Simulasi Hasil Perancangan LPF (Low Pass Filter) Digital………..………..Hanafi
15
SIMULASI HASIL PERANCANGAN LPF (LOW PASS FILTER) DIGITAL
MENGGUNAKAN PROTOTIP FILTER ANALOG BUTTERWORTH
Hanafi1
1
Dosen Jurusan Teknik Elektro Politeknik Negeri Lhokseumawe
Email:[email protected]
ABSTRAK
Alat bantu Komputer dan perangkat lunak Matlab dapat digunakan untuk mensimulasikan hasil rancangan filter, dalam hal ini hasil rancangan filter digital LPF (Low Pass Filter) dari prototip filter analog. Simulasi ini menampilan sinyal masukan dan sinyal keluaran setelah penerapan filter LPF dalam domain waktu. Program dibuat ada tiga bagian proses yaitu proses sinyal masukan, proses pemfilteran dengan LPF, kemudian hasil proses pemfilteran berupa sinyal keluaran. Simulasi sinyal x(t) = sin (2 50 t) + sin (2 100 t) + x3 dengan asumsi sin (2
50 t) + sin (2 100 t) sebagai sinyal masukan tanpa noise dan x3 diasumsikan sebagai noise dalam simulasi ini nilai
diubah-ubah. Filter LPF digital yang dirancang dapat menyaring frekuensi yang diinginkan dan mengeliminasi
noise yang tidak diinginkan dengan indikasi pengurangan ripple dengan penaikan frekuensi noise yang diberikan.
Frekuensi noise yang yang dapat dieleminasi dengan baik 4500 Hz keatas. frekuensi dibawah 4500 sampai dengan 2000 Hz noise meningkat dengan indikasi bertambahnya ripple.
Kata-kata Kunci : Filter, Filter LPF, Ripple, Noise
I. PENDAHULUAN
Algoritma pemrosesan sinyal digital dapat diklasifikasikan sebagai sistem waktu diskrit. Umumnya diimplementasikan pada komputer atau pemrosesan sinyal digital DSP (Digital Signal
Processing). Akibat kelebihannya , filter-filter digital
sering menggantikan filter-filter analog klasik. Dengan bantuan perangkat lunak Matlab kita dapat mensimulasikan hasil rancangan filter digital dari prototip filter analog dan menganalisa hasil dari simulasi tersebut.
Dalam mendesain sistem-sistem komunikasi, kendali (kontrol), dan telemetri, kita sering harus memperhitungkan pula filter-filter pembentuk spectrum dari berbagai sinyal. Dikarenakan luasnya pemakaian berbagai komputer digital dan perangkat keras digital untuk tujuan tertentu, maka penyaringan digital telah menjadi suatu teknik yang sangat penting dalam berbagai penerapan yang mencakup pemrosesan sinyal pembicaraan, radar, seismic dan biomedis[2].
II. TINJAUAN PUSTAKA 2.1 Filter
Pengolahan sinyal merupakan suatu operasi matematika untuk mengolah/memproses sinyal menjadi informasi yang berguna (data). Informasi merupakan hasil pengolahan sinyal yang mempunyai daya guna. Filter memegang peranan penting dalam pengolahan sinyal. Filter adalah suatu rangkaian elektronik yang berfungsi untuk mengolah frekuensi dari suatu sinyal, frekuensi sinyal tersebut akan diloloskan atau diredam, dalam hal ini disesuaikan dengan kebutuhan. Berdasarkan sifat ini, filter
dibedakan menjadi 4 macam, yaitu low pass filter (LPF), high pass filter (HPF), band pass filter (BPF) dan band reject filter (BRF). Dalam DSP (Digital Signal Processing) filter analog berupa filter Butterworth , filter Chebyshev, dan filter Elliptic sebagai dasar dalam merancang filter digital IIR (Infinite Impulse Response) diperlukan fungsi alih filter analog H(s). Dari fungsi alih filter analog ini akan diturunkan fungsi alih filter digital H(z) [4].
2.2 Sistem Waktu Diskrit dalam Persamaan Beda (Difference Equation)
Persamaan beda merupakan bentuk umum dari system diskrit, di mana pada system analog bentuk umum keluaran system dinyatakan dengan persamaan differensial (differential equation). Dengan impuls respons h(n), keluaran system y(n) untuk setiap deret input x(n) dapat dituliskan dengan konvolusi seperti pada persamaan 1 dan 2 berikut ini:[4].
y(n) = ∑∞ h(k)x(n − k)
∞ ………(1)
Persamaan beda untuk filter dapat ditulis:
y(n) = − ∑ a y(n − k) + ∑ b x(n − k)...(2)
2.3 Filter Digital
Filter-filter digital biasanya diklasifikasikan sebagai filter tanggapan impuls yang lamanya terbatas(finite duration impulse response=FIR) atau filter tanggapan impuls yang lamanya tak terbatas (infinite duration impulse response=IIR). Filter-filter FIR dicirikan dengan suatu tanggapan impuls yang panjangnya terbatas atau secara setara dengan suatu fungsi alih dalam bentuk polinom [2]:
Jurnal Litek (ISSN: 1693-8097) Volume 10 Nomor 1, Maret 2013: hal. 15 - 20
16
Filter-filter IIR di pihak lain dicirikan oleh fungsi alih dalam bentuk suatu bentuk fungsi rasional atau perbandingan polinom[2]:( ) = ∑∑ ……… (4)
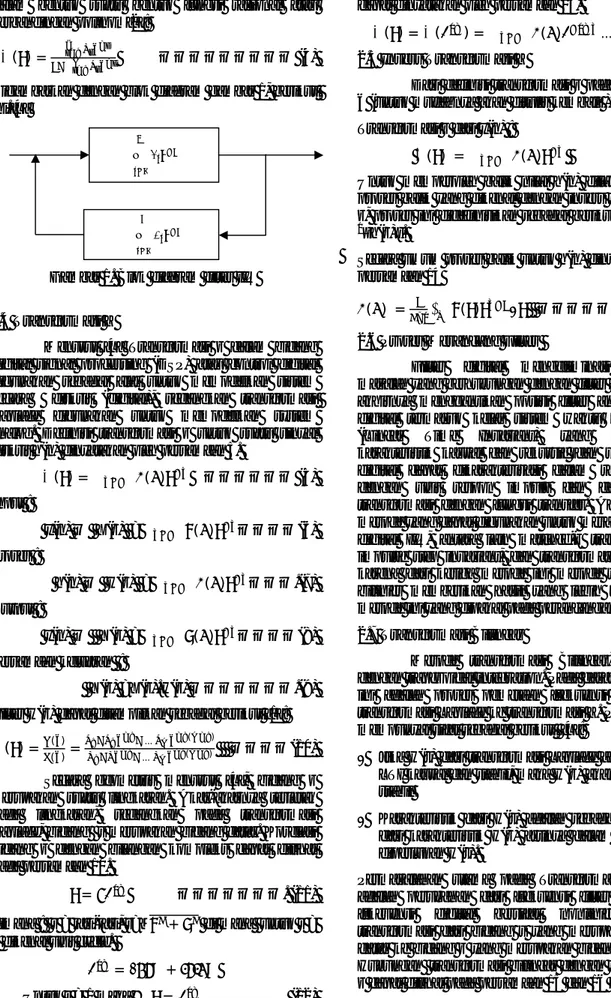
Digambarkan dengan blok diagram gambar 1, berikut ini.[4]
Gambar 1. Blok diagram filter IIR
2.4 Transformasi Z
Menurut [4] Transformasi z dalam bidang
digital signal processing (DSP) atau control digital
digunakan sebagai alat untuk memodelkan sistem secara diskrit (digital), sedangkan transformasi Laplace digunakan untuk memodelkan system analog. Definisi transformasi z untuk suatu sinyal diskrit h(n) dinyatakan oleh persamaan 5.
( ) = ∑∞ ℎ( ) ∞ ……… (5) Input : x(n) … X(z) = ∑∞ ( ) ∞ …………(6) Proses : h(n) … H(z) = ∑∞ ℎ( ) ∞ ……….(7) Output : y(n) … Y(z) = ∑∞ ( ) ∞ …………(8) Persamaan keluaran : Y(z) =X(z).H(z) ……….(9) Filter H(z) dapat ditampilkan sebagai berikut [1]:
( ) = ( ) ( )=
… ( )
… ( ) …………(10)
Secara geometris menurut [4], bidang z merupakan suatu lingkaran. Akar-akarnya terletak pada lingkaran, sedangkan pada transformasi Laplace, bidang s merupakan bidang datar. Korelasi bidang z dengan bilangan kompleks dapat dilihat pada persamaan 10.
= ………. (11)
dimana : r = jari-jari, r= + di mana untuk r = 1 dikenal unit cycle.
= +
Untuk r = 1 maka → = … … … …. (12)
Hubungan transformasi z dengan bidang frekuensi, dapat dinyatakan oleh persamaan 13.
( ) = ( ) = ∑∞ ℎ( )
∞ … … … … (13)
2.5 Invers Transformasi Z
Dari definisi transformasi z pada persamaan 6 (untuk mudahnya akan ditulis kembali ).
Transformasi z dari x(n) : ( ) = ∑∞ ℎ( )
∞
Untuk memperoleh balik nilai h(n) dilakukan suatu proses balik yang dikenal dengan invers transformasi z, proses ini didefinisikan sebagai berikut : h(n) = z
-1
{h(z)}.
Secara umum proses balik untuk h(n) dinyatakan oleh persamaan 14
ℎ( ) = ∫ ( ) ………..(14)
2.6 Proses Merancang Filter
Filter digital mengeliminasi sejumlah masalah yang berhubungan dengan filter analog yang akhirnya menggantikan posisi filter analog. Filter digital termasuk kelas sistem waktu diskrit LTI (Linear Time Invariant) yang mempunyai karakteristik kausal dan rekursif dan stabil. Filter digital dapat dikarakterisasi dalam ranah waktu dengan unit respon impuls dan dalam ranah transformasi dengan fungsi transfer. Ada beberapa metode yang dapat digunakan untuk merancang filter digital IIR, antara lain matched-z transformation, impulse step invariant, dan transformation bilinier, karena dari ketiga metode ini metode transformasi bilinier memberikan hasil yang lebih teliti, maka metode ini yang dipakai pada perancangan ini [4].
2.7 Transformasi Bilinear
Metode transformasi Bilinear, ekuivalen dengan trapezoidal integration. Pada dasarnya metode ini adalah proses pemetaan frekuensi dari relasi transformasi Laplace ke transformasi Z. Pemetaan ini mempunyai sifat sebagai berikut [4]:
Jika H(s) dari transformasi Laplace adalah sistem LTI kausal dan stabil, maka H(z) akan kausal dan stabil
Karakteristik dari H(s) adalah sebagai sifat awal dari karakteristik H(z) artinya dalam metode ini diperlukan H(s).
Permasalahan utama pada Transformasi Biliniear adalah perubahan dari frekuensi filter analog ke frkeuensi digital bersifat nonlinier, dimana transformasi dari bidang s yang merupakan bidang datar ke bidang z yang merupakan bidang lingkaran. Hubungan transformasi bilinear dengan transformasi z dapat dilihat pada persamaan 15 dan 16 [4]
Simulasi Hasil Perancangan LPF (Low Pass Filter) Digital………..………..Hanafi
17
= ( ) ( ) dan = … … … …. (15) Sehingga : H(z)=H(s)| ( ) ( )Transformasi invers-nya adalah: = , dengan Ωi
=2πf rad/s sebagai symbol frekuensi analog dan ωi = ΩiTs=2π rad……… (16)
Hubungan antara frekuensi analog dengan frekuensi digital merupakan hubungan yang tidak linier di mana bidang z = ejΩ adalah lingkaran, sedangkan s = jω adalah bidang datar. Untuk itu perlu diadakan koreksi yang dikenal dengan prewarping.
Ω= ( )
( ) ………(17)
Jika persamaan 16 dibagi dengan j dan fungsi tangensial diterapkan pada bagian sebelah kanan persamaan 16, maka akan diperoleh persamaan 17 dan 18 [4].
Ω= ……… (18)
= 2 Ω … … … …. (19) Fungsi magnitude kwadrat filter butterworth adalah sebagai berikut[3]:
| ( Ω)| = Ω Ω
………. (20)
Orde filter low-pass Butterworth analog dapat dihitung besarnya orde (N) dari filter dengan menggunakan persamaan berikut[4]:
=
/
Ω Ω
… … … (21)
III. METODE PENELITIAN
3.1 Perancangan Filter
Perancangan filter LPF ini akan melewatkan bandwidth frekuensi dengan respons frekuensi rata, turun sampai dengan – 3 dB dari 0~1500 Hz. Pada frekuensi 2500 Hz sinyal diredam minimum 10 dB. Filter tersebut dirancang bekerja pada frekuensi sampling 10 kHz dengan sinyal masukan berupa :
x(t) = sin (2 50 t) + sin (2 100 t) +sin (2 2500 t) Frekeunsi sampling yang digunakan dalam perancangan filter LPF digital adalah fs = 10 kHz,
maka perioda sampling adalah, Ts = 10-4 detik.
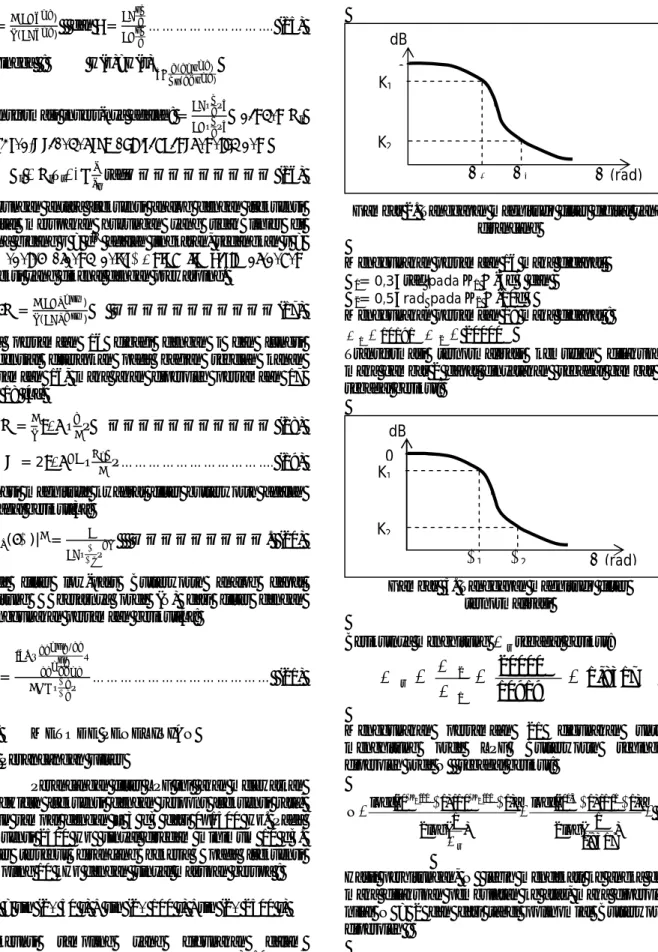
Tanggapan magnitudo filter digital yang dirancang seperti yang diperlihatkan pada gambar 2, sebagai berikut ini.
Gambar 2. Tanggapan magnitudo filter digital yang dirancang
Menggunakan persamaan 16 maka didapat ω1= 0,3 rad pada K1 ≥ -3dB dan
ω2= 0,5 rad pada K2 ≥ -10dB
Menggunakan persamaan 18 maka didapat :
10191
1
2 20000
Transformasi ternormalisasi kemudian dilakukan, maka gambar 2 dapat dinyatakan sebagai gambar 3 sebagai berikut:
Gambar 3. Tanggapan magnitudo filter ternormalisasi
Berikutnya menghitung
rsebagai berikut:8317
,
1
10919
20000
1 2
rMenggunakan persamaan 21 digunakan untuk menghitung orde LPF Butterworth sehingga diperoleh orde N sebagai berikut:
1,8191 ) 8317 , 1 1 log( 2 )] 1 10 / ) 1 10 log[( ) 1 log( 2 )] 1 10 / ) 1 10 log[( 1/10 2/10 0,3 1 r K K N
Hasil perhitungan, N lebih mendekati ke angka dua maka dilakukan pembulatan ke atas, maka diperoleh nilai N = 2 dan dari tabel polinomial Butterworth diperoleh :
1
s
2
s
)
s
(
B
n
2
oleh Karena itu untuk LPF Butterworth orde 2 ternormalisasi berlaku: dB K1 Ω1 0 Ω2 (rad) K2 dB K1 0 (rad) K2
Jurnal Litek (ISSN: 1693-8097) Volume 10 Nomor 1, Maret 2013: hal. 15 - 20
18
1 2 1 ) ( 1 ) ( 2 s s s B s H n LPFVariabel s/ menggantikan variable s maka maka LPF Butterworth analog hasil disain diperoleh:
1 10919 2 10919 1 1 2 1 ) ( 1 ) ( ) ( 2 1 2 1 / 1 s s s s s B s H s H n s s LPF LPF
Transfer function H(z) menggunakan dari Filter Low-Pass digital yang direncanakan diperoleh dengan mengganti variable S dengan ( – ), maka diperoleh: 1 1 1 5904 , 2 1 1 3550 , 3 1 ) ( 1 1 2 1 1 z z z z z H
Menggunakan persamaan 10 transfer function H(z) dari Low-Pass Filter digital yang direncanakan dapat dibuat sebagai berikut:
2 1 2 1 2722 , 0 7478 . 0 1 1311 , 0 2622 , 0 1311 , 0 ) ( z z z z z H
Menggunakan persamaan 2 persamaan beda Low-Pass Filter digital yang direncanakan dapat dibuat menjadi sebagai berikut :
y(n) = 0,1311 x(n) + 0,2622 x(n-1) + 0,1311 x(n-2) +0,7478 y(n-1) – 0,2722 y(n-2)
Nilai koefisien dari persamaan ini, akan menjadi parameter input dalam program simulasi yang akan dilakukan.
3.2 Implementasi dalam Pemrograman Matlab
Simulasi ini menampilan sinyal masukan dan sinyal keluaran setelah penerapan filter LPF dalam domain waktu. Program dibuat ada tiga bagian proses yaitu proses sinyal masukan, proses pemfilteran dengan LPF, kemudian hasil proses pemfilteran berupa sinyal keluaran. Program untuk memproses dan menampilkan sinyal masukan adalah sebagai berikut:
Program pemrosesan sinyal masukan : x1= sin (2 50 t), dengan f1=50 Hz
x2= sin (2 100 t), dengan f2=100 Hz
x3= sin (2 2500 t), dengan f3=2500 Hz
x3 anggap sebagai noise dan dapat diubah-ubah
nilainya dalam simulasi ini
x(t) = sin (2 50 t) + sin (2 100 t) + x3
adalah sebagai berikut: %Sinyal masukan
Fs=10000;%Sampling Sinyal masukan t=(1:300)/Fs; x=sin(2*pi*50*t)+sin(2*pi*100*t)+sin(2*pi*2500*t); subplot(2,1,1); plot(t,x,'k'); title('Sinyal Masukan') xlabel('Waktu, t(detik)') ylabel('Level Sinyal, x(t)') axis([0 0.02 -2 2]) grid on
Program untuk memproses pemfilteran menggunakan LPF persamaan beda dengan memasukan koefisien filter y(n) = 0,1311 x(n) + 0,2622 x(n-1) + 0,1311 x(n-2) +0,7478 y(n-1) – 0,2722 y(n-2) sebagai berikut: for n= 1:200; if n==1; y(n)= 0.1311 *x(n); elseif n==2; y(n)=0.1311*x(n)+ 0.2622*x(n-1)+ 0.7478*y(n-1); elseif n>=3; y(n)= 0.1311 *x(n)+ 0.2622 *x(n-1)+ 0.1311 *x(n-2)+ 0.7478 *y(n-1)- 0.2722 *y(n-2); end end
Program untuk memproses dan menampilkan sinyal keluaran adalah sebagai berikut:
subplot(2,1,2);
plot(t(1:200),y(1:200),'k'); title('Sinyal Keluaran') xlabel('Waktu, t(detik)') ylabel('Level Sinyal, y(t)') axis([0 0.02 -1.5 1.5]) grid on
IV. HASIL DAN PEMBAHASAN
Hasil dari eksekusi program matlab diatas sebagai berikut:
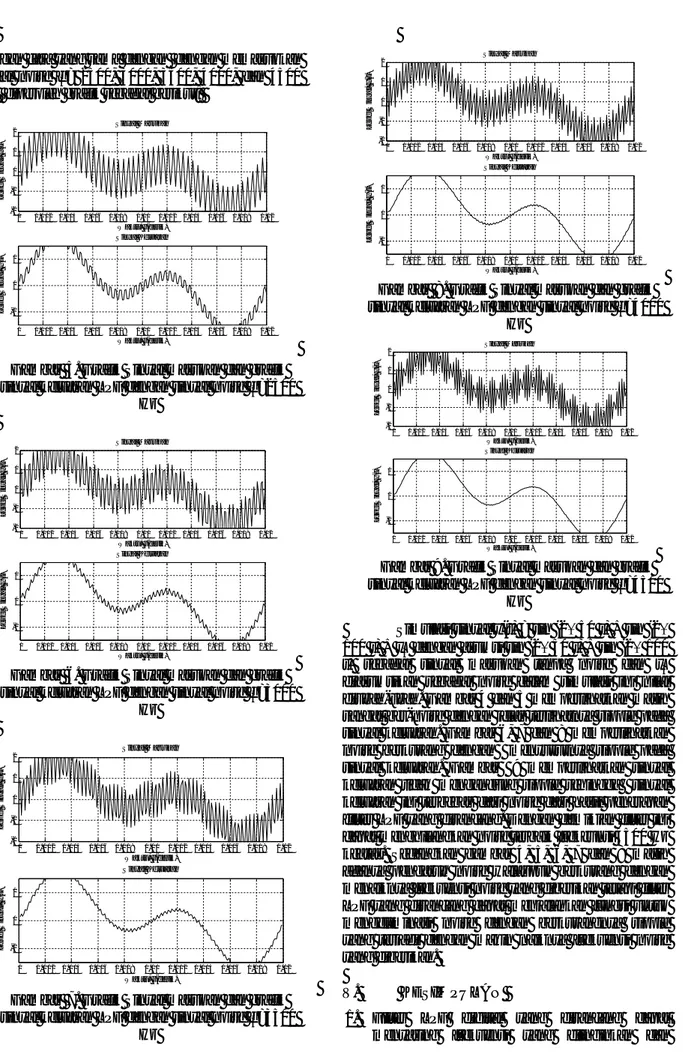
Gambar 4. Grafik Sinyal masukan dan grafik sinyal keluaran LPF dengan sinyal noise f3=2000 Hz
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 -2 -1 0 1 2 Sinyal Masukan Waktu, t(detik) L e v e l S in y a l, x (t ) 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 -1 0 1 Sinyal Keluaran Waktu, t(detik) L e v e l S in y a l, y (t )
Simulasi Hasil Perancangan LPF (Low Pass Filter) Digital………..………..Hanafi
19
Dengan cara yang sama dengan dengan memasukkan sinyal noise f3= 2500, 3000, 3500, 4000, dan 4500Hz, diperoleh grafik sebagai berikut:
Gambar 5. Grafik Sinyal masukan dan grafik sinyal keluaran LPF dengan sinyal noise f3=2500
Hz
Gambar 6. Grafik Sinyal masukan dan grafik sinyal keluaran LPF dengan sinyal noise f3=3000
Hz
Gambar 7. Grafik Sinyal masukan dan grafik sinyal keluaran LPF dengan sinyal noise f3=3500
Hz
Gambar 8. Grafik Sinyal masukan dan grafik sinyal keluaran LPF dengan sinyal noise f3=4000
Hz
Gambar 9. Grafik Sinyal masukan dan grafik sinyal keluaran LPF dengan sinyal noise f3=4500
Hz
Simulasi sinyal x(t) = sin (2 50 t) + sin (2 100 t) + x3 dengan asumsi sin (2 50 t) + sin (2 100
t) sebagai sinyal masukan tanpa noise dan x3
diasumsikan sebagai noise dalam simulasi ini nilai diubah-ubah. Gambar 4 dan 5 memperlihatkan masih sangat ber-noise dengan jelas terlihatnya ripple pada sinyal keluaran. Gambar 6, 7 dan 8 memperlihatkan
noise berkurang dengan menyusutnya ripple pada
sinyal keluaran. Gambar 9 memperlihatkan sinyal keluaran tidak mengandung ripple sehingga sinyal keluaran ini terbebas dari noise dari hasil penerapan filter LPF yang dirancang. Dengan demikian filter ini dapat menghilangkan noise terbaik frekeunsi 4500 Hz keatas. Sedangkan gambar 4, 5, 6, 7 dan 8 masih adanya pengaruh noise walaupun berkurang dengan menaiknya frekuensi noise yang diberikan tetapi filter LPF yang dirancang dapat menjalankan fungsi untuk mengeliminasi noise dengan berkurangnya ripple yang terjadi dengan makin naiknya frekuensi noise yang diberikan.
V. KESIMPULAN
1. Filter LPF digital yang dirancang dapat menyaring frekuensi yang diinginkan dan
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 -2 -1 0 1 2 Sinyal Masukan Waktu, t(detik) L e v e l S in y a l, x (t ) 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 -1 0 1 Sinyal Keluaran Waktu, t(detik) L e v e l S in y a l, y (t ) 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 -2 -1 0 1 2 Sinyal Masukan Waktu, t(detik) L e v e l S in y a l, x (t ) 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 -1 0 1 Sinyal Keluaran Waktu, t(detik) L e v e l S in y a l, y (t ) 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 -2 -1 0 1 2 Sinyal Masukan Waktu, t(detik) L e v e l S in y a l, x (t ) 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 -1 0 1 Sinyal Keluaran Waktu, t(detik) L e v e l S in y a l, y (t ) 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 -2 -1 0 1 2 Sinyal Masukan Waktu, t(detik) L e v e l S in y a l, x (t ) 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 -1 0 1 Sinyal Keluaran Waktu, t(detik) L e v e l S in y a l, y (t ) 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 -2 -1 0 1 2 Sinyal Masukan Waktu, t(detik) L e v e l S in y a l, x (t ) 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 -1 0 1 Sinyal Keluaran Waktu, t(detik) L e v e l S in y a l, y (t )
Jurnal Litek (ISSN: 1693-8097) Volume 10 Nomor 1, Maret 2013: hal. 15 - 20
20
mengeliminasi noise yang tidak diinginkan dengan indikasi pengurangan ripple dengan penaikan frekuensi noise yang diberikan. 2. Frekuensi noise yang yang dapat dieleminasidengan baik 4500 Hz ke atas
3. Frekuensi dibawah 4500 sampai dengan 2000
Hz noise meningkat dengan indikasi
bertambahnya ripple
DAFTAR PUSTAKA
[1] Biran, A., dan Breiner, M., 1995, MATLAB for
Engineers, New York: Addison-Wesley
Publishing Company.
[2] Gabel R.A., dan Roberts, R.A., 1996, Sinyal dan
Sistem Linear. Jakarta: Erlanggga.
[3] Oppenheim, A. V., Schafer, R. W., dan Buck J. R., 1999, Discrete-Time Signal Processing, New Jersey, Prentice Hall
[4] Tanudjaja, H., 2007, Pengolahan Sinyal Digital
& Sistem Pemrosesan Sinyal.Yogyakarta :