BERBASIS MIKROKONTROLER
TUGAS AKHIR
Diajukan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Disusun oleh:
SOFIAN SEPTANTO HANDOYO
NIM: 035114051
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2007
BASED ON MICROCONTROLLER
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements
To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
By:
SOFIAN SEPTANTO HANDOYO
Student Number: 035114051
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2007
MOTTO:
“
JANGANLAH HENDAKNYA KAMU KUATIR TENTANG
APAPUN JUGA, TETAPI NYATAKANLAH DALAM
SEGALA HAL KEINGINANMU KEPADA ALLAH DALAM
DOA DAN PERMOHONAN DENGAN UCAPAN SYUKUR”
(FILIPI
4 : 6)
Kupersembahkan Tugas Akhir ini untuk
:
Yesus Kristus atas segala kasih dan kebaikannya,
Papa dan Mamaku dan segenap keluargaku
yang selalu memberikan doa & dukungan
Almamaterku Teknik Elektro USD
BERBASIS MIKROKONTROLER
Sofian Septanto Handoyo 035114051
INTISARI
Voting merupakan sarana untuk mencari suatu keputusan dalam musyawarah. Dengan perkembangan teknologi informasi saat ini, cara pelaksanaan voting dapat lebih mudah yaitu menggunakan bantuan komputer atau variasi teknologi lain yang dikenal dengan istilah electronic voting (e-voting). Untuk implementasi teknologi e-voting, maka akan dibuat sebuah mesin voting elektronik berbasis mikrokontroler.
Media untuk pemilihan suara pada e-voting terdiri dari sembilan balloting unit dengan lima tombol pilihan setiap unitnya. Masukan data tersebut kemudian diolah oleh control unit. Pada bagian ini terdapat empat buah mikrokontroler AT89S51 sebagai pusat pengendali. Tiga buah mikrokontroler slave berfungsi untuk menyimpan dan mengolah data pilihan hasil penekanan tombol suara. Dan sebuah mikrokontroler master berfungsi untuk menampilkan hasil akhir perhitungan suara pada penampil yang berupa LCD. Dalam tranmisi data antara mikrokontroler slave dengan mikrokontroler master menggunakan sistem komunikasi serial RS-485.
Mesin voting elektronik ini sudah dicoba dan terbukti dapat bekerja dengan baik. Hasil perhitungan jumlah suara yang ditampilkan pada LCD telah sesuai dengan tombol-tombol pilihan yang ditekan.
Kata kunci : E-voting, aplikasi mikrokontroler AT89S51, sistem komunikasi serial RS-485.
BASED ON MICROCONTROLLER
Sofian Septanto Handoyo 035114051
ABSTRACT
Voting is a way to find the final decision in a meeting. In this era of technology expansion, voting can be done in easier manner, that is using computer aided tools or another kind of technology which is known as electronic voting (e-voting). To implement this e-voting technology, the electronic voting machine which is based on microcontroller is going to be made.
The tool to do the voting of this e-voting device consists of nine balloting units with five buttons on each units. The data entry are then processed by the control unit. This part has four AT89S51 microcontrollers as controller. Three of them act as slaves and function to keep and process the selected data which are the result of the pressed buttons which are located on nine balloting units. And a master microcontroller function to drive the LCD which will display the result of the voting. The data transmission between slave microcontroller and master microcontroler use the serial communication system RS-485.
This electronic voting machine has been tested and is proved that it works well. The results of voting which are displayed on the LCDs are appropriate with the chosen pressed buttons.
Key word : E-voting, application of AT89S51 microcontroller, RS-485 serial communication system.
Puji syukur dan terima kasih penulis panjatkan kepada Allah Bapa atas segala
kasih karunia-Nya sehingga tugas akhir dengan judul “Mesin Voting Elektronik
berbasis Mikrokontroler” ini dapat diselesaikan dengan baik. Tugas akhir ini
merupakan salah satu syarat untuk memperoleh gelar Sarjana pada program studi
Teknik Elektro Universitas Sanata Dharma Yogyakarta.
Dalam proses penulisan tugas akhir ini penulis menyadari bahwa ada begitu
banyak pihak yang telah memberikan perhatian dan bantuan sehingga tugas akhir ini
dapat terselesaikan. Maka dari itu, penulis ingin mengucapkan terima kasih kepada :
1. Juru selamat dan sumber inspirasiku, Yesus Kristus.
2. Kedua orang tuaku tercinta Yulianto Handoyo dan Nanik Hariyani atas
segalanya yang telah diberikan, dan dikorbankan yang tak akan pernah
dapat ternilai harganya.
3. Ko Ony dan Cik Yenni beserta si kecil, Ko Sindhu dan Cik lili, Renitha
adikku serta semua keluarga yang telah memberikan semangat dan
dukungan yang luar biasa kepada penulis.
4. Bapak Martanto selaku dosen pembimbing I yang telah banyak
meluangkan waktu untuk memberikan bimbingan, pengetahuan, diskusi,
arahan, kritik dan saran kepada penulis dalam menyelesaikan tugas akhir.
5. Bapak Tjendro atas selaku dosen pembimbing II yang dengan senang hati
memberikan pengarahan, bimbingan dan segenap perhatiannya.
6. Mbak parminah (Pdt.GKMI Yogyakarta) dan Pak Jonathan (Pdt. Keluarga
Allah) yang memberikan bimbingan serta nasehat- nasehat imanku.
HALAMAN JUDUL...
LEMBAR PENGESAHAN OLEH PEMBIMBING...
LEMBAR PENGESAHAN OLEH PENGUJI...
LEMBAR PERNYATAAN KEASLIAN KARYA...
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP...
INTISARI...
ABSTRACT...
KATA PENGANTAR...
DAFTAR ISI...
DAFTAR GAMBAR...
DAFTAR TABEL...
BAB I PENDAHULUAN
1.1 Latar Belakang Masalah...
1.2 Rumusan Masalah...
1.3 Batasan Masalah...
1.4 Tujuan dan Manfaat Penelitian...
1.5 Metodologi Penelitian...
1.6 Sistematika Penulisan...
BAB II DASAR TEORI
2.1 Tombol...
2.1.2 Tombol NO SPST Momentary Contact...
2.1.2 Tombol NO DPST Momentary Contact...
2.2 Mikrokontroler AT89S51……...
2.2.1 Fasilitas yang dimiliki AT89S51………...
2.2.2 Deskripsi fungsi pin dari AT89S51……….….
2.2.3 Sistem Interupsi AT89S51……….…….…...…
2.2.4 Sistem Timer AT89S51……….……….…
2.2.5 Sistem Komunikasi Serial AT89S51……….
i
iii
iv
v
vi
vii
viii
ix
xi
xiv
xvi
1
2
2
3
3
4
5
5
6
6
7
8
9
12
15
2.2.7 Reset……….………..…………
2.3 LCD (Liquid Crystal Display)...
2.4 Standar Komunikasi Serial…...
2.4.1 Pengaturan Impedansi Terminal...
2.4.2 Pemberian Prasikap Pada Jaringan RS-485………....….…..
2.4.3 Pengaman Jaringan RS-485 Terhadap
Beda Potensial Listrik……….………...
BAB III PERANCANGAN
3.1 Diagram Blok Perancangan Mesin Voting Elektronik………..
3.2 Perancangan Perangkat Keras……….………...
3.2.1 Rangkaian Master………….……….….…..
3.2.1.1 Konstruksi Rangkaian Master………….…………..
3.2.1.2 Rangkaian reset……….
3.2.1.3 Rangkaian Osilator………
3.2.1.4 Tombol Start dan Tombol Timer...
3.2.1.5 Rangkaian Penampil LCD……….………
3.2.2 Rangkaian Slave………
3.2.2.1 Konstruksi Rangkaian slave...
3.2.2.2 Rangkaian Osilator dan Rangkaian Reset………...
3.2.2.3 Rangkaian Masukan Tombol...
3.2.2.4 Penampil waktu pemilihan……….
3.3 Komunikasi Serial….………..….
3.3.1 IC Komunikasi Serial RS-485...
3.3.2 Konfigurasi Jaringan...
3.3.3 Komponen Penyesuai Impedansi...
3.3.4 Pemberian Prasikap pada Jaringan...
3.3.5 Pengamanan Beda Potensial Untuk Jaringan...
3.4. Perancangan Perangkat Lunak………..
3.4.1 Pengiriman Data Serial………...…...
3.4.2 Diagram alir Utama pada Mikrokontroler Master…….…...
18
19
20
22
23
25
28
30
30
30
32
32
33
33
35
34
36
36
38
39
40
41
42
42
45
46
46
48
3.4.2.2 Subrutin Write_inst………
3.4.2.3 Subrutin Write_data………...
3.4.3 Diagram alir Utama pada Mikrokontroler Slave…….……...
3.4.3.1 Subrutin Pengecekan Keypad Tombol Pilihan……..
3.4.3.2 Proses pewaktu pemilihan tombol...
3.4.3.3 Pilihan abstain...
3.4.3.4 Subrutin tampilan countdown seven segment...
BAB IV HASIL DAN PEMBAHASAN
4.1 Hasil Akhir Perancangan...
4.2 Pengamatan Sistem...
4.2.1 Cara Menjalankan Mesin Voting Elektronik...
4.2.2 Pengamatan Kerja Alat keseluruhan...
4.2.3 Pengujian Kerja Sistem...
4.2.3.1 PengujianSistem dengan sebuah Rangkaian slave...
4.2.3.2 PengujianSistem dengan dua buah Rangkaian slave....
4.3 Sistem Catu Daya...
4.3 Transmisi Data Serial...
4.5 Pengaruh Panjang Kabel terhadap Sinyal Data...
4.6 Sistem Kerja Timer Batas Waktu Pemilihan...
4.7 Pengamatan dalam Penekanan Tombol Berdasarkan Waktu……….
BAB V KESIMPULAN DAN SARAN
5.1 Kesimpulan...
5.2 Saran...
DAFTAR PUSTAKA...
LAMPIRAN SPESIFIKASI ALAT...
LAMPIRAN LISTING PROGRAM...
LAMPIRAN RANGKAIAN LENGKAP...
LAMPIRAN DATASHEET... 50
51
51
53
55
56
57
58
60
60
60
63
63
64
65
66
69
70
71
74
74
75
L1
L2
L3
L4
Gambar 2.1 Konfigurasi SPST…... 6
Gambar 2.2 Konfigurasi DPST... 6
Gambar 2.3 Konfigurasi Pin AT89S51... 7
Gambar 2.4 Register Interrupt Enable…... 10
Gambar 2.5 Register TCON………... 13
Gambar 2.6 Register TMOD…………... 13
Gambar 2.7 Susunan bit dalam register SCON... 17
Gambar 2.8 Rangkaian osilator... 18
Gambar 2.9 Konfigurasi tombol reset……... 18
Gambar 2.10 Bentuk LCD 16x2………... 19
Gambar 2.11 Bagian LCD 16x2………... 19
Gambar 2.12 Sinyal dari pemancar (driver) dan penerima (receiver)……… 22
Gambar 2.13 (a) Rangkaian Parallel Termination dan (b) Rangkaian AC-Coupled Termination……….. 23
Gambar 2.14 Transceiver dengan resitor prasikap.……… 24
Gambar 2.15 Pemisahan ground dengan isolasi optik………..……. 26
Gambar 2.16 Penyambungan ground data dan ground lokal dengan Koneksi resistor... 26
Gambar 2.17 Sistem proteksi shunting device dengan menggunakan dioda zener... 27
Gambar 2.18 Sistem proteksi shunting device dengan menggunakan dioda zener dan fuse seri... 27
Gambar 3.1 Diagram blok dari Mesin Voting Elektronik……….... 28
Gambar 3.2 Display unit pada LCD 2 x 16………... 30
Gambar 3.3 Konfigurasi Rangkaian Master... 31
Gambar 3.4 Tampilan pada LCD 2 x 16... 34
Gambar 3.5 Konfigurasi Rangkaian Slave... 35
Gambar 3.6 Rangkaian matriks keypad 3 x 5... 37
Gambar 3.8 IC SN75176... 40
Gambar 3. 9 Rangkaian sistem komunikasi RS-485... 41
Gambar 3.10 Rangkaian RS-485 dengan konfigurasi multidrop 2 kabel... 41
Gambar 3.11 Komponen penyesuai impedansi... 42
Gambar 3.12 Rangkaian prasikap untuk jaringan... 45
Gambar 3.13 Rangkaian pengaman dengan metode shunting device... 45
Gambar 3.14 Diagram alirProses Pengiriman dan Penerimaan data….…… 46
Gambar 3.15 Frame Data Asinkron... 47
Gambar 3.16 Diagram Alir Program Utama Mikrokontroler Master... 49
Gambar 3.17 Diagram alir subrutin Write_inst... 50
Gambar 3.18 Diagram alir subrutin Subrutin Write_data... 51
Gambar 3.19 Diagram Alir Program Utama mikrokontroler slave... 52
Gambar 3.20 Diagram alir Subrutin pengecekan tombol……… 54
Gambar 3.21 Subrutin pilihan abstain... 56
Gambar 3.22 Subrutin tampilan countdown seven segment... 57
Gambar 4.1 Bentuk Fisik Mesin Voting Elektronik... 58
Gambar 4.2 Bentuk Fisik Rangkaian Master per bagian... 59
Gambar 4.3 Bentuk Fisik Rangkaian Slave per bagian... 59
Gambar 4.4 Tampilan Hasil Perhitungan pada LCD... 61
Gambar 4.5 Hasil Pengamatan Sinyal Data Format RS-485... 66
Gambar 4.6 Hasil Pengamatan Sinyal pada line B Format RS-485... 67
Gambar 4.7 Hasil Pengamatan Sinyal pada line A Format RS-485... 68
Gambar 4.8 Sinyal Masukan untuk RXD Mikrokontroler AT89S51... 68
Gambar 4.9 Sinyal data line B Format RS-485 pada jarak 15 meter... 69
Gambar 4.10 Sinyal data line B Format RS-485 pada jarak 32 meter... 70
Tabel 2.1 Fungsi khusus port 3………... 8
Tabel 2.2 Register IE (Interrupt Enable Register)……….. 11
Tabel 2.3 Prioritas Interupsi……….……... 12
Tabel 2.4 Mode Kerja timer/counter……….…….. 14
Tabel 2.5Pin Tampilan LCD……….. 19
Tabel 3.1 Penggunaan terminal port pada Mikrokontroler master………. 31
Tabel 3.2 Penggunaan terminal port pada mikrokontroler slave………… 35
Tabel 3.3 Kombinasi baris dan kolom matriks keypad………...… 37
Tabel 3.4 Daftar heksa dari tampilan angka pada seven segment... 38
Tabel 3.5 Daftar memori alamat penyimpanan setiap pilihan... 53
Tabel 4.1 Hasil Pengamatan Sistem Keseluruhan………... 62
Tabel 4.2 Hasil Pengamatan sistem dengan sebuah rangkaian slave. ……. 63
Tabel 4.3 Hasil Pengamatan sistem dengan dua buah rangkaian slave. …. 65 Tabel 4.4 Hasil pengukuran catu daya………. 66
Tabel 4.5 Hasil pengamatan pewaktu pada mikrokontroler... 70
Tabel 4.6 Hasil pengamatan penekanan tombol berdasarkan waktu.…….. 71
PENDAHULUAN
1.1. Latar Belakang Masalah
Dalam suatu musyawarah, voting sering kali digunakan untuk menemukan jalan
keluar yang dianggap paling baik untuk menyelesaikan permasalahan. Salah satu tipe
pelaksanaan voting yaitu dengan penggunaan kertas suara sebagai dasar untuk
perhitungan hasil, tahapan-tahapan kegiatannya seperti pendaftaran para pemilih,
pemungutan suara dan perhitungan hasil sangatlah tidak mudah dan membutuhkan
waktu yang lama. Hal ini disebabkan pengumuman hasil voting harus menunggu semua
kertas suara hasil proses pemungutan terkumpul terlebih dahulu dan sebelumnya juga
harus dilakukan pemeriksaan untuk keabsahan atau keaslian dari kertas suara itu
sendiri.
Dengan perkembangan teknologi informasi saat ini, cara pelaksanaan voting
dapat menggunakan bantuan komputer atau variasi teknologi lain yang dikenal dengan
istilah electronic voting (e-Voting). E-Voting tersebut diharapkan dapat mengurangi
sekaligus membantu menyelesaikan masalah-masalah yang muncul ketika
menggunakan kertas suara. Pada penelitian ini, akan dirancang sebuah model mesin
voting elektronik berbasis mikrokontroler AT89S51 yang menggunakan media tombol
pilihan sebagai pengganti kertas suara. Dengan mesin ini, para pemilih dalam
menentukan aspirasinya hanya dengan cara menekan sebuah tombol suara pada piranti
yang telah tersedia dalam waktu yang bersamaan. Kemudian data-data pilihan suara
tersebut disimpan dan akan diolah untuk proses perhitungan suara oleh mikrokontroler,
dan selanjutnya akan ditampilkan pada sebuah LCD (Liquid Crystal Display).
1.2 Rumusan Masalah
Permasalahan dalam penelitian ini dapat dirumuskan yaitu membuat sebuah
mesin voting elektronik yang dapat digunakan untuk melaksanakan proses pemungutan
dan perhitungan suara. Alat ini menggunakan tiga buah mikrokontroler AT89S51
sebagai slave, untuk mengolah masukan tombol pilihan yang terdiri dari sembilan unit.
Dan sebuah mikrokontroler AT89S51 sebagai master untuk menampilkan hasil
perhitungan suara pada LCD.
Dari uraian tersebut, masalah yang didapat adalah :
1. Bagaimana merancang dan membuat rangkaian antarmuka mikrokontroler,
tombol-tombol masukan dan LCD.
2. Bagaimana membuat perangkat lunak bahasa assembler pada
mikrokontroler untuk mengolah data masukan dan menampilkan hasil
perhitungan suara pada LCD ?
3. Bagaimana membuat komunikasi serial antar mikrokontroler ?
1.3 Batasan
Masalah
Batasan masalah pada alat ini adalah :
1. Terdapat sembilan unit masukan dengan lima tombol pilihan suara setiap
unitnya.
2. Batasan waktu pemilihan penekanan tombol suara adalah 10 detik dan 20
detik, jika belum dilakukan penekanan dalam waktu yang telah ditentukan
tersebut maka pilihan akan dianggap abstain.
3. Menggunakan empat buah mikrokontroler AT89S51 (1 sebagai master dan 3
4. Hasil voting ditampilkan pada LCD.
1.4
Tujuan dan Manfaat Penelitian
Peneliti mempunyai tujuan yang ingin dicapai, yaitu untuk merancang dan
membuat perangkat keras maupun perangkat lunak menggunakan mikrokontroler
khususnya seri AT89S51 yang dapat digunakan untuk mengolah dan menghitung hasil
dari proses pemungutan suaraserta kemudian ditampilkan pada LCD.
Penelitian ini diharapkan dapat memberikan manfaat :
1. Sebagai referensi yang dapat mendukung penelitian selanjutnya yang
berkaitan aplikasi mikrokontroler dan komunikasi serial.
2. Tersedianya sebuah mesin voting elektronik untuk memudahkan proses
pelaksanaan dan perhitungandengan cepat dan akurat.
1.5
Metodologi Penelitian
Adapun metodologi penelitian yang dilakukan terdiri dari :
1. Studi literatur, yaitu dengan mempelajari berbagai informasi, baik dari buku
maupun internet sehingga dapat digunakan sebagai referensi pendukung
dalam penyusunan laporan.
2. Perencanaan rancangan dan pembuatan alat dalam bentuk perangkat keras
maupun perangkat lunak.
3. Melakukan pengamatan dan pengujian terhadap hasil perancangan agar dapat
1.6 Sistematika
Penulisan
Sistematika penulisan tugas akhir ini terbagi menjadi lima bab yang disusun
sebagai berikut:
BAB I. PENDAHULUAN
Bab ini berisi tentang latar belakang masalah, tujuan dan manfaat
penelitian, perumusan masalah, batasan masalah, metodologi
penulisan, dan sistematika penulisan.
BAB II. DASAR TEORI
Bab ini berisi tentang dasar teori komponen-komponen yang akan
digunakan dalam penelitian .
BAB III. RANCANGAN PENELITIAN
Bab ini berisi tentang diagram blok dan penjelasan cara kerja secara
singkat rancangan perangkat keras dan perangkat lunak.
BAB IV. HASIL PENELITIAN DAN PEMBAHASAN
Bab ini berisi tentang hasi dan pengamatan kerja dari perangkat keras
dan perangkat lunak yang telah dibuat.
BAB V. PENUTUP
Bab ini berisi tentang kesimpulan dan saran untuk perbaikan alat dan
DASAR TEORI
Penggunaan peralatan elektronika untuk kegiatan manusia dapat dilakukan secara
efektif dan efisien. Begitu juga dengan pembuatan “MESIN VOTING ELEKTRONIK
BERBASIS MIKROKONTROLER” yang digunakan dalam proses untuk perhitungan
suara. Dalam perancangan dan pembuatan mesin voting elektronik ini, tentunya harus
terlebih dahulu mengetahui prinsip kerja dasar dan piranti atau komponen yang akan
digunakan.
2.1
Tombol
Tombol merupakan suatu komponen yang berfungsi untuk menghubungkan dan
memutuskan arus. Tombol tersusun dari titik sambungan yang terbuat dari bahan yang
tahan terhadap busur api (arc) yang disebabkan saat arus diputus dan saat arus terhubung.
Ada dua jenis tombol yaitu tombol NO SPST momentary contact dan tombol NO DPST
momentary contact.
2.1.1 Tombol NO SPST Momentary Contact
Tombol NO SPST (Normally Open Single Pole, Single Throw) momentary
contact adalah salah satu jenis saklar yang dalam keadaan normal berkondisi OFF
(Normally Open), berupa satu kutub (berasal dari satu sumber) dan
menghantarkan arus hanya ke satu beban. Penghantaran arus dan tegangan
(kondisi ON) dari suatu sumber terjadi jika tombol ditekan, dan pemutusan arus
dan tegangan (kondisi OFF) terjadi saat tombol dilepas atau ketika tidak ditekan,
sehingga dinamakan momentary contact. Konfigurasi SPST ditunjukan pada
gambar 2.1.
Gambar 2.1 Konfigurasi SPST.
2.1.2 Tombol NO DPST Momentary Contact
Tombol NO DPST (Normally open double pole, single throw) momentary
contact adalah salah satu jenis saklar yang dalam keadaan normal berkondisi OFF
(Normally Open) terdiri dari sepasang kontak yang dioperasikan secara
bersamaan dengan sekali penekanan konfigurasi DPST ditunjukan pada gambar
2.2. Penghantaran arus dan tegangan (kondisi ON) dari suatu sumber terjadi jika
saklar ditekan dan akan terputus (kondisi OFF) jika dilepas kembali.
Gambar 2.2 Konfigurasi DPST.
2.2 Mikrokontroler AT89S51
Mikrokontroler merupakan perkembangan dari mikroprosesor. Dalam sebuah chip
mikrokontroler telah terintegrasi memori, CPU dan I/O. Hal tersebut membuat
mikrokontroler dapat langsung dibuat sistem dengan menambahkan sedikit peripheral
lain. Sifat mikrokontroler yang mampu diprogram (programmable) menyebabkan
ini yang digunakan adalah mikrokontroler AT89S51 buatan Atmel dan merupakan
anggota keluarga MCS-51.
2.2.1 Fasilitas yang dimiliki AT89S51
Pada mikrokontroler AT89S51 mempunyai beberapa fitur standar yaitu
memiliki 4K bytes memori flash, 128 bytes RAM, 32 jalur I/O, watchdog timer,
dua data pointer register, dua timer/counter 16-bit, 5 sumber interupsi (dua buah
interupsi eksternal dan tiga buah interupsi internal), port serial full-duplex,
on-chip oscillator, dan untai clock. AT89S51 juga terdapat fasilitas ISP (In System
Programming), yang artinya mikrokontroler ini mampu diprogram meskipun
dalam kondisi bekerja, mikrokontroler AT89S51 memakai pin MOSI, MISO, dan
SCK untuk flash programming (mengisi program). Gambar 2.3 memperlihatkan
konfigurasi 40 kaki IC AT89S51.
2.2.2 Deskripsi fungsi pin dari AT89S51
1. Port 0 (kaki 32-39). Pada perancangan komponen minimum, port ini dapat
digunakan untuk port I/O dwi-fungsi. Untuk perancangan yang lebih besar
(dengan memori luar), port ini menjadi bus data dan bus alamat rendah.
2. Port 1 (kaki 1-8). Port ini dipakai untuk port I/O dwi-fungsi yang dilengkapi
dengan pullup internal. Saat flash programing jalur P1.5, P1.6, P1.7
digunakan masing-masing untuk saluran MOSI, MISO, dan SCK.
3. Port 2 (kaki 21-28). Port ini dipakai untuk I/O atau sebagai bus byte alamat
tinggi (high addres) untuk rancangan dengan memori luar.
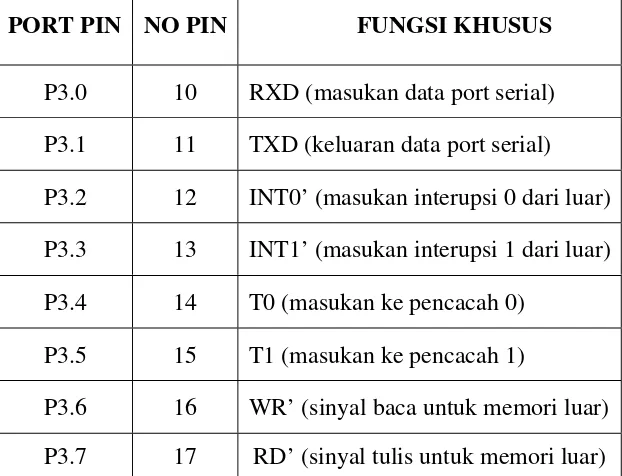
4. Port 3 (kaki 10-17). Port ini dipakai untuk I/O dwi-fungsi atau untuk fungsi
kendali khusus.Fungsi khusus port 3 ditunjukkan pada tabel 2.1.
Tabel 2.1. Fungsi khusus Port 3.
PORT PIN NO PIN FUNGSI KHUSUS
P3.0 10 RXD (masukan data port serial)
P3.1 11 TXD (keluaran data port serial)
P3.2 12 INT0’ (masukan interupsi 0 dari luar)
P3.3 13 INT1’ (masukan interupsi 1 dari luar)
P3.4 14 T0 (masukan ke pencacah 0)
P3.5 15 T1 (masukan ke pencacah 1)
P3.6 16 WR’ (sinyal baca untuk memori luar)
5. PSEN (Program store enable, kaki 29). PSEN merupakan keluaran untuk
sinyal kendali yang mengijinkan memori program (kode) eksternal.
6. ALE (Address Latch Enable, kaki 30). Sinyal keluaran ALE untuk
demultiplexing bus data dan alamat. Jika port 0 digunakan sebagai bus data
dan bus byte rendah alamat, ALE mengunci alamat ke register luar selama
setengah pertama siklus memori. Selanjutnya selama setengah kedua siklus
memori, jalur-jalur port 0 disediakan untuk data masukan atau keluaran ketika
perpindahan data sedang dilakukan.
7. Vpp (External Access, kaki 31). Untuk eksekusi program dari memori
eksternal maka kaki ini harus dihubungkan ground, sedangkan jika
mengakses program secara internal maka harus dihubungkan Vcc.
8. RST (Reset, kaki 9). Jika diberikan tegangan tinggi selama paling sedikit 2
siklus mesin, maka register internal akan diisi dengan harga tertentu untuk
kondisi awal sistem program.
9. Vcc (kaki 40) yang digunakan sebagai suplai tegangan mikrokontroler.
10.GND (kaki 20) digunakan sebagai ground mikrokontroler.
11.XTAL (kaki 19) dan (kaki 18) sebagai masukan dari rangkaian osilator.
2.2.3 Sistem Interupsi AT89S51
Mikrokontroler AT89S51 menyediakan 5 sumber interupsi, Interupsi
eksternal (External Interrupt) yang berasal dari kaki INT0 dan INT1, Interupsi
Port Serial (Serial Port Interrupt) yang berasal dari bagian penerima dan bagian
pengirim port Serial.
Semua sumber permintaan interupsi yang dibahas diatas, masing-masing
bisa diaktifkan atau di-non-aktifkan secara tersendiri lewat bit-bit yang ada dalam
register IE (Interrupt Enable Register) dalam SFR. Gambar 2.4 menunjukkan
register IE pada Mikrokontroler ATMEL AT89S51.
Gambar 2.4 Register Interrupt Enable
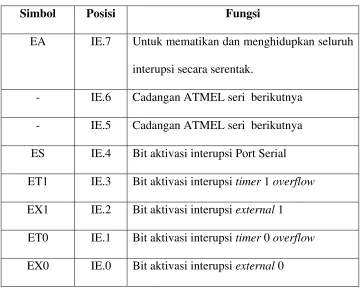
Fungsi-fungsi pin IE dapat dilihat pada Tabel 2.2. Pin IE7 digunakan
sebagai kontrol utama bagi interupsi-interupsi yang lain. Bila bit ini bernilai 0,
maka apapun kondisi bit lain dalam register ini, semua interupsi tidak akan
dilayani, oleh karena itu untuk mengaktifkan salah satu interupsi, bit ini harus
bernilai 1. Sedangkan Pin IE6 dan IE5 belum terimplementasikan pada
mikrokontroler AT89S51, karena digunakan untuk cadangan pada produk
mikrokontroler Atmel sejenis dimasa mendatang. IE4 dipergunakan sebagai bit
aktivasi interupsi port serial, apabila aktif maka interrupt akan terjadi setiap ada
data yang masuk ataupun keluar melalui port serial yang membuat Flag RI
(Receive Interrupt Flag) ataupun TI (Transmit Interrupt Flag) bernilai 1. Pin IE3
dan IE1 digunakan untuk timer 0 dan timer 1. Bila terjadi limpahan pada
dipergunakan sebagai input interupsi yang berasal dari luar, interrupt akan terjadi
pada saat terjadi pulsa low pada INT1 dan INT0.
Tabel 2.2 Register IE (Interrupt Enable Register)
Simbol Posisi Fungsi
EA IE.7 Untuk mematikan dan menghidupkan seluruh
interupsi secara serentak.
- IE.6 Cadangan ATMEL seri berikutnya
- IE.5 Cadangan ATMEL seri berikutnya
ES IE.4 Bit aktivasi interupsi Port Serial
ET1 IE.3 Bit aktivasi interupsi timer 1 overflow
EX1 IE.2 Bit aktivasi interupsi external 1
ET0 IE.1 Bit aktivasi interupsi timer 0 overflow
EX0 IE.0 Bit aktivasi interupsi external 0
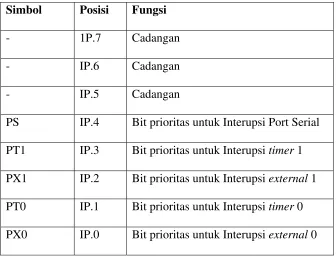
Dalam melayani Interupsi, mikrokontroler bekerja berdasarkan prioritas
yang dapat diatur pada Register Interrupt Priority. Sebuah interupsi yang
berprioritas tinggi dapat meng-Interrupt interupsi lain yang mempunyai prioritas
lebih rendah. sedangkan interupsi dengan prioritas tinggi itu sendiri tidak dapat di
interrupt oleh interupsi lain. Apabila terjadi lebih dari satu interupsi yang
mempunyai prioritas yang sama secara bersamaan, maka prioritas akan diatur
Tabel 2.3 Prioritas Interupsi.
Simbol Posisi Fungsi
- 1P.7 Cadangan
- IP.6 Cadangan
- IP.5 Cadangan
PS IP.4 Bit prioritas untuk Interupsi Port Serial
PT1 IP.3 Bit prioritas untuk Interupsi timer 1
PX1 IP.2 Bit prioritas untuk Interupsi external 1
PT0 IP.1 Bit prioritas untuk Interupsi timer 0
PX0 IP.0 Bit prioritas untuk Interupsi external 0
Vektor interupsi adalah harga yang disimpan ke program counter pada saat
terjadi interupsi sehingga program akan menuju ke alamat yang ditunjukkan oleh
program counter tersebut. Vektor interupsi untuk interupsi eksternal INT0 adalah
0003H, untuk interupsi timer 0 adalah 000BH, untuk interupsi ekternal INT1
adalah 0013H, untuk interupsi timer 1 adalah 001BH dan untuk interupsi port
serial adalah 0023H.
2.2.4 Sistem Timer AT89S51
Pada AT89S51 memiliki 2 buah timer yaitu timer 0 dan timer 1 yang
merupakan Timer/counter 16-bit. Timer 0 dibentuk dengan register TL0 (timer 0
low byte, alamatnya pada RAM internal adalah 6AH) dan register TH0 (timer 0
(timer 1 low byte, alamatnya 6CH) dan register TH1 (timer 1 high byte, alamatnya
6DH).
Untuk mengatur kerja timer/counter dipakai 2 register tambahan yang
dipakai bersama oleh timer 0 dan timer 1. Register tambahan tersebut adalah
register TCON (timer control register, alamatnya 88H dan bisa dialamat secara
bit) dan register TMOD (timer mode register, alamatnya adalah 89H).
Gambar 2.5 Register TCON.
TF1/TF0 : sebagai bit flag penampung overflow timer 1/timer 0
TR1/TR0 : sebagai bit pengatur aktif tidaknya timer 1/timer 0
IE1/IE0 : sebagai bit flag adanya interupsi eksternal I/O
IT1/IT0 : sebagai bit untuk mengatur level pemicuan IE1/IE0
Gambar 2.6 Register TMOD
Timer/counter akan bekerja Jika TRx (TR1 atau TR0, dalam TCON)
bernilai 1 dan Gate bernilai 1. C/T sebagai bit selektor untuk memilih timer atau
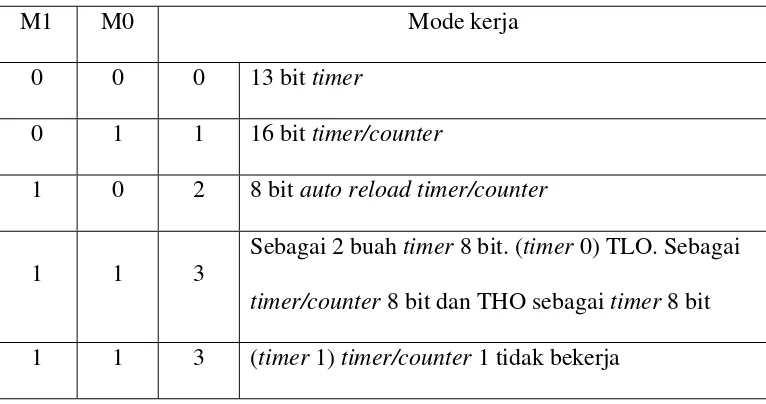
counter dan Gate merupakan pengatur saluran sinyal clock. M1/M0 digunakan
Tabel 2.4 Mode Kerja timer/counter
M1 M0 Mode kerja
0 0 0 13 bit timer
0 1 1 16 bit timer/counter
1 0 2 8 bit auto reload timer/counter
1 1 3
Sebagai 2 buah timer 8 bit. (timer 0) TLO. Sebagai
timer/counter 8 bit dan THO sebagai timer 8 bit
1 1 3 (timer 1) timer/counter 1 tidak bekerja
Pada Mode 0, Mode 1 dan Mode 2 Timer 0 dan Timer 1 masing-masing
bekerja sendiri, artinya bisa dibuat Timer 0 bekerja pada Mode I dan Timer 1
bekerja pada Mode 2, atau kombinasi mode lainnya sesuai dengan keperluan.
Berikut ini Mode-mode kerja sistem timer pada AT89S51:
1. Mode 0 (pencacah biner 13-bit)
Timer/Counter bekerja sebagai pencacah 13-bit, yaitu pada TLx
sebagai pencacah 5-bit dan THx sebagai pencacah 8-bit. Artinya TLx akan
mampu mencacah dari 00000000 - 00011111 tanda menghasilkan limpahan
(overflow), kemudian diteruskan THx dari 00000000 – 11111111. Setelah
TLx berisi 00011111 dan THx berubah menjadi TLx 00000000 dan THx
00000000 akan dihasilkan overflow.
2. Mode 1 (pencacah biner 16-bit)
Timer/Counter bekerja penuh 16-bit sehingga dapat mencacah sampai
menghasilkan limpahan (overflow) setelah berubah dari 11111111(TLx)
11111111(THx) ke 00000000 00000000.
3. Mode 2 (pencacah biner 8-bit reloaded)
Timer/Counter bekerja hanya sebagai pencacah 8-bit pada TLx dengan
data isian dari 8-bit THx setelah terjadi limpahan (overflow), yaitu ketika TLx
berubah dari kondisi 11111111 ke 00000000.
4. Mode 3 (Gabungan pencacah 16-bit dan 8-bit)
Pada mode 3 ini digunakan gabungan Timer/Counter 0 dan
Timer/Counter 1 sebagai pencacah 16-bit yang tidak menghasilkan limpahan
(overflow). Untuk menghasilkan limpahan harus mengaktifkan Timer/Counter
0, yaitu untuk menghasilkan limpahan TF0 danTH0 untuk menghasilkan TF1.
2.2.5 Sistem Komunikasi Serial AT89S51
Ada dua macam cara pengiriman (transmisi) secara serial yaitu
komunikasi sinkron dan komunikasi asinkron. Pada komunikasi sinkron sinyal
detak dikirim bersama-sama dengan data serial. Selanjutnya dalam transmisi data
serial secara asinkron, detak tidak dikirim bersama data serial.
Port serial pada AT89S51 bersifat duplex penuh atau full-duplex, artinya
port serial bisa menerima dan mengirim data pada waktu bersamaan. Port serial
memiliki penyangga penerima yaitu serial buffer (SBUF). Port serial dapat
menerima byte yang kedua sebelum byte yang pertama dibaca oleh register
penerima, melalui register SBUF. SBUF berhubungan dengan akumulator dalam
Port serial pada AT89S51 bisa digunakan dalam empat mode kerja. Semua
mode dapat diatur melalui register kontrol serial (SCON). Keempat mode kerja
tersebut adalah :
Mode 0 Mode ini bekerja secara sinkron, data serial dikirim dan diterima
melalui kaki P3.0 (RxD), sedangkan kaki P3.1 (TxD) dipakai untuk
menyalurkan detak pendorong data serial. Data dikirim/diterima 8 bit
sekaligus, dimulai dari bit yang bobotnya paling kecil atau LSB (bit 0),
diakhiri dengan bit yang bobotnya paling besar atau MSB (bit 7).
Kecepatan pengiriman data (baudrate) adalah 1/12 frekuensi kristal
yang digunakan.
Mode 1 Pada mode ini, data dikirim melalui kaki P3.1 (TxD) dan diterima
melalui kaki P3.0 (RxD) secara asinkron (begitu juga mode 2 dan 3).
Pada mode ini, data dikirim/diterima 10 bit sekaligus, diawali dengan
1 bit start, disusul 8 bit data (LSB pertama), diakhiri dengan 1 bit stop.
Penerima bit stop adalah RB8 dalam register Serial Control (SCON).
Kecepatan pengiriman data (baudrate) variabel bisa diatur sesuai
dengan keperluan.
Mode 2 Data dikirim 11 bit, diawali dengan 1 bit start, kemudian 8 bit data. Bit
ke-9 yang dapat diatur lebih lanjut dan diakhiri dengan 1 bit stop.
Pengirim bit 9 tersebut berasal dari bit TB8 dalam register SCON.
Pada AT89S51 yang berfungsi sebagai penerima bit 9 ditampung pada
ditampung. Kecepatan baudrate) bisa dipilih antara 1/32 atau 1/64
frekuensi kristal yang digunakan.
Mode 3 Mode ini sama dengan mode 2, hanya saja kecepatan pengiriman data
(baudrate) bisa diatur sesuai keperluan, seperti halnya pada mode
asinkron (mode 1, mode 2, mode 3).
Register kontrol dan status untuk port serial berada dalam SCON seperti
diperlihatkan pada gambar 2.7. Register ini mengandung bit-bit pemilihan mode
kerja port serial, bit data ke-9 pengiriman dan penerimaan (TB8 dan RB8) serta
bit-bit interupsiport serial(TI dan RI).
Gambar 2. 7. Susunan bit dalam register SCON
Nilai baudrate pada komunikasi serial ditentukan oleh kristal yang
digunakan, karena berpengaruh pada jumlah limpahan timer. Perhitungan
baudrate sesuai dengan persamaan 2.1.
1 Limpahan Laju
32 2SMOD
timer
Baudrate = × ………(2.1)
2.2.6 On-chip Oscillator
Mikrokontroler ATMEL AT89S51 telah memiliki on-chip oscillator yang
dapat bekerja dengan menggunakan kristal eksternal yang dihubungkan ke pin
XTAL1 dan XTAL2. tambahan kapasitor yang terhubung dengan ground
diperlukan untuk menstabilkan sistem. Gambar 2.8 menunjukkan cara
XTAL1 (pin 19)
C1
C2
XTAL2 (pin 18)
XTAL
kapasitor yang terpasang adalah 30 pF ± 10 pF disesuai dengan yang dinyatakan
pada datasheet.
VCC
R
RST
C
0
SW1
1 2
2.2.7 Reset
Gambar 2.9 menunjukkan konfigurasi tombol reset. Reset akan aktif bila
pin RST diberikan logika high selama 2 µs.
Gambar 2.9. Konfigurasi tombol reset.
Bila tombol reset tidak ditekan, maka pin RST akan mendapat masukan
logika low, sehingga mikrokontroler akan bekerja normal. Resistor dan kapasitor
digunakan untuk memperoleh waktu pengosongan kapasitor. Waktu pengosongan
kapasitor dapat dihitung sebagai berikut:
Gambar 2.8. Rangkaian osilator
C R
2.3 LCD (
Liquid Crystal Display
)
LCD (Liquid Crystal Display) adalah suatu penampil dari bahan cairan kristal
yang pengoperasiannya menggunakan sistem dot matriks. Pada perancangan alat ini
digunakan penampil LCD 2 16 karakter seperti terlihat pada gambar 2.10, yang artinya
LCD ini memiliki 2 baris dan 16 kolom karakter. Sehingga jumlah total karakter yang
dapat ditampilkan sekaligus adalah sebanyak 32 karakter. Masing-masing karakter
tersebut terbentuk dari susunan titik yang berukuran 8 baris dan 5 kolom dot.
×
Tabel 2. 5 Pin Tampilan LCD.
Nomor Pin Simbol Nomor Pin Simbol
1 VEE (0V) 9 DB2
2 VCC (5V) 10 DB3
3 GND (0V) 11 DB4
4 RS 12 DB5
5 R/W 13 DB6
6 E 14 DB7
7 DB0 15 A
LCD yang digunakan pada perancangan ini adalah LCD Module M1632 produk
dari SEIKO. Pada LCD ini terdiri dari 8 jalur data, 3 jalur kendali dan fasilitas
pengaturan kontras serta backlight. LCD ini dapat dikendalikan dengan mikrokontroler
atau mikroposesor. Deskripsi pin:
1. DB0 s/d DB7, merupakan jalur data yang dipakai untuk menyalurkan kode
ASCII maupun perintah pengatur kerja LCD tersebut.
2. RS (register select), merupakan pin yang dipakai untuk membedakan jenis
data yang dikirim ke LCD. Jika RS berlogika ‘0’, maka data yang dikirim
adalah perintah untuk mengatur kerja LCD tersebut. Jika RS berlogika ‘1’,
maka data yang dikirim adalah kode ASCII yang ditampilkan.
3. R/W (read/write), merupakan pin yang digunakan untuk mengaktifkan
pengiriman dan pengambilan data ke dan dari LCD. Jika R/W berlogika ‘0’,
maka akan diadakan pengiriman data ke LCD. Jika R/W berlogika ‘1’, maka
akan diadakan pengambilan data dari LCD.
4. E (enable), merupakan sinyal sinkronisasi. Saat E berubah dari logika ‘1’ ke
‘0’, maka data di DB0 s/d DB7 akan diterima atau diambil dari port
mikrokontroler.
5. VCC dan GND, Sebagai terminal power supply (+5V).
2.4. Standar Komunikasi Serial
Pada sistem pengiriman data secara serial ada dua cara dasar untuk pengiriman
data. Cara pertama menggunakan penghantar tidak seimbang (unbalanced line) dimana
hanya sebuah penghantar yang digunakan untuk mengirimkan data isyarat digital dengan
amplitudo sinyal tergantung pada beda potensial antara penghantar sinyal terhadap
ground. Cara kedua, yang dikenal dengan operasi diferensial atau seimbang (balanced
line) menggunakan dua penghantar untuk masing-masing arah pengiriman. Tegangan
positif diumpankan oleh terminal ke satu penghantar untuk menunjukkan logika 0,
sementara tegangan negatif untuk menunjukkan logika 1. Pada sistem ini kedua
penghantarnya selalu berfluktuasi sehingga selalu tercipta beda potensial pada kedua
penghantar. Hal inilah yang menyebabkan keunggulan sistem pengiriman data secara
seimbang, yaitu sinyalnya masih dapat terdeteksi pada jarak yang cukup jauh. Selain itu,
sistem pengiriman data secara seimbang ini lebih tahan terhadap noise karena noise
hanya memiliki satu nilai. Sistem pengiriman data serial secara seimbang ini biasanya
menggunakan sistem standar RS-422 dan RS-485.
Sistem pengiriman data secara serial dengan standar komunikasi serial RS-485
dikembangkan sejak tahun 1983 dan mampu mentransmisikan data yang cukup jauh yaitu
1,2 km. Standar komunikasi serial RS-485 dapat diterapkan pada suatu jaringan telepon
tunggal (party line) atau pada jaringan multidrop (jaringan yang menggunakan topologi
bus). Ada sebanyak 32 pasang pemancar (driver)/penerima (receiver) yang dapat
disatukan pada jaringan multidrop. Pada sisi pemancar (driver), akan menghasilkan
tegangan sebesar 2 sampai 6 Volt yang saling berbeda polaritasnya pada terminal A-B
dengan acuan titik tengah ground. Pada penerima (receiver) mampu menerima data
dengan nilai amplitudo sinyal minimal +200mV sampai –200mV hingga +6 V sampai –6
V (sinyal maksimal) yang masih dapat diterima antara terminal A-B seperti ditunjukkan
Gambar 2. 12 Sinyal dari pemancar (driver) dan penerima (receiver ).
2.4.1 Pengaturan Impedansi Terminal
Pengaturan impedansi terminal dimaksudkan agar sinyal dapat terserap
secara penuh oleh penerima dan tidak berbalik ke saluran transmisi kembali.
Pengaturan impedansi terminal ini beracuan pada panjang kabel pengahantar dan
kecepatan laju data yang digunakan sistem. Pengaturan impedansi terminal dapat
diabaikan bila delay propagasi saluran data lebih rendah dari lebar satu bit data.
Sebagai contoh sebuah sistem yang menggunakan kabel dengan panjang 600
meter, maka delay propagasi saluran dapat dihitung dengan mengalikan panjang
kabel dengan kecepatan laju propagasi yang biasanya sebesar 66% sampai 75 %
dari kecepatan cahaya (= 3 x108 m/s). Dengan panjang kabel 600 meter maka perjalanan bolak-balik data 1200 meter dengan laju propagasi 0,66 kecepatan
cahaya, sehingga delay propagasi sebesar 6,06μs. Bila perjalanan data sebanyak
tiga kali bolak-balik, pemantulan akan melemah maka sinyal akan stabil pada
18,18μs. Padahal lebar satu bit data untuk 9600 baud adalah 104μs sehingga pada
Ada dua macam pengaturan impedansi terminal, yaitu:
I. Dengan parallel termination.
Yaitu dengan menambahkan resistor yang dipasang paralel antara
terminal A dan B (Gambar 2.13 (a)) sebagai penyesuai impedansi. Nilai
resistor ini pada umumnya sebesar 100 Ω. Nilai ini didapatkan dari nilai
impedansi intrinsik kabel penghantar transmisi. Pemasangan resistor
terminasi harus diletakkan pada ujung jalur data, dan tidak boleh ada lebih
dua terminasi yang ditempatkan pada sistem, karena dapat menambah
pembebanan DC pada sistem tersebut.
II. Dengan AC-couple termination.
Yaitu dengan menambahkan sebuah kapasitor kecil secara seri
dengan resistor penyesuai impedansi yang dipasang paralel pada terminal A
dan B gambar (2. 13 (b)). Cara ini berfungsi untuk menghilangkan efek
pembebanan DC.
Gambar 2. 13 (a) Rangkaian Parallel Termination dan (b) Rangkaian AC-Coupled Termination
2.4.2 Pemberian Prasikap Pada Jaringan RS-485
Ketika suatu jaringan berada dalam keadaan idle (menunggu), semua
pada jaringan dan semua dalam keadaan tristate. Tanpa ada yang mengendalikan
jaringan, maka sistem dalam keadaan tidak menentu. Untuk memelihara status
idle dalam keadaan jaringan kosong maka perlu dipasangkan resistor yang
dirangkai pullup dengan saluran data B terhadap VCC (umumnya bernilai +5
Volt) dan resistor pulldown pada saluran data A terhadap ground. Gambar 2.14
memperlihatkan rangkaian transceiver dengan resistor prasikap.
Gambar 2. 14 Transceiver dengan resitor prasikap.
Untuk memperoleh nilai resistor prasikap adalah sebagai berikut :
- Masing-masing nilai impedansi untuk driver RS-485 adalah 12KΩ dan
dirangkai secara paralel, maka jumlah beban (Rbeban) adalah
n
beban R R R R
R
1 ... 1 1 1 1
3 2 1
+ + + +
= ………(2. 3)
dengan : n maksimal = 32
- Jumlah beban dirangkai paralel dengan 2 resistor penyesuai impedansi,
maka jumlah beban total (Rtotal) adalah
pi beban
total R R
R
2 1
1
+
= ……….(2. 4)
- Nilai amplitudo sinyal minimal adalah 200mV, maka arus ( I ) yang
total
R I
3
10 200× −
= ………..(2. 5)
- Untuk menciptakan arus prasikap sebesar I dengan tegangan catu 5V,
maka resistor ( R ) yang dibutuhkan sebesar
I
R= 5………...(2. 6)
- Resistor prasikap yang dipasangkan pada dua sisi yaitu antara VCC dengan
line B dan line A dengan ground maka nilai resistansi prasikap (Rprasikap)
adalah
2
R
Rprasikap = ………(2. 7)
2.4.3 Pengaman Jaringan RS-485 Terhadap Beda Potensial Listrik
Pada sistem komunikasi dengan standar RS-485 yang menggunakan dasar
sistem perbedaan potensial sinyal dengan besar nilai perbedaan sinyal maksimal 6
Volt maka dengan jauhnya jarak antar sistem memungkinkan besar nilai
amplitudo sinyal dapat berbeda karena setiap sistem menggunakan acuan ground
lokal yang berbeda. Untuk itu perlu kiranya dibedakan antara ground sinyal
dengan referensi sinyal komunikasi, sedangkan ground sinyal adalah grounding
lokal yang dapat juga mempunyai beda potensial terhadap ground referensi.
Untuk menanggulangi perbedaan ground yang dapat berakibat berbedanya
amplitudo sinyal maka dapat ditempuh dua cara pencegahan :
1) Dengan memisahkan antara ground data dengan ground local / casing /
ground power. Caranya dengan menggunakan koneksi optik (dapat berupa
optocoupler atau komponen optik yang lain). Gambar 2. 15
Gambar 2. 15. Pemisahan ground dengan isolasi optik.
2) Menyambungkan ground data dan ground lokal / ground power dengan
menggunakan konektor dengan impedansi rendah / dapat berupa resistor
dengan nilai resistansi kecil. Gambar 2. 16 memperlihatkan gambar
penyambungan ground data dan ground lokal dengan koneksi resistor.
Gambar 2. 16. Penyambungan ground data dan ground lokal dengan
koneksi resistor.
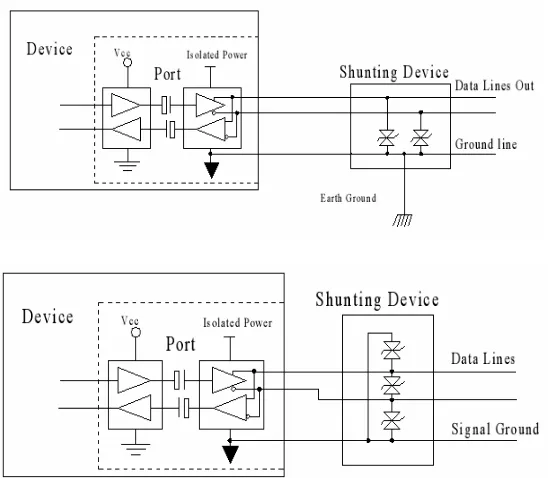
Ada pula pengamanan yang lain yaitu dengan metode shunting device.
Metode ini memiliki dua cara yanmg memiliki kelebihan masing-masing :
1) Cara pertama yaitu dengan memasangkan dioda zener bolak-balik secara
shunt terhadap ground ataupun terhadap masing-masing penghantar
jaringan. Kelebihan cara ini yaitu dapat memberi proteksi terhadap yang
tinggi tetapi kelemahannya memiliki batas ambang tegangan yang tinggi
dan tingkat pengamanannya lambat. Gambar 2.17 memperlihatkan
Gambar 2.17 Sistem proteksi shunting device dengan menggunakan
dioda zener.
2) Cara kedua dengan memasangkan dioda zener bolak-balik secara shunt
dan merangkaiakan fuse secara seri. Gambar 2.18 memperlihatkan
sistem proteksi shunting device dengan menggunakan dioda zener dan
fuse seri.
Gambar 2.18. Sistem proteksi shunting device dengan menggunakan
PERANCANGAN ALAT
3.1 Diagram Blok Perancangan Mesin Voting Elektronik
Dalam pembuatan dasar kerja alat “Mesin Voting Elektronik berbasis
mikrokontroler” ini diperlukan perancangan perangkat keras maupun perangkat lunak.
Perancangan peralatan yang dibuat meliputi penyusunan diagram blok, rancangan
perangkat keras dan bagan alir program (flow chart). Diagram blok “Mesin Voting
Elektronik” dapat ditunjukkan pada gambar 3.1.
CONTROL UNIT
DISPLAY UNIT MIKRO
MASTER
LCD
BALLOTING UNIT
MIKRO SLAVE 3
1 3 2
Seven Segment
MIKRO SLAVE 2
1 3 2
Seven Segment
MIKRO SLAVE 1
1 3 2
Seven Segment
Gambar 3.1. Diagram blok dari Mesin Voting Elektronik.
Berdasarkan gambar 3.1 diagram blok Mesin Voting Elektronik ini terdiri dari:
1. Control Unit.
Control unit digunakan untuk mengatur balloting unit dan display unit.
Dalam pengaturan balloting unit tugasnya adalah mengolah dan menentukan
tombol suara yang telah ditekan serta membatasi pemilih melakukan penekanan
hanya satu kali saja, sehingga disini tidak akan terjadi dua kali penekanan tombol
suara. Saat pelaksanaan voting, control unit memberikan pewaktuan selama 10
detik atau 20 detik yang ditampilkan secara countdown (mencacah turun) pada
seven segment, berfungsi sebagai tanda batas waktu bagi pemilih dalam pemilihan
tombol suara. Jika sampai batas waktu yang telah ditentukan tersebut telah habis,
pemilih belum melakukan penekanan dari salah satu tombol, maka control unit
secara otomatis menggangap bahwa pemilih pemilih abstain atau tidak memilih
salah satu dari pilihan-pilihannya.
2. Balloting Unit.
Balloting unit pada alat ini berjumlah 9 unit masukan, yang setiap unitnya
terdapat 5 tombol suara (pilihan A,B,C,D,E). Pemilih akan diberikan kesempatan
untuk menentukan aspirasi pilihannya dengan cara menekan salah satu dari kelima
tombol suara yang tersedia tersebut. Balloting unit berfungsi sebagai masukan data
bagi control unit.
3. Display unit.
Display unit yang digunakan berupa seven segment dan LCD. Seven
digunakan untuk menampilkan hasil akhir perhitungan jumlah pilihan suara dari
seluruh balloting unit.
DAFTAR PILIHAN
HASIL JUMLAH TIAP PILIHAN
Gambar 3.2. Display unit pada LCD 2 x 16
3.2. Perancangan Perangkat Keras
Perancangan perangkat keras untuk alat ini terbagi menjadi tiga yaitu
rangkaian master, rangkaian slave dan komunikasi serial RS-485.
3.2.1
Rangkaian
Master
3.2.1.1 Konstruksi Rangkaian Master.
Pada perancangan rangkaian master ini, Control unit (Mikrokontroler
ATS8951) digunakan sebagai pengirim data pewaktuan yang telah ditentukan
sebelumnya dan sebagai penerima hasil data tiap pilihan suara dari tiap-tiap
rangkaian slave. Data pilihan yang telah diterima tersebut akan diolah kembali
untuk mendapatkan hasil perhitungan akhir dari tiap-tiap pilihan suara, kemudian
akan ditampilkan pada display unit yang berupa LCD. Dalam pengiriman dan
penerimaan data mikrokontroler master menggunakan komunikasi serial standar
RS-485.
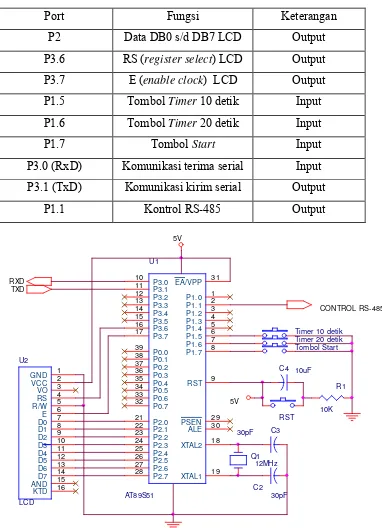
Gambar 3.3 menunjukkan antarmuka konfigurasi rangkaian master dengan
LCD dan tiga buah tombol yang dihubungkan pada ground terdiri dari dua buah
tombol timer yaitu 10 detik dan 20 detik untuk menentukan batas waktu
voting. Sedangkan penggunaan teminal port mikrokontroler master yang
digunakandapat dilihat pada tabel 3.1.
Tabel 3.1 Penggunaan terminsl port pada Mikrokontroler master.
Port Fungsi Keterangan
P2 Data DB0 s/d DB7 LCD Output
P3.6 RS (register select) LCD Output
P3.7 E (enable clock) LCD Output
P1.5 Tombol Timer 10 detik Input
P1.6 Tombol Timer 20 detik Input
P1.7 Tombol Start Input
P3.0 (RxD) Komunikasi terima serial Input
P3.1 (TxD) Komunikasi kirim serial Output
P1.1 Kontrol RS-485 Output
5V 5V U1 AT89S51 9 18 19 29 30 31 1 2 3 4 5 6 7 8 10 11 12 13 14 15 16 17 39 38 37 36 35 34 33 32 21 22 23 24 25 26 27 28 RST XTAL2 XTAL1 PSEN ALE EA/VPP P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7 P3.0 P3.1 P3.2 P3.3 P3.4 P3.5 P3.6 P3.7 P0.0 P0.1 P0.2 P0.3 P0.4 P0.5 P0.6 P0.7 P2.0 P2.1 P2.2 P2.3 P2.4 P2.5 P2.6 P2.7 RST Q1 12MHz Tombol Start C3 30pF C2 30pF U2 LCD 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 GND VCC VO RS R/W E D0 D1 D2 D3 D4 D5 D6 D7 AND KTD R1 10K C4 10uF
Timer 10 detik Timer 20 detik TXD
RXD
CONTROL RS-485
3.2.1.2 Rangkaian reset.
Reset digunakan untuk mengembalikan keseluruhan sistem (program) ke
awal. Reset terjadi dengan adanya logika 1 selama minimal 2 cycle (2μ detik)
pada kaki reset (pin 9) berdasarkan datasheet [1]. Pada perancangan, waktu
pengosongan dipilih sebesar 100 ms dengan asumsi waktu reset telah lebih dari 2
µs, sesuai dengan persamaan 2.2. Bila nilai hambatannya (R) dipilih 10 kΩ, maka
nilai C adalah:
100 .10-3 = 10.000 x C
C = 10 µF
3.2.1.3 Rangkaian Osilator.
Osilator on-chip digunakan sebagai sumber detak (clock) ke
mikrokontroler. Penentuan Osilator yang digunakan dapat berpengaruh dalam
penggunaan baud rate untuk kecepatan data dalam komunikasi serial. Dalam
perancangan ini resonator kristal yang digunakan adalah kristal 11,0592 MHz,
karena dengan kristal ini detak limpahan yang diperoleh berupa bilangan
konstanta bulat. Hal ini lain jika menggunakan kristal 12 MHz, yang harus
dilakukan pembulatan sehingga akan mempengaruhi ralat pada kecepatan baud
ratenya.
Waktu instruksi timer 1 di detak dengan laju 12 MHz 11,0592
yaitu sebesar
921600 Hz atau 921,6 kHz. Pada persamaan 2.1 timer melimpah dengan laju
limpahan sebesar 32 x baud rate. Untuk perancangan ini, baud rate kecepatan
serial yang digunakan adalah 9600 bps, maka laju limpahan timer 1 dapat
kali/detik 307200
1 Limpahan Laju
9600 32 1 Limpahan Laju
= × = timer timer
Limpahan timer1 dengan kristal 11,0592 MHz membutuhkan perulangan sebesar:
kali 3 ulang isi
307200 921600 ulang
isi
1 Limpahan Laju
Instruksi Waktu
ulang isi
= = =
timer
3.2.1.4 Tombol Start dan Tombol Timer
Pinsip kerja piranti tombol start dan tombol timer yang digunakan adalah
tombol yang bersifat momentary, yaitu saat tombol ditekan maka kondisinya
terhubung dan sebaliknya kondisinya terputus saat tombol dilepas atau tidak
ditekan. Tombol tersebut dihubungkan menjadi satu pertanahan (Common
ground). Pada saat sistem dihubungkan dengan catu daya, isi dari tiap port
Mikrokontroler yang digunakan adalah FFh atau dalam keadaan logika ‘1’. Bila
salah satu tombol ditekan, maka salah satu pin akan terhubung dengan ground dan
mendapatkan masukan dengan logika ‘0’. Antarmuka untuk tombol start dan
tombol timer dapat dilihat pada gambar 3.3.
Pengaktifan tombol start dilakukan setelah menekan salah satu tombol
timer yang akan digunakan sebagai lama waktu dalam pemilihannya.
3.2.1.5 Rangkaian Penampil LCD (Liquid Cristal Display).
Penampil yang digunakan adalah LCD dengan tipe dot matrik 16x2
keluaran seico, sehingga LCD ini memiliki 2 baris dengan kemampuan
untuk menampilkan daftar pilihan suara A, B, C, D, E, F (Abstain), sedangkan
baris kedua digunakan untuk hasil akhir jumlah perhitungan tiap pilihan suara
tersebut Gambar 3.4 memperlihatkan desain penampilan dari LCD yang
digunakan.
A B C D E F
Jumlah Tiap-tiap Pilihan
Gambar 3.4.Tampilan pada LCD 2 x 16.
Untuk pembuatan antarmuka antara LCD dan mikrokontroler AT89S51
dapat dilihat pada gambar 3.3 menggunakan metode pengalamatan 8-bit data.
Jalur data DB0 s/d DB7 dari LCD HD44780 dihubungkan dengan Port 2 pada
mikrokontroler AT89S51. Penggunaan LCD diatur pin EN, RS dan R/W pada
LCD, maka perlu dilakukan pengaturan melalui mikrokontroler. Pin RS (register
select) dihubungkan pin P3.6. Pin E (enable clock) dihubungkan pin P3.7. LCD
hanya difungsikan dalam kondisi tulis, jadi pada LCD kaki R/W selalu dalam
kondisi low (dihubungkan dengan ground).
3.2.1
Rangkaian
Slave
3.2.2.1 Konstruksi Rangkaian slave
Perancangan untuk rangkaian slave ini, Control unit yang digunakan
adalah Mikrokontroler AT89S51, berfungsi untuk menentukan dan menghitung
hasil penekanan tombol suara yang berasal dari tiga balloting unit dan hasil
perhitungan pilihannya tersebut akan dikirimkan kepada rangkaian master.
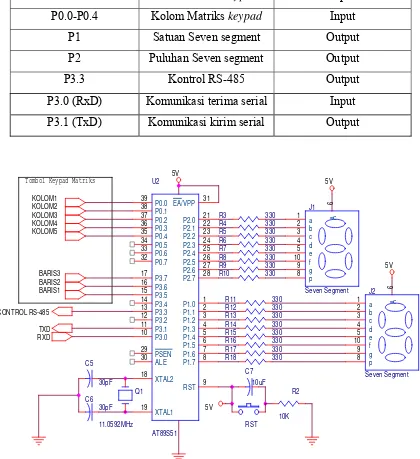
Penggunaan terminal port yang dipakai dapat dilihat pada tabel 3.2, sedangkan
untuk antarmuka rangkaian mikrokontroler slave ditunjukkan pada gambar 3.5.
Tabel 3.2. Penggunaan port pada mikrokontroler slave.
Port Fungsi Keterangan
P3.5-P3.7 Baris Matriks keypad Input
P0.0-P0.4 Kolom Matriks keypad Input
P1 Satuan Seven segment Output
P2 Puluhan Seven segment Output
P3.3 Kontrol RS-485 Output
P3.0 (RxD) Komunikasi terima serial Input
P3.1 (TxD) Komunikasi kirim serial Output
C5 30pF R4 330 KOLOM4 R17 330 RST R10 330 BARIS3 RXD R13 330 J1 Seven Segment 1 2 3 4 5 10 9 8 6 a b c d e f g p A BARIS2 R7 330
Tombol Keypad Matriks
R18 330 R14 330 R9 330 R6 330 U2 AT89S51 9 18 19 29 30 5V 31 8 7 6 5 4 3 2 1 10 11 12 13 14 15 16 17 39 38 37 36 35 34 33 32 21 22 23 24 25 26 27 28 RST XTAL2 XTAL1 PSEN ALE EA/VPP P1.7 P1.6 P1.5 P1.4 P1.3 P1.2 P1.1 P1.0 P3.0 P3.1 P3.2 P3.3 P3.4 P3.5 P3.6 P3.7 P0.0 P0.1 P0.2 P0.3 P0.4 P0.5 P0.6 P0.7 P2.0 P2.1 P2.2 P2.3 P2.4 P2.5 P2.6 P2.7 R11 330 KOLOM2 R15 330 TXD C7 10uF 5V KOLOM1 KOLOM5 J2 Seven Segment 1 2 3 4 5 10 9 8 6 a b c d e f g p A KOLOM3 R5 330 CONTROL RS-485 C6 30pF 5V 5V R8 330 BARIS1 Q1 11.0592MHz R12 330 R2 10K R3 330 R16 330
3.2.2.2 Rangkaian Osilator dan Rangkaian Reset.
Konfigurasi yang digunakan untuk rangkaian reset dan rangkaian osilator
pada mikrokontroler slave ini sama dengan konfigurasi yang digunakan pada
mikrokontroler master. Hal ini dibutuhkan untuk sinkronisasi dalam komunikasi
serial agar kecepatan baudrate yang digunakan sama.
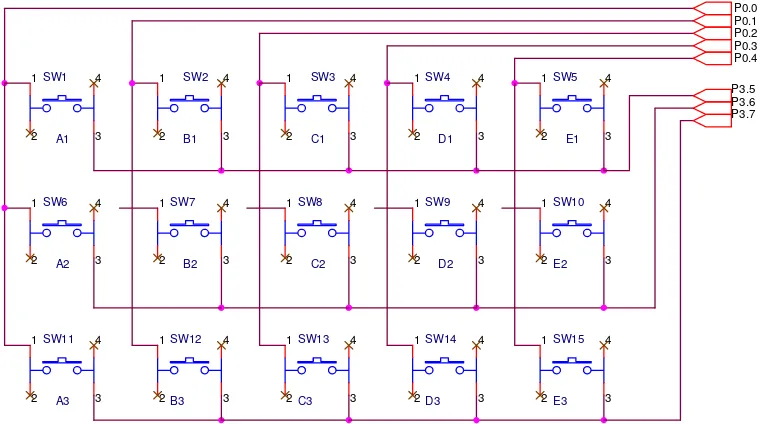
3.2.2.3 Rangkaian Masukan Tombol
Rangkaian masukan tombol suara menggunakan konfigurasi matriks keypad
yang bertujuan untuk menghemat jumlah port yang digunakan pada mikrokontroler.
Konfigurasi yang digunakan adalah matriks keypad 3 x 5 yang artinya terdiri dari 3
baris dan 5 kolom. Matriks keypad ini tersusun dari 15 tombol, apabila tidak
menggunakan konfigurasi matriks keypad maka dibutuhkan 15 port sedangkan
dengan matriks keypad hanya menggunakan 8 port.
Antarmuka matriks keypad ini dihubungkan dengan port 0 dan port 3
mikrokontroler AT89S51, untuk barisnya terhubung dengan jalur P3.5, P3.6, dan P3.7
yang berfungsi sebagai keluaran. Sedangkan kolomnya terhubung dengan jalur P0.0
sampai P0.4. yang berfungsi sebagai masukan mikrokontroler. Konfigurasi rangkaian
matriks keypad dapat dilihat pada gambar 3.6.
Pengecekan pada matriks keypad adalah dengan sistem pengecekan secara
berurutan (scanning) yaitu pengecekan baris dan kolom secara bergantian. Untuk
mengecek salah satu tombol yang ditekan, maka terlebih dahulu tiap baris diberi
logika ‘0’, kemudian dilakukan pengecekan tiap kolom. Apabila salah satu kolom
bernilai ‘0’ hal ini menandakan tombol ada yang sedang ditekan. Kombinasi baris
SW8 C2 1 4 2 3 SW11 A3 1 4 2 3 SW12 B3 1 4 2 3 SW13 C3 1 4 2 3 SW7 B2 1 4 2 3 SW1 A1 1 4 2 3 SW2 B1 1 4 2 3 P3.6 P3.5 P0.0 SW10 E2 1 4 2 3 SW15 E3 1 4 2 3 SW9 D2 1 4 2 3 SW3 C1 1 4 2 3 P0.4 P0.1 SW4 D1 1 4 2 3 SW6 A2 1 4 2 3 P0.2 SW5 E1 1 4 2 3 P3.7 SW14 D3 1 4 2 3 P0.3
Gambar 3.6. Rangkaian matriks keypad 3 x 5.
Tabel 3.3. Kombinasi baris dan kolom matriks keypad.
Tombol
Pilihan P3.7 P3.6 P3.5 P0.0 P0.1 P0.2 P0.3 P0.4
A1 0 1 1 0 1 1 1 1
B1 0 1 1 1 0 1 1 1
C1 0 1 1 1 1 0 1 1
D1 0 1 1 1 1 1 0 1
E1 0 1 1 1 1 1 1 0
A2 1 0 1 0 1 1 1 1
B2 1 0 1 1 0 1 1 1
C2 1 0 1 1 1 0 1 1
D2 1 0 1 1 1 1 0 1
E2 1 0 1 1 1 1 1 0
A3 1 1 0 0 1 1 1 1
B3 1 1 0 1 0 1 1 1
C3 1 1 0 1 1 0 1 1
D3 1 1 0 1 1 1 0 1
3.2.2.4 Penampil waktu pemilihan
Dalam proses pengambilan suara untuk pemilihan tombol suara terdapat batas
waktu yang telah ditentukan saat awal menjalankan mesin voting elektronik ini yaitu
timer 10 detik atau 20 detik. Berdasarkan batas waktu tersebut jika pemilih belum
melakukan penekanan dari salah satu tombol suara pada balloting unit maka
pilihannya akan dianggap abstain. Penampil yang digunakan sebagai indikator
pewaktu menggunakan dua digit seven segment yang bekerja secara countdown
(mencacah turun) setiap detiknya.
Prinsip kerja dari seven segment menyerupai kerja LED common anoda,
struktur pin LED seven segment dapat dilihat pada gambar 3.7 artinya untuk
menghidupkan atau menyalakannya diperlukan logika ‘0’ pada port mikrokontroler.
Untuk daftar susunan angka heksa penampilan seven segment berdasarkan struktur
pin-pin LED seven segment dapat dilihat pada tabel 3.4.
Tabel 3.4 Daftar heksa dari tampilan angka pada seven segment.
Desimal h g f e d c b a Heksa
0 1 0 0 0 0 0 1 0 82
1 1 0 1 1 1 0 1 1 BB
2 1 0 0 0 0 1 0 1 85
3 1 0 0 1 0 0 0 1 91
4 1 0 1 1 1 0 0 0 B8
5 1 1 0 1 0 0 0 0 D0
6 1 1 0 0 0 0 0 0 C0
7 1 0 0 1 1 0 1 1 9B
8 1 0 0 0 0 0 0 0 80
Gambar 3.7. Pin Seven segment
Pada gambar 3.5 terdapat antarmuka mikrokontroler dengan seven segment,
digit waktu untuk puluhan ditampilkan melalui port 1 sedangkan digit waktu untuk
satuan ditampilkan melalui port 2. Nilai resistor yang digunakan dapat dicari
berdasarkan arus yang mengalir pada pin LED seven segment tersebut yaitu:
R V VCC − LED
ILED =
Sehingga,
LED LED CC
I V
V −
R =
Diketahui nilai VCC = 5 V, VLED adalah 1.4 V dan ILED dapat menyala
sebesar 11 mA, maka dari persamaan (2.1) didapat nilai R :
3 10 11
4 . 1 5
−
− x
R = = 327,3 Ω
Nilai R yang digunakan adalah nilai R yang terdapat di pasaran, yaitu 330 Ω.
3.3 Komunikasi Serial
Pada perancangan “Mesin Voting Elektronik” menggunakan empat buah
Mikrokontroler AT89S51. Sebuah mikrokontroler sebagai master yang difungsikan untuk
menerima data yang dikirimkan dari tiga buah mikrokontroler slave. Tiap-tiap
digunakan komunikasi serial standar RS-485, yang mendukung untuk komunikasi data
secara bidirectional atau point to multipoint. Selain itu standar komunikasi ini memiliki
beberapa kelebihan, yaitu dapat digunakan untuk menghubungkan 32 unit peralatan
elektronik sekaligus tanpa memerlukan referensi ground yang sama dan juga lebih tahan
terhadap noise untuk penggunaan pada jarak yang cukup jauh (1,2 Km).
3.3.1 IC Komunikasi Serial RS-485.
Komponen utama yang digunakan pada komunikasi serial standar RS-485
pada perancangan ini adalah SN75176 yang merupakan seri 7517x buatan Texas
Instrument. Data yang ditranmisikan oleh IC ini dikirim dalam bentuk perbedaan
tegangan yang ada pada pin A (Do/Ri) dan B dari SN75176. Pada gambar 3.
8 memperlihatkan konfigurasi IC SN75176 yang memiliki 8 pin. (Teknik antarmuka
RS-485)[3] .
(Do/Ri)
Gambar 3.8 IC SN75176.
SN75176 berfungsi sebagai pengirim atau penerima data tergantung dari
kondisi kaki-kaki kontrolnya yaitu DE dan .. Apabila DE dan berlogika ‘0’,
maka SN75176 berfungsi sebagai penerima data sedangkan bila kaki DE dan RE
berlogika ‘1’ maka SN75176 berfungsi sebagai pengirim data. Gambar 3.9
memperlihatkan rangkaian sistem komunikasi RS-485 yang digunakan. RE RE
Gambar 3. 9 Rangkaian sistem komunikasi RS-485.
3.3.2. Konfigurasi Jaringan
Sistem yang akan dibuat menggunakan konfigurasi jaringan multidrop 2 kabel
karena komunikasi RS-485 memiliki kemampuan tiga keadaan (tristate) (RS-422 And
RS-485 Application Note halaman 6), yaitu mengeluarkan sinyal, menerima sinyal
dan keadaan terbuka (high impedance) maka dapat dikonfigurasikan untuk
komunikasi half-duplex. Jadi setiap mikrokontroler dari masing-masing rangkaian
slave dapat mengirimkan data serial secara bergantian. Gambar 3.10 memperlihatkan
rangkaian RS-485 dengan konfigurasi multidrop 2 kabel.
3.3.3. Komponen Penyesuai Impedansi
Agar sinyal data yang dikeluarkan dari masing-masing mikrokontroler slave
dapat diterima dengan sempurna oleh mikrokontroler master dan tidak terjadi
feedback maka diperlukan penyesuai impedansi pada jaringan (RS-422 And RS-485
Application Note halaman 18). Penyesuai impedansi yang digunakan pada rangkaian
ini yaitu sistem parallel termination seperti gambar 3.11. Parallel termination yaitu
memasangkan resistor secara paralel pada kabel jaringan. Nilai resistansi dari resistor
ini disesuaikan dengan impedansi nominal kabel jaringan yang digunakan yaitu
100Ω.
Gambar 3. 11 Komponen penyesuai impedansi.
3.3.4. Pemberian Prasikap pada Jaringan
Pemberian prasikap tegangan pada jaringan baik prasikap positif maupun
prasikap negatif dimaksudkan untuk menghindari keadaan sinyal yang tidak menentu saat
tidak ada data (keadaan menunggu / idle). Pemberian prasikap ini dengan cara
memasangkan resistor prasikap antara line B dengan ground dan resistor antara line A
dengan VC Sistem komunikasi yang akan dirancang memiliki konfigurasi :
1. Memiliki 2 resistor penyesuai impedansi 100Ω, yang akan dipasangkan paralel
2. Impedansi tiap rangkaian komunikasi RS-485 sebesar 12KΩ baik untuk pengirim
maupun penerima (RS-422 And RS-485 Application Note halaman 18).
3. Direncanakan ada 4 rangkaian komunikasi serial RS-485 (sebuah penerima dan 3
buah pengirim).
4. Suplai tegangan 5V dengan amplitudo sinyal minimal +200mV(422 And
RS-485 Application Note halaman 3).
5. Maka besar nilai nilai resistansi prasikap dihitung sebagai berikut:
- Jumlah beban keseluruhan 4 rangkaian, masing-masing nilai impedansinya
12KΩ dan dirangkai secara paralel sehingga jumlah beban adalah
3 3 2 1 1 1 1 1 1 R R R R
Rbeban = + + +
3 3 3 3 10 12 1 10 12 1 10 12 1 100 12 1 1 × + × + × + × = beban R 3 10 12 4 1 × = beban R Ω = K
Rbeban 3
- Jumlah beban dirangkai paralel dengan 2 resistor penyesuai impeda