APLIKASI METODE AUGMENTED LAGRANGE
MULTIPLIER PADA OPTIMASI BENTUK
KANTILEVER
Nasrullah
(1), Sir Anderson
(1), Yazmendra Rosa
(1) (1)Staf Pengajar Jurusan Teknik Mesin, Politeknik Negeri Padang.
ABSTRACT
The globalization and free trade era all fields require be optimizing and working efficiently. In they are of design, optimization is used for reducing process times and production cost, increase quality, and the accuration of product design in other to produce competitive products. Optimization process also provide a systematic design procedure which can used for solving several design variables and constraints which are difficult to visualized graphically. Augmented Lagrange Multiplier (ALM) is promising optimization method because of the fast convergence rate and insensitive with penalty multiplier. Convergence rate is more influenced by the addition of Lagrange multiplier. The objective of this study is to understand ALM method and its characteristics, to create the computer program using this method and their application, to optimize the shape of a cantilever beam to get optimum design. The ALM method optimization software has already programed with several cases. This program can be applied in the other optimization cases. The optimization of a cantilever beam has applied to the program and resulted a minimum weight of 875, 56 kg in third model.
Keywords: Optimization, ALM, cantilever beam.
1. PENDAHULUAN
Ilmu tentang optimasi mandapat perhatian yang serius dari beberapa pihak. Semua ini sejalan dengan kompetisi di era globalisasi yang menuntut semua bidang untuk melakukan efisiensi dan optimasi. Pada
bidang perancangan, proses optimasi dilakukan
diantaranya untuk pengurangan waktu, biaya
produksi, jaminan kualitas, dan keakuratan hasil rancangan. Hal ini dilakukan untuk menghasilkan produk yang kompetitif dan dapat bersaing di pasaran.
Proses optimasi juga menyediakan prosedur
perancangan sistematis yang bisa menangani banyak
variabel perancangan dan kendala yang sulit
divisualisasikan secara grafik. Keberhasilan dalam
menggunakan teknik optimasi dalam prakteknya paling kurang ada 3 persyaratan yang harus dipenuhi yaitu pemodelan matematika dari problem optimasi perancangan, pengetahuan atau pengalaman dalam teknik optimasi, dan pengetahuan dalam program komputer. Untuk efisiensi dalam pemecahan problem
optimasi, banyak perangkat lunak yang bisa
digunakan, tetapi membutuhkan pengetahuan tentang
pemograman yang digunakan[1].
Pada dasarnya optimasi dapat dibagi menjadi 2 metode yaitu metode langsung (direct method) dan metode tidak langsung (indirect method).Metode langsung adalah metode optimasi meminimumkan problem optimasi tanpa mengubah fungsi objektif dan fungsi kendala. Untuk kasus masalah berkendala metode ini kurang efektif karena harus mencari syarat cukup dan perlu disemua titik di daerah
feasible, kemudian dibandingkan mana yang lebih optimum.
Metode tidak langsung adalah metode optimasi meminimumkan suatu problem berkendala yang diubah menjadi problem tanpa kendala dengan menambahkan penalti pada problem tersebut sebagai
ganti dari kendala yang dilanggar. Metode
Augmented Lagrange Multiplier (ALM) termasuk ke dalam metode ini, yang menambahkan pengali Lagrange untuk mempercepat laju konvergensi. Sehingga pengali penalti tidak berpengaruh secara signifikan dalam konvergensi. Kelebihan lain dari metode ini adalah pendekatan bisa dilakukan dari daerah feasible dan infeasible.
Perkembangan teknologi komputer yang sangat pesat dewasa ini, memudahkan kita untuk mempelajari dan
menyelesaikan masalah optimasi perancangan.
Optimasi perancangan dimodelkan dalam model
matematika dan kemudian diselesaikan dengan
program komputer. Akurasi dan ketelitian hasil
optimasi tergantung dari kesempurnaan model
matematika dan perangkat lunak yang digunakan.
Matlab adalah suatu program aplikasi dengan
kemampuan yang tinggi dalam perhitungan
matematis. Hal yang membedakan dengan program aplikasi lain adalah Matlab mempunyai komputasi, visualisasi dan pemograman dalam suatu paket tool yang mudah digunakan. Bahasa pemrograman yang digunakan pada Matlab mempunyai performa tingkat tinggi untuk memecahkan masalah yang menyangkut analisis perhitungan, baik secara analitik maupun numerik. Permasalahan dan solusi yang dihasilkan
Jurnal Teknik Mesin Vol. 8, No. 1, Juni 2011 ISSN 1829-8958
62 ditampilkan dalam ekspresi matematik yang sudah
lazim digunakan. Kelebihan Matlab terhadap bahasa
pemograman lainnya adalah kemudahan dalam
mendifinisikan matriks, penurunan persamaan
dengan fasilitas simbolik, dan fungsi-fungsi dengan jumlah cukup banyak[2].
Tujuan yang ingin dicapai dalam penulisan tesis ini adalah: Memahami metode Augmented Lagrange Multiplier untuk menyelesaikan masalah optimisasi
dengan berkendala. Membuat perangkat lunak
Augmented Lagrange Multiplier dengan program Matlab. Studi kasus, aplikasi optimasi metode ALM pada kasus beam kantilever.
Dengan adanya perangkat lunak metode ALM ini,
diharapkan membantu perancang dalam
menyelesaikan masalah-masalah optimasi, dan dapat
membuat atau merancang suatu produk yang
berkualitas, aman, dan biaya murah dalam bidang rekayasa.
2. PEMBUATAN PRANGKAT LUNAK METODE
AUGMENTED LAGRANGE MULTIPLIER
Dalam banyak kasus tidak mudah untuk
menyelesaikan problem optimasi dengan fungsi non linier secara eksak.Pencarian solusi suatu problem kadang-kadang membutuhkan formulasi matematika yang kompleks untuk memberikan solusi yang terbaik. Solusi optimum diperoleh dengan proses perhitungan yang panjang dan tidak praktis. Untuk
mengatasinya maka dikembangkanlah suatu
perangkat lunak untuk menyesaikan problem
optimasi perancangan, sehingga diperoleh solusi yang lebih baik, dalam watu cepat dan biaya lebih rendah.
Optimisasi numerik adalah salah satu alat yang diperlukan untuk menghasilkan perancangan yang optimum. Teknik optimasi numerik menawarkan
pendekatan matematika untuk mendapatkan suatu rancangan yang optimum[5].
Perangkat lunak yang akan dibuat adalah optimasi metode Augmented Langange Multiplier dengan bantuan program Matlab R2010a yang digunakan untuk perhitungan optimasi perancangan sehingga mendapatkan suatu hasil yang optimum. Pada bab ini akan dibahas mengenai diagram alir perangkat lunak, dan pembuatan perangkat lunak serta verifikasi dari perangkat lunak yang dibuat.
Perangkat lunak ini menggunakan M-file jenis
function file sehingga dapat digunakan untuk
beberapa kasus dengan input yang berbeda. Secara garis besar perangkat lunak dibagi menjadi 2 bagian besar, yaitu perangkat lunak utama Augmented Lagrange Multiplier, dan 3 sub perangkat lunak berupa function untuk fungsi objektif, fungsi kendala, fungsi pseudo-objektif
2.1. Problem dengan Kendala Kesamaan (Equality Constraint)
Problem dengan kendala kesamaan adalah problem
optimasi yang hanya mempunyai kendala
kesamaan.Fungsi kendala kesamaan (equality
constraints), disimbolkan dengan huruf h. Fungsi kendala kesamaan bisa terdiri dari satu atau lebih
dalam suatu permasalahan.Banyaknya variabel
perancangan dalam satu masalah harus lebih besar dari banyaknya kendala kesamaan yang ada. Bentuk fungsi kendala kesamaan sebagai berikut:
dengan l = banyak kendala kesamaan
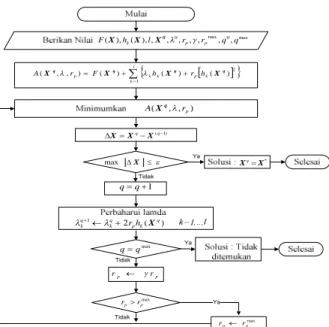
Pembuatan perangkat lunak untuk persoaalan
optimasi kendala kesamaan (equality constraint) mengikuti diagram alir berikut:
l k k p k k p F h r h r A 1 2 ) ( ) ( ) ( ) , , (Xq Xq Xq Xq ) , , ( rp A q X ) ( 2 1 q k p q k q k rh X ) 1 ( X Xq Xq X max p p r r max p p r r max p p r r max 0 max 0, , , , , , , ), ( ), ( h l r r q q F k p p 0 X X X * X Xq 1 q q max q q
63
2.2. Problem dengan Kendala Ketaksamaan
(Inequality Constraint)
Problem dengan kendala ketaksamaan adalah
problem optimasi yang hanya mempunyai kendala
ketaksamaan. Fungsi kendala ketidaksamaan
(inequality constraints), disimbolkan dengan huruf g. Fungsi kendala ketidaksamaan dapat lebih dari satu
dalam permasalahan perancangan, dan kendala sisi termasuk kedalam kendala ketaksamaan. Bentuk fungsi kendala ketidaksamaan sebagai berikut:
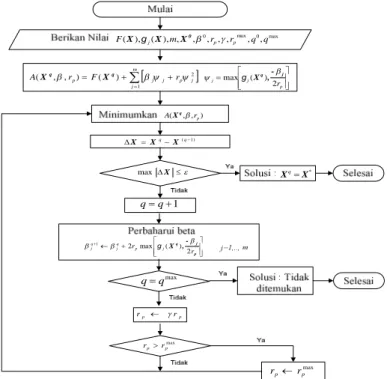
j= 1, ..., m Pembuatan perangakat lunak untuk problem optimasi
ketaksamaan (inequality constraint) mengikuti
diagram alir berikut:
m j j p j j p F r r A 1 2 ) ( ) , , ( q q X X p p r r max p p r r max p p r r ) , , ( rp AXq ) 1 ( X Xq Xq p j j max ( )2r j q, -X g X max p j q -, X r rp j q j q j 2 ) ( max 2 1 g max q q max 0 max 0 , , , , , , , ), ( ), ( m r r q q F j p p 0 X X X g * X Xq 1 q q
Gambar 2 Diagram alir penyelesaian masalah optimasi dengan kendala ketaksamaan
2.3. Problem dengan Kendala Gabungan (General Constraint)
Problem optimasi yang mempunyai kendala kesamaan dan taksamaan, prmbuatan perangkat lunak mengikuti diagram alir berikut:
p p r r max p p r r max p p r r l k k p k k m j j p j j p F r h r h r A 1 2 1 2 ( ) ( ) ) ( ) , , , (Xq Xq Xq Xq ) 1 ( q q X X X max 0 max 0 0, , , , , , , , , ), ( ), ( ), ( h lm r r q q F k j p p 0 X X X X g ) , , , ( rp AXq X max XqX* 1 q q ) ( 2 1 q k p q k q k rh X p j q, -X r rp j q j q j 2 max ( )2 1 g max q q
Gambar 3 Diagram alir penyelesaian masalah optimasi dengan kendala gabungan 0 ) ( X j g
Jurnal Teknik Mesin Vol. 8, No. 1, Juni 2011 ISSN 1829-8958
64 3.4. Verifikasi Hasil Perangkat Lunak
Untuk menentukan apakah program yang dibuat bekerja sesuai dengan teorinya, maka dilakukan
pengecekan atau verifikasi hasil dengan cara
menyelesaikan permasalahan optimasi sederhana, kemudian membandingkan hasil yang diperoleh dengan melakukan perhitungan analitik dengan hasil yang diperoleh dari perangkat lunak yang sudah dibuat.
Perangkat lunak juga dibandingkan dengan motode lain dengan cara menyelesaikan suatu permasalahan optimasi yang sudah ada penyelesaiannya dari
referensi[5]. Permasalahan yang diambil adalah
sebagai berikut:
Sebuah beam kantilever seperti “Gambar (4)”, panjang (L) 500 cm dibagi menjadi 5 segmen sama panjang, panjang masing-masing segmen li = 100 cm, P = 50 000 N,modulus elastisitas E = 200 GPa, tegangan bending izin σizin= 14 000 N/cm2,izin= 0,5
cm, dan ρ bahan = 0,007860 kg/cm3.Variabel
rancangan adalah tinggi (ti) dan lebar(bi). Kita ingin
menentukan tinggi variabel rancangan yang
meminimumkan berat tetapi tegangan bending dan defleksi di sepanjang x harus lebih kecil atau sama dengan yang diizinkan.
Gambar 4 Beam kantilever bertingkat
Penyelesaian: Minimum berat
Kendala:
Tegangan bending maksimum yang terjadi, harus lebih kecil atau sama dengan tegangan izin yang diberikan.
izin
max
Momen inersia tiap segmen i adalah:
Momen bending sisi kiri dari segmen i dapat dihitung dengan:
i j j i i P L l l M 1 12 3 i i i t b I Tegangan bending maksimum dari segmen i dapat dihitung i i i i I t M 2 Kendala 1 adalah g1(t, b): 0 1izin Kendala 2 adalah g2(t, b): 0 2izin Kendala 3 adalah g3(t, b): 0 3izin Kendala 4 adalah g4(t, b): 0 4izin Kendala 5 adalah g5(t, b): 0 5izin
Defleksi maksimum yang terjadi, harus dibawah defleksi izin yang diberikan.Defleksi maksimum terjadi pada segmen 5, jadi
izin
5
Dengan menggunakan metode integrasi ganda,
didapatkan persamaan defleksi i sisi kanan dari
segmen i. 1 1 ' 1 1 2 ' 1 1 ' ' 0 0 3 2 2 2 0
i i i i j j i i i i i j j i i i i l l l L EI Pl l l L EI Pl Kendala 6 adalah g6(t, b):Bentuk standard dari problem di atas adalah: 0
5izin
Variabel rancangan adalah t.
Minimum berat : ) ( ) , (t b b1t1l1 b2t2l2 b3t3l3 b4t4l4 b5t5l5 W terhadap : g1(t,b) : g2(t,b) : g3(t,b) : g4(t,b) : g5(t,b) : g6(t,b) : g7(t,b) : g6(t,b) : g9(t,b) : g10(t,b) : g11(t,b) : g12(t,b) : g13(t,b) : g14(t,b) : g15(t,b) : g16(t,b) : g17(t,b) : g18(t,b) : g19(t,b) : g20(t,b) : g21(t,b) :
Hasil optimasi yang diperoleh adalah sebagai berikut:
) ( ) , (t b b1t1l1 b2t2l2 b3t3l3 b4t4l4 b5t5l5 W 0 5izin 0 20 1 1 b t 0 1 1 b 0 5 1 t 0 1izin 2izin0 0 3izin 4izin0 0 5izin 0 20 2 2 b t 0 20 3 3 b t t420b4 0 0 20 5 5 b t 0 5 2 t t350 0 5 4 t t550 0 1 2 b 0 1 3 b b410 0 1 5 b
65
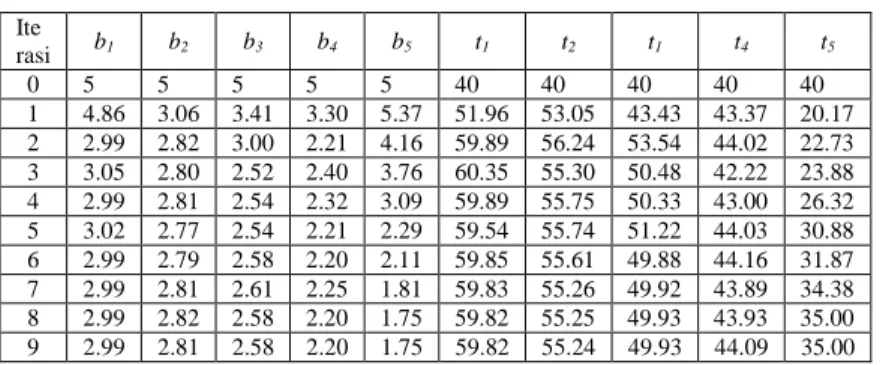
Tabel 1 Iterasi tinggi, lebar dan volume problem beam bertingkat Ite rasi b1 b2 b3 b4 b5 t1 t2 t1 t4 t5 0 5 5 5 5 5 40 40 40 40 40 1 4.86 3.06 3.41 3.30 5.37 51.96 53.05 43.43 43.37 20.17 2 2.99 2.82 3.00 2.21 4.16 59.89 56.24 53.54 44.02 22.73 3 3.05 2.80 2.52 2.40 3.76 60.35 55.30 50.48 42.22 23.88 4 2.99 2.81 2.54 2.32 3.09 59.89 55.75 50.33 43.00 26.32 5 3.02 2.77 2.54 2.21 2.29 59.54 55.74 51.22 44.03 30.88 6 2.99 2.79 2.58 2.20 2.11 59.85 55.61 49.88 44.16 31.87 7 2.99 2.81 2.61 2.25 1.81 59.83 55.26 49.92 43.89 34.38 8 2.99 2.82 2.58 2.20 1.75 59.82 55.25 49.93 43.93 35.00 9 2.99 2.81 2.58 2.20 1.75 59.82 55.24 49.93 44.09 35.00 Tabel 2 Perbandingan Iterasi volume dengan metode lain pada problem beam bertingkat
METODE ITERASI 1 2 3 4 5 program 0 100000 100000 100000 100000 100000 100000 1 17661 83824 79813 80589 50827 81499 2 25955 71806 72467 72488 64009 68964 3 30434 69033 68955 68345 64488 65748 4 34269 66574 67016 67744 65123 64427 5 39697 66065 66832 66145 65057 63264 6 43223 65760 66498 65887 65794 62745 7 49486 65736 66088 65704 65561 62434 8 51658 65746 65866 65665 65678 62215 9 57110 65866 65665 62150 10 60459 65866
Gambar 5 Grafik hubungan lebar dengan iterasi untuk problem beam bertingkat
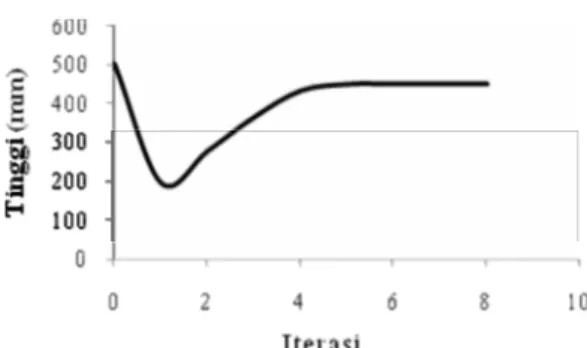
Gambar 6 Grafik hubungan tinggi dengan iterasi untuk problem beam bertingkat
Gambar 7 Grafik hubungan volume dengan iterasi untuk problem beam bertingkat
Hasil optimasi menggunakan perangkat lunak ALM, terdapat perbedaan hasil yang tidak begitu jauh dengan metode lain. Cek tegangan pada masing-masing segmen dan defleksi maksimum di peroleh
tegangan maksimum = 13999, 77 N/cm2dan defleksi
maksimum 0,374 cm. Masih di bawah tegangan izin dan defleksi izin.
3. STUDI KASUS OPTIMASI BENTUK BEAM
KANTILEVER MENGGUNAKAN METODE
AUGMENTEDLAGRANGEMULTIPLIER
3.1 Beam cantilever penampang sama
Sebuah beam kantileveryang sering digunakan pada
kontruksi “Gambar (8)”, mempunyai bentuk
penampang yang sama di sepanjang L. Beam dirancangdengan panjang L = 5000 mm, dan lebar b = 100 mm, untuk menahan beban terkosentrasi yang berada pada ujungnya sebesar P = 50 000 N.
Jurnal Teknik Mesin Vol. 8, No. 1, Juni 2011 ISSN 1829-8958
66 Modulus elastisitas E = 200000 MPa, Tegangan
bending izin σizin = 140 MPa, izin= 13,8 mm, dan ρ
bahan = 0,000007860 kg/mm3.Variabel rancangan
adalah tinggi t. Beam harus memenuhibatasan
tegangan bending izin dan defleksiizin. Kita ingin menentukan tinggi beam (t) yang meminimumkan berat beam tetapi tegangan bending dan defleksi di sepanjang x harus lebih kecil atau sama dengan yang diizinkan.
Gambar 8 Beam kantilever dengan penampang sama sepanjang x Diketahui: L = 5000 mm σizin= 140 MPa P = 50.000 N izin= 13, 8 mm E = 200000 MPa b = 100 mm ρ = 0,000007860 kg/mm3
Tentukan nilai t yang meminimumkan berat dari beam tetapi tegangan bending dan defleksi di sepanjang x harus lebih kecil atau sama dengan yang diizinkan.
Membuat model matematika dari permasalah yang ada
Fungsi objektif: Minimum berat Kendala :
Tegangan bending maksimum yang terjadi, harus di bawah tegangan izin yang diberikan.
Kendala 1 adalah g1(t) :
Defleksi maksimum yang terjadi, harus di bawah defleksi izin yang diberikan.
Persamaan defleksi Kendala 2 adalah g2(t):
Bentuk standar dari problem di atas adalah: Variabel rancangan adalah t,
Minimum berat : terhadap : g1(t): 0 6 2 izin bt PL g2(t): 0 4 3 3 izin Ebt PL
Hasil optimasi yang diperoleh adalah sebagai berikut:
Gambar 9 Grafik hubungan tinggi dengan iterasi pada problem beam kantilever
Gambar 10 Grafik hubungan berat dengan iterasi pada problem beam kantilever
Gambar 11 Grafik hubungan kendala g1(X) dengan iterasi
pada problem beam kantilever
Gambar 12 Grafik hubungan kendala g2(X) dengan iterasi
pada problem beam kantilever izin
max 0 6 2 Izin bt PL izin max 0 maxizin Ltb t W() 3 3 max 4 Ebt PL 67
Gambar 13 Grafik hubungan tegangandengan panjang pada problem beam kantilever
Gambar 14 Grafik hubungan defleksi dengan panjang pada problem beam kantilever
Dari proses optimasi problem di atas diperoleh hasil yang optimum sebagai berikut:
Tinggi (t) = 449, 1 mm, Berat (W) = 1765 kg,
Tegangan max = 74, 37 MPa, Defleksi mak = 13, 8 mm.
Kita menginginkan tegangan di sepanjang xsama, defleksi yang terjadi tidak melebihi defleksi yang diizinkan dengan mengubah inersia beam yang
dipengaruhi oleh t disepanjang x. Sehingga
didapatkan berat beam yang lebih ringan lagi. Untuk itu dibuatlah beberapa bentuk beam yang lain, tetapi
tidak mengurangi fungsi dari beam tersebut,
memenuhi batasan tegangan izin dan defeksi izin.
3.2 Optimasi Bentuk Beam Kantilever
Menggunakan Metode ALM
Beberapa rancangan bentuk beam yang akan
dilakukan optimasi untuk mendapatkan berat beam yang paling minimum diberikan berikut ini :.
Bentuk Bertingkat
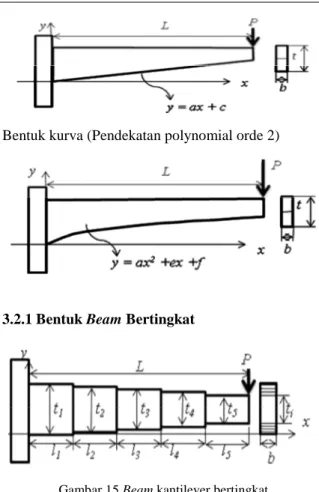
Beam Segitiga (Pendekatan polynomial orde 1)
Bentuk kurva (Pendekatan polynomial orde 2)
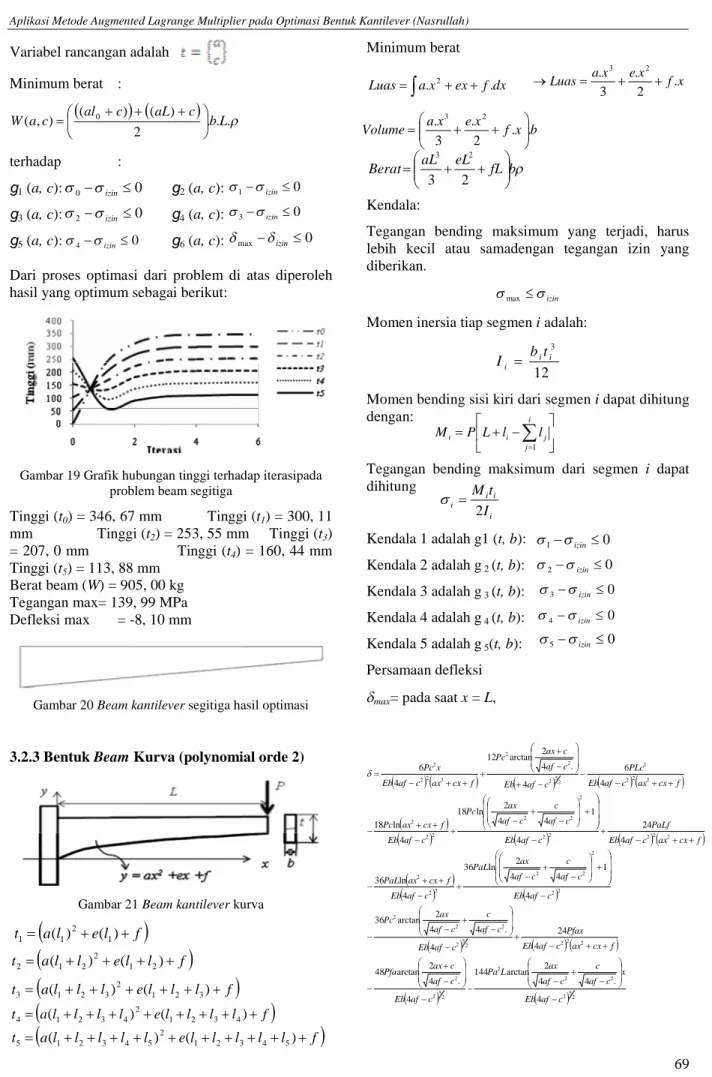
3.2.1 Bentuk Beam Bertingkat
Gambar 15 Beam kantilever bertingkat
Fungsi objektif: Minimum berat
Kendala:
Tegangan bending maksimum yang terjadi, harus lebih kecil atau sama dengan tegangan izin yang diberikan.
izin
max
Momen inersia tiap segmen i adalah:
Momen bending sisi kiri dari segmen i dapat dihitung dengan:
Tegangan bending maksimum dari segmen i dapat dihitung Kendala 1 adalah g1(t, b): Kendala 2 adalah g2(t, b): Kendala 3 adalah g3(t, b): Kendala 4 adalah g4(t, b): Kendala 5 adalah g5(t, b): ) ( ) (t bt1l1 bt2l2 bt3l3 bt4l4 bt5l5 W 12 3 i i i t b I
i j j i i P L l l M 1 i i i i I t M 2 0 2izin 0 3izin 0
4
izin
0 5
izin
0 1
izin
Jurnal Teknik Mesin Vol. 8, No. 1, Juni 2011 ISSN 1829-8958
68 Defleksi maksimum yang terjadi, harus dibawah
defleksi izin yang diberikan.Defleksi maksimum terjadi pada segmen 5, jadi
Dengan menggunakan metode integrasi ganda,
didapatkan persamaan defleksi isisi kanan segmen
i. 1 1 ' 1 1 2 ' 1 1 ' ' 0 0 3 2 2 2 0
i i i i j j i i i i i j j i i i i l l l L EI Pl l l L EI Pl Kendala 6 adalah g6(t, b):Bentuk standard dari problem di atas adalah: Variabel rancangan adalah t.
Minimum berat :
terhadap :
g1(t,b) : g2(t,b) :
g3(t,b) : g4(t,b) :
g5(t,b) : g6(t,b) :
Dari proses optimasi problem di atas diperoleh hasil yang optimum sebagai berikut:
Gambar 16 Grafik hubungan tinggi dengan iterasi pada problem beam bertingkat
Tinggi segmen 1 (t1) = 540, 36 mm Tinggi segmen 2 (t2) = 476, 87 mm Tinggi segmen 3 (t3) = 403, 68 mm Tinggi segmen 4 (t4) = 314, 50 mm Tinggi segmen 5 (t5) = 193, 35 mm Berat beam (W) = 1516 kg
Tegangan max = 80, 25 MPa
Defleksi max = 13, 80 mm
Gamba 17 Beam kantilever bertingkat hasil optimasi
3.2.2 Bentuk Beam Segitiga (polynomial orde 1)
Gambar 18 Beam kantilever segitiga
Minimum berat
Kendala:
Tegangan bending maksimum yang terjadi, harus lebih kecil atau samadengan tegangan izin yang diberikan.
izin
max
Momen inersia tiap segmen i adalah:
Momen bending sisi kiri dari segmen i dapat dihitung dengan:
Tegangan bending maksimum dari segmen i dapat dihitung Kendala 1 adalah g1(t,b) : Kendala 2 adalah g2(t,b) : Kendala 3 adalah g3(t,b) : Kendala 4 adalah g4(t,b) : Kendala 5 adalah g5(t,b) : Persamaan defleksi
max= pada saat x = L,
3 3 2 2 2 2 3 3 2 max ) ln( 12 6 6 . 1 2 1 12 ) ln( 12 ) ( 6 ) ( 6 Eba c Eba P c Eba PL Eb L c a c a c La P Eba c La P c La Eba Pc c La Eba PL
Bentuk standard dari problem di atas adalah:
izin 5 ) ( ) , (t b b1t1l1 b2t2l2 b3t3l3 b4t4l4 b5t5l5 W
a
l
l
l
l
l
c
t
5
(
1
2
3
4
5)
a
l
l
l
l
c
t
4
(
1
2
3
4)
a
l
l
l
c
t
3
(
1
2
3)
bL t t t W 2 ) ( ) ( 0 5
bL c aL c al 2 0 0 5izin 0 3izin 4izin0 0 5izin 0 1izin 2izin0
a
l
c
t
1
(
1)
a
l
l
c
t
2
(
1
2)
12 3 i i i t b I
i j j i i P L l l M 1 i i i i I t M 2 0 2izin 0 3izin 0 4izin 0 5izin 0 1izin 69 Variabel rancangan adalah
Minimum berat :
. . . 2 ) ( ) ( ) , ( 0 L b c aL c al c a W terhadap : g1(a, c): g2(a, c): g3(a, c): g4(a, c): g5(a, c): g6(a, c):Dari proses optimasi dari problem di atas diperoleh hasil yang optimum sebagai berikut:
Gambar 19 Grafik hubungan tinggi terhadap iterasipada problem beam segitiga
Tinggi (t0) = 346, 67 mm Tinggi (t1) = 300, 11
mm Tinggi (t2) = 253, 55 mm Tinggi (t3)
= 207, 0 mm Tinggi (t4) = 160, 44 mm
Tinggi (t5) = 113, 88 mm
Berat beam (W) = 905, 00 kg Tegangan max= 139, 99 MPa
Defleksi max = -8, 10 mm
Gambar 20 Beam kantilever segitiga hasil optimasi
3.2.3 Bentuk Beam Kurva (polynomial orde 2)
Gambar 21 Beam kantilever kurva
al el f
t ( ) (1) 2 1 1
a l l l l l el l l l l f
t ( )2 (1 2 3 4 5) 5 4 3 2 1 5
al l l l el l l l f
t ( )2 (1 2 3 4) 4 3 2 1 4
al l l el l l f
t ( )2 (1 2 3) 3 2 1 3
al l el l f
t ( ) (1 2) 2 2 1 2 Minimum berat Kendala:Tegangan bending maksimum yang terjadi, harus lebih kecil atau samadengan tegangan izin yang diberikan.
izin
max
Momen inersia tiap segmen i adalah:
12 3 i i i t b I
Momen bending sisi kiri dari segmen i dapat dihitung dengan:
Tegangan bending maksimum dari segmen i dapat dihitung Kendala 1 adalah g1 (t, b): Kendala 2 adalah g2(t, b): Kendala 3 adalah g3(t, b): Kendala 4 adalah g4(t, b): Kendala 5 adalah g5(t, b): Persamaan defleksi
max= pada saat x = L,
252 2 2 2 2 5 2 2 2 2 2 2 5 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 5 2 2 2 2 2 2 2 4 . 4 4 2 arctan 144 4 . 4 2 arctan 48 4 24 4 . 4 4 2 arctan 36 4 1 4 4 2 ln 36 4 ln 36 4 24 4 1 4 4 2 ln 18 4 ln 18 4 6 4 . 4 2 arctan 12 4 6 c af Eb x c af c c af ax L Pa c af Eb c af c ax Pfa f cx ax c af Eb Pfax c af Eb c af c c af ax Pc c af Eb c af c c af ax PaL c af Eb f cx ax PaL f cx ax c af Eb PaLf c af Eb c af c c af ax Pc c af Eb f cx ax Pc f cx ax c af Eb PLc c af Eb c af c ax Pc f cx ax c af Eb x Pc 0 0izin 1izin0 0 2izin 3izin0 dx f ex x a Luas
. 2 . f x x e x a Luas . 2 . 3 . 3 2 b x f x e x a Volume . . 2 . 3 . 3 2 b fL eL aL Berat 2 3 2 3 0 4izin maxizin 0
i j j i i P L l l M 1 i i i i I t M 2 0 2izin 0 3izin 0 4izin 0 5izin 0 1izin Jurnal Teknik Mesin Vol. 8, No. 1, Juni 2011 ISSN 1829-8958 70 252 2 2 5 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 5 2 2 2 2 5 2 2 2 2 5 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 5 2 2 2 4 . . 4 72 4 . 4 arctan . 48 . . 4 . . 4 . 1 4 ln 36 4 ln 36 4 24 4 1 4 ln 18 4 ln 18 4 6 4 . 4 arctan 24 . 4 4 arctan 144 4 4 arctan 72 ) 4 ( 18 ) 4 ( 36 ) 4 ( 12 ) 4 ( 6 4 . 4 4 2 arctan 72 4 . 4 4 2 arctan 72 c af Eb c c af c PaLarcta c af Eb c af c Pfa c f a a d b E c af c PaL c af Eb f PaL c af Eb PaL c af Eb c af c Pc c af Eb f Pc f c af Eb PLc c af Eb c af c Pc L c af Eb c af c L Pa c af Eb c af c ca f c af Eb Pc f c af Eb PaLc f c af Eb Pf f c af Eb PcL c af Eb ax c af c c af ax Pc c af Eb c c af c c af ax PaL
Dari proses optimasi dari problem di atas diperoleh hasil yang optimum sebagai berikut:
Gambar 22.Grafik hubungan tinggi dengan iterasi pada problem beam kurva Tinggi (t0) = 327, 3 mm Tinggi (t1) = 297, 5 mm Tinggi (t2) = 257, 4 mm Tinggi (t3) = 207, 0 mm Tinggi (t4) = 146, 4 mm Tinggi (t5) = 75, 5 mm Berat beam (W) = 875, 56 kg
Tegangan bending max = 139, 99 MPa
Defleksi maksimum = -8, 14 mm
Gambar 23 Beam kantilever kurva hasil optimasi
Perbandingan ketiga model bentuk beam kantilever
Gambar 24 Grafik perbandingan berat dengan iterasi pada ketiga model bentuk beam kantilever
Gambar 25 Grafik perbandingan tegangan dengan panjang pada ketiga model bentuk beam kantilever
Gambar 26 Grafik perbandingan defleksi dengan panjang pada ketiga model bentuk beam kantilever
Perbandingan tegangan maksimum, defleksi
maksimum yang terjadi pada tiap segmen beam dan berat untuk ketiga model “Tabel (3)”.
Tabel 3 Perbandingan tegangan max, defleksi max, dan berat untuk ketiga model bentuk beam kantilever
Dari ketiga optimasi bentuk beam kantilever di atas, terlihat pada kasus satu belum meratanya tegangan di sepanjang batang, dan pada tiap segmen terjadi kosentrasi tegangan. Untuk kasus dua dan tiga, tegangan sudah mulai merata di sepanjang batang, dan penurunan berat tidak terlalu signifikan. Untuk pemilihan bentuk beam yang akan digunkan perlu dilakukan perhitungan manufacturing dari beam, sehingga diperoleh proses dan biaya pembuatan yang paling minimum.
Gambar 27 Perbandingan ketiga model bentuk beam kantilever
4. KESIMPULAN DAN SARAN 4.1 Kesimpulan
1. Perangkat lunak optimasi dengan metode ALM
telah berhasil disusun dengan validasi pada beberapa kasus.
2. Dari berbagai kasus yang dibahas dapat dilihat
nilai optimal diperoleh dengan cepat (kurang dari 10 iterasi).
71
3. Perangkat lunak optimasi metode ALM yang
dibuat ini, dapat membantu perancang dalam menyelesaikan persoaalan optimasi, sehingga dapat mempercepat dan menghasilkan rancangan yang diharapkan.
4. Dari studi kasus optimasi bentuk beam
kantilever yang dilakukan, bentuk beam yang paling optimum adalah bentuk beam kantilever model kurva pendekatan orde 2, dengan berat beam 875, 56 kg.
4.2 Saran
Saran yang diajukan sehubungan dengan hasil penelitian ini adalah:
1. Karena pada penelitian ini membuat perangkat
lunak ALM dengan batuan program Matlab, mungkin kedepannya program ini dapat di gabungkan dengan program lain sehingga bisa
menyelesaikan problem optimasi yang
kompleks atau yang susah membuat model matematikanya.
2. Karena pada penelitian ini hanya dibahas studi
kasus optimasi bentuk beam kantilever dengan pendekatan sampai polinum orde 2, mungkin bisa di lanjutkan pada pilonum orde n, sehingga didapatkan hasil yang lebih bagus lagi.
3. Karena pada penelitian ini hanya ditinjau
masalah optimasi bentuk beam kantilever untuk satu penampang saja, mungkin bisa dicari dengan bentuk penampang yang lain sehingga didapatkan bentuk yang lebih ringan lagi. PUSTAKA
1. Venkataraman, P, Applied Optimization With
Matlab Programming. New York: John Wiley & Sons, Inc, 2001.
2. Sembiring, J. & Jenie, Y.I, Modul Pelatihan
Matlab, Institut Teknologi Bandung, Indonesia, 2010.
3. Wikipedia, Lagrange Multiplier. (Online),
November 2010. (http://www.wikipedia.org,
diakses November 2010).
4. Purwantara. B., Kekuatan Bahan.
(http://www.bambangpurwantana.staff.ugm.ac.id), di akses November 2010.
5. Vanderplaats, N.Garret, Numerical
Optimization Techniques for Engineering
Design With Application. McGraw-Hill Book Company. 1984.
6. Yang, W. Y.-S. Applied Numerical Methods
Using Matlab. New Jersey: A John Willey & Sons, Inc., Publication, 2005.
7. V. D. da Silva, Mechanics and Strength of
Materials. New York: Springer, 2006.
8. Louie L. Yaw. Steel Design – LRFD AISC Steel
Manual 13th Edition. Beam Limit States, 2008.
9. Hunt, B. R., Lipsman, R. L., & Jonathan M.
Rosenberg With Kevin R. Coombes, J. E. A Guide to Matlab for Beginners and Experienced Users. New York: Cambridge University Press, 2001.
10. Dong, S., Methods for Constrained
Optimization, 2006.
11. Luenberger, D. G., & Ye, Y. Linear and
Nonlinear Programming, Third Edition.
Stanford: Springer, 2008. CURRICULUM VITAE
Nasrullah, ST., MT adalah Staf Pengajar pada Jurusan Teknik Mesin Politeknik Negeri Padang. Menyelesaikan pendidikan S1 & S2 di ITB dalam bidang Teknik Mesin.
Sir Anderson, ST., MT., & Yazmendra Rosa, ST., MT. Adalah staf pengajar di Jurusan Teknik Mesin Politeknik Negeri Padang