Perancangan dan Implementasi Kontroler Sliding Mode
untuk Pengaturan Level pada Coupled Tanks
Okky Sugianto Harapan - 2208100171
Jurusan Teknik Elektro FTI-ITS, Surabaya 60111, e-mail : [email protected]
Abstrak–Sistem pengaturan level telah banyak diimple-mentasikan pada teknologi di industri. Tujuan pemakaian sistem pengaturan level adalah untuk mempertahankan cairan agar tetap berada pada level tertentu. Namun pada kenyataannya, pengaturan level tidak lepas dari berbagai kendala, misalnya perubahan beban. Perubahan beban pada level dapat menyebabkan perubahan parameter sehingga respon plant dapat berubah cukup signifikan. Sliding Mode Control (SMC) merupakan teknik pengaturan untuk sistem satu masukan satu keluaran (Single Input Single Output). SMC juga merupakan salah satu teknik pengaturan yang memiliki sifat kokoh sehingga dapat mengatasi perubahan parameter plant. Pada Tugas Akhir ini, didesain kontroler sliding mode untuk mempertahankan level cairan pada coupled tanks. Desain kontroler disimulasikan dan diimplementasikan pada Level and Flow Process Rig 38-100. Berdasarkan hasil pengujian, sistem pengaturan dengan kontroler sliding mode dapat mengatasi perubahan beban yang diberikan dan mampu mempertahankan level pada set point. Hal ini ditunjukkan dengan error steady state sebesar 0.43 % pada beban nominal, 3.29 % pada beban maksimal, dan 0.86 % pada beban minimal.
Kata Kunci : Coupled Tanks, Pengaturan Level, Sliding Mode Control
I. PENDAHULUAN
Pada proses produksi yang melibatkan fluida, suatu cairan dipompa dan dialirkan dari satu tangki ke tangki yang lain untuk diolah. Contoh pengolahan yang dimaksud adalah pencampuran dengan bahan kimia tertentu dan pemanasan. Dalam dunia industri terdapat beberapa jenis tangki. Ada jenis tangki yang tidak terhubung dengan tangki yang lain (single tank), ada pula yang tersusun dari beberapa tangki yang saling terhubung (coupled tanks). Jenis tangki yang paling sering ditemui di industri adalah coupled tanks, karena proses pengolahan yang terjadi dalam industri melibatkan banyak tangki dan saling berhubungan antara yang satu dengan yang lain.
Sistem pengaturan ketinggian cairan (level) telah banyak diimplementasikan pada teknologi sistem pengaturan industri. Tujuan pemakaian sistem pengaturan level adalah untuk mempertahankan cairan agar tetap berada pada level tertentu[1]. Pada kenyataannya, pengaturan level tidak lepas dari berbagai kendala, misalnya perubahan beban. Pemindahan cairan dari tangki satu ke tangki yang lain menyebabkan berubahnya level cairan pada tangki. Dalam pengaturan level, pemindahan cairan biasa disebut sebagai pembebanan pada level. Perubahan beban pada level dapat menyebabkan perubahan parameter proses. Perubahan parameter proses menyebabkan perubahan respon proses yang cukup signifikan sehingga
menimbulkan kesulitan dalam mempertahankan cairan pada level tertentu. Karena itu, diperlukan suatu teknik pengaturan yang tepat.
Sliding Mode Control (SMC) merupakan teknik pengaturan untuk sistem satu masukan satu keluaran (Single Input Single Output). SMC juga merupakan perluasan sistem pengaturan ON-OFF (switching) dan salah satu teknik pengaturan yang memiliki sifat kokoh sehingga cocok diterapkan pada plant/proses dengan ketidakpastian parameter. Pada Tugas Akhir ini akan dirancang dan diimplementasikan kontroler sliding mode untuk pengaturan level pada coupled tanks.
II. DASAR TEORI
A. Level and Flow Process Rig 38-100[2]
Plant yang digunakan dalam Tugas Akhir ini adalah Level and Flow Process Rig 38-100, yang merupakan salah satu produk dari Feedback. Plant ini merupakan modul latihan yang digunakan untuk memperkenalkan prinsip-prinsip dalam instrumentasi dan pengaturan level dan flow pada industri. Panel depan Level and Flow Process Rig 38-100 diperlihatkan pada Gambar 2.1.
Gambar 2.1. Level and Flow Process Rig 38-100
Pada Gambar 2.1 tampak bahwa Level and Flow Process Rig 38-100 memiliki dua buah tangki penampung air. Tangki yang pertama adalah tangki yang terletak di bawah, dimana terdapat pompa sentrifugal untuk memompa air melewati servo valve menuju tangki yang kedua, yaitu tangki yang terletak di atas . Tangki kedua merupakan tangki yang dibagi menjadi dua bagian dan saling terhubung melalui lubang (coupled tanks). Pada coupled tanks terdapat dua buah manual valve dan dua buah selenoid valve untuk mengalirkan air kembali ke tangki pertama, juga sebuah pipa besi yang berfungsi untuk mengalirkan air ke tangki bawah ketika coupled tanks menampung air lebih banyak dari kapasitasnya.
B. Metode Identifikasi Strejc[3]
Strejc merupakan salah satu metode dalam identifikasi dengan cara menarik garis singgung pada titik belok respon step plant/sistem dalam domain waktu. Metode identifikasi Strejc digunakan pada plant/sistem orde tinggi yang tidak memiliki overshoot. Contoh kurva yang menunjukkan respon step plant/proses orde tinggi ditunjukkan pada Gambar 2.2.
Gambar 2.2. Penarikan garis Strejc pada metode Strejc Untuk menentukan fungsi penghantar plant/sistem melalui identifikasi Strejc, maka perlu dilakukan beberapa prosedur terhadap respon step plant/sistem dalam domain waktu yang telah didapat dan prosedur tersebut sangat berkaitan dengan tabel Strejc seperti yang diberikan pada Tabel 2.1.
Tabel 2.1. Tabel untuk Parameter dengan Identifikasi Strejc n T Ta T Tu a u T T 1 1.000 0.000 0.000 2 2.718 0.282 0.104 3 3.695 0.805 0.218 4 4.463 1.425 0.319 5 5.119 2.100 0.410
Mengacu pada respon step step plant/sistem yang ditunjukkan pada Gambar 2.2, dapat dipilih fungsi penghantar plant/sistem sebagai berikut :
(
)
n s T Ts e K s G + ⋅ = − 1 ) ( τ (2.1)dengan parameter-parameter pada persamaan (2.1) dicari berdasarkan prosedur metode Strejc :
1. Hitung nilai K, di manaKmerupakan Gain Overall 2. Tentukan titik belok pada grafik respon step
3. Tentukan garis singgung pada titik belok 4. Dapatkan nilai Tu dan Ta
5. Dapatkan nilai n , yaitu nilai n terbesar pada tabel 2.1 ketika nilai
a u
T
T lebih besar daripada a u
T
T pada tabel 6. Dapatkan nilai T, dengan menggunakan nilai
T Ta pada tabel
7. Dapatkan nilai Tu', dimana a tabel a u u T T T T = '
8. Dapatkan nilai τ , dimana τ=Tu −Tu'
9. Jika τ bernilai negatif, maka n salah, kembali ke langkah 5
10. Subtitusikan nilai K , n , T , dan τ ke persamaan (2.1)
C. Sliding Mode Control (SMC)[4]
Untuk mendapatkan sinyal kontrol yang mampu membawa status trayektori menuju permukaan luncur dan mempertahankan status trayektori agar tetap berada di sekitar permukaan luncur, maka diperlukan dua macam sinyal kontrol. Sinyal kontrol yang pertama adalah sinyal kontrol ekivalen yang berfungsi untuk membawa status trayektori menuju permukaan luncur (u ) dan sinyal eq kontrol yang kedua adalah sinyal kontrol natural yang berfungsi untuk mempertahankan status trayektori agar tetap berada di sekitar permukaan luncur (u ). Sinyal N
kontrol total merupakan penjumlahan dari dua sinyal kontrol tersebut dan dapat ditulis :
N eq u
u
u = + (2.13)
Dari persamaan state suatu sistem, maka persamaan state juga dapat dituliskan :
Bu x A x&= + ) (ueq uN B x A x&= + + N eq Bu Bu x A x&= + + (2.14)
Sinyal kontrol ekivalen merupakan sinyal yang membawa status trayektori menuju permukaan luncur. Pada perhitungan sinyal kontrol ekivalen, sinyal kontrol natural bernilai nol dan σ&(x)=0, sehingga :
0 = +SBueq x SA x SA SBueq =− x SA SB ueq =−( )−1 (2.15)
Perhitungan sinyal kontrol natural :
N eq SBu SBu x SA x)= + + ( σ& N SBu x SA SB SB x SA x)= + (−( )− )+ ( 1 σ& N SBu x SA SB SB x SA x)= − ( )−1 + ( σ& N SBu x SA x SA x)= − + ( σ& N SBu x)= ( σ& (2.16)
Untuk mempertahankann trayektori state tetap berada pada permukaan luncur, maka syarat kestabilan Liapunov[5] harus terpenuhi : 0 ) ( ) (x ⋅σ x < σ & sehingga :
1. Pada saat σ(x)<0 maka haruslah σ&(x)>0 2. Pada saat σ(x)>0 maka haruslah σ&(x)<0 maka dapat dipilih :
)) ( ( ) (x W sat σ x σ& =− ⋅ (2.17)
dimana W >0 , dengan demikian dari persamaan (2.16) : )) ( ( x sat W SBuN =− ⋅ σ )) ( ( ) (SB 1W sat x uN =− ⋅ σ − (2.18)
maka sinyal kontrol total adalah :
N eq u u u = + )) ( ( ) ( ) (SB 1SAx SB 1W sat x u=− − − − ⋅ σ (2.19)
III. MODEL MATEMATIKA PLANT
Identifikasi pada Tugas Akhir ini dilakukan secara closed loop dengan kontroler proporsional pada ABB Commander C-350. Metode yang digunakan untuk identifikasi adalah metode identifikasi Strejc. Melalui analisis identifikasi Strejc dengan menggunakan tabel Strejc (Tabel 2.1), maka dapat dicari fungsi penghantar plant. Diagram blok untuk identifikasi plant ditunjukkan pada Gambar 3.1.
Gambar 3.1. Diagram blok identifikasi plant
Proses identifikasi dilakukan secara closed loop dengan memberikan sinyal uji berupa sinyal masukan step 70%. Parameter kontroler proporsional pada ABB Commander C-350 yang digunakan sebesar 3 atau setara dengan proportional band 33.33%. Proses pengambilan data dilakukan untuk setiap variasi beban dengan menggunakan LabVIEWTM 8.6 dengan waktu sampling sebesar 100 ms.
Gambar 3.2 menunjukkan valve yang digunakan untuk pembebanan Level and Flow Process Rig 38-100, lingkaran merah menunjukkan MV 3 kiri dan MV 3 kanan.
Gambar 3.2. Pembebanan pada sistem pengendalian level (Level and Flow Process Rig 38-100)
Dalam Tugas Akhir ini, plant dioperasikan dengan beban yang divariasikan dalam tiga keadaan, yaitu :
1. Beban Nominal : MV3 kiri dan kanan dibuka, SV 2 ditutup
2. Beban Maksimal : MV3 kiri dan kanan dibuka, SV 2 dibuka
3. Beban Minimal : MV3 kiri ditutup, MV 3 kanan dibuka, dan SV 2 ditutup
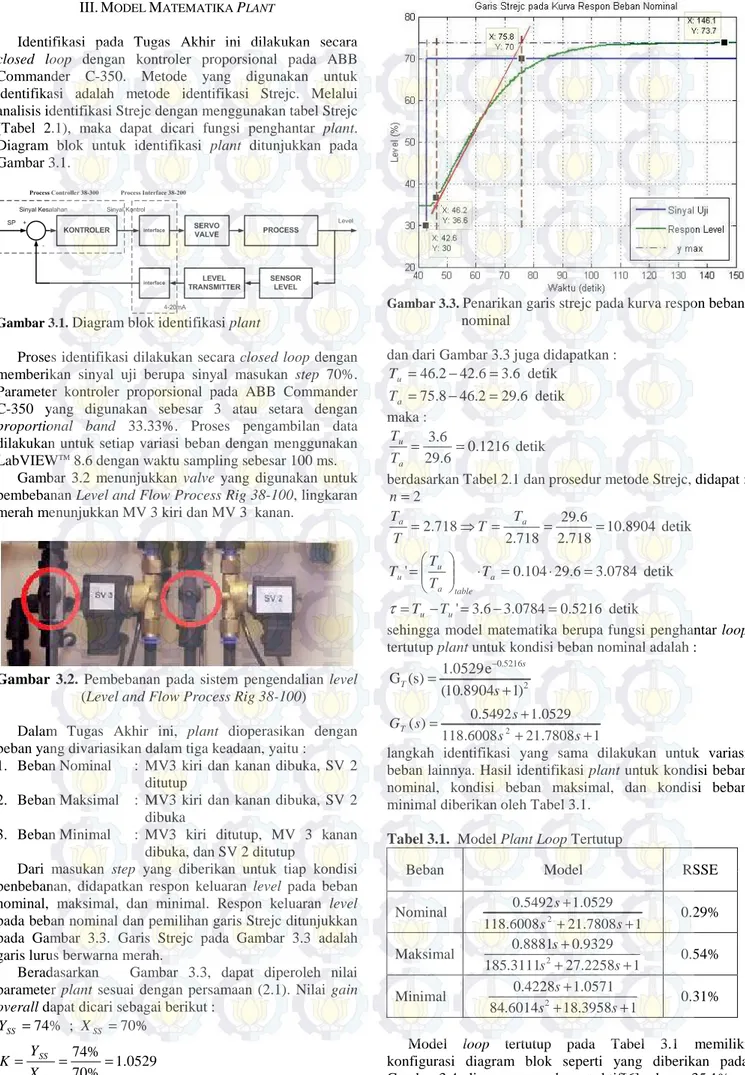
Dari masukan step yang diberikan untuk tiap kondisi penbebanan, didapatkan respon keluaran level pada beban nominal, maksimal, dan minimal. Respon keluaran level pada beban nominal dan pemilihan garis Strejc ditunjukkan pada Gambar 3.3. Garis Strejc pada Gambar 3.3 adalah garis lurus berwarna merah.
Beradasarkan Gambar 3.3, dapat diperoleh nilai parameter plant sesuai dengan persamaan (2.1). Nilai gain overall dapat dicari sebagai berikut :
% 74 = SS Y ; XSS =70% 0529 . 1 % 70 % 74 = = = SS SS X Y K
Gambar 3.3. Penarikan garis strejc pada kurva respon beban nominal
dan dari Gambar 3.3 juga didapatkan : 6 . 3 6 . 42 2 . 46 − = = u T detik 6 . 29 2 . 46 8 . 75 − = = a T detik maka : 1216 . 0 6 . 29 6 . 3 = = a u T T detik
berdasarkan Tabel 2.1 dan prosedur metode Strejc, didapat : 2 = n 8904 . 10 718 . 2 6 . 29 718 . 2 718 . 2 ⇒ = = = = a a T T T T detik 0784 . 3 6 . 29 104 . 0 ' ⋅ = ⋅ = = a table a u u T T T T detik 5216 . 0 0784 . 3 6 . 3 '= − = − =Tu Tu τ detik
sehingga model matematika berupa fungsi penghantar loop tertutup plant untuk kondisi beban nominal adalah :
2 5216 . 0 ) 1 8904 . 10 ( e 0529 . 1 (s) G + = − s s T 1 7808 . 21 6008 . 118 0529 . 1 5492 . 0 ) ( 2+ + + = s s s s GT
langkah identifikasi yang sama dilakukan untuk variasi beban lainnya. Hasil identifikasi plant untuk kondisi beban nominal, kondisi beban maksimal, dan kondisi beban minimal diberikan oleh Tabel 3.1.
Tabel 3.1. Model Plant Loop Tertutup
Beban Model RSSE
Nominal 1 7808 . 21 6008 . 118 0529 . 1 5492 . 0 2+ + + s s s 0.29% Maksimal 1 2258 . 27 3111 . 185 9329 . 0 8881 . 0 2+ + + s s s 0.54% Minimal 1 3958 . 18 6014 . 84 0571 . 1 4228 . 0 2+ + + s s s 0.31%
Model loop tertutup pada Tabel 3.1 memiliki konfigurasi diagram blok seperti yang diberikan pada Gambar 3.4, dimana manual reset aktif[6] sebesar 35.1%.
Gambar 3.4. Diagram blok identifikasi loop tertutup Dalam perhitungan model loop terbuka, diagram blok pada Gambar 3.4 dimodifikasi menjadi seperti yang ditunjukkan pada Gambar 3.5.
Gambar 3.5. Penyederhanaan diagram blok identifikasi loop tertutup
Sehingga didapatkan hubungan fungsi penghantar loop tertutup dan terbuka :
[
1 ( )]
) ( ) ( s G K K s G s G T P r T − + = (3.1)dimana GT(s) adalah model loop tertutup, G(s) adalah model loop terbuka, dan Kr adalah perbandingan dari manual reset dan set point.
Hasil perhitungan model plant loop terbuka dapat dilihat pada Tabel 3.2. Model loop terbuka ini adalah model matematika plant yang akan dikontrol.
Tabel 3.2. Model Plant Loop Terbuka
Beban Model Nominal 1 7307 . 217 7659 . 1211 0724 . 3 6026 . 1 2+ + + s s s Maksimal 1 8698 . 131 3721 . 923 3276 . 1 2638 . 1 2 + + + s s s Minimal 1 2851 . 191 3820 . 897 2024 . 3 3414 . 1 2+ + + s s s
IV. DESAIN KONTROLER
Model berupa fungsi penghantar plant beban nominal pada Tabel 3.2 akan dimisalkan menjadi suatu fungsi penghantar dengan variabel yang ditunjukkan pada persamaan (4.1) : w qs ps b as s U s Y s G + + + = = 2 ) ( ) ( ) ( (4.1) dimana : 0724 . 3 6026 . 1 = = b a 1 7307 . 217 7659 . 1211 = = = w q p
Model tersebut dapat juga direpresentasikan dalam bentuk persamaan state : r p w u p bp aq p a z z p q p w z z + − − + − − = 0 1 0 2 2 1 2 1 & & (4.2) dimana : e x z1= 1= e x x2 = &1=& u p a x z2= 2+ atau : r p w u p b x x p q p w u p a x x + − + − − = + 0 0 1 0 2 1 2 1 & & & (4.3)
Didefinisikan suatu permukaan luncur :
s
σ :
α
e+e&=0s
σ :
α
x1+x2 =0 dimana α>0maka didapatkan sinyal kontrol ekivalen :
(
)
eqeq wx p qx wr bu u
a& =− 1+
α
− 2+ − (4.4)dan sinyal kontrol natural :
(
)
NN K sat x x bu
u
a& = ⋅ α 1+ 2 − (4.5)
dimana K>0
Persamaan (4.4) dan (4.5) merupakan persamaan diferensial untuk sinyal kontrol ekivalen dan natural yang nantinya akan didesain pada diagram blok program kontroler. Sinyal kontrol total merupakan hasil penjumlahan dari sinyal kontrol ekivalen dan sinyal kontrol natural. Karena kontroler didesain dengan menggunakan LabVIEWTM 8.6 yang berorientasi grafis, maka persamaan diferensial untuk sinyal kontrol tidak perlu dicari solusinya. Sedangkan parameter kontroler sliding mode yang digunakan dalam Tugas Akhir ini adalah K=300 dan
15 . 0
=
α .
V. SIMULASI DAN IMPLEMENTASIPADA COUPLED TANKS
A. Hasil Simulasi
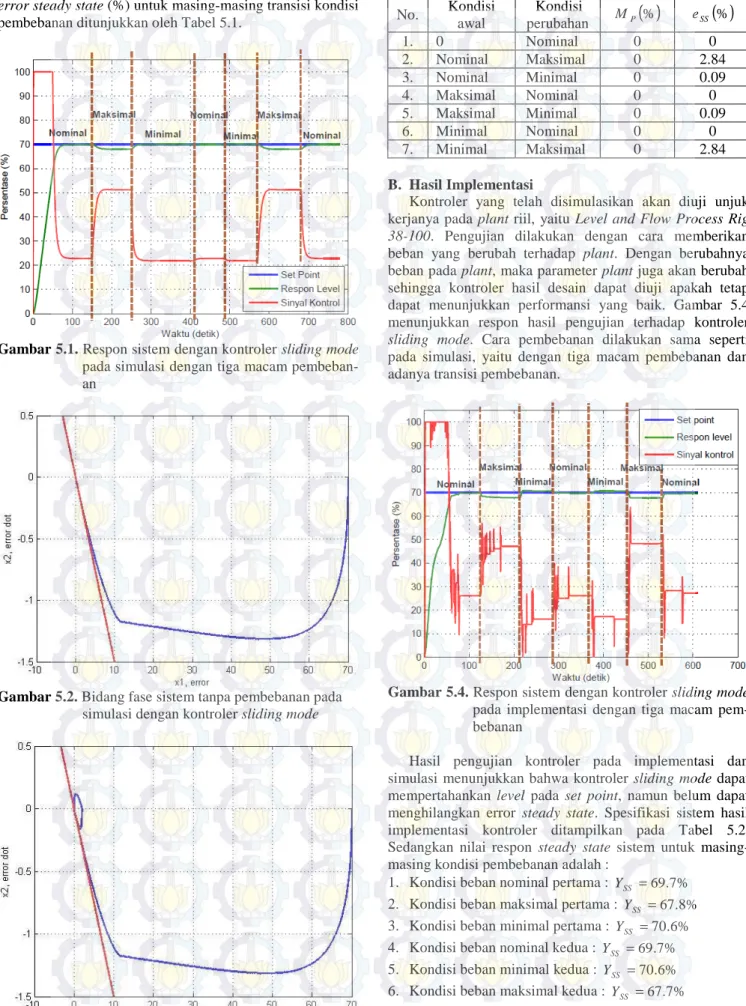
Pada bagian ini kontroler hasil desain akan disimulasikan dan diuji dengan diberikan pembebanan. Hasil uji pembebanan sistem pengaturan level dengan kontroler sliding mode pada program simulasi menggunakan LabVIEWTM 8.6 ditunjukkan oleh Gambar 5.1. Bidang fase sistem tanpa dan dengan pembebanan ditunjukkan oleh Gambar 5.2 dan Gambar 5.3. Pada Gambar 5.2 tampak bahwa trayektori sistem tanpa beban mengikuti permukaan luncur. Pada Gambar 5.3 tampak bahwa trayektori sistem dapat tetap bertahan di sekitar permukaan luncur ketika diberi beban.
Dari hasil simulasi, didapatkan respon steady state sistem dalam tiga kondisi pembebeanan adalah sebagai berikut :
1. Pada kondisi beban nominal : YSS =70% 2. Pada kondisi beban maksimal : YSS =68.013% 3. Pada kondisi beban minimal : YSS =70.063%
Hasil tersebut menunjukkan bahwa respon steady state sistem untuk kondisi beban maksimal dan minimal masih berada dalam rentang ±5% dari respon steady state pada
kondisi beban nominal sehingga settling time pembebanan (±5%) tidak perlu dihitung. Sedangkan overshoot (%) dan error steady state (%) untuk masing-masing transisi kondisi pembebanan ditunjukkan oleh Tabel 5.1.
Gambar 5.1. Respon sistem dengan kontroler sliding mode pada simulasi dengan tiga macam pembeban-an
Gambar 5.2. Bidang fase sistem tanpa pembebanan pada simulasi dengan kontroler sliding mode
Gambar 5.3. Bidang fase sistem dengan pembebanan pada simulasi dengan kontroler sliding mode
Tabel 5.1. Spesifikasi untuk transisi pembebanan pada simulasi No. Kondisi awal Kondisi perubahan MP
( )
% eSS( )
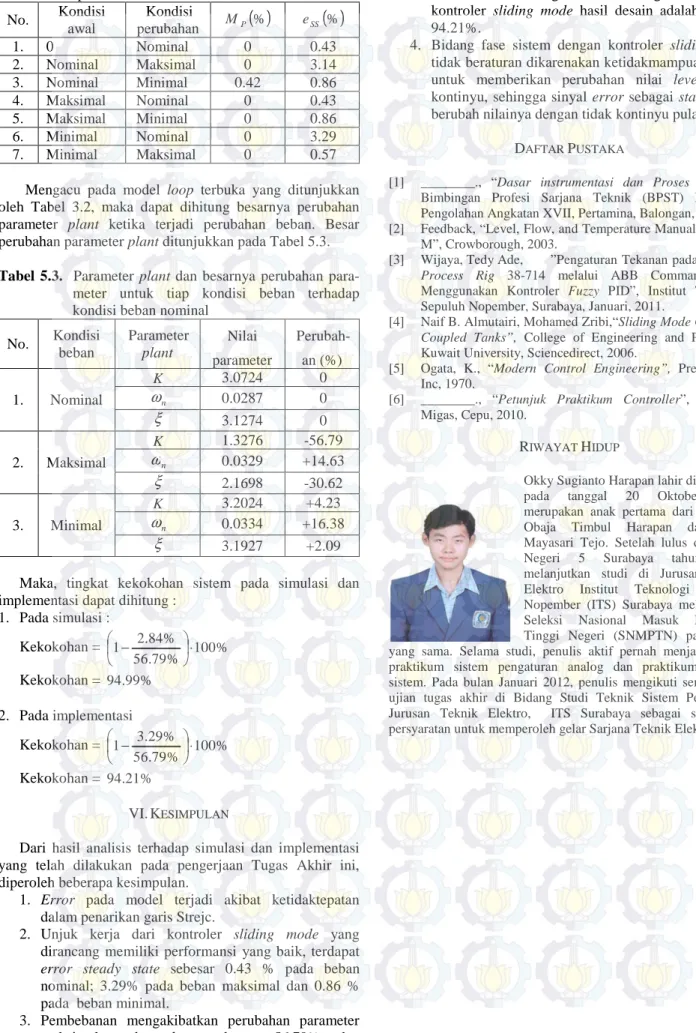
% 1. 0 Nominal 0 0 2. Nominal Maksimal 0 2.84 3. Nominal Minimal 0 0.09 4. Maksimal Nominal 0 0 5. Maksimal Minimal 0 0.09 6. Minimal Nominal 0 0 7. Minimal Maksimal 0 2.84 B. Hasil ImplementasiKontroler yang telah disimulasikan akan diuji unjuk kerjanya pada plant riil, yaitu Level and Flow Process Rig 38-100. Pengujian dilakukan dengan cara memberikan beban yang berubah terhadap plant. Dengan berubahnya beban pada plant, maka parameter plant juga akan berubah sehingga kontroler hasil desain dapat diuji apakah tetap dapat menunjukkan performansi yang baik. Gambar 5.4 menunjukkan respon hasil pengujian terhadap kontroler sliding mode. Cara pembebanan dilakukan sama seperti pada simulasi, yaitu dengan tiga macam pembebanan dan adanya transisi pembebanan.
Gambar 5.4. Respon sistem dengan kontroler sliding mode pada implementasi dengan tiga macam pem-bebanan
Hasil pengujian kontroler pada implementasi dan simulasi menunjukkan bahwa kontroler sliding mode dapat mempertahankan level pada set point, namun belum dapat menghilangkan error steady state. Spesifikasi sistem hasil implementasi kontroler ditampilkan pada Tabel 5.2. Sedangkan nilai respon steady state sistem untuk masing-masing kondisi pembebanan adalah :
1. Kondisi beban nominal pertama : YSS =69.7% 2. Kondisi beban maksimal pertama : YSS =67.8% 3. Kondisi beban minimal pertama : YSS =70.6% 4. Kondisi beban nominal kedua : YSS =69.7% 5. Kondisi beban minimal kedua : YSS =70.6% 6. Kondisi beban maksimal kedua : YSS =67.7% 7. Kondisi beban nominal ketiga : YSS =69.6%
Tabel 5.2. Spesifikasi untuk transisi pembebanan pada implementasi No. Kondisi awal Kondisi perubahan MP
( )
% eSS( )
% 1. 0 Nominal 0 0.43 2. Nominal Maksimal 0 3.14 3. Nominal Minimal 0.42 0.86 4. Maksimal Nominal 0 0.43 5. Maksimal Minimal 0 0.86 6. Minimal Nominal 0 3.29 7. Minimal Maksimal 0 0.57Mengacu pada model loop terbuka yang ditunjukkan oleh Tabel 3.2, maka dapat dihitung besarnya perubahan parameter plant ketika terjadi perubahan beban. Besar perubahan parameter plant ditunjukkan pada Tabel 5.3.
Tabel 5.3. Parameter plant dan besarnya perubahan para-meter untuk tiap kondisi beban terhadap kondisi beban nominal
No. Kondisi beban Parameter plant Nilai parameter Perubah-an (%) 1. Nominal K 3.0724 0 n ω 0.0287 0 ξ 3.1274 0 2. Maksimal K 1.3276 -56.79 n ω 0.0329 +14.63 ξ 2.1698 -30.62 3. Minimal K 3.2024 +4.23 n ω 0.0334 +16.38 ξ 3.1927 +2.09
Maka, tingkat kekokohan sistem pada simulasi dan implementasi dapat dihitung :
1. Pada simulasi : Kekokohan = 100% % 79 . 56 % 84 . 2 1 ⋅ − Kekokohan = 94.99% 2. Pada implementasi Kekokohan = 100% % 79 . 56 % 29 . 3 1 ⋅ − Kekokohan = 94.21% VI. KESIMPULAN
Dari hasil analisis terhadap simulasi dan implementasi yang telah dilakukan pada pengerjaan Tugas Akhir ini, diperoleh beberapa kesimpulan.
1. Error pada model terjadi akibat ketidaktepatan dalam penarikan garis Strejc.
2. Unjuk kerja dari kontroler sliding mode yang dirancang memiliki performansi yang baik, terdapat error steady state sebesar 0.43 % pada beban nominal; 3.29% pada beban maksimal dan 0.86 % pada beban minimal.
3. Pembebanan mengakibatkan perubahan parameter maksimal pada plant sebesar 56.79% dan
menyebabkan error steady state pada respon level sebesar 3.29%. Dengan demikian tingkat kekokohan kontroler sliding mode hasil desain adalah sebesar 94.21%.
4. Bidang fase sistem dengan kontroler sliding mode tidak beraturan dikarenakan ketidakmampuan sensor untuk memberikan perubahan nilai level secara kontinyu, sehingga sinyal error sebagai state sistem berubah nilainya dengan tidak kontinyu pula
DAFTAR PUSTAKA
[1] ________., “Dasar instrumentasi dan Proses Kontrol”, Bimbingan Profesi Sarjana Teknik (BPST) Direktorat Pengolahan Angkatan XVII, Pertamina, Balongan, 2007. [2] Feedback, “Level, Flow, and Temperature Manual :
38-901-M”, Crowborough, 2003.
[3] Wijaya, Tedy Ade, ”Pengaturan Tekanan pada Pressure
Process Rig 38-714 melalui ABB Commander 350
Menggunakan Kontroler Fuzzy PID”, Institut Teknologi Sepuluh Nopember, Surabaya, Januari, 2011.
[4] Naif B. Almutairi, Mohamed Zribi,“Sliding Mode Control of
Coupled Tanks”, College of Engineering and Petroleum,
Kuwait University, Sciencedirect, 2006.
[5] Ogata, K., “Modern Control Engineering”, Prentice-Hall Inc, 1970.
[6] ________., “Petunjuk Praktikum Controller”, Pusdiklat Migas, Cepu, 2010.
RIWAYAT HIDUP
Okky Sugianto Harapan lahir di Surabaya pada tanggal 20 Oktober 1990, merupakan anak pertama dari pasangan Obaja Timbul Harapan dan Lany Mayasari Tejo. Setelah lulus dari SMA Negeri 5 Surabaya tahun 2008, melanjutkan studi di Jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember (ITS) Surabaya melalui jalur Seleksi Nasional Masuk Perguruan Tinggi Negeri (SNMPTN) pada tahun yang sama. Selama studi, penulis aktif pernah menjadi asisten praktikum sistem pengaturan analog dan praktikum otomasi sistem. Pada bulan Januari 2012, penulis mengikuti seminar dan ujian tugas akhir di Bidang Studi Teknik Sistem Pengaturan, Jurusan Teknik Elektro, ITS Surabaya sebagai salah satu persyaratan untuk memperoleh gelar Sarjana Teknik Elektro.