NONSUBSAMPLED CONTOURLET TRANSFORM DAN
ITERATIVE POINT CORRESPONDENCE UNTUK REGISTRASI
PADA CITRA DENTAL PERIAPIKAL
Ahmad Afif Supianto, Agus Zainal Arifin, Arya Yudhi Wijaya
Jurusan Teknik Informatika, Fakultas Teknologi Informasi, ITS Kampus ITS Keputih - Sukolilo Surabaya 60111, Jawa Timur, Indonesia
email : [email protected], [email protected], [email protected]
ABSTRAK
Registrasi citra merupakan proses mencari transformasi yang optimal dari data citra yang berbeda ke dalam korespondensi spasial, sehingga struktur anatomi yang sama menempati lokasi spasial yang sama. Metode registrasi citra yang telah dikembangkan di bidang periodontal selama ini menggunakan domain spasial untuk menemukan titik-titik fitur.
Pada penelitian ini diusulkan registrasi citra menggunakan metode
Nonsubsampled Contourlet Transform dan Iterative Point Correspondence pada citra
dental periapikal. Metode diawali dengan proses ekstraksi fitur menggunakan
Nonsubsampled Contourlet Transform untuk menghasilkan fitur titik yang tangguh
yang dilakukan pada domain frekuensi. Iterative Point Correspondence dilakukan untuk menemukan titik-titik yang bersesuaian antara citra reference dan citra floating, dimana citra floating adalah citra reference yang mengalami transformasi geometri. Selanjutnya dilakukan transformasi geometri melalui estimasi yang didapatkan dari korespondensi titik-titik yang bersesuaian tersebut.
Uji coba dilakukan terhadap 8 citra grayscale dental periapikal. Kemudian dilakukan perhitungan akurasi dari registrasi dengan menghitung banyaknya jumlah piksel yang menempati struktur gigi terhadap citra. Dari hasil uji coba menunjukkan bahwa metode yang diusulkan berhasil melakukan registrasi citra dengan parameter
thresholding sebesar 4 dan ukuran window 3x3 pada ekstraksi fitur, dan penentuan
iterasi maksimum sebanyak 400 kali. Kemudian, metode yang diusulkan mampu melakukan registrasi dengan tingkat akurasi mencapai 95,78%.
Kata kunci: Registrasi Citra, Nonsubsampled Contourlet Transform, Iterative Point
Correspondence, Citra Dental Periapikal
PENDAHULUAN
Registrasi citra merupakan proses mencari transformasi yang optimal yang sejalan dari data citra yang berbeda ke dalam korespondensi spasial, sehingga struktur anatomi yang sama menempati lokasi spasial yang sama ()[1]. Penelitian registrasi dan subtraksi citra di bidang kedokteran, khususnya periodontal telah dikembangkan untuk melakukan evaluasi terhadap tulang alveolar, misalnya [2] yang telah melakukan evaluasi terapi periodontoal menggunakan metode subtraksi citra digital dan [3] yang melakukan deteksi perubahan-perubahan kecil dari tulang alveolar dengan mengevaluasi kesejajaran citra secara semi-otomatis dan melakukan koreksi terhadap perbedaan geometrik citra. Identifikasi struktur anatomi gigi yang dilanjutkan dengan koreksi geometrik citra telah diusulkan oleh [4] untuk melakukan perhitungan terhadap tinggi tulang alveolar dan [5] untuk meningkatkan akurasi pada proses registrasi citra.
Meskipun demikian, metode registrasi yang dikembangkan di bidang periodontal tersebut belum diimbangi dengan optimasi terhadap proses ekstraksi fitur. Salah satu
ISBN : 978-602-97491-3-7
C-32-2
penelitian yang mengembangkan proses ekstraksi fitur pada citra dental telah diusulkan oleh Markaki [6]. Markaki melakukan registrasi citra dengan menemukan titik-titik bersesuaian yang dilakukan secara iteratif dan melakukan ekstraki fitur menggunakan konsep disparity measure yang diusulkan oleh [7] untuk memberikan bobot pada setiap titik. Ekstraksi fitur dengan disparity measure tersebut bekerja pada domain spasial.
Dari uraian di atas, bisa diketahui bahwa registrasi citra yang dikembangkan di bidang periodontal masih dapat dioptimalkan dengan kemampuan ekstraksi fitur pada domain frekuensi. Di sisi lain, teknik penemuan titik-titik yang bersesuaian secara iteratif yang telah diajukan oleh [6] telah terbukti memberikan hasil yang cukup baik. Oleh karena itu, dalam penelitian ini diajukan suatu metode regisrasi citra yang melakukan proses ekstraksi fitur pada domain frekuensi dan proses pencocokan ftur secara iteratif. Ekstraksi fitur menggunakan Nonsubsampled Contourlet Transform (NSCT) yang diperkenalkan oleh [8] yang dikembangkan oleh [9] untuk menemukan fitur titik dalam proses registrasi citra. Sedangkan pencocokan fitur menggunakan algoritma iterative point correspondence (IPC) yang diusulkan oleh [6] untuk melakukan registrasi pada citra dental periapikal.
EKSTRAKSI FITUR DENGAN NSCT
Transformasi contourlet merupakan skema baru untuk dekomposisi gambar yang efisien yang menyediakan representasi resolusi spasial dan arah [10]. Transformasi contourlet menggunakan Laplacian pyramids untuk mendapatkan dekomposisi multiresolusi dan directional filter bank untuk menghasilkan dekomposisi arah, sehingga gambar direpresentasikan sebagai satu himpunan subband terarah diberbagai skala [11].
NSCT tidak hanya menyediakan analisa tentang multi resolusi, namun juga informasi geometri dan representasi arah, dan tidak berubah terhadap pergeseran sehingga setiap piksel dari hasil transformasi menempati piksel-piksel pada gambar referensi pada lokasi yang sama. Dengan sifat tersebut, informasi geometri piksel demi piksel didapatkan dari koefisien NSCT. Ekstraksi fitur yang diusulkan menggunakan model yang diusulkan oleh [9]. Algoritma ekstraksi fitur menggunakan NSCT dijelaskan sebagai berikut :
1. Menghitung koefisien NSCT dari citra reference sebanyak N level.
2. Setiap lokasi piksel, hitung maksimum magnitude pada semua subband yang diperoleh. Titik-titik tersebut disebut “maxima dari koefisien NSCT”.
3. Prosedur thresholding diterapkan pada citra NSCT maxima dengan tujuan untuk menghilangkan fitur titik yang tidak signifikan. Suatu titik disimpan sebagai fitur jika NSCT maxima > Th, Th dinyatakan dengan persamaan sebagai berikut:
𝑇ℎ = 𝑐(𝜎 + 𝜇)
dimana c adalah parameter yang ditentukan oleh user, σ dan μ masing-masing adalah standar deviasi dan rata-rata dari citra NSCT maxima.
4. Ambil setiap titik maxima sebagai titik pusat dari setiap blok neighbourhood dari ukuran window w x w dan temukan satu lokal maksimum pada setiap
neighbourhood, hal ini akan menghilangkan maxima yang saling berdekatan satu
sama lain.
5. Lokasi dari NSCT maxima yang diperoleh dan dithreshold diambil sebagai titik-titik hasil ekstraksi fitur.
PENCOCOKAN FITUR DENGAN IPC
Metode registrasi citra berdasar titik mempunyai asumsi bahwa titik yang bersesuaian pada citra reference dan citra floating akan dideteksi. Citra floating adalah
ISBN : 978-602-97491-3-7
C-32-3
citra reference yang mengalami transformasi geometri. Pasangan titik-titik
correspondence ini selanjutnya digunakan untuk proses estimasi parameter dari model
transformasi yang dipilih. Transformasi yang dimaksud adalah tansformasi geometri yang melibatkan proses translasi, rotasi, dan skala perbesaran.
Pemetaan titik fitur pada citra reference ke titik correspondence-nya pada citra
floating dilakukan melalui metode iteratif menggunakan algoritma Iterative Point Correspondence yang diusulkan oleh [6]. Algoritma dibagi kedalam 2 langkah utama,
yaitu inisialisasi dan melakukan proses update parameter transformasi sampai iterasi maksimum.
Sebelum dijelaskan tentang proses-proses yang terdapat pada IPC, terlebih dahulu akan dijelaskan tentang beberapa notasi yang digunakan dalam algoritma IPC. IR, IF masing-masing merupakan citra reference dan citra floating. Kemudian 𝜇𝐴(𝐼) adalah nilai pembatasan dari citra I pada area A dimana𝐴 ⊂ ℜ2 dan area T dimana 𝑇𝑤(𝐴) ⊂ ℜ2 merupakan transformasi dari area A dengan parameter 𝑤 = (𝑤1, 𝑤2, … , 𝑤𝑘), dimana k adalah jumlah parameter yang dibutuhkan untuk transfomasi T.
Tujuan dari langkah pertama adalah mencari nilai MoM (Measure of Match) awal. Nilai dicari dengan cara membandingkan area persegi pada citra reference dengan area hasil transformasi dari citra reference yang terletak pada citra floating dengan menggunakan persamaan berikut:
𝑀𝑜𝑀𝑖 = 𝑀𝑜𝑀(𝜇𝐴𝑖(0)(𝐼𝑅), 𝜇𝑇𝑤𝑖(𝐴𝑖(0))(𝐼𝐹))
Setiap titik-titik fitur pada citra reference dibuat area persegi menggunakan persamaan: 𝐴𝑖(𝑛) = [𝑥𝑖 − 𝑟(𝑛), 𝑥𝑖 + 𝑟(𝑛)] × [𝑦𝑖− 𝑟(𝑛), 𝑦𝑖+ 𝑟(𝑛)]
dimana r(n) = side length (bergantung pada nilai n). Nilai r(n) pada persamaan di atas berubah-ubah tergantung pada iterasi yang didapatkan dari persamaan :
𝑟(𝑛) = �𝑅𝑓+ (𝑅𝑖 − 𝑅𝑓) ∙ 𝑒−𝑐𝑟(𝑛/𝑛𝑚𝑎𝑥)�
dimana Ri adalah nilai awal dari side length dan Rf adalah nilai akhir dari side length, cr
adalah decay constant, nmax adalah jumlah iterasi maksimum, n adalah iterasi sekarang,
dan ⌊ ⌋ adalah fungsi floor.
Selanjutnya setiap piksel dalam area persegi pada citra reference ditransformasi ke citra floating dengan cara memetakan titik-titik fitur pada citra reference menggunakan persamaan :
𝑥′ = 𝑤
𝑖4cos 𝑤𝑖3(𝑥 − 𝑥𝑐) − 𝑤𝑖4sin 𝑤𝑖3(𝑦 − 𝑦𝑐) + 𝑤𝑖1+ 𝑥𝑐 𝑦′= 𝑤
𝑖4𝑠𝑖𝑛 𝑤𝑖3(𝑥 − 𝑥𝑐) − 𝑤𝑖4𝑐𝑜𝑠 𝑤𝑖3(𝑦 − 𝑦𝑐) + 𝑤𝑖2+ 𝑦𝑐
dimana x,y adalah koordinat piksel citra reference, x’,y’ adalah koordinat piksel hasil transformasi citra reference ke citra floating, w1 adalah parameter pergeseran
horizontal, w2 adalah parameter pergeseran vertical, w3 adalah parameter sudut rotasi,
dan w4 adalah parameter skala perbesaran.
Nilai w1, w2, w3, w4 adalah parameter yang digunakan untuk transformasi.
Untuk mendapatkan nilai MoM awal yaitu dengan cara membandingkan area persegi pada citra reference dengan area persegi pada citra floating untuk setiap titik menggunakan persamaan :
𝑀𝑜𝑀(𝐼𝑅, 𝐼𝐹) = �∑ (𝐼𝑥,𝑦 𝑅(𝑥,𝑦)−𝐼̂𝑅)(𝐼𝐹(𝑥,𝑦)−𝐼̂𝐹)� 2 ∑ (𝐼𝑥,𝑦 𝑅(𝑥,𝑦)−𝐼̂𝑅)2∑ (𝐼𝑥,𝑦 𝐹(𝑥,𝑦)−𝐼̂𝐹)2
dimana 𝐼̂𝑅 dan 𝐼̂𝐹 masing-masing adalah rata-rata nilai grayscale dari 𝐼𝑅 dan 𝐼𝐹.
Langkah kedua setelah mendapatkan nilai awal MoM adalah melakukan proses iterasi sampai iterasi maksimum. Pada langkah ini diawali dengan melakukan generate
random perturbation. Random perturbation dibuat pada setiap titik fitur dimana setiap
titik terdiri dari 4 nilai acak untuk mengisi keempat parameter yang dibutuhkan untuk proses transformasi, yaitu perturbation terhadap pergeseran horizontal, perturbation (2)
(3)
(4)
(5)
ISBN : 978-602-97491-3-7
C-32-4
terhadap pergeseran vertikal, perturbation terhadap sudut rotasi, dan perturbation terhadap skala perbesaran.
Selanjutnya, secara detail langkah-langkah untuk mendapatkan nilai MoM dan bobotnya dilakukan berdasarkan algoritma berikut:
1. Menghitung nilai MoM sekarang (MoMi(n)) untuk transformasi parameter baru
yang dihitung berdasarkan persamaan berikut :
𝑀𝑜𝑀𝑖(𝑛) = 𝑀𝑜𝑀�𝜇𝐴𝑖(𝑛)(𝐼𝑅), 𝜇𝑇𝑤𝑖+𝑑𝑤(𝑛)(𝐴𝑖(𝑛))(𝐼𝐹)�
2. Melakukan update vektor transformasi. Update vektor transformasi dilakukan pada setiap titik. Update vektor transformasi ini bergantung pada 2 faktor yaitu random
perturbation dari parameter transformasi dw(n) dan interaksi antara titik i dan
titik-titik tetangganya. Fungsi random yang digunakan menggunakan fungsi variabel acak berdistribusi normal yang didasarkan pada nilai mean dan standar deviasi. Adapun proses update transformasi dilakukan sesuai dengan persamaan :
𝑤𝑖(𝑛) = 𝑤𝑖+ 𝛼�𝑀𝑜𝑀𝑖(𝑛)�𝑑𝑤(𝑛) + �1 − 𝛼�𝑀𝑜𝑀𝑖(𝑛)�� 𝛽(𝑖, 𝑛)
dimana fungsi α adalah fungsi yang akan melakukan proses soft thresholding pada nilai MoM sekarang dan mempunyai bentuk sigmoid dan dinyatakan dengan persamaan berikut:
𝛼�𝑀𝑜𝑀𝑖(𝑛)� =1+𝑒−𝑠(𝑀𝑜𝑀𝑖(𝑛)−𝑐)1
s adalah nilai stepness area linear dari fungsi, dan c merupakan nilai dimana α(c) =
0.5.
Sedangkan fungsi β dinyatakan dengan persamaan berikut: 𝛽(𝑖, 𝑛) =∑𝑗∈𝐾(𝑖)𝑀𝑜𝑀𝑗ℎ(𝑖,𝑗)(𝑤𝑗−𝑤𝑖(𝑛))
∑𝑗∈𝐾(𝑖)𝑀𝑜𝑀𝑗ℎ(𝑖,𝑗)
ℎ(𝑖, 𝑗) = 𝑒−(�𝑃𝑖−𝑃𝑗�2�2𝜎2)
h(i,j) adalah fungsi Gaussian neighborhood dari titik i dengan standar deviasi σ
yang akan menentukan sejauh mana interaksi antara titik i dengan titik j. Dan K(i) =
{k ϵ {1,2,...,N} : ||Pi-Pj||<3σ dan MoMk > MoMi}.
Sebagaimana dijelaskan pada definisi K(i), penjumlahan pada persamaan (10) adalah sejauh titik j yang terletak dalam neighborhood titik i. Jarak yang dimiliki titik j adalah kurang dari 3σ dari titik i dan nilai MoM titik j lebih baik dari titik i, MoMk > MoMi. Jadi titik-titik yang terletak dekat dengan titik i dan memiliki nilai
MoM yang lebih baik dari titik i akan mempengaruhi vektor transformasi pada
iterasi sekarang.
3. Menghitung kembali nilai MoM untuk vektor transformasi yang telah diupdate seperti pada persamaan berikut :
𝑀𝑜𝑀𝑖(𝑛) = 𝑀𝑜𝑀(𝜇𝐴𝑖(𝑛)(𝐼𝑅), 𝜇𝑇𝑤𝑖(𝑛)(𝐴𝑖(𝑛))(𝐼𝐹))
4. Membandingkan dan menyimpan nilai MoM dan bobotnya. Apabila nilai MoM yang didapatkan sekarang lebih baik dari nilai MoM yang didapatkan pada iterasi sebelumnya, maka akan dilakukan proses update. Proses update dilakukan pada nilai MoM dan vektor transformasi tiap titik (w1,w2,w3,w4).
REGISTRASI CITRA MENGGUNAKAN MODEL TRANSFORMASI GEOMETRI
Pada radiografi gigi, lensa biasanya lebih kecil dari 1 mm2, yang memungkinkan pendekatan bahwa sinar X berasal dari sebuah titik sumber. Pasien dan sinar X dianggap memiliki posisi yang tetap namun sensor mungkin dirotasi dan ditranslasi pada semua arah dalam ruang 3 dimensi, tiap piksel (x,y) pada citra diperoleh sebelum pemindahan sensor, berubah menjadi posisi (x’,y’) setelah sensor.
(7) (8) (10) (11) (12) (9)
ISBN : 978-602-97491-3-7
C-32-5
Transformasi geometri ini dikenal sebagai proyeksi perspektif dan ditentukan oleh persamaan berikut:
𝑥′ =𝑎1𝑥+𝑎2𝑦+𝑎3
𝑎7𝑥+𝑎8𝑦+1 𝑑𝑎𝑛 𝑦
′=𝑎4𝑥+𝑎5𝑦+𝑎6 𝑎7𝑥+𝑎8𝑦+1
dimana parameter a1...a8 yang akan menentukan hasil proyeksi.
Koordinat–koordinat (x,y) dan (x’,y’) antara kedua citra radiografi gigi selanjutnya dapat digunakan untuk menentukan parameter dari proyeksi perspektif. Penentuan parameter tersebut dilakukan dengan memetakan beberapa korespondensi (x,y) dan (x’,y’) dari citra reference terhadap citra floating yang dideteksi oleh algoritma IPC. Nilai optimal dari parameter transformasi perspektif diperoleh menggunakan pendekatan least square.
HASIL
Pengambilan Data Sampel Gigi
Pengambilan data sampel gigi pada penelitian ini adalah citra dental periapikal dari 8 orang pasien yang sedang diterapi bone graft. Data diambil dari FKG Unair pada tahun 2009 dan 2010. Pasien terapi terdiri dari 4 pasien yang menderita periodontitis pada anterior (gigi bagian depan) dan 4 pasien yang menderita periodontitis pada posterior (gigi bagian belakang). Untuk setiap pasien diambil dua sampel data, yaitu data citra sebelum dilakukan terapi yang kemudian dijadikan sebagai citra reference dan data citra sesudah dilakukan terapi yang kemudian dijadikan sebagai citra floating.
Daerah yang diambil masing-masing merupakan area yang sedang diterapi dengan ukuran 256 piksel arah horizontal dan 256 piksel arah vertikal. Pengambilan area sampel yang dipilih dapat dilihat pada Gambar 1.
(a) (b) (c)
Gambar 1. Daerah Sampel. (A) Citra Dental Periapikal. (B) Citra Reference. (C) Citra
Floating.
Akan dilakukan transformasi geometri berupa translasi, rotasi, dan skala perbesaran pada setiap uji coba dengan faktor nilai yang sudah diketahui sebelumnya dan dijadikan sebagai ground truth. Selanjutnya dari ground truth tersebut akan di estimasi skala perbesaran, sudut rotasi, atau nilai translasi oleh metode yang digunakan pada setiap uji coba. Akurasi registrasi akan dihitung berdasarkan banyaknya jumlah piksel yang tidak menempati struktur gigi terhadap citra. Penentuan struktur gigi di dalam citra dilakukan oleh dokter gigi sebagai pakar tentang gigi dari FKG Unair.
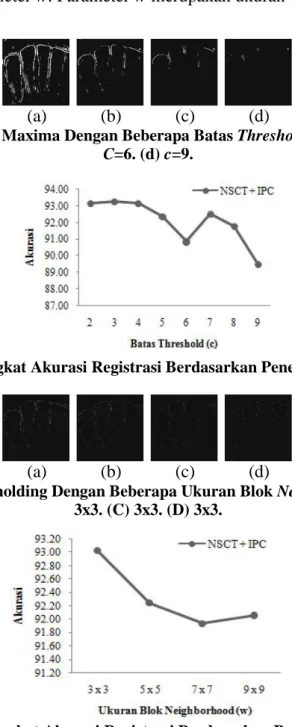
Penentuan Batas Threshold
Batas threshold dihitung dari rumus pada persamaan (1) yang melibatkan mean dan standart deviasi dari citra NSCT maxima. Tujuan pengujian pada penentuan batas
threshold adalah untuk menentukan nilai parameter c. Parameter c merupakan konstanta
yang ditentukan oleh seorang user. Setiap uji coba yang dilakukan akan didapatkan citra hasil thresholding berdasarkan batas thresholdnya. Kemudian, akan dipilih citra
thresholding yang baik, yaitu citra yang memiliki akurasi terbaik berdasarkan hasil dari
proses registrasi. Hasil citra thresholding dapat dilihat pada Gambar 2.
ISBN : 978-602-97491-3-7
C-32-6
Berdasarkan hasil percobaan pada Gambar 2, citra yang dijadikan acuan untuk tahap selanjutnya adalah Gambar 2(c). Hal itu ditunjukkan oleh akurasi yang didapatkan dari percobaan yang terlihat pada Gambar 3. Berdasarkan Gambar 3 tampak bahwa akurasi yang dihasilkan menurun ketika parameter c bernilai lebih dari 4. Semakin rendah nilai parameter c yang ditentukan, maka semakin banyak jumlah titik fitur yang dihasilkan yang menyebabkan waktu proses menjadi semakin lama. Oleh sebab itu, pada penelitian ini ditentukan nilai parameter c sebesar 4.
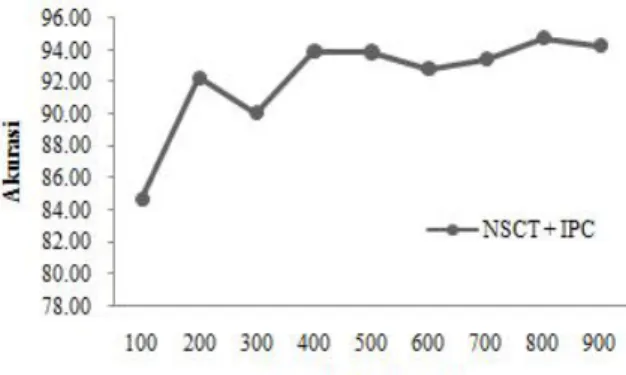
Penentuan Ukuran Window Neighborhood
Tujuan penentuan ukuran window neighborhood adalah untuk menghilangkan fitur titik yang saling berdekatan satu sama lain yang diperoleh berdasarkan jumlah piksel neighborhood dari titik fitur berupa ukuran blok n x n piksel ketetanggaan. Tujuan pengujian pada penentuan ukuran window neighborhood adalah untuk menentukan nilai parameter w. Parameter w merupakan ukuran window yang ditentukan oleh seorang user.
(a) (b) (c) (d)
Gambar 2. Citra NSCT Maxima Dengan Beberapa Batas Threshold. (A) C=2. (B) C=4. (C)
C=6. (d) c=9.
Gambar 3. Grafik Tingkat Akurasi Registrasi Berdasarkan Penentuan Batas Threshold.
(a) (b) (c) (d)
Gambar 4 Citra Thresholding Dengan Beberapa Ukuran Blok Neighborhood. (A) 3x3. (B) 3x3. (C) 3x3. (D) 3x3.
Gambar 5 Grafik Tingkat Akurasi Registrasi Berdasarkan Penentuan Ukuran Blok
ISBN : 978-602-97491-3-7
C-32-7
Hasil citra thresholding dengan beberapa ukruan window neighborhood dapat dilihat pada Gambar 4. Berdasarkan hasil percobaan pada Gambar 4, citra yang dijadikan acuan untuk tahap selanjutnya adalah Gambar 4(a). Hal itu ditunjukkan oleh akurasi yang didapatkan dari percobaan yang terlihat pada Gambar 5. Berdasarkan Gambar 5 tampak bahwa akurasi yang dihasilkan relatif menurun ketika parameter w berukuran lebih besar. Semakin tinggi nilai parameter w yang ditentukan, maka semakin berkurang jumlah titik fitur yang dihasilkan. Hal ini menyebabkan nilai akurasi relatif lebih rendah, maka pada peneitian ini ditentukan nilai parameter w dengan ukuran 3x3. Penentuan Iterasi Maksimum
Tujuan pada uji coba pada tahap ini adalah menentukan jumlah iterasi maksimum untuk menghasilkan nilai akurasi yang tinggi. Berdasarkan pada tahap uji coba sebelumnya bahwa telah didapatkan batas threshold yaitu parameter c bernilai 4 dan ukuran blok neighborhood yaitu parameter w sebesar 3x3. Batas threshold dan ukuran blok inilah yang akan digunakan untuk penentuan iterasi maksimum.
Uji coba ini dilakukan pada data citra yang telah dilakukan transformasi geometri dengan menggunakan parameter c = 4 dan parameter w berukuran 3x3. Hasil Uji coba dapat dilihat pada Gambar 6. Berdasarkan Gambar 6 tampak bahwa perolehan hasil akurasi stabil dimulai dari jumlah iterasi sebanyak 400 kali.
Gambar 6 Grafik Tingkat Akurasi Registrasi Berdasarkan Penentuan Iterasi Maksimum.
Registrasi Citra Menggunakan Metode NSCT dan IPC
Dalam melakukan uji coba pada penelitian ini, nilai parameter yang digunakan terhadap algoritma IPC mengacu pada nilai parameter yang digunakan oleh [6]. Parameter tersebut antara lain pada persamaan (4) yaitu nilai awal dan akhir dari
sidelength yang masing-masing bernilai 10 dan 30 dan decay constant bernilai 5. Pada
persamaan (9) yaitu variable s adalah 10 dan variable c adalah 0.5. Dan pada persamaan (11) yaitu niai standar deviasi sebesar 50.
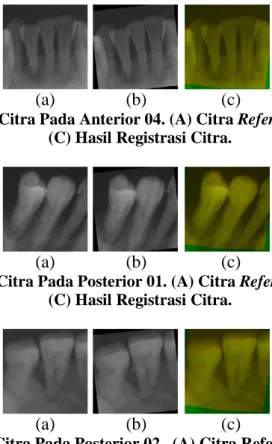
Dari hasil penelitian yang ditunjukkan pada Tabel 1. Penelitian yang telah dilakukan dengan melibatkan 8 data set, didapatkan hasil nilai akurasi tertinggi sebesar 95,78%. Hasil tersebut diperoleh pada gigi anterior ke-2. Dan nilai akurasi terendah sebesar 93,68% yang diperoleh dari proses yang dilakukan pada gigi posterior ke-1. Hasil registrasi citra secara visual dapat dilihat pada Gambar 7 sampai dengan Gambar 14.
ISBN : 978-602-97491-3-7
C-32-8
Tabel 1 Tingkat Akurasi Hasil Uji Coba Pada 8 Dataset Yang Digunakan Pada Penelitian
Citra Akurasi (%) anterior 01 93,79 anterior 02 95,78 anterior 03 95,62 anterior 04 93,82 posterior 01 93,68 posterior 02 94,40 posterior 03 94,55 posterior 04 94,90
Hasil akurasi yang didapatkan oleh setiap data set yang digunakan cenderung bervariasi dan tidak menuju pada nilai konvergen tertentu. Nilai yang bervariasi tersebut disebabkan oleh adanya fungsi random pada algoritma IPC. Oleh karena nilai parameter yang dihasilkan bersifat acak, maka nilai MoM juga bersifat acak yang mengakibatkan tingkat akurasi yang berbeda-beda.
(a) (b) (c)
Gambar 7 Registrasi Citra Pada Anterior 01. (A) Citra Reference. (B) Citra Floating. (C) Hasil Registrasi Citra.
(a) (b) (c)
Gambar 8 Registrasi Citra Pada Anterior 02. (A) Citra Reference. (B) Citra Floating. (C) Hasil Registrasi Citra.
(a) (b) (c)
Gambar 9 Registrasi Citra Pada Anterior 03. (A) Citra Reference. (B) Citra Floating. (C) Hasil Registrasi Citra.
ISBN : 978-602-97491-3-7
C-32-9
(a) (b) (c)
Gambar 10 Registrasi Citra Pada Anterior 04. (A) Citra Reference. (B) Citra Floating. (C) Hasil Registrasi Citra.
(a) (b) (c)
Gambar 11 Registrasi Citra Pada Posterior 01. (A) Citra Reference. (B) Citra Floating. (C) Hasil Registrasi Citra.
(a) (b) (c)
Gambar 12 Registrasi Citra Pada Posterior 02. (A) Citra Reference. (B) Citra Floating. (C) Hasil Registrasi Citra.
(a) (b) (c)
Gambar 13 Registrasi Citra Pada Posterior 03. (A) Citra Reference. (B) Citra Floating. (C) Hasil Registrasi Citra.
(a) (b) (c)
Gambar 14 Registrasi Citra Pada Posterior 04. (A) Citra Reference. (B) Citra Floating. (C) Hasil Registrasi Citra.
KESIMPULAN
Dalam penelitian ini diusulkan sebuah metode untuk registrasi citra yang menggunakan teknik ekstraksi fitur menggunakan NSCT dan teknik pencocokan fitur menggunakan IPC. Metode ini telah berhasil melakukan registrasi citra pada citra dental periapikal. Hasil akurasi registrasi terlihat bervariasi dikarenakan adanya fungsi
random pada algoritma IPC. Hal ini dapat dioptimalkan dengan membangun fungsi random yang menghasilkan nilai parameter yang baik pada setiap iterasi, yaitu yang
mengarahkan hasil akurasi bersifat konvergen. Optimasi fungsi yang dibutuhkan pada penelitian ini akan menjadi fokus pada penelitian selanjutnya.
ISBN : 978-602-97491-3-7
C-32-10
DAFTAR PUSTAKA
[1] Ou Y. dkk. 2010, "DRAMMS: Deformable registration via attribute matching and mutual-saliency weighting", Medical Image Analysis, Vol. Article In Press.
[2] Okano T. dkk. 1990, "Digital subtraction of radiograph in evaluating alveolar bone changes after initial periodontal therapy", Oral surgery, oral medicine, oral pathology, oral radiology, and endodontics, Vol. 69:2. hal. 258-262.
[3] Byrd V. dkk. 1998, "Semiautomated image registration for digital subtraction radiography", Oral surgery, oral medicine, oral pathology, oral radiology, and endodontics : Mosby-Year Book, Inc., Vol. 85:4, hal. 473-478.
[4] Ettinger G.J. dkk. 1994, "Development of automated registration algorithms for subtraction radiography", Journal of Clinical Periodontology ed. 543 Blackwell Publishing Ltd, Vol. 21: 8. hal. 540.
[5] Yi W.J. dkk. 2006, "ROI-based image registration for digital subtraction radiography", Oral surgery, oral medicine, oral pathology, oral radiology, and endodontics, Vol. 101:4, hal. 523-529.
[6] Markaki V.E., Asvestas P.A. dan Matsopoulos G.K. 2009, "An iterative point correspondence algorithm for automatic image registration: An application to dental subtraction radiography", Computer Methods and Programs in Biomedicine, Vol. 93:1, hal. 61-72.
[7] Likar B. dan Pernus F. 1999, "Automatic extraction of corresponding points for the registration of medical images", Medical Physics, Vol. 26:8, hal. 1678-1686.
[8] Cunha A.L, J. Zhou dan M.N. Do 2006, "The Nonsubsampled Contourlet Transform: Theory, Design, and Applications", IEEE Transactions on Image Processing. Vol. 15: 10, hal. 3089-3101.
[9] Serief C. dkk. 2007, "An automatic image registration scheme based on the nonsubsampled contourlet transform", Signal Processing and Its Applications, 2007. ISSPA 2007. 9th International Symposium.
[10] Sarvaiya J., Patnaik S. dan Goklani H. 2010, "Image Registration using NSCT and Invariant Moment", International Journal of Image Processing, Vol. 4:2, hal. 119-130.
[11] Burt P.J. dan Adelson E.H 1983, "The Laplacian Pyramid as a Compact Image Code", IEEE Transactions on Communications, Vol. 31:4, hal. 532-540.