Realisasi Instrumen EKG untuk
Pengukuran Sinyal EKG dengan
Konfigurasi Elektroda Limb Lead II
Innocentio Aloysius Loe dan Hanapi Gunawan
Jurusan Teknik Elektro, Universitas Kristen Maranatha, Bandung Jl. Suria Sumantri 65, Bandung 40164, Indonesia
innoaloe@gmail.com; hanapigunawan@gmail.com
Abstrak: Elektrokardiogram (EKG) adalah rekaman grafis dari potensial listrik yang dihasilkan berkaitan dengan aktivitas detak jantung. Untuk memperoleh sinyal EKG dibutuhkan sistem penguat sinyal analog yang presisi. Perancangan sistem penguat ditujukan untuk memperoleh sinyal EKG Limb Lead II (LL II). Dilakukan pengukuran terhadap CMRR, respon frekuensi, serta impedansi masukan penguat. Sinyal EKG yang didapat dibandingkan dengan sinyal EKG yang diperoleh menggunakan Vernier EKG Sensor pada subyek yang sama. Dari hasil percobaan, diperoleh penguatan tegangan pada frekuensi menengah sebesar 75 dB dan CMRR 68 dB
Kata kunci: Elektrokardiogram, Sistem Penguat
Abstract: Electrocardiogram (ECG) is a graphic recording of the electrical potentials produced in association with the heartbeat. Precision analog signal amplifier system is needed to acquire ECG signal. The amplifier system is designed to acquire Limb Lead II (LL II) ECG signal. Measured performances including CMRR, frequency response, and input impedance of the amplifier. The acquired ECG signals are compared with acquired ECG signals from Vernier EKG Sensor on a same subject. From the experimental result, the voltage gain at mid band frequency is 75 dB and the CMRR is 68 dB
Keywords: Electrocardiogram, Amplifier System
I. PENDAHULUAN
Pengamatan sinyal Elektrokardiogram atau EKG merupakan cara yang digunakan dalam bidang kedokteran untuk mengamati aktivitas listrik jantung manusia. Informasi yang didapat dari sinyal EKG dapat digunakan untuk diagnosa penyakit ataupun kelainan fisik seseorang. Sinyal EKG pada jantung tersebar hingga permukaan tubuh, sehingga dapat diperoleh dengan menempelkan elektroda-elektroda pada tubuh. Amplitudanya sangat rendah (berkisar 1 mV hingga 3 mV)[1], selain itu sinyal EKG merupakan sinyal differensial sehingga dibutuhkan
ISSN 1979-2867 (print) Electrical Engineering Journal
sistem penguat yang dapat meredam sinyal-sinyal common-mode serta menguatkan sinyal differensial. Sinyal EKG memiliki kisaran bandwidth 0,1 – 250 Hz.
Jala-jala listrik (50 Hz di Indonesia), frekuensi tinggi dari lampu fluorescent (1 kHz – 10 kHz), dan sinyal-sinyal EMI merupakan sumber noise. Pada frekuensi rendah juga dapat muncul gangguan yang disebut baseline wander yang muncul akibat pernapasan dan gerakan tubuh (motion artifact). Sistem penguat harus dapat meredam noise dan gangguan tersebut, sehingga dibutuhkan penguat yang memiliki common-mode rejection ratio (CMRR) tinggi, bandwidth yang terbatas, serta impedansi masukan yang besar.
Instrumen yang dirancang ditujukan untuk mengukur sinyal EKG dengan konfigurasi elektroda Limb Lead (LL) II. Sistem penguat dirancang menggunakan kombinasi penguat operasional, instrumentation amplifier, serta komponen-komponen pasif untuk mendapatkan karakteristik sistem penguat yang sesuai untuk pemerolehan sinyal EKG. Hasilnya akan dibandingkan dengan instrumen EKG buatan Vernier Laboratories.
II. DESAIN SISTEM PENGUAT
II.1. Sistem Penguat
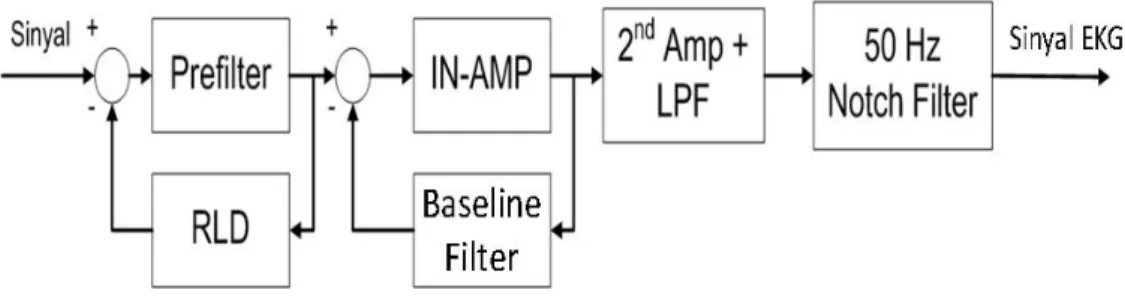
Blok perancangan sistem penguat ditunjukkan pada Gambar 1. Sinyal dilewatkan pada prefilter dan tegangan common mode-nya diumpanbalikkan ke tubuh melalui rangkaian Right Leg Drive (RLD) yang akan dibahas kemudian. Suatu Instrumentation Amplifier (IN-AMP) melakukan penguatan terhadap sinyal. Keluaran IN-AMP diumpanbalikkan melalui baseline filter. Penguat kedua sekaligus berfungsi sebagai lowpass filter. Terakhir digunakan notch filter 50 Hz untuk meredam noise jala-jala.
Gambar 1. Diagram blok sistem penguat
II.2. Pemilihan Elektroda
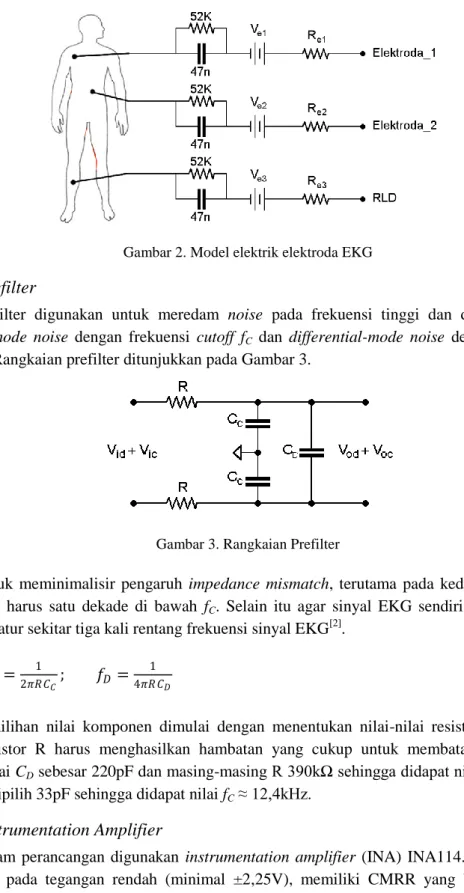
Tubuh manusia akan tampak sebagai suatu impedansi pada sistem elektronik. Elektroda yang melekat pada tubuh juga mempengaruhi nilai impedansi tersebut. Gambar 2 merupakan model elektrik elektroda yang akan digunakan dalam perancangan[2].
Tegangan DC tidak selalu muncul pada tubuh manusia, namun ada kalanya reaksi pada elektroda AgCl dapat mengakibatkan munculnya tegangan DC (Ve) yang mencapai 300mV pada
saat saturasi. Koneksi yang buruk pada elektroda juga dapat mengakibatkan munculnya hambatan seri (Re). Kemungkinan terburuk yang terjadi adalah ketika koneksi elektroda tidak
baik, keadaan ini dapat menyebabkan hambatan Re mencapai 100 kΩ. Pemahaman model
Gambar 2. Model elektrik elektroda EKG
II.3. Prefilter
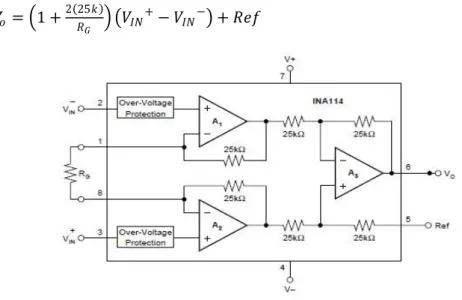
Prefilter digunakan untuk meredam noise pada frekuensi tinggi dan dapat meredam common-mode noise dengan frekuensi cutoff fC dan differential-mode noise dengan frekuensi cutoff fD. Rangkaian prefilter ditunjukkan pada Gambar 3.
Gambar 3. Rangkaian Prefilter
Untuk meminimalisir pengaruh impedance mismatch, terutama pada kedua CC, besar fD
setidaknya harus satu dekade di bawah fC. Selain itu agar sinyal EKG sendiri tidak teredam,
besar fD diatur sekitar tiga kali rentang frekuensi sinyal EKG
[2] . 𝑓𝐶 = 1 2𝜋𝑅𝐶𝐶; 𝑓𝐷 = 1 4𝜋𝑅𝐶𝐷 (1)
Pemilihan nilai komponen dimulai dengan menentukan nilai-nilai resistor, yang mana kedua resistor R harus menghasilkan hambatan yang cukup untuk membatasi arus listrik. Dipilih nilai CD sebesar 220pF dan masing-masing R 390kΩ sehingga didapat nilai fD = 927Hz.
Nilai CC dipilih 33pF sehingga didapat nilai fC ≈ 12,4kHz.
II.4. Instrumentation Amplifier
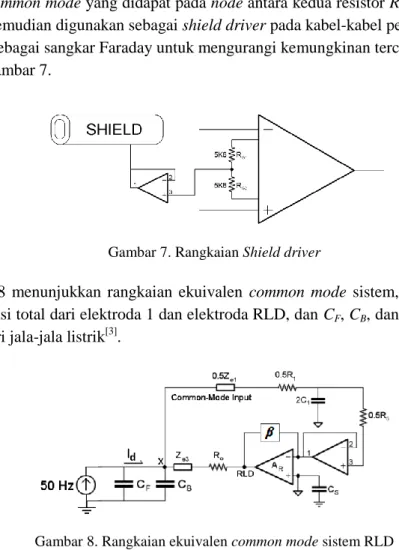
Dalam perancangan digunakan instrumentation amplifier (INA) INA114. Tipe ini dapat beroperasi pada tegangan rendah (minimal ±2,25V), memiliki CMRR yang besar (minimal 115dB), input bias current yang rendah (maksimal 2nA), serta memiliki proteksi tegangan tinggi pada terminal-terminal masukan differensialnya (hingga 40V).
Rangkaian internal INA114 seperti yang ditunjukkan pada Gambar 4, menggunakan topologi 3 Op-Amp (A1, A2 dan A3). Resistor-resistor internal seluruhnya bernilai 25kΩ,
𝑉𝑜 = 1 +2 25𝑘 𝑅
𝐺 𝑉𝐼𝑁
+− 𝑉
𝐼𝑁− + 𝑅𝑒𝑓 (2)
Gambar 4. Skematik INA114
Mengingat kemungkinan munculnya baseline wander, pada bagian ini nilai penguatan diatur agar tidak boleh terlalu besar karena A1 dan A2 dapat mengalami saturasi. Pada
perancangan dipilih penguatan total 5,5 kali dengan pemilihan RG 11,2kΩ, yang terdiri dari dua
resistor RG1 dan RG2 yang diserikan, masing-masing sebesar 5,6kΩ seperti ditunjukkan pada
Gambar 5. Dengan cara ini tegangan sinyal common mode bisa didapat pada node antara RG1
dan RG2.
Gambar 5. Pengaturan penguatan pada INA114
II.5. Penanggulangan Baseline Wander
Gambar 6. Integrator sebagai umpanbalik
Penanggulangan baseline wander menggunakan high-pass filter yang direalisasikan dengan suatu integrator yang diumpanbalikkan (feedback) ke pin Ref INA114 seperti pada Gambar 6. Baseline wander yang muncul akan segera dikoreksi sehingga tidak ikut dikuatkan
pada penguat tingkat berikutnya.
Berdasarkan Gambar 3 dan Gambar 5 serta Persamaan (2), hubungan VINA, Vid, dan Vref
dalam transformasi Laplace adalah : 𝑉𝑜 = 𝑠𝑅𝐼𝑁𝑇𝐶𝐼𝑁𝑇
𝑠𝑅𝐼𝑁𝑇𝐶𝐼𝑁𝑇+1 𝐴𝐼𝑉𝑖𝑑 + 𝑉𝑟𝑒𝑓 (3)
Persamaan (3) menunjukkan respon frekuensi highpass pada komponen Vid dengan
frekuensi cutoff fI. Dalam perancangan dipilih nilai fI =0,05 Hz dengan pemilihan resistor 247
kΩ untuk RINT, dan pemilihan kapasitor 330 nF untuk CINT. Tegangan referensi Vref diberi 1 V.
𝑓𝐼 = 1
2𝜋𝑅𝐼𝑁𝑇𝐶𝐼𝑁𝑇 (4)
II.6. Right Leg Drive dan Shield Driver
Sinyal common mode yang didapat pada node antara kedua resistor RG , di-buffer terlebih
dahulu untuk kemudian digunakan sebagai shield driver pada kabel-kabel penghubung elektroda dan berfungsi sebagai sangkar Faraday untuk mengurangi kemungkinan tercampur noise, seperti terlihat pada Gambar 7.
Gambar 7. Rangkaian Shield driver
Gambar 8 menunjukkan rangkaian ekuivalen common mode sistem, dengan Ze1 dan Ze3
adalah impedansi total dari elektroda 1 dan elektroda RLD, dan CF, CB, dan CS merupakan stray capacitance dari jala-jala listrik[3].
Gambar 8. Rangkaian ekuivalen common mode sistem RLD
Dari Gambar 8 bisa didapat sistem closed-loop RLD yang ditunjukkan pada Gambar 9. Tanpa jaringan feedback, transfer function blok AR akan tergantung pada nilai penguatan open loop (G) dan gain-bandwidth product (B) dari OpAmp yang digunakan. OpAmp TL072 yang digunakan memiliki nilai G = 3x105 dan B = 6π Mrad/s. Nilai Ro dipilih 390 kΩ pada
Gambar 9. Sistem RLD closed-loop[3]
Dengan program MATLAB didapat bode plot sistem seperti ditunjukkan pada Gambar 10. Bode plot menunjukkan bahwa nilai Gain Margin (G.M.) dan Phase Margin (P.M.) dari sistem tersebut bernilai negatif, yang menandakan sistem tersebut tidak stabil[4], sehingga
memungkinkan terjadinya osilasi dan saturasi penguat. Oleh karena itu dibutuhkan kompensasi untuk memastikan sistem tersebut stabil.
Gambar 10. Bode plot sistem RLD
Gambar 11. Realisasi rangkaian RLD
Kompensasi dilakukan dengan membatasi penguatan AR, seperti ditunjukkan pada
Gambar 11. Hubungan output RLD (VRLD) dengan tegangan common mode (VCM) tertera pada
Persamaan (5). Nilai Rf dipilih 1 MΩ sedangkan Ri dipilih 20 kΩ untuk mendapat penguatan 50
kali. Pada rangkaian ini jaringan feedback Rf tidak dihubungkan pada keluaran OpAmp,
melainkan pada Ro dengan tujuan meningkatkan kompensasi, karena feedback didapat langsung
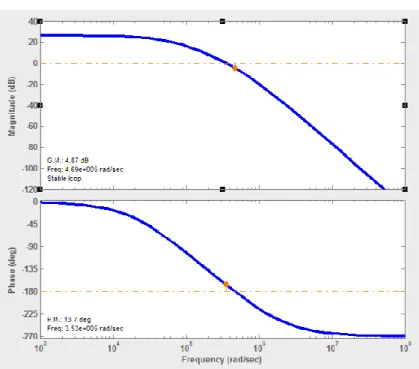
𝑉𝑅𝐿𝐷 𝑠 = −𝑅𝑓𝑅𝑖𝑉𝐶𝑀 𝑠 (5) Gambar 12 menunjukkan sistem closed-loop RLD terkompensasi. Dari bode plot sistem pada Gambar 13 dapat dilihat bahwa kompensasi menghasilkan nilai G.M. dan P.M. positif, menandakan sistem stabil. Bandwidth sistem juga lebih dari 1 kHz, yang artinya noise EMI dari fluorescent light akan diumpanbalikkan juga.
Gambar 12. Sistem closed-loop RLD terkompensasi
Gambar 13. Bode plot sistem RLD terkompensasi
II.7. Penguat Tingkat Kedua
Penguat tingkat kedua direalisasikan dengan suatu lossy integrator seperti yang ditunjukkan pada Gambar 14 yang sekaligus berfungsi sebagai lowpass filter.
𝑉𝑇2 = −𝑅2 𝑅1
1
1+𝑠𝑅2𝐶𝑓 (𝑉𝐼𝑁𝐴 − 𝑉𝑅𝐸𝐹) + 𝑉𝑅𝐸𝐹 (6)
Berdasarkan Persamaan (3) dan (6), dan dengan asumsi frekuensi sinyal berada pada passband highpass dan lowpass filter, didapat
𝑉𝑇2 𝑠 = −𝑅𝑅2
1𝐴𝐼𝑉𝐼𝐷 𝑠 + 𝑉𝑅𝐸𝐹 𝑠 (7)
Dari Persamaan (7) didapat bahwa penguatan sinyal EKG bersifat negatif, sehingga posisi pemasangan elektroda positif dan negatif harus ditukar untuk mendapat sinyal EKG yang sesuai.
Pemilihan R2 = 100kΩ dan R1 = 560Ω menghasilkan penguatan 178,6 kali, sehingga total
penguatan sinyal differensial adalah 982,15. Pemilihan Cf = 3,3nF menghasilkan frekuensi cutoff integrator 482 Hz.
II.8. Notch Filter
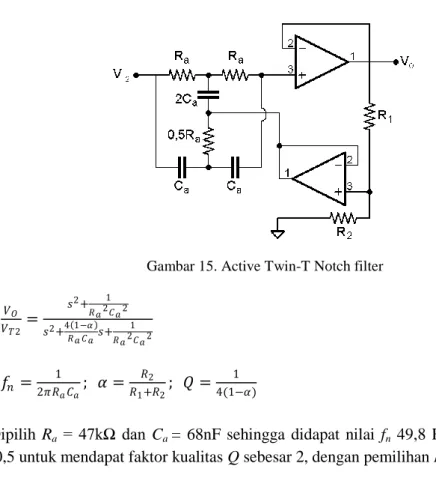
Digunakan topologi twin-T notch filter, seperti ditunjukkan pada Gambar 15, dengan transfer function filter ditunjukkan pada Persamaan (8).[5]
Gambar 15. Active Twin-T Notch filter 𝑉𝑂 𝑉𝑇2 = 𝑠2+ 1 𝑅𝑎 2𝐶𝑎 2 𝑠2+4 1−𝛼 𝑅𝑎 𝐶𝑎𝑠+ 1 𝑅𝑎 2𝐶𝑎 2 (8) dengan 𝑓𝑛 =2𝜋𝑅1 𝑎𝐶𝑎; 𝛼 = 𝑅2 𝑅1+𝑅2; 𝑄 = 1 4(1−𝛼) (9)
Dipilih Ra = 47kΩ dan Ca = 68nF sehingga didapat nilai fn 49,8 Hz. Faktor feedback α
dipilih 0,5 untuk mendapat faktor kualitas Q sebesar 2, dengan pemilihan R1 = R2 = 1 MΩ.
III. PERFORMANSI SISTEM PENGUAT
III.1. CMRR
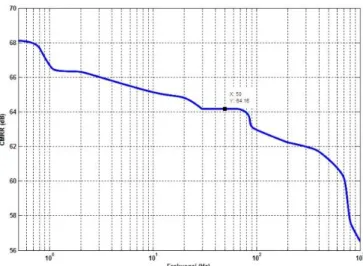
CMRR diukur pada keluaran INA. Hasil pengukuran pada rentang frekuensi 0,5 – 1000 Hz secara grafis ditampilkan pada Gambar 16.
Gambar 16. Grafik CMRR pada keluaran INA
Didapat CMRR maksimal 68,14 dB pada frekuensi 0,5 Hz.. Pada frekuensi 50 Hz didapat CMRR sekitar 64,16 dB. Nilai CMRR yang didapat sudah memadai untuk melakukan pengambilan sinyal EKG.
III.2. Respon Frekuensi Penguat
Pengukuran respon frekuensi dilakukan pada keluaran penguat tingkat kedua. Hasil pengukuran pada rentang frekuensi 0,5 – 1000 Hz ditunjukkan secara grafis pada Gambar 17.
Gambar 17. Respon frekuensi penguat
Dapat dilihat bahwa penguat memberi penguatan yang besar pada frekuensi rendah, kemudian semakin berkurang pada frekuensi tinggi, dengan awal stopband sekitar frekuensi 300 Hz. Meskipun demikian notch filter analog yang dirancang tidak terlalu baik karena masih menghasilkan penguatan sekitar 55 dB pada frekuensi 50 Hz.
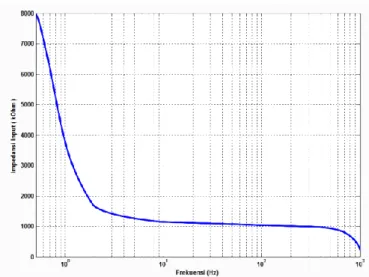
III.3. Impedansi Masukan Penguat
INA114 memiliki impedansi masukan instrinsik 10 GΩ, 6 pF. Meskipun demikian impedansi masukan keseluruhan dipengaruhi oleh komponen eksternal, salah satunya adalah rangkaian prefilter. Hasil pengukuran impedansi masukan penguat ditunjukkan secara grafis
ditampilkan pada Gambar 18.
Gambar 18. Impedansi masukan penguat
Dapat dilihat bahwa pada frekuensi rendah impedansi masukan mendekati nilai intrinsik INA114. Pada daerah frekuensi sinyal EKG besar impedansi masukan masih cukup besar (± 1 MΩ) yang memastikan sinyal EKG tidak terdistorsi sebelum dikuatkan.
IV. SINYAL KELUARAN PENGUAT
Sinyal keluaran penguat diukur dengan osiloskop. Elektroda dihubungkan pada subyek penelitian menggunakan konfigurasi LL II yang telah ditentukan sebelumnya. Sinyal keluaran diambil pada beberapa kondisi dan dibandingkan dengan sinyal keluaran Vernier EKG Sensor[6]. Pada tiap kondisi, gambar atas adalah keluaran sistem penguat yang dirancang, dengan skala vertikal 1V/div, sedangkan gambar bawah adalah keluaran Vernier EKG Sensor dengan skala vertikal 10mV/div.
IV.1. Kondisi (1), Subyek Diam dan Tidak Memegang Sesuatu
Sinyal keluaran pada kondisi (1) ditunjukkan pada Gambar 19. Sinyal yang didapat sudah sesuai dengan bentuk gelombang sinyal EKG Limb Lead II pada umumnya. Kompleks QRS memiliki amplituda terbesar, dibandingkan gelombang P dan T.
Karakteristik tersebut serupa dengan keluaran Vernier EKG Sensor. Perbedaan hanya terletak pada amplituda maksimal saja.
IV.2. Kondisi (2), Subyek Memegang Kabel atau Logam
Gambar 20 menunjukkan sinyal yang didapat pada kondisi (2), yang mana terlihat noise yang cukup besar. Hal ini disebabkan isolasi rangkaian penguat dengan jala-jala listrik berkurang, sedangkan kemampuan penguat untuk meredam frekuensi jala-jala tidak terlalu baik, sehingga noise yang muncul pada kondisi ini cukup besar.
Vernier EKG Sensor juga mengalami masalah yang serupa. Di dalam gambar terlihat noise jala-jala masih tercampur pada sinyal keluaran.
Gambar 20. Perbandingan Sinyal EKG Diukur pada Kondisi (2)
IV.3. Kondisi (3), Subyek Bernapas dengan Kuat
Pada kondisi (3) sinyal dipengaruhi oleh motion artifact, sehingga menghasilkan baseline wander seperti ditunjukkan pada Gambar 21. Perubahan level sinyal DC akibat kondisi (3) tidak terlalu besar. Dapat dilihat bahwa Vernier EKG Sensor lebih tahan terhadap pengaruh baseline wander.
Gambar 21. Perbandingan Sinyal EKG Diukur pada Kondisi (3)
IV.4. Kondisi (4), Subyek Melakukan Gerakan Ekstrim
Sinyal EKG pada kondisi (4) ditunjukkan pada Gambar 22. Gerakan mengakibatkan munculnya tegangan differensial yang besar sehingga penguat mengalami saturasi pada saat gerakan terjadi.
Gambar 22. Perbandingan Sinyal EKG Diukur pada Kondisi (4)
Dari Gambar 22 dapat dilihat bahwa Vernier EKG Sensor lebih rentan terhadap motion artifact dibandingkan instrumen yang dirancang.
V. KESIMPULAN
Performansi instrumen yang telah direalisasikan, dari segi CMRR, respon frekuensi, serta impedansi masukan, sudah cukup memadai untuk perolehan sinyal EKG.
Instrumen dapat memperoleh sinyal EKG yang sesuai pada konfigurasi elektroda Limb Lead II. Meskipun demikian instrumen masih rentan terhadap sumber-sumber noise, terutama dari jala-jala listrik dan motion artifact.
Dari hasil percobaan diperoleh penguatan tegangan pada frekuensi menengah sebesar 75 dB dan CMRR 68 dB.
Perbandingan sinyal EKG yang didapat dari sistem penguat yang dirancang dengan Vernier EKG Sensor menunjukkan bahwa instrumen yang dirancang dapat digunakan sebatas untuk fungsi eksperimental, mengingat sistem masih cukup rentan terhadap gangguan-gangguan dari lingkungan.
DAFTAR REFERENSI
[1] T. Kugelstadt, “Getting the most out of your instrumentation amplifier design”, Texas Instrument Analog Applications Journal, 2005.
[2] M.W. Hann, “Ultra Low Power, 18 bit Precision ECG Data Acquisition System”, Texas Instrument Precision Design, 2013
[3] Winter & Webster, “Driven Right-Leg Circuit Design”, IEEE, 1983 [4] K. Ogata, Modern Control Engineering, 1970.
[5] Van Valkenburg, Analog Filter Design, Oxford University Press, 1982 [6] http://www.vernier.com/products/sensors/ekg-bta/
![Gambar 9. Sistem RLD closed-loop [3]](https://thumb-ap.123doks.com/thumbv2/123dok/4436088.3223387/6.892.307.591.142.246/gambar-sistem-rld-closed-loop.webp)