415
Analisis dan Perancangan untuk Mengetahui Besaran Daya yang Dihasilkan pada Pengereman Regeneratif
Dharu Danendra
1, Sonki Prasetya
1*, P.Jannus
11Program Studi Teknik Konversi Energi, Jurusan Teknik Mesin, Politeknik Negeri Jakarta, Jl. Prof. G. A. Siwabessy, Kampus UI, Depok, 16425
Abstrak
Pada saat kendaraan melakukan pengereman konvensional, energi kinetik berubah menjadi panas untuk memperlambat kendaraan atau menghentikannya. Banyak energi yang hilang karena berubah menjadi panas dan terbuang percuma. Salah satu cara untuk mengatasi hal tersebut adalah dengan pengereman regeneratif.
Dengan sistem pengereman regeneratif, kendaraan listrik dapat memulihkan energi yang mengubah energi kinetik dari roda menjadi energi listrik, sehingga akan memanfaatkan energi yang terbuang. Hal ini dapat dilakukan oleh motor yang mengubah energi kinetik menjadi listrik (generator) yang nantinya bisa disimpan di dalam baterai. Studi ini dilakukan untuk membuktikan bahwa adanya energi balik pada saat kendaraan melakukan deselerasi. Perancangan dilakukan untuk mengetahui besaran daya yang dihasilkan pada sistem pengereman regeneratif. Parameter yang digunakan adalah daya keluaran keluaran motor brushles DC. Hasil dari penelitian ini memaparkan bahwa pada kecepatan 35 km/h dan kondisi jalan pada kemiringan 9,53°
menghasilkan daya yang paling besar. Hasil ini membuktikan bahwa kecepatan dan kondisi jalan menentukan nilai optimal sistem pengereman regeneratif pada kendaraan listrik. Adanya energi daya yang dihasilkan membuktikan bahwa sistem pengereman regeneratif dapat dimanfaatkan sebagai penghematan pada kendaraan listrik.
Kata-kata kunci : regeneratif, pengereman, kendaraan listrik
Abstract
When the vehicle applies conventional braking, the kinetic energy is converted into heat to slow down the vehicle or stop it. A lot of energy is lost because it turns into heat and is wasted. One way to overcome this is with regenerative braking. With a regenerative braking system, electric vehicles can recover energy that converts the kinetic energy of the wheels into electrical energy, so that it will utilize the wasted energy. This can be done by a motor that converts kinetic energy into electricity (generator) which can later be stored in the battery. This study was conducted to prove that there is reverse energy when the vehicle decelerates. The design is carried out to determine the amount of power generated in the regenerative braking system. The parameter used is the output power of the DC brushless motor. The results of this study show that at a speed of 35 km/h and road conditions at a slope of 9.53° it produces the greatest power. These results prove that the speed and road conditions determine the optimal value of the regenerative braking system on electric vehicles.
The existence of the energy produced proves that the regenerative braking system can be used as a saving on electric vehicles.
Key word : regenerative, braking, electric vehicle
* Corresponding author E-mail address: sonki.prastya@mesin.pnj.ac.id
416
PENDAHULUAN
Kendaraan listrik sebagai kendaraan ramah lingkungan memiliki banyak kelebihan jika dibandingkan dengan kendaraan berbahan bakar minyak selain tidak menghasilkan polusi, efisien, dan biaya operasi yang murah, juga tidak bising[1]. Namun masih banyak orang yang kurang tertarik untuk memiliki kendaraan listrik, karena waktu pengisian kendaraan listrik yang tergolong lama, tempat pengisian bahan bakar yang masih terbatas, harga yang mahal, dan jarak tempuh yang dapat dijangkau oleh kendaraan listrik masih tergolong rendah[1].
Pada suatu kendaraan, sistem pengreman merupakan salah satu sistem terpenting. Pengereman berfungsi untuk memperlambat atau bahkan menghentikan kendaraan. Pada sistem pengereman mekanik, sebagian besar energi terbuang akibat gesekan antara kampas rem dengan roda. Salah satu studi yang berfokus pada pengereman menunjukkan bahwa sistem pengereman pada bus mengkonsumsi 370 Wh/Km dari konsumsi energi total 37 kWh/Km atau 10% dari energi konsumsi total [2]. Permasalahan energi terbuang ini menjadi permasalahan penting terutama pada mobil listrik. Energi yang terbuang ini sebenarnya dapat dikonversi menjadi energi yang berguna terutama untuk mobil listrik.
Energi terbuang ini dapat dimanfaatkan dengan sistem pengereman regeneratif. Pengereman regeneratif adalah pemulihan energi melalui operasi generator motor penggerak kendaraan listrik, yang memungkinkan untuk mendapatkan kembali sebagian energi kinetik sebagai energi listrik. Pada kecepatan tertentu, energi kinetik karena massa dan bagian yang berputar dari kendaraan energinya dapat diarahkan ke pengisian baterai, capasitor ataupun flywheel saat aksi pengereman diterapkan. Selain itu, sistem ini menciptakan efek pengereman yang tepat terutama pada kecepatan yang lebih tinggi dan meningkatkan efisiensi secara keseluruhan.
oleh karena itu penulis ingin membuat penelitian mengenai perancangan pengereman regeneratif. tujuan dari penelitian ini unutk mengetahui bagaimana cara membuat perancangan pengereman regeneratif untuk mengetahui besaran daya yang dihasilkan dan juga untuk mengetahui karakteristik besaran daya yang dihasilakan pada kondisi jalan pada kendaraan listrik.
KAJIAN TEORI
Regenerative Braking
Regenerative brake adalah suatu sistem pengereman yang mampu menyerap energi saat pengereman untuk dimanfaatkan sebagai penghematan energi. Pada metode pengereman regeneratif yang akan diusulkan oleh penulis, bertujuan untuk mengurangi konversi energi kinetik menjadi energi panas, gaya pengereman akan ditambah menggunakan gaya yang bukan berasal dari gesekan antara kanvas rem dan piringan cakram, tetap gaya pengereman berasal dari torsi pembebanan dan inersia generator DC. Gaya pengeraman akan memutar rotor generator DC yang sebelumnya motor dc tersebut bekerja memutar roda dan nantinya hasil dari generator DC tersebut akan digunakan untuk menghasilkan energi listrik yang akan disimpan kembali ke baterai. Besarnya energi yang mampu disimpan dipengaruhi oleh seberapa besar perlambatan yang terjadi pada kendaraan. Penggunaan regenerative brake pada kendaraan bermanfaat untuk dapat mengurangi konsumsi bahan bakar tersebut.
kendaraan listrik dengan massa total m yang bergerak dengan kecepatan V akan memiliki energi dan momentum menurut persamaan dibawah ini :
P = mv (2.1)
Ek = ½ Mv2 (2.2)
Dari persamaan 2.2 tersebut terlihat bahwa v atau kecepatan sangat berpengaruh terhadap peningkatan energi kinetik pada sebuah kendaraan, sehingga efek pengereman regeneratif lebih tampak ketika kendaraan tersebut melaju dengan kecepatan tinggi dibandingkan dengan kecepatan rendah. Pada mobil listrik,efisiensi kendaraan umumnya hanya sekitar 20%, dengan 80% sisa energi habis dikonversi menjadi panas ketika dilakukan pengereman [3]. Torka mekanik dari putaran roda sepeda akan disalurkan ke generator atau dinamo DC untuk diubah kembali menjadi energi listrik, dan sebagian torka lagi disalurkan ke kampas rem yang diubah menjadi energi panas [3].
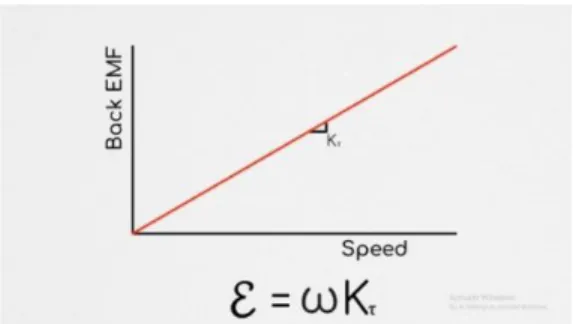
kunci dari mengkonversi energi mekanik menjadi energi elektrik adalah Back EMF yang dihasilkan oleh putaran motor. Back EMF adalah tegangan potensial yang dihasilkan dari kumparan motor yang berputar pada medan magnetnya dan nilainya sama dengan konstanta torsi motor dikalikan dengan kecepatan sudutnya.Terlihat pada gambar 1 grafik nilai Back EMF dengan kecepatan.
417
gambar 1 grafik Back EMF terhadap Kecepatan
Motor Bruhsless DC (BLDC)
BLDC Motor merupakan motor listrik synchronous 3 fasa atau biasa disebut motor BLAC. Perbedaan pemberian nama terjadi karena BLDC memiliki BEMF berbentuk trapezoid sedangkan BLAC memiliki BEMF berbentuk sinusoidal. Walaupun demikian keduanya memiliki struktur yang sama dan dapat dikendalikan dengan metode six step ataupun metode PWM sinusoidal. Motor BLDC memiliki biaya perawatan yang rendah dibandingkan dengan motor dc. Kecepatan motor BLDC pun lebih tinggi karena tidak menggunakan brush. Selain itu motor bldc memiliki efisiensi yang lebih tinggi karena rotor dan torsi awal lebih tinggi karena rotor terbuat dari magnet permanen.walaupun begitu motor BLDC juga memiliki kekeurangan seperti pengendalian BLDC yang jauh lebih rumit untuk mengatur kecepatan dan torsi yang konstan karena tidak adanya brush yang menunjang proses komutasi selain itu harga BLDC pun juga jauh lebih mahal.
Pada motor DC konvensional, sikat dan komutator mekanik digunakan dalam proses komutasi. Sedangkan motor BLDC sudah menggunakan teknologi elektronik dalam proses komutasinya, yaitu sensor Hall dan kontroler[4]. Motor bruhsless memerlukan 3 buah sensor hall atau encoder agar bisa menentukan timing komutasi yang tepat sehingga didapatkan torsi dan kecepatan yang konstan. timing komutasi ditentukan dengan cara mendeteksi medan magnet rotor dengan menggunakan 3 buah sensor hall untuk mendapatkan 6 kombinasi timing yang berbeda. gambar 2 terlihat cara kerja motor bldc.
gambar 2 Cara kerja motor BLDC[4]
Torsi (Momen Gaya)
Pada umumnya torsi (torque) adalah gaya yang digunakan untuk menggerakan suatu bedan dengan arah dan jarak tertentu. Untuk menghitung besar torsi dapat menggunakan persamaan 2.3 [5].
𝜏 = 𝐹𝑡𝑜𝑡𝑎𝑙 × 𝑅𝑟𝑜𝑑𝑎 (2.3)
Keterangan:
τ = torsi [Nm]
F = gaya [N]
418 Rroda = jari-jari roda sepeda [m]
Hubungan torsi (Torque) terhadap daya (power) pada sebuah motor listrik dapat terlihat pada persamaan (2.4) dan (2.5):
𝑃 = 𝜔 ∙ 𝜏 (2.4)
ω = 2𝜋 ×𝑛60 (2.5)
Dari persamaan (2.4) dapat disimpulkan bahwa torsi dan kecepatan putaran yang bernilai besar dapat mengakibatkan besarnya daya yang dihasilkan.
Hambatan Gaya pada Kendaraan
Pada saat kendaraan bergerak memiliki beberapa faktor yang mempengaruhi kestabilan saat berkendara. Untuk itu penting mengetahui perhitungan yang hambatan pada kendaraan agar berjalan stabil.
Keterangan :
Fg = Gaya Hambatan Gravitasi Fa = Gaya Hambatan Aerodinamis Fr = Gaya Hambatan Gelinding Hambatan Gravitasi
Hambatan gravitasi ada gaya yang menahan gerakan diakibatkan gaya gravitasi. Hambatan gravitasi tidak bernilai saat benda bergerak di jalan mendatar. Hambatan gravitasi akan bernilai jika benda melewati jalan menanjak/menurun dikarenakan adanya sudut kemiringan dari jalan tersebut. Besarnya hambatan ravitasi ditentuakan oleh rumus (2.7).[6]
Keterangan ;
Fg = Hambatan Gravitasi [N]
M = massa total kendaraan [kg]
g = gaya gravitasi
𝑠𝑖𝑛∅ = Sudut kemiringan pada track menurun (°) Hambatan Aerodinamis
Hambatan aerodinamis merupakan salah satu hambatan bagi setiap kendaraan. Hambatan aerodinamis (Aerodynamic Drag) adalah besaran dimensi yang digunakan untuk mengukur drag atau hambatan dari obyek kendaraan dalam lingkungan fluida seperti udara atau air. Hal ini digunakan dalam persaman hambatan, dimana hambatan aerodinamis yang lebih kecil dibuktikan dengan koefisien hambatan yang rendah. Koefisien hambatan dipengaruhi oleh beberapa variable salah satunya luas permukaan dari bidang tertentu, kecepatan benda tersebut, kecepatan angin serta massa jenis udara yang merupakan fluida angin disini. Rumusan hambatan aerodinamis ditunjukkan oleh rumus (2.8) sebagai berikut. [5]
keterangan ;
Fa = aerodynamic drag [N]
ρ = massa jenis udara [kg/m3] = 1.202 kg/m3
∑ 𝐹𝑇𝑜𝑡𝑎𝑙= 𝐹𝑔 + 𝐹𝑎 + 𝐹𝑟 (2.6)
𝐹𝑔 = 𝑚𝑔 𝑠𝑖𝑛∅ (2.7)
𝐹𝑎= 1
2𝜌𝐴𝐶𝑑(𝑉1+ 𝑉2)2 (2.8)
419 A =LuasPermukaan[m2]=0.511
(Luas Penampang kendaraan pada sepeda + pengendara)
Cd = coefficient drag = 1,1 v1 = bike velocity [m/s]
v2 = wind velocity [m/s]
Hambatan Gelinding
Tahanan/hambatan gelinding (Rolling Resistance) adalah gaya yang menahan gerakan saat benda berguling di permukaan.. Besarnya tahanan gelinding kedua roda pada track mendatar ditentukan oleh rumus (2.9) sebagai berikut : [5]
𝐹𝑟= 𝐶𝑟 𝑚𝑔 𝑐𝑜𝑠∅ (2.9)
Keterangan :
Fr = rolling resistance [N]
µ = koefisien gesek tumpuan
= (0.015: 0.02) (Permukaan Licin : Permukaan Kasar) N = berat sepeda [N]
M = massa total sepeda [kg]
g = gaya gravitasi
METODE PENELITIAN
Pada metode penelitian tahap pertama penulis melakukan pencarian dan pengumpulan berbagai referensi untuk menunjang penyelesaian tugas akhir ini. Referensi didapatkan dari buku, jurnal ilmiah, artikel ilmiah, dan internet.
Setelah melakukan berbagai pencarian penulis mengumpulkan data-data terkait penelitian. Setelah itu perancangan alat lalu melakukan pengujian, setalah didapatkan hasil pengujian akan dilakukan analisa, hasil dan analisa akan ditulis menjadi laporan penelitian.
Perancangan pengujian alat
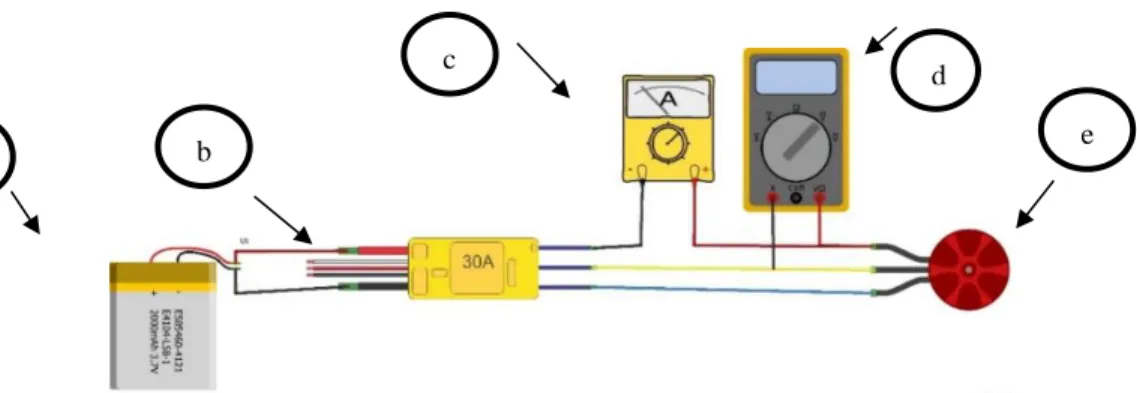
Pada perancangan pengujian alat menggunakan motor Brushless DC 24volt -350 watt pada kendaraan Sepeda listrik. Sebelum pengujian dilakukan perancangan pemsangan voltmeter dan clamp ampere sebagai alat untuk mengukur arus dan tegangan yang akan diamati pada hasil pembahasan saat proses pengereman regeneratif berlangsung. Model rancangan pengujian dapat dilihat pada gambar 4.
Gambar 4 Rancangan Pengujian Alat II
c
b e
d
a
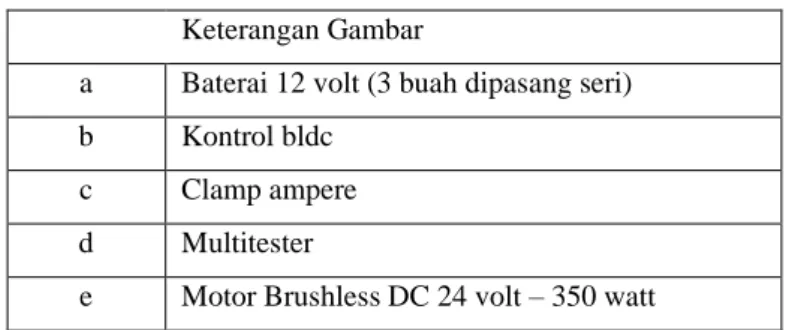
420 Untuk mengetahui keterangan dari gambar 4 dapat dilihat pada tabel 1.
Tabel 1 Keterangan gambar pengujian II
Keterangan Gambar
a Baterai 12 volt (3 buah dipasang seri) b Kontrol bldc
c Clamp ampere d Multitester
e Motor Brushless DC 24 volt – 350 watt
Berikut ini dijelaskan juga spesifikasi peralatan yang akan digunakan pada pengujian perancangan sistem pengereman regeneratif :
a. Motor listrik Brushless DC 24 volt
Motor BLDC ini merupakan jenis motor Outrunner, kelebihan pada jenis motor ini memiliki karakteristik kecepatan yang tinggi, torsi rendah & efisiensi lebih tinggi ddibandingkan motor bldc jenis outrunner.
Tabel 2 menjelaskan spesifikasi motor brushless DC 24 volt
Tabel 2 Spesifikasi motor brushless DC 24 Volt
No Spesifikasi Besaran
1. Tegangan (V) 24 / 36Volt
2. Daya (W) 250 Watt
3. Diameter (mm) 270 mm
4. Berat (kg) 3.6 Kg
5. Tire Size 14” x 2.125/2.5
6. Speed ± 25 – 35 km/jam
b. Baterai
Baterai yang digunakan yaitu aki kering berujumlah 3 buah yang dirangkai secara seri dan masing masing aki memiliki spesifikasi 12V 9Ah. Baterai aki tersbut yang nantinya digunakan sebagai supply daya motor listrik. Pada tabel 3 menjelaskan spesifikasi aki yang digunakan pada sepeda listrik.
Tabel 3 Spesifikasi Baterai 12 Volt
No Spesifikasi Besaran
1 Tegangan 12 Volt
2 Daya (W) 9 Ah
3 Initial Current 2.7A
4 Berat (Kg) 3.1 Kg
5 Waktu Pemakaian 20 Hour
c. Aplikasi relive
Relive adalah sebuah aplikasi perekam aktivitas olahraga, mulai dari lari, bersepeda, hiking, dan masih banyak lagi. Pada penelitian ini penggunaan aplikasi relive ini digunakan untuk mengetahui kecepatan dan jarak pada saat kendaraan melaju. Aplikasi relive ini cukup akurat menggunakan gps dan internet. Ketika handphone bergerak sedikt kecepatan bisa langsung terbaca pada satuan km/h.
HASIL DAN PEMBAHASAN
Pada pengujian ini mengambil data dengan kondisi jalan yang berbeda. pengambilan data pada pengujian menggunakan motor brushless DC 24/36Volt-350 watt yang dihubungkan pada kendaraan sepeda listrik. Berat kendaraan sepeda listrik sebesar 38,39 Kg dan berat pengemudi sebesar 55kg. Total massa kendaraan dengan penumpang sebesar 93,39 Kg. Pengambilan data dilakukan yaitu dengan mengambil data pada jalan mendatar dan jalan menurun. Variasi kecepatan pada jalan mendatar mulai dari 15km/h, 25km/h, dan 35km/h. Untuk pengujian pada jalan menurun yaitu dengan deselerasi pada jalan menurun dengan variasi turunan 5,24°, 7,73° dan 9,53°.
421 Pengujian pada Jalan Mendatar
Pada pengujian ini diawali dengan menghitung analisa dinamika kendaraan sebagai hambatan pada laju kendaraan mendatar. Pengujian dilakukan dilakukan dengan cara mendorong kendaraan sepeda listrik menggunakan kendaraan konvensional. Pada saat kendaraan mencapai kecepatan yang diinginkan, kendaraan konvensional akan melepas dorongan dan selanjutnya terjadi deselerasi pada kendaraan listrik akan diamati besarnya arus dan tegangan saat kondisi tersebut.
Analisa Dinamika pada Laju Kendaraan Jalan Mendatar
Pada laju kendaraan mendatar nilai ∅ = 0, maka nilai 𝑚. 𝑔. 𝑠𝑖𝑛∅ = 0. Nilai massa sebesar 93,39 kg. Kecepatan kendaraan pada pengujian diambil pada 10,4 km/h atau 2,88 m/s. Pada kecepatan 2,88 m/s, kecepatan angin dihasilkan sangat kecil sehingga dapat diabaikan. Nilai 𝐶𝑟 sebesar 0,02 pada pengujian dilakukan pada permukaan kasar.
𝐹𝑡𝑜𝑡𝑎𝑙= 𝐶𝑟 𝑚𝑔 𝑐𝑜𝑠 0 +1
2 𝑐𝑑 𝜌 𝐴
(𝑉
1+ 𝑉
2)
2𝐹𝑡𝑜𝑡𝑎𝑙= 22,106 𝑁
Jari jari roda pada pengujian kendaraan sepeda listrik sebesar Rroda = 0,4356 m, maka bisa didapatkan nilai torsi sebagai berikut:
𝜏 = 𝐹𝑡𝑜𝑡𝑎𝑙 . 𝑅𝑟𝑜𝑑𝑎 𝜏 = 9,630 𝑁
Daya yang dihasilkan pada nilai torsi sebesar 9,630 N dan kecepatan pengujian sebesar 2,88 m/s atau 63,136 Rpm adalah sebagai berikut :
𝑃 = 𝜔 . 𝜏 𝑃 = 64,641 watt
Dari hasil perhitungan tersbut maka daya yang dihasilakn pada pengujian kecepatan 63,136 Rpm dan nilai torsi sebesar 9,630 N adalah sebesar 64,641 Watt. Pada hasil ini dapat dibuktikan besaran nilai daya berbanding lurus pada kecepatan dan torsi.
Hasil Dan Analisa Grafik Pengujian jalan mendatar
Dari hasil pengujian pada kecepatan 15km/h, 25km/h dan 35 km/h maka didapatkan hasil grafik perbandingan daya terhadap kecepatan pada gambar 5
Gambar 5 Grafik perbandingan daya terhadap kecepatan jalan mendatar
Pada gambar 5 dapat dilihat hasil pengujian pada grafik perbandingan nilai kecepatan 35 km/h didapatkan daya maksimal mencapai 47,6064 watt pada saat kecepatan kendaraan 31,3 km/h. Pada gambar 5 dapat disimpulkan bahwa besarnya nilai kecepatan kendaraan pada kondisi jalan mendatar saat melakukan deselerasi mengakibatkan nilai daya yang besar.
422 Pada kondisi ini juga dapat dibuktikan pada persamaan (2.4) besarnya nilai kecepatan sudut dan nilai torsi mengakibatkan besarnya daya yang dihasilkan. dikarenakan daya berbanding lurus dengan kecepatan dan torsi.
Pengujian pada jalan menurun
Pada pengujian ini diawali dengan menghitung sudut kemiringan pada kondisi jalan sebagai perhitungan analisis dinamika pada laju kendaraan. Pengujian pada jalan menurun dilakukan dengan awalan kecepatan 0, kemudian kendaraan sepeda listrik meluncur pada variasi jalanan menurun. Variasi jalanan menurun meliputi turunan 5,24°, 7,73° dan 9,53°. Hasil dari deselerasi pada laju kendaraan listrik yang menurun akan diamati besarnya arus dan tegangan yang dihasilkan pada proses tersebut.
Menentukan kemiringan pada jalan pengujian
Untuk mengetahui nilai sudut kemiringan pada kondisi jalan dapat diketahui dengan mancari ketinggian dan jarak pada jalan tersbut. Nilai pada jarak didaptakan melalui aplikasi handphone geotracker dan nilai pada ketinggian didapatkan melalui aplikasi pengukuran pada iphone. Berdasarkan rumus segitiga istimewa phytagoras didapatkan nilai pada sudut kemiringan pada tabel 4.
Tabel 4 sudut kemiringan lintasan
Kondisi jalan ketinggian (m)
jarak (m)
nilai sudut kemiringan
(°)
Turunan curam 4 24,14 9,53
Turunan sedang 1,52 m 11,3 m 7,73
Turunan kecil 4,4 48 m 5,24
Analisa hambatan pada laju kendaraan menurun
Pada perhitungan persamaan (ftotal) mengambil salah satu nilai kemiringan pada treck jalan kemiringan sebesar 9,53°. Nilai massa kendaraan dengan penumpang sebesar 93,39 kg. Kecepatan kendaraan pada pengujian diambil pada 7,776 km/h atau 2,16 m/s. pada kecepatan 2,16 m/s kecepatan angin dihasilkan sangat kecil sehingga dapat diabaikan. Nilai 𝐶𝑟 sebesar 0,02 pada pengujian dilakukan pada permukaan kasar.
𝐹𝑡𝑜𝑡𝑎𝑙= 𝑚𝑔 𝑠𝑖𝑛∅ + 𝐶𝑟 𝑚𝑔 𝑐𝑜𝑠∅ +1
2 𝑐𝑑𝜌 𝐴 𝑣2 𝐹𝑡𝑜𝑡𝑎𝑙 = 171,377 N
Jari jari roda pada pengujian kendaraan sepeda listrik sebesar Rroda = 0,4356 𝜏 = 𝐹𝑡𝑜𝑡𝑎𝑙 . 𝑅𝑟𝑜𝑑𝑎
𝜏 = 74,652 𝑁
Daya yang dihasilkan pada nilai torsi sebesar 74,652 N dan kecepatan pengujian sebesar 2,16 m/s atau 47,352 Rpm adalah sebagai berikut :
𝑃 = 𝜔 . 𝜏
𝑃 = 369,988 𝑊𝑎𝑡𝑡
Dari hasil perhitungan tersbut maka daya yang dihasilakn pada pengujian kecepatan 47,352 Rpm dan nilai torsi sebesar 74,652 adalah sebesar 369,988 Watt. Pada hasil ini dapat dibuktikan nilai torsi pada kondisi jalan menurun lebih besar dibanding pada kondisi jalan mendatar. Hal ini karena pada jalan menurun terdapat nilai sudut kemiringan yang mengakibatkan besarnya nilai torsi. besaran nilai daya berbanding lurus pada kecepatan dan nilai torsi.
423 Hasil dan Analisa Grafik Pengujian Kondisi Jalan Menurun
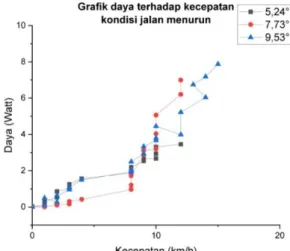
Dari hasil pengujian pada kondisi jalan menurun 5,24°, 7,73° dan 9,53°. maka didapatkan hasil grafik perbandingan daya terhadap kecepatan.
Gambar 4.6 grafik perbandingan daya terhadap kecepatan kondisi jalanan menurun
Pada gambar 6 dapat dilihat hasil pengujian pada grafik perbandingan nilai pada 9,53° didapatkan daya maksimal mencapai 7,8705 watt pada saat kecepatan kendaraan bernilai 14,3 km/h. Pada gambar 6 dapat disimpulkan bahwa besarnya nilai sudut kemiringan mengakibatkan besarnya daya yang dihasilkan.
Pada kondisi ini juga dapat dibuktikan pada persamaan (2.4) besarnya nilai kemiringan atau ∅ berpengaruh pada besarnya nilai gaya pada laju kendaraan. Besarnya gaya pada laju kendaraan mengakibatkan besarnya nilai torsi.
Dan besarnya nilai torsi mengakibatkan besarnya nilai daya yang didapat.
KESIMPULAN DAN SARAN
Kesimpulan
Data yang dilakukan ini merupakan data hasil uji coba. Berdasarkan hasil uji coba dan analisis yang telah dilakukan dapat disimpulkan sebagai berikut.
1. Perancangan sistem pengereman regeneratif ini dapat mengetahui besaran energi yang didapatkan pada saat kendaraan melakukan deselerasi atau perlambatan
2. pada pengujian ini didapat bahwa terdapat nilai arus balik di kendaraan sepeda listrik saat melakukan deselerasi. Hal Ini terjadi karena adanya energi kinetik pada ban yang terjadi ketika kendaraan melakukan pengereman atau memperlambat kendaraan. sebagian energi kinetik tersbut yang nantinya akan dikonversi menjadi energi listrik menggunakan generator dc yang sebelumnya adalah motor listrik dc.
Nantinya hasil dari energi yang didapat pada saat pengereman regeneratif bisa dimanfaatkan sebagai penghematan pada kendaraan listrik.
3. Besarnya energi yang dihasilkan pada pengereman regeneratif dipengaruhi oleh seberapa besar perlambatan yang terjadi. pada pengujian ini terlihat bahwa besarnya energi terjadi ketika kendaraan melakukan deselerasi pada kecepatan tinggi dan pada turunan yang curam. Hasil dari penelitian validasi alat memaparkan bahwa pada kecepatan 35 km/h dan kondisi jalan pada kemiringan 9,53° menghasilkan daya yang paling besar. Besarnya nilai daya pada saat kendaraan melakukan deselerasi bisa dimanfaatkan sebagai penghematan pada kendaraan listrik.
UCAPAN TERIMA KASIH
Penulis mengucapkan terima kasih atas Politeknik Negeri Jakarta atas dukungan finansialnya pada penelitian ini dan Jurusan Teknik Mesin dan Program Studi Teknik Konversi Energi atas dukungannya dalam keikutsertaan dalam kegiatan ilmiah ini.
424
REFERENSI
[1] S. Dhameja, Electric Vehicle Battery Systems. 2002.
[2] S. Prasetya, M. Adhitya, H. D. S. Budiono, and D. A. Sumarsono, “A investigation of braking system actuators for electric shuttle bus,” E3S Web Conf., vol. 67, pp. 4–7, 2018.
[3] J. Juni, R. P. Putra, I. Hajar, and C. Widyastuti, “Energi dan Kelistrikan : Jurnal Ilmiah Desain Sistem Pengereman Regeneratif Pada Sepeda Listrik Ringkas Energi dan Kelistrikan : Jurnal Ilmiah,” vol. 13, no.
1, pp. 11–19, 2021.
[4] Achmad Nur Husaini, “Prinsip Kerja Motor Brushless DC (BLDC Motor),” September 17, 2015, 2015.
[Online]. Available: https://www.insinyoer.com/prinsip-kerja-motor-brushless-dc-bldc-motor/3/.
[5] F. Inaswara, G. Pratiwi, H. Ramadhan, L. Khoirunnisa, and P. N. Jakarta, “MENGGUNAKAN PANEL SURYA SEBAGAI PENGISI,” 2016.
[6] Https://www.kompasiana.com/zainalabidinmustofa/552e5a206ea83487508b45ab/fisika-sederhana- sepeda, “No Title.”