah
2
dibanding pengunaan sistim propulsi diesel-mekanik, hal tersebut dapat
menyebabkan pengunaan bahan bakar akan lebih besar. Namun
sebaliknya pada kondisi dengan perubahan beban operasi (under 25%
part load) sistem propulsi diesel-elektrik memiliki efisiensi kerja yang
lebih tinggi dibanding pengunaan sistim propulsi diesel-mekanik
(Oberhokamp, 2007).
1.2. Perumusan Masalah
Dalam
tugas
akhir
ini
akan
memfokuskan
terhadap
menganalisaperbandingan keunggulan dalam menggunakan propulsi elektrik
dan diesel pada kapal tunda seperti performa daripada kedua sistem propulsi,
torsional, getaran, serta besarnya rpm yang berlaku pada system tersebut.
1.3. Batasan Masalah
Untuk dapat menghindari permasalahan yang terlalu luas dalam sebuah
pembahasan, maka perlu diadakan pembatasan-pembatasan sebagai berikut :
1. Menganalisainstalasi pada propulsi elektrik dengan diesel
2. Menganalisa operasional pada propulsi elektrik dengan diesel
3. Tidak membahas biaya
1.4. Tujuan
Tujuan penulisan tugas akhir ini adalah mengetahui perbandingan keunggulan pada propulsi elektrik maupun diesel pada kapal tunda seperti:
• Performa daya dan kecepatan daripada kedua sistem propulsi. • torsional yang berlaku pada kedua sistem propulsi.
• besarnya rpm yang berlaku pada sistem tersebut.
1.5. Manfaat
Adapun manfaat yang dapat diperoleh dari penulisan tugas akhir adalah :
1. Dapat beralih ke energi alternatif dan tidak hanya berpatokan pada
konsumsi penggunaan bahan bakar.
2. Memperoleh perbandingan data-data yang mendukung untuk
pemilihan instalasi/pengadaan sistem propulsi.
3
BAB II
TINJAUAN PUSTAKA
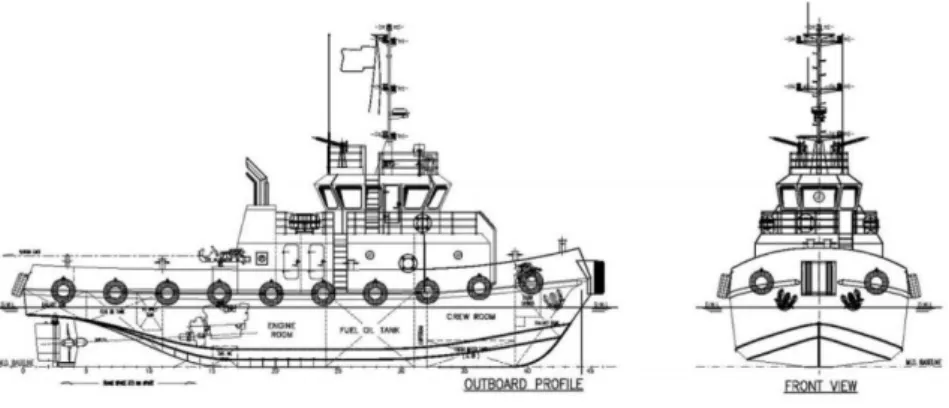
2.1. Penjelasan Umum Kapal Tunda
Gambar 2.1 Tug boat atau Kapal Tunda
Kapal tunda (tugboat) adalah kapal yang dapat digunakan untuk melakukan manuver / pergerakan, utamanya menarik atau mendorong kapal lainnya di pelabuhan, laut lepas atau melalui sungai atau terusan. Kapal tunda digunakan pula untuk menarik tongkang, kapal rusak, dan peralatan lainnya.Kapal tunda memiliki kemampuan manuver yang tinggi, tergantung dari unit penggerak. Kapal Tunda dengan penggerak konvensional memiliki baling-baling di belakang, efisien untuk menarik kapal dari pelabuhan ke pelabuhan lainnya.
2.2. Tipe Kapal Tunda Berdasarkan Fungsi
Tipe Tugboat dibagi menjadi beberapa fungsi, antara lain : 1. Harbour Tugs
Harbour tugs atau kapal tunda pelabuhan hanya beroperasi di pelabuhan saja. Harbour Tugs ni mempunyai ukuran yang lebih kecil bila dibandingkan dengan Sea Going Tugs. Perbandingan rasio lebar dan panjangnya juga tinggi karena dibutuhkan untuk draft yang rendah. Harbor Tugs hanya diawaki oleh sedikit kru yakni Kapten dan Kelasi. Jumlah Tugboat dalam pelabuhan bervariasi tergantung dari insfrastruktur pelabuhan dan jenis Tugboat.
4
2.2 Harbour Tug 2. Harbour dan Sea Going Tugs
Harbor dan Sea going Tugs merupakan Tugboat yang berfungsi untuk beroperasi di Pelabuhan maupun di laut lepas. Ukurannya lebih besar dibandingkan dengan Harbour Tugs
3. Sea Going dan Salvages Tugs
Sea Going dan Salvages Tugs dirancang khusus untuk penyelamatan saat dilakukan towing. Selain itu, Tugboat ini juga digunakan untuk membantu pekerjaan non darurat seperti menarik bangunan lepas pantai. Tugboat ini memiliki tenaga yang paling besar dibandingkan dengan Tugboat yang lain. Sangat panjang dan memiliki draft yang tinggi serta displasmen yang besar bila dibandingkan dengan Harbour Tugs.
2.3 Sea Going and Salvages Tugs 2.3. Tipe Kapal Tunda Berdasarkan Sistem Propulsinya
Tipe Tugboat berdasarkan sistem propulsinya antara lain : 1. Conventional Tugs
Tugboat tipe konvensional saat ini tertuju pada Single Screw Tugs dan Twin Screw Tugs. Desain ini bisa tahan lama dan sudah terbukti. Keuntungannya juga sangat
5
komplek seperti Voith Schneider dan Azimuth atau Schottle, konsumsi bahan bakar yang lebih rendah dan cocok untuk penundaan jarak jauh.
2. ASD (Azimuth Stern Drive) Tugs
Sistem propulsi jenis ini mempunyai Kort Nozzle pada propelernya. Propeler masih berputar pada sumbu hozisontal. Kort Nozzle dan propeler dapat berputar hingga 360o terhadap sumbu vertikal, sehingga tidak diperlukan rudder lagi untuk kemampuan olah geraknya.
2.4 Azimuth Stern Drive Tugs System 3. VWT (Voith Water Tractor) Tugs
VWT Tugs juga dikenal dengan sebutan balingbaling poros vertikal yang jumlahnya enam atau delapan buah. System ini berputar pada sumbu horizontal. System propulsi jenis ini tidak diperlukan rudder lagi karena baling-balingnya berfungsi sebagai rudder.
6
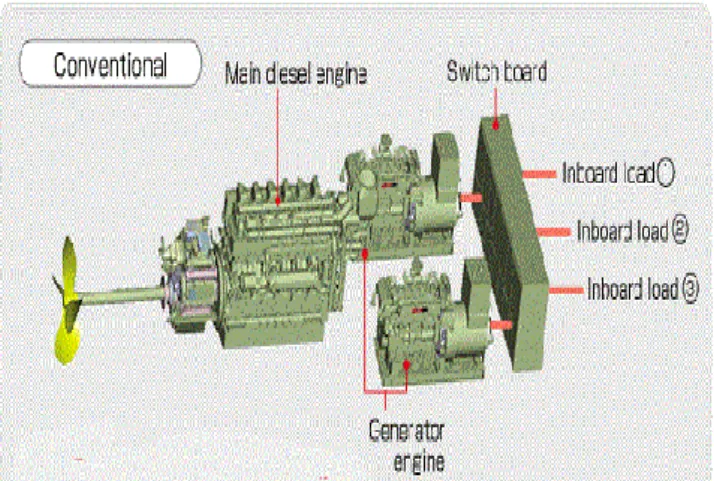
2.4. Sistem Propulsi Kapal
2.6 Komponen Utama Sistem Propulsi Kapal
Secara prinsif sistem propulsi terdiri dari tiga bagian utama yaitu: pengerak utama (main engine), sistem transmisi (gear box) dan alat penggerak kapal (propeller). Perancangan ketiga bagian ini sangat tergantung dari tipe kapal, ukuran utama, kecepatan kapal, model lambung serta model buritan kapal. Karena itu, kapal, mesin penggerak, dan baling-baling harus dipandang sebagai suatu sistem yang utuh dan memiliki paduan yang terbaik. Permasalahan klasik yang biasanya timbul dalam perancangan sistem propulsi adalah tidak terpenuhinya kecepatan dinas yang direncanakan meskipun pada perhitungan telah terpenuhi. Sebagai contoh adalah kasus kapal ikan Mina Jaya dimana hasil sea trial menunjukan untuk pemakaian bahan bakar 100%, hanya mencapai 960 rpm dari 1000 rpm yang direncanakan sehingga kecepatan dinas tidak tercapai. Sehingga dalam menganalisa sistem propulsi kapal tidak dapat hanya dengan meninjau secara terpisah aspek-aspek badan kapal, baling-baling dan penggerak utama lainya, tetapi secara keseluruhan harus diperhatikan secara utuh untuk mendapatkan kesesuaian (matching point). Perubahan karakteristik dari ketiga aspek tersebut perlu diikuti dengan penyesuaian kembali (re-matching) karena pada kenyataannya sistem propulsi kapal bukanlah sesuatu yang bersifat deterministik yang dapat diterapkan pada seluruh kapal (Muhammad, 2001) (Hermanto. 2017)
7
2.5. Jenis – Jenis Sistem Propulsi Kapal
Berikut beberapa jenis sistem propulsi yang biasa digunakan dalam dunia perkapalan:
a. Diesel Propulsion System
Digunakan pada hampir semua jenis kapal, baik kapal kecil maupun kapal sedang. Sistem ini dapat mengubah energi mekanik ke energi termal.
b. Wind Propulsion
Biasa digunakan pada kapal-kapal kecil. Jenis propulsi ini masih belum banyak digunakan pada kapal-kapal besar. Sistem ini muncul karena sebagai alternatif untuk sistem propulsi lain yang sebagian besar menghasilkan gas CO2.
c. Nuclear Powered Ship Propulsion System
Digunakan pada kapal-kapal maritim. Sistem ini memanfaatkan reaksi fisi nuklir, dimana dari reaksi ini, dihasilkan sejumlah daya elektrik.
d. Gas tubine propulsion
Sistemini digunakan oleh sejumlah besar angkatan laut, karena sistem ini dapat menghasilkan kecepatan yang luar biasa.
e. Fuel cell propulsion system
Dianggap sebagai alternatif kelautan karena sistem ini bersih. sistem ini menggunakan hidrogen sebagai bahan bakar dan listrik dibuat tanpa pembakaran apapun.
f. Biodiesel Fuel Propulsion
Menggunakan tenaga biodiesel, sistem ini telah dianggap sebagai sistem yang potensial dan masih banyak dilakukan riset terhadap sistem propulsi ini.
g. Steam Turbine Propulsion
Digunakan pada abad 19-an dan awal abad 20-an. Sistem propulsi ini memanfaatkan uap, dimana bahan bakarnya merupakan batubara.
h. Diesel Electric Propulsion
Telah digunakan sejak tahun 1900-an. Sistem ini menggunakan kombinasi dari generatoryangdioperasikanolehmotor listrik.
i. Water Jet Propulsion
Digunakansejak tahun 1954. Keuntungan dari sistem ini adalah dengan rendahnyatingkatpolusi suara dan memiliki kecepatan yang tinggi.
8
j. Gas Fuel or Tri Fuel Propulsion
Sistemini memanfaatkan LNG bahan bakar dan setelah dimodifikasi, system inisekarang dapat mengurangi emisi pada kapal.
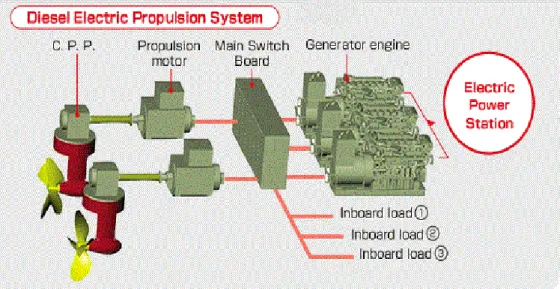
2.6. Propulsi Elektrik
Sistem propulsi elektrik adalah sistem pada kapal yang menggunakan generator set sebagai mesin penggerak menggantikan posisi atau kinerja dari mesin utama, dimana dalam hal ini generator dihubungkan ke switchboar,dan selanjutnya energi atau aliran listrik diteruskan ke transformer, kemudian dikonversi dengan menggunakan konventer ke motor elektrik yang menggerakkan baling-baling kapal.
Pada mulanya electric-propulsion merupakan sebuah alternatif penggerak utama kapal yang sangat mahal dan kurang effisien. Hal ini terutama disebabkan oleh penggunaan konstruksi motor DC yang besar dan berat. Kapal harus memiliki dua sistem elektrik yang terpisah, satu untuk melayani penggerak utama dan satunya untuk melayani permesinan bantu. Berkaitan dengan perkembangan yang pesatdari penerapan teknologi elektronika dan komputer, penerapan dari sistem DC ke sistem AC, perkembangan kehandalan mesin, ‘marinisasi’ system elektronika, dan yang terpenting adalah perkembangan Thyristor-converter, sehingga sekarang ini memungkinkan untuk memperlengkapi sebuah kapal dengan sistem elektrik dengan kapasitas tenaga yang tak terbatas berdasarkan konsep Power-station.
Sistem propulsi motor listrik sendiri mempunyai banyak keuntungan utama dibandingkan sistem propulsi lain. Keuntungan sistem ini adalah investasi awal yang tidak terlalu besar, menghemat tempat, lebih ringan dan sedikit kehilangan power pada sistem transmisi dibandingkan dengan sistem propulsi tipe lain. Hubungan elektrik antara generator dan motor propulsi lebih leluasa dalam penempatan peralatan dalam ruangan jika dibandingkan dengan sistem propulsi yang lain. Selain itu dapat menggunakan berbagai penggerak utama seperti diesel, turbin gas, turbin uap, dan hasil keluarannya dapat lebih mudah digabung dibandingkan dengan sistem mekanik. Untuk tipe penggerak mula tidak langsung, penggerak elektrik mempunyai keuntungan dapat membalikkan putaran propeller dengan relatif lebih mudah kontrolnya. Dalam beberapa kasus yang masih dalam tahap pengembangan, power yang dibutuhkan oleh propeller
9
dengan menggunakan beberapa penggerak mula dengan tipe medium dan high speed, sistem penggerak elektrik mampu memecahkan persoalan ini tanpa menggunakan kopling mekanik.
Adapun kelemahan dari sistem propulsi elektrik yaitu dalam hal suara atau kebisingan kapal, memang tidak adanya ledakan atau pembakaran di dalam motor listrik, maka motor sistim propulsi tidak terlalu mengganggu dalam hal suara. Namun untuk propeler-propeler tertentu yang diputar dengan kecepatan dan rpm yang cukup tinggi , maka faktor suara tetap akan timbul akibat kecepatan putar daripada propeller atau baling-baling menghisap dan mendorong udara.
Selain itu, sistem propulsi elektrik efisien hanya pada daya maksimum, jika dibandingkan dengan mesin diesel. Membutuhkan perawatan yang ekstra , lebih besar dan lebih mahal, tidak cocok untuk aplikasi kecepatan tinggi dan tidak cocok untuk aplikasi berdaya besar.
2.7. Motor DC dan AC sebagai Penggerak Kapal
Penggunaan motor arus searah sebagai pengganti mesin penggerak utama adalah dirasa baik dan menguntungkan. Motor arus searah banyak memiliki beberapa kelebihan antara lain; efisiensi tinggi, kemampuan beban lebih, tahan terhadap getaran atau guncangan, memiliki umur yang panjang, dan system pengaturan yang lebih mudah dibandingkan dengan motor arus bolak-balik sehingga suatu hal yang wajar jika motor arus searah sering digunakan. Motor arus searah bekerja pada kecepatan yang relative kontan, untuk kecepatan berubah-ubah motor DC lebih banyak dipakai namun dengan berkembangnya teknologi semikonduktor dan bidang elektronika daya, pengaturan kecepatan motor DC akan sangat lebih mudah lagi dalam hal pengaturan dan efisiensi yang lebih tinggi dikarenakan pengurangan pemborosan daya lebih kecil dan pengaturan yang lebih halus.
Motor listrik DC yang digunakan sebagai tenaga penggerak utama, biasanya digunakan pada kapal-kapal dengan kemampuan manuver yang tinggi, kapal khusus, kapal dengan daya tampung muatan yang besar, dan kapal yang menggunakan penggerak mula non-reversible. Perkembangan prime mover untuk penggerak utama di kapal mengalami perkembangan yang sangat pesat sejak ditemukannya uap oleh J.
10
Watt, mesin diesel oleh Rudolf Diesel serta turbin gas oleh Brayton. Pada tahun-tahun awal berbagai penemuan mengenai ketiga prime mover hanya berkisar pada penyempurnaan sistem kerja. Dan pada dewasa ini berbagai perkembangan menjurus pada penggunaan emisi gas buang. Pada mesin diesel pengaturan putaran dan pembalikan putaran sangat dimungkinkan. Tetapi pada proses pembalikan putaran pada mesin diesel membutuhkan waktu yang relatif lebih lama jika ditinjau mulai dari putaran normal. Untuk turbin uap dan turbin gas pengaturan putaran mempunyai range yang sangat sempit dari putaran normal. Dan untuk membalikkan putaran pada kedua jenis prime mover tersebut sangatlah tidak mungkin.
Berdasarkan pada fakta diatas maka para engineer mengembangkan sistem yang merupakan gabungan dari ketiga prime mover tersebut dengan motor listrik yang selanjutnya disebut dengan Electric Propulsion. Pada sistem electric propulsion, ketiga prime mover menggerakkan generator dan selanjutnya generator mensuplai listrik yang digunakan untuk memutar motor listrik. Jenis motor listrik yang digunakan disesuaikan dengan type atau fungsi kapal tersebut dalam eksplotasinya. Pada umumnya kapal yang mempunyai kegunaan khusus yang menggunakan motor DC dan untuk kapal niaga yang berorientasi profit pada umumnya menggunakan motor AC. Misalnya untuk kapal pemecah es (ice breaker) menggunakan motor DC dalam hal ini dikarenakan torsi yang diperlukan propeller sangat besar.
11
Gambar 2.8: skema system propulsi DEP
2.7.1 Distribusi power
Pada kapal yang menggunakan sistem Diesel electric power station, tenaga bantu dan pelayanan kapal adalah secara elektris, karenanya jika system propulsi utama juga menggunakan system elektris maka Semua kebutuhan tenaga di kapal tersebut akan dapat dihasilkan oleh mesin yang sama. Dengan menggunakan beberapa buah Gen-set maka akan memungkinkan untuk menyediakan tenaga listrik secara kontinyu dan teratur. Hal ini juga didukung dengan penggunaan system control produksi listrik untuk mengoptimisasi output dari masing-masing generator listrik.
2.7.2 Karakteristik Motor Listrik DC
Sistem pembangkit listrik DC biasanya terdiri dari beberapa generator putaran tinggi atau menengah yang dirangkai secara paralel. Pemilihan ukuran mesin berdasarkan pada tingkat operasi yang memungkinkan beberapa unit beroperasi tidak melebihi dari total daya yang dihasilkan. Untuk memperoleh daya yang optimal, generator biasanya dipilih generator pada dua putaran yang berbeda. Arus listrik yang dihasilkan generator dihubungkan dengan terminal utama melalui rangkaian penghubung. Rangkaian penghubung ini dimaksudkan untuk menghubungkan dan memutuskaan arus pada saat terjadi over load dan hubungan singkat. Sering kali sebuah
12
sistem terminal rangkaian dibuat untuk memenuhi kebutuhan daya pada kapal yang diambil pada terminal yang sama melalui transformer atau motor generator. Karena unggul dalam ukuran, berat dan biaya, generator set 600 Volt lebih disenangi untuk sistem yang berukuran kecil dan sedang. Tetapi ketika generator rating melebihi 3300 kVA, seperti yang terjadi pada medium speed engine beban penuh atau dapat diatasi oleh 600 Volt circuit breakers. Pada kasus tegangan tinggi (4160 V) semua sistem menggunakan transformer untuk menurunkan tegangan, biasanya hingga 600 V untuk mesin penggerak 500 Hp. Untuk motor 1000 Hp, jenis konverter yang sering digunakan adalah konverter 6 pulsa.
Untuk membalik arah putaran motor DC yang biasanya dilakukan pada propeller jenis Fixed Pitch, ada dua pendekatan yang mungkin digunakan. Pertama adalah membalik arah aliran arus pada medan motor. Metode yang kedua adalah merubah arah arus jangkarnya. Sistem penggerak elektrik DC sering kali dilengkapi dengan pengatur medan shunt yang menjaga motor beroperasi pada daya konstan. Secara mekanik digambarkan sebagai pengaturan ratio reduction gear sehingga memungkinkan mesin utama beroperasi dengan kecepatan putaran propeller yang berubah-ubah. Pada kapal-kapal besar daya torsi diperkirakan 70 % dari rpm putaran propeller.
Sistem DC telah digunakan secara luas pada instalasi. Kebanyakan sistem DC dipakai pada beberapa mesin diesel kecepatan tinggi bersama dengan generator AC yang dihubungkan ke terminal daya konverter statis dimana AC diubah menjadi DC dan menghasilkan daya untuk menjalankan motor DC guna memutar shaft propeller. Motor listrik dibuat dengan satu atau dua dinamo pada shaft, umumnya ditahan oleh dua bantalan. Didasarkan pada standar biaya yang minimum dan berat yang ringan, motor dengan satu dinamo lebih disukai. Perencanaan lain yang mungkin digunakan akibat terbatasnya ruangan dan berat pada sebuah motor kecepatan tinggi adalah menghubungkan shaft propeller dengan reduction gear. Motor DC yang menggunakan reduction gear sering kali dilengkapi sistem pelumasan gemuk untuk menghindari pergeseran bantalan.
Pada pemakaian motor propulsi berukuran kecil selalu dilengkapi dengan thrust bearing yang dipasang pada bagian belakang motor tersebut. Bila motor memakai gear,
13
thrust bearing biasa dipasang pada reduction gear. Untuk motor DC berukuran besar, thrust bearing dipasang pada bagian depan terpisah dari motor. Thrust bearing dan motor bearing memiliki minyak pelumas yang termasuk dalam sistem pelumasan.
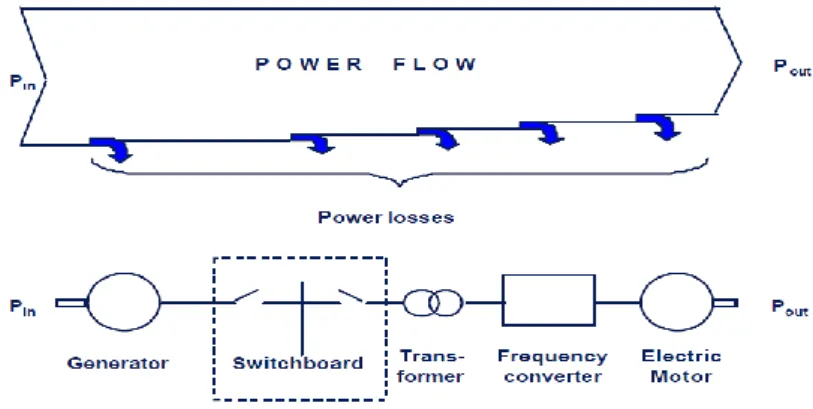
2.8. Skema atau gambar diagram sistem propulsi elektrik
Kebanyakan system penggerak tertutup, jumlah tenaga yang dihasilkan harus sesuai dengan jumlah tenaga yang dikeluarkan termasuk daya yang hilang. Sedangkan pada penggerak system elektrik skema atau sistemnya terdiri dari generator, distribusi system, termasuk distribusi transformer dan pengatur kecepatan, alur dayanya dapat dilihat pada gambar berikut.
Gambar 2.9: power flow pada system propulsi elektrik
Secara spesifik dari gambar 3 diatas, sistem dari propulsi elektrik terdiri dari komponen berikut:
a. Generator set
b. Saklar/ Switchboard
c. Power transformer
d. Motor drive (frequency converter)
e. Motor (synchronous/inductive)
f. Poros & propeller
14
Sehingga Efisiensi dari system elektrik pada gambar diatas adalah sebagaiberikut:
Pada tiap-tiap komponen, efisiensi elektrik dapat diperhitungkan dan nilai pada generator yaitu Ƞ = 0.999, pada transformer yaitu Ƞ = 0,99-0,995, frekuensi converter yaitu Ƞ = 0.98-0,99, dan pada motor listrik yaitu: Ƞ = 0,95-0,97. Untuk itu efisiensi diesel electric system jika dihitung dari poros mesin diesel hingga ke poros motor listrik adalah berkisar antara 0.88 dan 0.92 pada saat full load. Efisiensi juga tergantung pada system pembebanan.
2.9. Keuntungan dan Kerugian Electric Propulsion
Pemilihan sistem propulsi adalah salah satu pertimbangan dasar dalam merancang sebuah kapal. Tetapi hal ini dapat menjadi sangat sulit untuk memuaskan dan mencapai semua kebutuhan secara simultan. Bagaimanapun harus dibuat sebuah design dari sistem yang paling optimal yang memiliki sebanyak mungkin faktor-faktor yang menguntungkan.
1. Distribusi power
Pada kapal yang menggunakan sistem electric power station, tenaga bantu dan pelayanan kapal adalah secara elektris, karenanya jika sistem propulsi utama juga menggunakan sistem elektris maka semua kebutuhan tenaga di kapal tersebut akan dapat dihasilkan oleh mesin yang sama. Dengan menggunakan beberapa buah Gen-set maka akan memungkinkan untuk menyediakan tenaga listrik secara kontinyu dan teratur. Hal ini juga didukung dengan penggunaan sistem kontrol produksi listrik untuk mengoptimisasi output dari masing-masing generator listrik. Ada beberapa aspek yang berkaitan dengan distribusi power pada sistem ini, yaitu :
2. Performance total dan effisiensi
Secara praktis untuk meningkatkan effisiens total dari instalasi adalah dengan menggunakar motor listrik yang paling effisien. Berikut adalal effisiensi dari beberapa permesinan :
• Alternator (qA ) 95% - 97%
• Synchronous motor (TgMS) 95% - 97% • Asynchronous motor (qMA) 94% - 96% • DC motor (TIMDC) 94% - 96%
15
• Reduction gear ( TlR) ≈ 97% DC converter (qCC) > 98.5% 3. Variasi tenaga
Pengadaan tenaga listrik dilakukan secara bersama oleh beberapa buah gen-set karenanya variasi tenaga bisa dilakukan lebih cepat. Hal ini sangat berguna untuk kapal-kapal yang memerlukan manuver tinggi, misal Tug boat atau kapal tunda. Dengan demikian untuk kapal yang mempunyai profil operasional tertentu, operator dapat memilih kombinasi engine yang paling sesuai dalam kaitannya untuk menjamin agar kapal dapat berjalan pada effisiensi yang paling optimal.
4. Penyediaan tenaga
Pada elektrik propulsi dengan sebuah sistem yang terdiri dari beberapa unit gen-set, terjadinya insiden kerusakan sebuah set dapat diatasi dengan mengoperasikan gen-set lain (secara otomatis ataupun manual start-up), sehingga tidak akan mempengaruhi operasional kapal.
5. Reliability dan redundancy
Propulsi elektrik memiliki redundancy yang berlipal ganda dalam memproduksi tenaga. Jika terjad kerusakan sebuah motor-induk atau lebih, mash ada cukup tenaga yang tersedia untuk meng operasikan kapal secara aman dibawah kondisi tertentu. Sejumlah motor diesel sebagai mesir bantu adalah bertipe sama sehingga masing-masing dapat diatur pada tingkat operasional yank serendah mungkin. Dengan demikian dapat meningkatkan reliability dari power plant tersebut.
6. Fleksibilitas perancangan kamar mesin
Pada kapal dengan sistem propulsi mekanis, tempat peletakan mesin utama menjadi sangat terbatas karena kamar mesin juga relatif terbatas. Propulsi elektrik memungkinkan untuk memisahkan motor propulsi dengan penggerak utamanya. Hal ini dalam banyak hal sangr menguntungkan bagi perancang kapal dan pemilik kapal. Sebuah feasibility study yang dilakukan oleh Deltamarin Ltd. pada sebuah kapal penumpang menunjukkan bahwa fleksibilitas dari sebuah propulsi elektrik dapat menjadi jauh lebih baik dengan meletakkan diesel gen-set jauh di bagian belakang dari bulkhead deck. Pemisahan penuh antara ruang penumpang dan ruang untuk permesinan juga memberikan aspek baru yang sangat menguntungkan terhadap perancangan dan konstruk dari kapal.
7. Aspek dimensi, berat, dan ruang
Konstruksi dari permesinan listrik adalah relatif berat dan besar. Misal motor DC yang dua kali lebih berat dari motor AC. Secara individu mesin listrik nampak sangat berat dan besar, namun jika dilihat dari keseluruhan sistem, propulsi elektrik lebih
16
menghemat ukuran, ruang, dan berat dibanding sistem propulsi mekanis. Hal ini terutama disebabkan oleh fleksibilitas penempatan di kamar mesin
8. Fuel Consumption
Pada kapal-kapal sekarang ini yang beroperasi dengan tingkat pelayanan operasi yang sangat ber variasi membuat elektrik propulsi menjadi lebih menguntungkan dari segi effisiensi pemakaian fuel. Pembebanan yang tinggi dan uniform dari Electric propulsion mengakibatkan sistem ini memberikan kemampuan yang lebih baik untuk Heat recovery, untuk lebih memaksimalkan penggunaan fuel.
9. Aspek Lingkungan
Dengan semakin meningkatnya standard kebutuhan kenyamanan penumpang dan ABK maka perlu upaya untuk mengurangi noise dan vibrasi di kapal. Propulsi elektrik memberikan tingkat kebisingan dan getaran yang rendah, karena tanpa adanya reduction gear dan penempatan dari permesinan yang baik. Propulsi elektrik juga memberikan dampak polusi yang lebih rendah. Dimana motor diesel bekerja pada effisiensi optimumnya dengan kecepatan konstan sehingga memberikan performance yang baik terhadap Exhaust gas emmision. Satu hal lagi yang perlu dipertimbangkan di dalam menentukan pemilihan Propulsi elektrik adalah Electromagnetic Interference (EMI). EMI dapat mempengaruhi akurasi dari perlengkapan elektronik
17
BAB III
METODOLOGI
Metodologimerupakan langkah -langkah pengerjaan tugas akhir secara sistematis yang dilakukan sejak dimulainya pengerjaan hingga akhir dari proses penelitian. Metodologi penelitian diperlukan agar proses penelitian dapat berjalan sesuai dengan harapan dan memperoleh hasil yang maksimal.
Pada tugas akhir ini digunakan metode dengan melakukan praktikum untuk pengambilan data yang dilanjutkan dengan melakukan perhitungan – perhitungan yang dibutuhkan dalam melakukan analisa pengaruh variasi ukuran sel terhadap output listrik yang dihasilkan dari aluminium sebagai anoda.
3.1. Studi Literatur
Sebelum memulai pengerjaan Tugas Akhir (TA) dilakukan study literature dengan mencari literature-literatur mengenai system propulsi elektrik dimana berupa jurnal,paper, hasil penelitian, buku-buku baik versi cetak maupun versi online. Pada tahap ini merumuskan segala sesuatu yang akan dilakukan pada Tugas Akhir ini sesuai dengan referensi-referensi yang dimiliki.
3.2 Survey Lapangan
Meninjau langsung ke lapangan untung memperoleh data pengukuran serta data penunjang yang diperlukan
3.3Pengumpulan data
Melakukan pengambilan data dan pencatatan data yang merupakan hasil analisis dan penarikan kesimpulan permasalahan ini. Pengumpulan data melingkupi data kapal yang akan di analisis seperti kapal KRI Dewa Kembar dan KM. Tarik.
3.4Perhitungan Tahanan Kapal
Perhitungan tahanan kapal ini adalah awal untuk menentukan performa kecepatan kapal yang dibutuhkan oleh kapal untuk dapat beroperasi sesuai dengan fungsi kapal. Metode perhitungan tahanan kapal menggunakan metode Harvald.
Komponen Tahanan Kapal
Komponen tahanan yang diuraikan [Sy. Aa. Harvald, 1983] sebagai berikut : 1. Tahanan Gesek, Rf
Tahanan gesek adalah komponen tahanan yang diperoleh dengan mengintegralkan tegangan tangsial keseluruh permukaan basah kapal menurut arah gerak kapal.
18
2. Tahanan Sisa, Rr
Tahanan sisa adalah kuantitas yang merupakan hasil pengurangan dari tahanan total badan kapal terhadap tahanan gesek, yang merupakan hasil perhitungan yang diperoleh dengan memakai rumus khusus. Secara umum bagian yang terbesar dari tahanan sisa pada kapal adalah tahanan gelombang (wave making resistance)
3. Tahanan Viskos, Rv
Tahanan viskos adalah komponen tahanan yang terkait dengan energi yang dikeluarkan akibat pengaruh viskositas.
4. Tahanan Tekanan, Rp
Tahanan tekanan adalah komponen tahanan yang diperoleh dengan jalan mengintegrasikan tegangan normal ke seluruh permukaan benda menurut arah gerak benda.
5. Tahanan Tekanan Viskos, Rpv
Tahanan tekanan viskos adalah komponen tahanan yang diperoleh dengan cara mengintegrasikan komponen tegangan normal akibat viskositas dan turbulensi. Kuantitas ini tidak dapat langsung diukur, kecuali untuk benda yang terbenam seluruhnya yang dalam hal ini sama dengan tahanan tekanan.
6. Tahanan Gelombang, Rwp
Tahanan gelombang adalah komponen tahanan yang disimpulkan dari hasil pengukuran elevansi gelombang yang jauh dari kapal dan model; dakam hal ini medan kecepatan bawah permukaan(subsurface velocity field), yang berarti momentum fluida, dianggap dapat dikaitkan dengan pola gelombang dengan memakai teori yang disebut teori linier. Tahanan yang disimpulkan tersebut tidak termasuk tahanan pemecah gelombang (wave making resistance).
7. Tahanan Pemecah Gelombang, Rwb
Tahanan pemecah gelombang adalah komponen tahanan terkait dengan pemecah (gelombang yang ada diburitan kapal).
8. Tahanan Semprotan, Rs
Tahanan semprotan adalah komponen tahanan yang terkait dengan energi yang dikeluarkan untuk menimbulkan semprotan.
Sebagai tahanan tambahan : a. Tahanan Udara
Tahanan ini dialami oleh bagian dari badna utama kapal yang berada diatas permukaan air dan bangunan atas (superstructure) karena gerakan kapal yang juga menyusuri udara.
b. Tahanan Kemudi
Untuk mempertahankan keseluruhan lintasan, koreksi kedudukan umumnya dilakukan dengan memakai daun kemudi. Pemakaian daun
19
kemudi menyebabkan timbulnya komponen tambahan yang disebut tahanan kemudi.
c. Tahanan Kekasaran
Tahanan akibat kekasaran, misalnya akibat korosi dan fouling (pengotoran) pada badan kapal.
Tahanan total berbanding lurus dengan koefisien tahanan total yang secara matematis didefinisikan dengan persamaan sebagai berikut :
RT = ½ x p x Ct x Vs2 x S
Dimana : Ct = Koefisien tahanan total Vs = Kecepatan dinas kapal (m/s) S = Luas permukaan basah (m2)
Untuk sebagian kapal yang berbeda diatas permukaan air, maka tahanan yang disebabkan oleh udara Ra, sebagai komponen tahanan tambahan dapat juga diperhitungkan.
(dikutip dari Tesis Antoni Simanjuntak, Analisa Karakteristik Propulsi Listrik berpenggerak Motor Listrik DC)
3.5 Perhitungan Daya Main Engine
Setelah diketahui besar tahanan kapal, langkah berikutnya adalah menentukan daya main engine yang dihasilkan oleh main engine untuk menggerakan kapal dengan menghitung seperti langkah-langkah sebagai berikut: a. Perhitungan Daya Efektif Kapal (EHP)
Daya efektif kapal (EHP) adalah besarnya daya yang dibutuhkan untuk mengatasi tahanan kapal dari badan kapal, agar kapal dapat bergerak dari suati tempat ke tempat lain dengan kecepatan sebesar Vs, dan merupakan perkalian antara RT (Tahanan Total) dan Vs (kecepatan dinas). Sedangkan daya penggerak motor utama yang dibutuhkan merupakan Service Continous Rating (SCR) yang besarnya sekitar 80% dari daya rem.
b. Perhitungan Daya Pada Tabung Poros Baling-Baling (DHP)
Daya Pada Tabung Poros Baling-Baling (DHP) adalah daya yang di serap oleh baling – baling kapal guna menghasilkan Daya Dorong, atau dengan kata lain DHP merupakan daya yang di salurkan oleh motor penggerak ke baling – baling kapal (propeller) yang kemudian dirubahnya menjadi gaya dorong kapal. Daya pada tabung poros baling - baling dihitung dari perbandingan antara Daya Efektif atau EHP dengan Koefisien Propulsif atau PC.
20
c. Perhitungan Daya Pada Poros Baling-Baling (SHP)
Shaft Horse Power (SHP) adalah daya yang terukur hingga daerah di depan bantalan tabung poros (stern tube) dari sistem perporosan penggerak kapal.
3.6 Perhitungan Torsi pada Motor Listrik
Perhitungan torsi ini adalah untuk mengetahui daya putar yang dihasilkan motor listrik untuk menggerakan propeller dalam satuan waktu.
3.7Penarikan Kesimpulan
Pada tahap akhir adalan dilakukan penarikan kesimpulan. Dalam tahap ini akan mengetahui bagaimana dari hasil alat yang direncanakan apakah sudah sesuai target atau tidak.
21
No
No
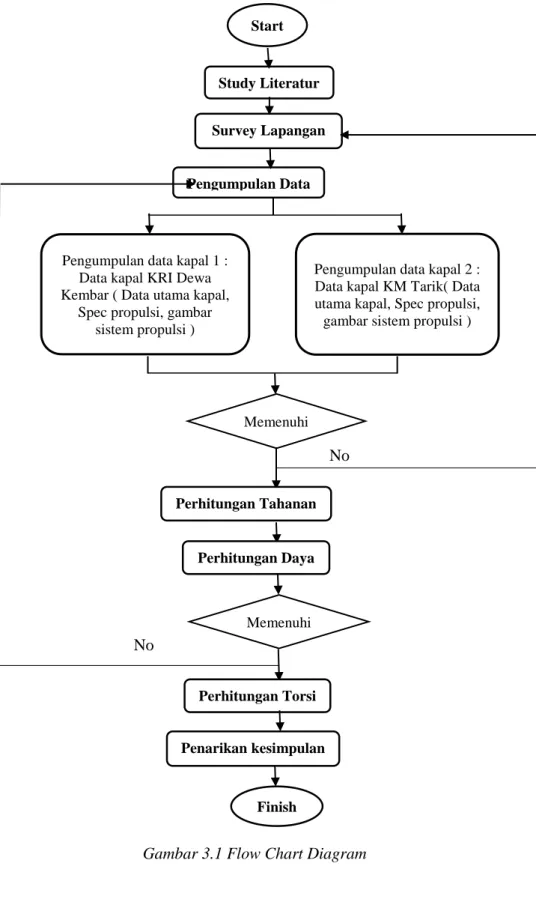
Gambar 3.1 Flow Chart Diagram
Study Literatur
Survey Lapangan Start
Pengumpulan Data
Pengumpulan data kapal 1 : Data kapal KRI Dewa Kembar ( Data utama kapal,
Spec propulsi, gambar sistem propulsi )
Pengumpulan data kapal 2 : Data kapal KM Tarik( Data utama kapal, Spec propulsi, gambar sistem propulsi )
Memenuhi Perhitungan Tahanan Perhitungan Daya Memenuhi Perhitungan Torsi Penarikan kesimpulan Finish
22
BAB IV
ANALISA DATA DAN PEMBAHASAN
4.1 Data Kapal Berpenggerak Propulsi Elektrik
Berikut ini adalah beberapa data utama kapal dan system penggeraknya yang telah dikumpulkan oleh penulis selama melakukan penelitian dan pengamatan untuk mendukung proses analisa permasalahan dalam pengerjaan Tugas Akhir ini :
Ukuran Utama Kapal
a. Panjang Garis Bawah Air (LWL) : 75,270 m b. Panjang Antar Garis Tegak (LPP) : 72,736 m c. Lebar (B) : 15,240 m
d. Tinggi (H) : 8,230 m e. Sarat (T) : 4,880 m
f. Kecepatan Dinas (Vs) : 8 Knot
g. Kapasitas Bahan Bakar Maksimum : 554.831 Liter Data Teknis Motor Listrik DC Pendorong Pokok
a. Jumlah : 2 Unit Elektro Motor b. Nomor Seri : HJ 200911 c. Type : AEI
d. Negara Pembuat : Inggris e. Tenaga (Power) : 2 x 1000 HP f. Voltage : 670 V DC
g. Ampere : 1200 A
h. Putaran Maksimum : 1900nrpm Data Teknis Diesel Generator Lama a. Jumlah : 3 Unit
b. Type/Merk : 12 YJCZ/PAXMAN c. Model : V Ventura
d. Nomer Seri : 610019/1,630036/1,650017/I e. Negara Pembuat : Inggris
f. Putaran Mesin ; 1250 rpm g. Tenaga (Power) :1.190 BHP
h. Pemakaian Bahan Bakar : 202 Liter/Jam Data Teknis Generator Pokok
a. Jumlah : 3 Unit
b. Type/Merk : ORC 26/22 c. Nomor Seri : HJ 200911 d. Model : Shund Compound e. Negara Pembuat : Inggris f. Putaran : 1250 rpm
24
g. Daya Power Output : 610 KW h. Voltage : 510 V DC
4.2 Perhitungan Tahanan Kapal Berpenggerak Propulsi Elektrik
Untuk pehitungan tahanan kapal digunakan data-data utama kapal dengan menggunakan metode harvald, rumus dan table-tabel.
• Volume Displasement ( ) = LWL x B x T x Cb
= 75,27 x 15,24 x 4,88 x 0,64 = 3582,67 ton
• Berat Displasement
Δ = x p (massa jenis air laut 1,025 ton/m3) = 3582,67 x 1,025
= 3672,23 ton
• Luas Permukaan Basah (S) S = ρ x LPP (CbxB + 1,7T) = 1,025 x 72,736 x (0,64 x 15,24 + 1,7 x 4,88) =1413,509 m2 • Angka Froude (Fn) Fn = Vs / (g x L)0,5 = 6,944 / (9,8 x 72,736)0,5 = 0,256 • Angka Reynold ( Rn) Rn = Vs x L / v (viskositas kinematic) = 6,944 x 72,736 / 0,0000009425200 =554582383
• Perhitungan Tahanan Gesek (Cf) Cf = 0,075 / (log Rn-2)2
= 0,00165
• Perhitungan Tahanan Sisa (Cr) Cr = LWL / 1/3 = 75,27 / 3582,67 = 4,723 β = (0,08 x Cb) + 0,93 = (0,08 x 0,64) + 0,93 = 0,981
Sehingga didapat koefisien prismatic (φ) φ = Cb /β
= 0,64 / 0,981 = 0,652
Tabel dan Grafik interporasi
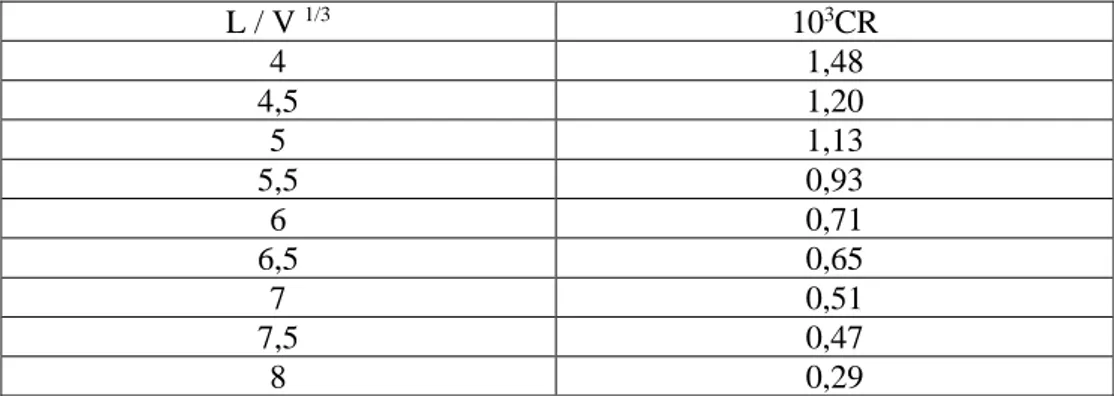
L / V 1/3 103CR 4 1,48 4,5 1,20 5 1,13 5,5 0,93 6 0,71 6,5 0,65 7 0,51 7,5 0,47 8 0,29 Tabel 4.1 Interpolasi Grafik 4.1 interporasi Sehingga didapat nilai Cr = (-0,2823x + 2,5129) / 1000
= (-0,2823 x 4,723 + 2,5129) / 1000 = 0,00119 10 3Cr L/V 1/3
10
3Cr vs L / V
1/3 y = -0,2823x + 2,512926
• Perhitungan Tahanan Tambahan (Ca) Tabel interporasi tahanan tambahan
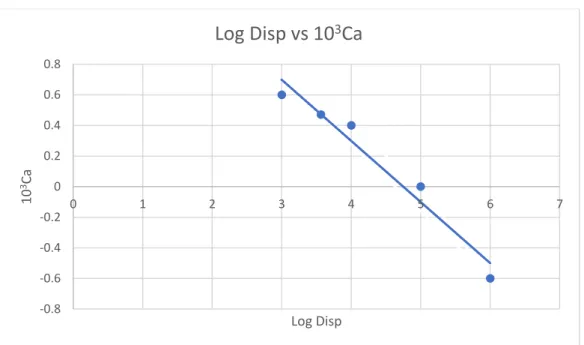
Disp. Log Disp 103 Ca
1000 3 0,6
10000 4 0,4
100000 5 0
1000000 6 -0,6
3672 3,565 0,47
Tabel 4.2 Interporasi Tahanan Tambahan Grafik interporasi tahanan tambahan
Grafik 4.2 interporasi Tahanan Tambahan Sehingga didapat nilai Ca = (-0,4 x Log Disp + 1,9) / 1000
= (-0,4 x 3,564 + 1,9) / 1000 = 0,00047403 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 0 1 2 3 4 5 6 7 10 3Ca Log Disp
Log Disp vs 10
3Ca
• Perhitungan Tahanan Kemudi ( Cas ) 103 Cas = 0,04
Cas = 0,00004
• Perhitungan Tahanan Udara ( Caa)
Ca = 90% dari tekanan dinamis air laut dengan kecepatan 13,5 knot • Perhitungan Tahanan Total
Tahanan total adalah jumlah total tahanan yang terjadi di kapal maupun dari luar kapal yang menghambat sebuah gaya dorong dari kapal tersebut.
Ct water = Cf + Cr + Ca + Cas
= 0,00165 + 0,00119 + 0,000474 + 0,00004 = 0,00336
Jadi tahanan total kapal
Rt water = Ctwater x 0,5 x p x Vs2 x S = 0,00336 x 0,5 x 1,025 x (6,944)2 x 1413,509 = 117,382 KN Rt Udara = Ctudara x 0,5 x p x Vs2 x A = 0,9 x 0,5 x 0,0012 x (6,944)2 x 259,7 = 6,086 KN
Sehingga didapat tahanan total RT = 117,382+6,086 = 123,47 KN
Dan untuk tahanan servis RT Servis = (1+15%) x 123,467 = 141,986 KN 4.3 Perhitungan Daya yang dibutuhkan Kapal
Pada umumnya kapal yang bergerak di media air dengan kecepatan tertentu akan mengalami gaya hambat (Tahanan ) yang berlawanan dengan arah gerak kapal. Untuk dapat bergerak maka kapal harus memiliki daya yang lebih besar dari besarnya gaya hambat. Gaya dorong kapal (thrust) adalah gaya dorong kaoal yang dihasilkan dari kerja alat gerak kapal (propulsor). Dan daya yang disalurkan dari engine ke alat gerak kapal disebut (DHP) yang berasal dari daya prors (SHP).
• EHP (Efektif Horse Power)
Besarnya daya yang dibutuhkan untuk mengatasi gaya hambatan kapal. EHP = Vs x RT
= 6,944 x 141,986 = 985,957 Kw = 1322,17 HP
28
• DHP (Delivery Horse Power)
Besarnya daya yang disalurkan oleh motor penggerak kapal ke baling-baling kapal yang kemudian dirubah menjadi daya dorong kapal.
DHP = EHP / Pc
Pc (Koefisien Propulsi) = ɳrr x ɳH x ɳp a. ɳH (Koefisien Lambung)
ɳH = (1-t) / (1-w)
w = perbandingan kecepatan kapal dengan air menuju propeller t = Thrust deduction factor
t = k x w = 0,7 x 0,32925 = 0,23 Sehingga ɳH = (1 – t) / (1 – w) = (1 – 0,23) / (1 – 0,32925) = 1,143 b. ɳrr (Efisisensi Propeller)
propeller single creq 1,0 -1,1 di ambil 1,03 c. ɳP (Efisiensi Open Water)
Adalah efisiensi yang didapatkan ketika dilakukannya tes open water. Nilai 40 – 70% di ambil 70% = 0,7
Sehingga PC = ɳrr x ɳH x ɳp = 1,03 x 1,143 x 0,7
= 0,824
Dan DHP didapat = EHP / PC = 1322,169 / 0,824
1604,574 HP
• SHP ( Shaft Horse Power)
Daya yang terukur hingga daerah di depan bantalan tabung poros (stern tube) dari system perporosan penggerak kapal.
SHP = DHP / ɳS = 1604,574 / 0,98 = 1637,320 HP
Besar daya main engine adalah daya keluaran pada pelayaran normal atau Service Continous Rating (SCR), dimana besarnya adalah 85% dari daya keluaran pada kondisi maksimum Continous Rating (MCR) dari main engine adalah
SHP mcr = SHP scr / 0,85 = 1637,574 / 0,85
4.3.1 Perhitungan Performa Daya pada Variasi Kecepatan 8 knot
Ditahap ini, akan menganalisis variasi kecepatan sebersar 8 knot dari dari yang seharusnya kecepatan dinasnya sebesar 13,5 knot. Hal ini dilakukan agar memperoleh variable data yang sama untuk kebutuhan perbandingan data. Perhitungan ini menggunakan effisiensi performa motor listrik 0,9 karena motor ini masih dalam kinerja yang maksimal dan untuk generator menggunakan effisiensi 0,8.
Daya Motor Listrik
Power yang dibutuhkan kapal untuk menghasilkan 8 knot adalah 507,196kW atau 680,150 HP.
Karena motor listrik masih dapat dikatakan 100% dapat menghasilkan daya 2000 HP, sehingga disimpulkan, bahwa daya listrik lebih besar dari daya yang dibutuhkan kapal untuk mencapai 8 knot
Daya Motor > SHP
Jadi motor listrik dapat memenuhi kebutuhan daya untuk 8 knot. Daya Generator
Daya Generator yang dibutuhkan oleh motor listrik adalah
𝑃g = 𝑃𝑜𝑤𝑒𝑟 ɳ motor listrik = 680,150 HP / 0,9 = 755,722 HP
Jadi diketahui daya generator yang dibutuhkan adalah 755,722 HP
Karena generator yang dimiliki berjumlah 3 dan masing-masing memiliki daya sebesar 817,69 HP. Untuk 3 generator menghasilkan daya 2453,08 HP
Daya Generator > Daya yang dibutuhkan
Sehingga generator mampu menghasilkan daya untuk kecepatan 8 knot. Daya Diesel Elektrik
Daya diesel elektrik yang dibutuhkan kapal untuk menghasilkan 8 knot dan mensuplai daya generator sebesar 755,722 HP.
𝑃d = 𝑃𝑜𝑤𝑒𝑟 𝐺𝑒𝑛𝑒𝑟𝑎𝑡𝑜𝑟 ɳ Generator
30
=755,722 / 0,8 = 944,653 HP
Jadi, daya diesel yang dibutuhkan generator untuk menghasilkan daya listrik ke motor listrik sebesar755,722 HP adalah 944,653 HP. Daya diesel listrik 910 kW atau 1220,31 HP. Sehingga daya diesel elektrik mampu mensuplai daya untuk kecepatan kapal 8 knot.
4.4 Data Kapal Berpenggerak Propulsi Mekanis
Berikut ini adalah beberapa data utama kapal dan system penggeraknya yang telah dikumpulkan oleh penulis selama melakukan penelitian dan pengamatan untuk mendukung proses analisa permasalahan dalam pengerjaan Tugas Akhir ini :
Nama Kapal : KM Tarik (Amex-19)
Length Between Prependicular (LPP) : 16,2m Length Overall (LOA) : 17,3 m
Breadth (B) : 4,5 m Depth : 2,25 m Draft : 1,64 m
Merk (Brand) Engine : Caterpillar Model : 3508
Effektif Power : 2 x 255 HP ( 2 x 188 kW) Putaran (Revolution) : 1200 RPM
Jumlah Silinder (no. of Cylinder) : V8, 4 Stroke- Cycle Diesel Bore x Stroke : 170 x190 mm
Gear Box Ratio : 1 : 4
4.5 Perhitungan Tahanan Kapal Berpenggerak Propulsi Mekanis
Untuk menghitung tahanan kapal digunakan sorfware Maxsurf dengan menggambarkan kapal berdasarkan lines plan kapal. Lines plan dibuat dengan bantuan sorfware AutoCAD dilanjutkan dengan penggambaran ulang di sorfware MaxsurfPro, selanjutnya di export ke sorfware Hullspeed untuk menentukan tahanan kapal.
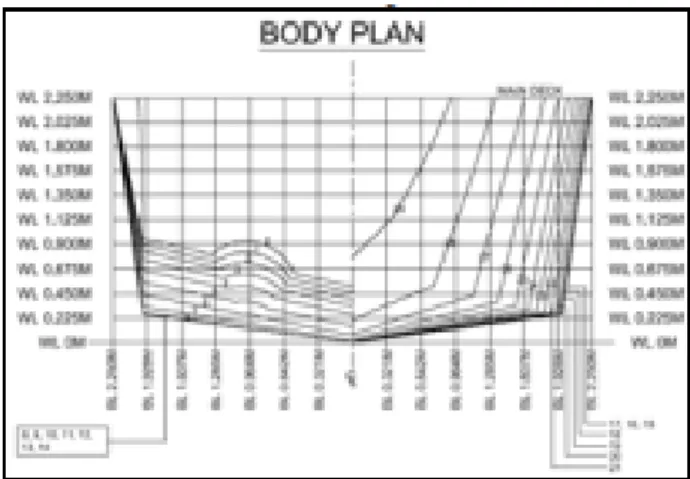
Gambar 4.1 Body plan KM Tarik
Kemudian dari gambar lines plan Kapal dilakukan pembuatan model di sorfware maxsurf.
Selain bentuk model, didapatkan juga data-data yang ditunjukkan dalam tabel pada sorfware maxsurf ini, seperti pada table gambar 4.2.
Gambar 4.2 Data Pada Maxusrf
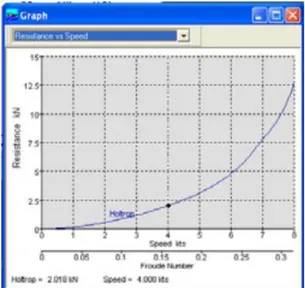
Sedangkan Untuk menentukan tahanannya digunakan sorfware Hullspeed dengan metode Holtrop dan dapat dilihat pada Gambar 4.3.
32
Gambar 4.3 Hasil Data berupa tahanan dan daya
Dari tabel terlihat bahwa tahanan kapal model 1 pada kecepatan 8 knot memiliki tahanan kapal sebesar 12,76kN dan Power yang dibutuhkan untuk menggerakkan kapal dibutuhkan daya sebesar 52,51 kW. Akan tetapi daya ini digunakan hanya untuk menggerakkan kapalnya sendiri, sedangkan untuk kapal yang di tarik harus ditambahkan.
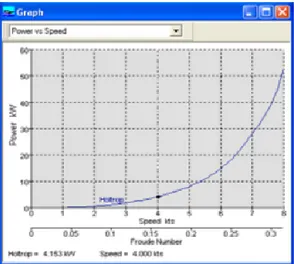
Selain dari data tahanan yang didapatkan pada sorfware maxsurf masih banyak lagi data-data yang didapatkan berhubungan dengan tahanan antara lain grafik pengaruh tahanan terhadap power, pengaruh perubahan speed terhadap power dan lain sebagainya seperti terlihat pada gambar grafik 4.4 dan 4.5
Gambar 4.5 Power vs speed
4.6 Perhitungan Daya yang dibutuhkan Kapal
Pada umumnya kapal yang bergerak di media air dengan kecepatan tertentu akan mengalami gaya hambat (Tahanan ) yang berlawanan dengan arah gerak kapal. Untuk dapat bergerak maka kapal harus memiliki daya yang lebih besar dari besarnya gaya hambat. Gaya dorong kapal (thrust) adalah gaya dorong kaoal yang dihasilkan dari kerja alat gerak kapal (propulsor). Dan daya yang disalurkan dari engine ke alat gerak kapal disebut (DHP) yang berasal dari daya prors (SHP).
• EHP (Efektif Horse Power)
Besarnya daya yang dibutuhkan untuk mengatasi gaya hambatan kapal. EHP = Vs x RT
= 4,116 x 14,674 = 60,398 Kw = 80,99 HP
• DHP (Delivery Horse Power)
Besarnya daya yang disalurkan oleh motor penggerak kapal ke baling-baling kapal yang kemudian dirubah menjadi daya dorong kapal.
DHP = EHP / Pc
Pc (Koefisien Propulsi) = ɳrr x ɳH x ɳp d. ɳH (Koefisien Lambung)
ɳH = (1-t) / (1-w)
w = perbandingan kecepatan kapal dengan air menuju propeller t = Thrust deduction factor
34 = 0,85 x 0,294 = 0,25 Sehingga ɳH = (1 – t) / (1 – w) = (1 – 0,25) / (1 – 0,294) = 1,061 e. ɳrr (Efisisensi Propeller)
propeller single creq 1,0 -1,1 di ambil 1,0 f. ɳP (Efisiensi Open Water)
Adalah efisiensi yang didapatkan ketika dilakukannya tes open water. Nilai 40 – 70% di ambil 70% = 0,7
Sehingga PC = ɳrr x ɳH x ɳp = 1,0 x 1,061 x 0,7 = 0,7427
Dan DHP didapat= EHP / PC = 80,99 / 0,7427 =109,048 HP
• SHP ( Shaft Horse Power)
Daya yang terukur hingga daerah di depan bantalan tabung poros (stern tube) dari system perporosan penggerak kapal.
SHP = DHP / ɳS = 109,048 / 0,98 = 111,27 HP
Besar daya main engine adalah daya keluaran pada pelayaran normal atau Service Continous Rating (SCR), dimana besarnya adalah 85% dari daya keluaran pada kondisi maksimum Continous Rating (MCR) dari main engine adalah
SHP mcr= SHP scr / 0,85 = 111,27 / 0,85 = 130,9 HP Daya Motor Diesel
Power yang dibutuhkan kapal untuk menghasilkan 8 knot adalah 97,61 Kw atau 130,9 HP.
Karena motor diesel masih dapat dikatakan 100% dapat menghasilkan daya 510 HP, sehingga disimpulkan, bahwa daya listrik lebih besar dari daya yang dibutuhkan kapal untuk mencapai 8 knot
Daya Motor > SHP
4.7 Perhitungan Torsi
Perhitungan torsi digunakan untuk mengetahui besar gaya putar yang dihasilkan oleh propeller. Sehingga didapatkan putaran prolepper setiap detikna adalah sebagai berikut
P = τ x ω
τ = 𝑃 ω Perhitungan torsi Kapal Propulsi Elektrik = P x 746 (kW) / 2 x π x rps
= 2000 x 746 /2 x 3,14 x 31,5 = 14920000/197,8
= 7542,21 kW / s
Perhitungan torsi Kapal Propulsi Mekanis = P x 746 (kW) / 2 x π x rps
= 510 x 746 /2 x 3,14 x 20 = 380460 / 125,6
= 3029 kW / s
Grafik 4.3 Putaran vs Torsi
0 5000 10000 15000 20000 25000 30000 35000 40000 0 5 10 15 20 25 30 35 To rs i, Kw /d eti k Putaran, RPS
Putaran VS Torsi
36
Variasi Putaran vs Torsi Kapal Propulsi Elektrik
No RPS Torsi 1 6.3308 37527.58 2 12.6616 18763.79 3 18.9924 12509.19 4 25.3232 9381.89 5 31.654 7505.516
Tabel 4.3 Variasi Putaran vs Torsi Kapal Propulsi Elektrik Variasi Putaran vs Torsi Kapal Propulsi Mekanis
No RPS Torsi 1 3.9984 15151.76 2 7.9968 7575.881 3 11.9952 5050.587 4 15.9936 3787.94 5 19.992 3030.352
Grafik 4.4 Torsi vs Power
Variasi Torsi vs Power Kapal Propulsi Elektrik
No Power Torsi 1 298400 1508.442 2 596800 3016.884 3 895200 4525.326 4 1193600 6033.768 5 1492000 7542.21
Tabel 4.5 Variasi Torsi vs PowerKapal Propulsi Elektrik Variasi Torsi vs PowerKapal Propulsi Mekanis
No Power Torsi 1 76092 605.828 2 152184 1211.656 3 228276 1817.484 4 304368 2423.312 5 380460 3029.14
Tabel 4.6 Variasi Torsi vs Power Kapal Propulsi Mekanis
0 200000 400000 600000 800000 1000000 1200000 1400000 1600000 0 2000 4000 6000 8000 Po w er, kW Torsi, kW/detik
Torsi VS Power
Kapal Propulsi Elektrik Kapal Propulsi Mekanis
38
Grafik 4.5Power vs Putaran
Variasi Power vs Putaran Kapal Propulsi Elektrik
No Power Putaran 1 298400 6.299 2 596800 12.598 3 895200 18.898 4 1193600 25.197 5 1492000 31.496
Tabel 4.7 Variasi Power vs PutaranKapal Propulsi Elektrik
0 5 10 15 20 25 30 35 0 500000 1000000 1500000 2000000 Pu ta ra n , RPS Power, kW
Power vs Putaran
Kapal Propulsi Mekanis Kapal Propulsi Elektrik
Variasi Power vs Putaran Kapal Propulsi Mekanis No Power Putaran 1 76092 4 2 152184 8 3 228276 12 4 304368 16 5 380460 20.001
40
BAB V
KESIMPULAN
5.1. KesimpulanBerdasarkan atas Analisa dan perhitungan makan didapatkan kesimpulan sebagai berikut:
1. Daya yang dibutuhkan kapal tunda berpenggerak propulsi elektrik untuk mencapaikecepatan 8 knot adalah sebesar 507,196 kW atau 680,150 Hp, dengan catatan kapal tunda propulsi elektrik750 GT. Sedangkan daya yang dibutuhkan kapal tunda berpenggerak propulsi mekanis untuk mencapai kecepatan 8 knot adalah sebesar 97,61 kW atau 130,9 Hp. Dengan catatan kapal tunda propulsi mekanis 30 GT.
2. Dari data analisa grafik antara pengaruh besarnya putaran motor terhadap torsi disimpulkan bawasannya torsi kapal tunda berpenggerak propulsi elektrik lebih tinggi dibandingkan dengan kapal tunda berpenggerak propulsi mekanis. Hal ini dibuktikan karena pada putaran 12 RPS, besar torsi pada kapal tunda berpenggerak propulsi elektrik adalah sebesar 18.500 kW/s dan torsi pada kapal tunda berpenggerak propulsi mekanis adalah 5.100 kW/s
3. Dari data analisa grafik antara pengaruh besarnya power terhadap torsi disimpulkan bawasannya torsi kapal tunda berpenggerak propulsi elektrik lebih tinggi dibandingkan dengan kapal tunda berpenggerak propulsi mekanis. Hal ini dibuktikan karena pada daya300.000 kW, besar torsi pada kapal tunda berpenggerak propulsi elektrik adalah sebesar 1.600 kW/s dan torsi pada kapal tunda berpenggerak propulsi mekanis adalah 2.400 kW/s
4. Dari data analisa grafik antara pengaruh besarnya daya terhadap putaran disimpulkan bawasannya putaran motor kapal tunda berpenggerak propulsi elektrik lebih rendah dibandingkan dengan kapal tunda berpenggerak propulsi mekanis. Hal ini dibuktikan karena pada daya 300.000 kW, besar torsi pada kapal tunda berpenggerak propulsi elektrik adalah sebesar 6,5RPS dan torsi pada kapal tunda berpenggerak propulsi mekanis adalah 15,8 kW/s
5.2. Saran
Untuk Pengembangan penelitian selanjutnya, maka beberapa hal yang bisa dilakukan adalah :
1. Menganalisa perbandingan system propulsi elektrik dengan propulsi mekanis secara ekonomis
42
2. Mencari data kapal yang memiliki nilai tidak jauh berbeda atau bisa juga menggunakan satu data kapal saja namun dirubah propulsinya agar semakin akurat dalam perbandingannya.
3. Ditambahkan system Towing Pull sebagai pembebanan tambahan agar analisanya bisa lebih berkembang
DAFTAR PUSTAKA
1. Simanjuntak Antoni, 2004, “Analisa Karakteristik Propulsi Listrik Berpenggerak Motor Listrik-DC pada Kapal KRI jenis Dewa Kembar-932”. Thesis Mahasiswa Teknik Sistem Perkapalan-ITS.
2. Rustantin Titik, 2005, “Analisa Sistem Propulsi Berpenggerak Motor Listrik Pada Kapal Klass Maruta Jaya 900 DWT”. Skripsi Mahasiswa Teknik Sistem
Perkapalan-ITS.
3. Desty Luna, 2013, “ Repowering diesel elektrik propulsion kapal KRI Dewa Kembar “. Skripsi Mahasiswa Teknik Sistem Perkapalan-ITS.
4.
Said, Muhammad Iqbal,2013,
“
System Diesel Electric Propulsion Sebagai
Alternative Penggerak Pada Kapal Ikan 10 GT”. Program Strata I Teknik
Perkapalan Fakultas Teknik Universitas Hasanuddin, Makassar.
5.
https://www.google.com/search?q=skema+sistem+propulsi+elektrik&client
=firefox-a&hs=K8S&rls=org.mozilla:en-US:official&channel=sb&source=lnms&tbm=isch&sa=X&ei=SfRzVK3CE
YPluQT7wYDACw&ved=0CAgQ_AUoAQ&biw=1366&bih=647
.
Diakses pada tanggal 22Agustus 2017
6.
http://engineeringbuilding.blogspot.com/2011/08/bagian-bagian-pada-generator-set-genset.html
. Diakses Pada tanggal 22 Agustus 2017
7.
http://www.scribd.com/doc/240426376/Perencanaan-Sistem-Propulsi-Elektrik
. Diakses Pada tanggal 18 Agustus 2017
8.
http://kangandreas.blogspot.com/2011/07/motor-listriksimpel-1.html
.
Diakses Pada tanggal 18 Agustus 2017
9.
https://www.google.com/search?q=bagian-
bagian+motor+listrik&client=firefox-a&hs=gxn&rls=org.mozilla:en-US:official&channel=fflb&tbm=isch&tbo=u&source=univ&sa=X&ei=uPZ
zVKiMGY-xuATqw4KwCw&ved=0CCEQsAQ
. Diakses Pada tanggal 18
44
LAMPIRAN
46
48
50