W. Somayasa
Mathematics Department of Haluoleo University, Kendari email: [email protected]
Abstract
In this paper we propose Efron residual based-bootstrap approximation methods in asymptotic model-checks for homoschedastic spatial linear regression models. It is shown that under some regularity conditions given to the known regression functions the bootstrap version of the sequence of least squares residual partial sums processes converges in distribution to a centred Gaussian process having sample paths in the space of continuous functions on
I
:
0
,
1
0
,
1
. Thus, Efron residual based-bootstrap is a consistent approximation in the usual sense. The finite sample performance of the bootstrap level Kolmogorov-Smirnov (KS) type test is also investigated by means of Monte Carlo simulation.Key words: residual based-bootstrap, asymptotic model-check, homoschedastic spatial linear regression models, partial sums, Gaussian process.
I. Introduction
Practically the correctness of the assumed linear models is usually evaluated by analysing the
cumulative sums (CUSUM) of the least squares residuals. To this end a huge amount of literature is available, see among others MacNeill (1978) or Bischoff and Miller (2000) for one dimensional
context. In the spatial context we refer the reader to MacNeill and Jandhyala (1993) and Xie and MacNeill (2006).
To see the above mentioned problem in more detail let us consider an experiment performed
on an experimental region
I
:
0
,
1
0
,
1
undern
2 experimental conditions taken from a regular lattice, given byI
n
k
,
1
:
)
n
/
k
,
n
/
(
:
n
,n
1
. (1)Accordingly, we put together the observations carried out in n in an
n
n
matrix nn n
, n
1 , 1 k k n
n
:
Y
Y
, where for1
,
k
n
,Y
k is the observation at the point)
n
/
k
,
n
/
(
, and n n is the space ofn
n
real matrices furnished with the Euclidean innerproduct
A
,
B
n n:
trace
(
A
tB
)
and the corresponding norm given by)
A
A
(
trace
A
n n t , forA
,
B
n n. It is worth noting that for our model we takeI
as theexperimental region without loss of generality instead of any compact subset of 2. For any
I
:
f
, letf
(
n)
:
f
(
/
n
,
k
/
n
)
kn,n1, 1 n n, then we haveY
n ng
(
n)
E
n n,Model-Checks For Homoschedastic Spatial Linear Regression Model Based On Bootstrap Method
n , n
1 , 1 k k n
n
:
E
is the corresponding matrix of independent and identically distributed randomerrors having mean zero and variance 2
(
0
,
)
, for1
,
k
n
. We are interested in testingthe hypotheses
n n 0
:
g
(
)
W
H
vs.K
:
g
(
n)
W
n,n
1
, (2)where
W
n:
f
1(
n),
,
f
p(
n)
n n is a sub space of n n generated byf
1(
n)
,
,)
(
f
p n .Under
H
0, the matrix of least squares residuals is given byn n n W n n n W n
n
:
pr
Y
pr
E
R
(Stapleton, 1995), wheren W
pr
is the orthogonal projector ontothe orthogonal complement of
W
n. Without loss of the generality we assume throughout this workthat
f
1(
n)
,
,f
p(
n)
is an orthogonal basis ofW
n. Hence, by the elementary linear algebra we get underH
0,p
1
i i n i n
n i n
n n i n
n n n
n n n n
)
(
f
),
(
f
)
(
f
E
),
(
f
E
:
R
. (3)Equivalently by the
vec
operator, we have
vec
(
R
n n)
vec
(
E
n n)
X
n(
X
tnX
n)
1X
tnvec
(
E
n n)
,where
X
n is the design matrix of the model underH
0, i.e., ann
2p
matrix whosek
th columnis given by the
n
2 dimensional vectorvec
(
f
k(
n))
,k
1
,
,
p
. A consistent estimator for 2is given by
p
n
R
:
ˆ
22 n n 2 n
n n
in the sense
ˆ
n2 converges in probability to 2, asn
.Suppose that the regression functions
f
1,
,f
p are linearly independent and squared integrable on I with respect to the Lebesgue measure I, then underH
0, MacNeill and Jandhyala(1993) and Xie and MacNeill (2006) showed that
)
(
B
)
))(
R
(
vec
(
T
n n n D fn
1 in
C
I
, asn
,where for
(
t
,
s
)
I
,) R (
I 2 1
s , 0 t , 0
I t 2
f
(
t
,
s
)
:
B
(
t
,
s
)
f
d
G
fdB
B
, (4)and
T
n:
n2C
(
I
)
is the partial sums operator defined in Park (1971). Herep p p
, p
1 , 1 k I I
k
f
d
f
:
G
,
B
2 is the standard Brownian sheet having sample pats inC
I
and ) R (
If
t
n is a realisation of the Kolmogorov-Smirnov (KS) statistics)
n
/
k
,
n
/
))(
R
(
vec
(
T
n
1
max
:
KS
n n nn k , 0 f ,
n
, then a level test of KS type based on residualpartial sums processes for testing (2) will reject
H
0 if and only ift
nc
1 , wherec
1 is a constant that satisfies the equationn n n 1
n k , 0 0
H
T
(
vec
(
R
))(
/
n
,
k
/
n
)
c
n
1
max
P
.
Hence, by the continuous mapping theorem (Billingsley, 1968, p. 29-30),
c
1 can be approximated by means of the distribution ofsup
B
f(
t
,
s
)
1 s , t 0
.
As it is presented in (4), the limiting distribution of the KS type statistics under
H
0 is notmathematically tractable, because it depends on the structure of the designs and the regression functions. Therefore the application of the preceding tests procedure is limited. It is the purpose of
the preceding paper to investigate the performance of bootstrap test of (2). Although the application of the bootstrap appears naturally in the present context, to the knowledge of the author this topic
has not found much attention in the literature. One purpose of the present paper is to demonstrate that Efron residual based-bootstrap (Shao and Tu, 1995) provides simple and reliable alternative for
constructing asymptotic critical region of such a KS type test. This will be discussed in the Section 2. In Section 3 we develop Monte Carlo simulation in investigating the finite sample characteristics of
the bootstrap test. An application of the developed method to a real data will be presented in Section 4. Finally we close the paper in Section 5 presenting conclusion and some remarks for future
researches.
II. Bootstrap Approximation
Let
r
kbe the component of the residual matrix in thek
th row and
thcolumn computed based on the original observationsY
n n underH
0,1
,
k
n
. We define ann
n
matrix ofcentred residuals
R
ˆ
n n:
r
kr
kn,n1, 1, wheren
1 k n
1 k 2 n
1
r
:
r
. Further, let Rˆ
F
be theempirical distribution function of the components of
R
ˆ
n n putting mass 2 n1 to
r
r
k , for
n
k
,
1
, i.e., forx
, n1 k
n
1 ,x k
2 n
1
Rˆ
(
x
)
:
1
(
r
r
)
F
, where
1
A is the indicator functionof
A
. Efron residual based-bootstrap defines the bootstrap observations by* n n n n
, n
1 , 1 k *
k *
n
n
:
Y
g
(
)
E
Y
,where
E
*n n:
*k nk,n1,1 is a random matrix whose components are a random sample fromF
Rˆand
)
(
g
n p1
i i n i n n n
n i n n n n n i
)
(
f
),
(
f
)
(
f
Y
),
(
f
Model-Checks For Homoschedastic Spatial Linear Regression Model Based On Bootstrap Method
is the ordinary least squares estimator of
g
(
n)
underH
0. LetE
* andvar
* be the expectation and variance operators conditioned onRˆ
F
. Then by the construction it is clear thatE
*(
*k)
0
and 2 n2 2
n p 2 n * k * 2 *
n
:
var
(
)
ˆ
(
r
)
ˆ
which clearly converges in probability to2
by the
famous weak law of large number and Slutsky’s theorem.
The bootstrap analogous of the residual partial sums process is given by
T
(
vec
(
R
))(
)
ˆ
n
1
* n n n * n)
))(
E
(
vec
X
)
X
X
(
X
)
E
(
vec
(
T
ˆ
n
1
* n n t n 1 n t n n * n n n * n. (6)
Hence, the bootstrap version of the KS type statistics can be represented by
T
(
vec
(
R
))(
/
n
,
k
/
n
)
ˆ
n
1
max
:
KS
* n *n nn n k , 0 * f , n
. (7)
Theorem 1
Suppose that the regression functions
f
1,
,f
p are linearly independent in the space of squared integrable functions with respect to I, denoted byL
2(
I)
, continuous and have bounded variation on I. Then underH
0 it holds,
T
(
vec
(
R
))(
)
ˆ
n
1
* n n n * n)
(
B
f Din
C
I
, asn
.Proof
For any rectangle
A
:
t
1
,
t
2
s
1
,
s
2
I
,2
t
1
t
,s
1
s
2
and any real-valued functionf
onI
, the increment off
over A is defined by)
2
s
,
2
t
(
f
:
f
I
-f
(
t
2
,
s
1
)
f
(
t
1
,
s
2
)
f
(
t
1
,
s
1
)
.Further, for a fixed natural number n, let us define operators
U
n:
C
(
I
)
n2 and)
I
(
C
)
I
(
C
:
O
n , such that for anyu
C
(
I
)
and(
t
,
s
)
I
, n , n 1 , 1 k k I n(
u
)
:
vec
u
U
, (8)
)
s
,
t
(
)
u
(
U
X
)
X
X
(
X
)
u
(
U
T
:
)
s
,
t
)(
u
(
O
n n n n tn n 1 tn n , (9)where
I
k:
(
1
)
/
n
,
/
n
(
k
1
)
/
n
,
k
/
n
,1
,
k
n
. It is obvious thatO
n is linear bythe linearity of
T
n. Moreover, since for everya
n2,U
n(
T
n(
a
))
a
, it follows thatO
n is idempotent. It can also be shown by the expression)
s
,
t
))(
u
(
U
(
T
)
s
,
t
)(
u
(
O
n n np
1
i i n i n
n i n n n i
))
(
f
(
vec
)),
(
f
(
vec
)
s
,
t
)))(
(
f
(
vec
(
T
)
u
(
U
)),
(
f
(
vec
,by the definition of norm of a operator on Banach space (Conway, 1985, p. 70), that
p 1 i 2 i 1 s , t 0 2 i
n
13
1
4
f
inf
f
(
t
,
s
)
Thus,
O
n is uniformly bounded onC
(
I
)
. This will directly imply to the continuity ofO
nonC
(
I
)
,where
.
is the supremum norm. Let us define an operatorO
:
C
(
I
)
C
(
I
)
, such that for every)
I
(
C
u
and(
t
,
s
)
I
,) R (
I 1
s , 0 t , 0
I t s
, 0 t ,
0
u
f
d
G
fdu
:
)
s
,
t
)(
u
(
O
.The right hand side of (9) also can be written by
)
s
,
t
(
)
u
(
U
T
:
)
s
,
t
)(
u
(
O
n n n)
u
(
U
X
X
X
n
1
X
n
1
n t n n t n 2 n t
ns nt
2 ,
where nt ns n2is the vector whose first
nt
ns
components are one and the reminder is zero. By the definition and by the continuity ofu
, we have
T
U
(
u
)
(
t
,
s
)
0,t 0,su
n n
n ,
(
t
,
s
)
I
. (10)Furthermore, since for
i
1
,
,
p
,f
i is bounded on I, then it holds component wisen t
ns nt
2
X
n
1
s , 0 t 0,
I p s
, 0 t , 0
I 1 n
d
f
,
,
d
f
. (11)The convergence component wise
1
n t n 2
X
X
n
1
11 p , p
1 j , 1 i I
I j i n
G
d
f
f
, (12)follows from the fact that the mapping
B
B
1 is continuous on the space of invertible matrices. Further, since fori
1
,
,
p
,f
i has bounded variation andu
is continuous on I, the Riemann-Stieltjes integral off
i with respect to u exists for all i. Consequently, we have the following convergence component wise)
u
(
U
X
tn n) R (
I p )
R (
I 1 n
du
f
,
,
du
f
. (13)Thus, from (10), (11), (12) and (13) , for every
u
C
(
I
)
, it holdsO
n(
u
)
O
(
u
)
n0
.Next let
(
u
n)
n 1 be any sequence inC
(
I
)
such thatu
nu
n0
, then sinceO
nis bounded onC
(
I
)
, we finally have)
u
(
O
)
u
(
O
0
n n
O
nu
nu
O
n(
u
)
O
(
u
)
n0
.The last result shows that the only subset of
C
(
I
)
that satisfies the condition there exists asequence
(
u
n)
n 1 that converges to u inC
(
I
)
, but the sequence(
O
n(
u
n))
n 1 does not converge toO
(
u
)
is an empty set. Hence, by Theorem 5.5 in Billingsley (1968) and Theorem 4 in ParkModel-Checks For Homoschedastic Spatial Linear Regression Model Based On Bootstrap Method
T
vec
(
E
)
ˆ
n
1
O
)
R
(
vec
T
ˆ
n
1
*n n n
* n n *
n n n
* n
)
B
(
O
2D
, as
n
.The proof of the theorem is complete since
B
2(
t
,
s
)
0
, almost surely ift
0
ors
0
. Corollary 1By the continuous mapping theorem, under
H
0 we haveKS
Sup
B
f(
t
,
s
)
1 s , t 0 D *
f ,
n , as
n
.Hence, for
(
0
,
1
)
, the constantc
1 defined in page 4 can now be approximated by theconstant
c
1* that satisfies the equationP
*KS
*n,fc
1* . Ift
n is a realisation ofKS
n,f,then an asymptotic level KS type test will reject
H
0 ift
nc
1* . We will illustrate in Section 4 the finite sample properties of this approach by means of simulation study.Remark 3.
The extension of Theorem 1 to the case of
p
3
dimensional unit cube and experimentaldesign
n
1n
2
n
p regular lattice withn
in
j, fori
j
is straightforward.III. Simulation
We develop Monte Carlo simulation for constructing the finite sample sizes critical region of
the bootstrap level test of the hypotheses
W
g
:
H
0 vs.K
:
g
W
'
, (15)where
W
:
f
1,
f
2,
f
3 andW
'
:
f
1,
f
2,
f
3,
f
4,
f
5,
f
6 ,f
1,
f
2,f
3,f
4,f
5,f
6:
I
, defined byf
1(
t
,
s
)
:
1
,f
2(
t
,
s
)
:
t
,f
3(
t
,
s
)
:
s
,f
4(
t
,
s
)
:
t
2,f
5(
t
,
s
)
:
ts
, andf
6(
t
,
s
)
:
s
2. The simulation is developed according to the following algorithm.Begin Algorithm
Step 1: Generate
n
n
matrix of pseudo random errorsE
n nfrom a distribution having mean zero and variance 2.Step 2: Compute the least squares residuals by the equation
)
E
(
vec
X
)
X
X
(
X
)
E
(
vec
)
R
(
vec
n n n n n tn n 1 tn n n .Step 3: Generate
n
n
matrix of bootstrap errorsE
*n nby sampling with replacement from thecentred residuals.
Step 4: Compute the bootstrap residuals by the equation
)
E
(
vec
X
)
X
X
(
X
)
E
(
vec
)
R
(
vec
*n n n* n n nt n 1 nt *n n .Step 5: Compute
ˆ
*n andKS
*n,f.Step 6: Repeat Step 1 to Step 5 M times.
Step 7: Compute
c
*1 : sort M values ofKS
*n,fobtained in Step 5 in ascending order, i.e., )2 *(
f , n ) 1 *(
f ,
n
KS
KS
*(M)f , n
then
Ν
α)
-(1
M
if
;
KS
Ν
α)
-(1
M
if
;
KS
c
1) α) (1 *(M
f n,
α)) (1 *(M
f n, *
1 ,
where
N
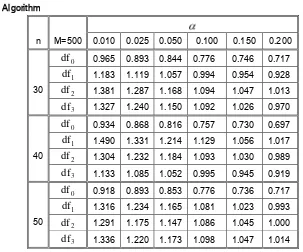
is the set of natural numbers. End Algorithmn M=500 0.010 0.025 0.050 0.100 0.150 0.200
30 0
df
0.965 0.893 0.844 0.776 0.746 0.7171
df
1.183 1.119 1.057 0.994 0.954 0.9282
df
1.381 1.287 1.168 1.094 1.047 1.0133
df
1.327 1.240 1.150 1.092 1.026 0.97040 0
df
0.934 0.868 0.816 0.757 0.730 0.6971
df
1.490 1.331 1.214 1.129 1.056 1.0172
df
1.304 1.232 1.184 1.093 1.030 0.9893
df
1.133 1.085 1.052 0.995 0.945 0.91950 0
df
0.918 0.893 0.853 0.776 0.736 0.7171
df
1.316 1.234 1.165 1.081 1.023 0.9932
df
1.291 1.175 1.147 1.086 1.045 1.0003
[image:7.516.73.376.155.407.2]df
1.336 1.220 1.173 1.098 1.047 1.014 Table 1. Simulated rejection probabilities of the Kolmogorov-Smirnov bootstrap test.For the simulation, we generate the error variables from i.i.d. random variables having mean zero and variance 0.5. Four cases are considered, that is for
1
,
k
n
,k
~
N
(
0
,
0
.
5
)
and k~
24
,1
,
2
,
3
.The simulation results are depicted in Table 1 for the sample sizes
n
30
,
40,
50
and 60 and level 1%, 2.5%, 5%,10
%
, 15%, and 20% with 500 replications. The entries in the row nameddf
0 are simulation results for which the errors are generated fromN
(
0
,
0
.
5
)
, whereas those in therows named
df
are generated from chi-square distribution having1
,
2
,
3
degrees of freedom such thatE
(
k)
0
andvar(
k)
0
.
5
, for1
,
k
n
. We note that for the simulation the generation of the random errors are restricted neither to a specific family of distributions nor to the distribution having variance 0.5 only. The variance as well as the family of the distribution may varyas long as they satisfy the conditions specified in Theorem 1. IV. Example
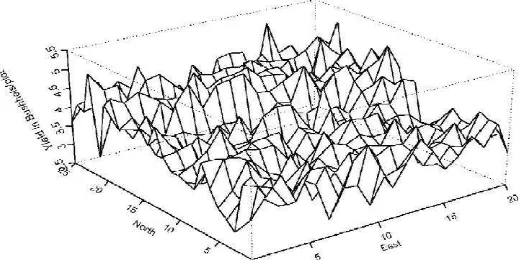
As an example we consider the wheat-yield data (Mercer and Hall’s data) presented in Cressie (1993), p. 454-455. The data are yield of grain (in pounds) observed over a 25 x 20 lattice of
Model-Checks For Homoschedastic Spatial Linear Regression Model Based On Bootstrap Method
The experiment consists of giving the 500 plots the same treatment (presumably fertilizer, water,
etc.), from which it can be identified that the data are a realization of 500 independent random variables. As was informed in Cressie (1993), the plots are assumed to be equally spaced with the
dimension of each plot being 10.82 ft by 8.05 ft. Figure 2 presents the perspective plot of the data. Observing Figure 2, we postulate under
H
0 a first order polynomial model as in Hypothesis(16). Since the variance is unknown, we use a consistent estimator
ˆ
nm2 . Calculated underH
0, thedata give
ˆ
nm2 = 0.1898, where3
nm
)
(
f
),
(
f
)
(
f
Y
),
(
f
Y
ˆ
2
m n 3
1
i i nm i nm n m
nm i m n m n nm i m n
2
nm ,
20
k
1
,
25
1
:
)
20
/
k
,
25
/
(
nm
. The functionsf
1,
f
2, andf
3 are defined as in Section 4. After computation, we get the critical value of the KS type test 1.5919, so bootstrap approximation of the p-value of the test computed by simulation is given byˆ
= 0.0001. Thus it can [image:8.516.127.387.322.453.2]be concluded that
H
0 is rejected for all suitable values of .Figure 2. The perspective plot of Mercer and Hall’s data
V. Concluding Remark
Efron residual based-bootstrap approximation to the KS type statistics based on least squares residual partial sums processes of homoschedastic spatial linear regression model is consistent. In
the forthcoming paper we shall investigate the application of Efron as well as wild bootstrap in the case of heteroschedastic spatial linear regression model.
The experimental design considered so far is restricted to the regular lattice on the unit square I, since the prerequisite condition of the theory is satisfied well. In practice this situation is
sometimes not reasonable, therefore we need to develop the theory in more general setting. VI. References
2. Bischoff, W. and Miller, F., 2000, Asymptotically Optimal Tests and Optimal Designs for Testing the Mean in Regression Models with Application to Change-Point Problems, Ann.
Inst. Statist. Math. Vol. 52, 658-679.
3. Conway, J.B., 1985, A Course in Functional Analysis, Springer-Verlag New York Inc., New York.
4. Cressie, Noel A. C., 1993, Statistics for Spatial Data, Revised Edition, John Wiley & Sons, Inc, New York, Singapore, Toronto.
5. MacNeill, I.B., 1978, Properties of Sequences of Partial Sums of Polynomial Regression Residuals with Applications to Tests for Change of Regression at Unknown Times,
Ann. Statist. Vol. 6, 422-433.
6. MacNeill, I.B. and Jandhyala, V.K., 1993, Change Point Methods for Spatial Data, Multivariate Environmental Statistics, eds. by G.P. Patil and C.R. Rao, Elsevier Science
Publishers B.V., 298-306.
7. Park, W.J., 1971, Weak Convergence of Probability Measures on the Function Space
)
1
,
0
(
C
2 , J. of Multivariate Analysis. Vol. 1, 433-444.8. Shao, J. and Tu, D., 1995, The Jackknife and Bootstrap, Springer-Verlag, New York.
9. Stapleton, J. H., 1995, Linear Statistical Model, John Wiley & Sons Inc, New York, Toronto,
Singapore.
10. Xie, L. and MacNeill, I.B., 2006, Spatial Residual Processes and Boundary Detection, South