ϰ BAB II
LANDASAN TEORI 2.1 Listrik
Listrik merupakan suatu muatan yang terdiri dari muatan positif dan muatan negatif, dimana sebuah benda akan dikatakan memiliki energi listrik apabila suatu benda itu mempunyai perbedaan jumlah muatan. Energi listrik banyak di gunakan untuk berbagai peralatan atau mesin. Energi listrik tidak dapat dilihat secara langsung namun dampak atau akibat dari energi listrik dapat dilihat seperti sinar atau cahaya bola lampu[1].
Satuan-satuan listrik yang paling umum kita gunakan sehari-hari adalah (ILR,2011) :
Tegangan listrik (voltage) dalam satuan volt (V)
Arus listrik (current) dalam satuan ampere (A)
Frekuensi (frequency) dalam satuan Hertz (Hz)
Daya listrik (power) dalam satuan watt (W) atau volt-ampere (VA) dan energi listrik dalam satuan watt-hour (Wh) atau kilowatt-hour (kWh).
2.1.1 Daya Listrik
Untuk menghitung pemakaian listrik dapat dihitung dari daya listrik. Daya listrik merupakan jumlah energi yang digunakan untuk melakukan kerja atau usaha. Dalam sistem listrik arus bolak-balik, dikenal 3 jenis daya yaitu :
Daya Nyata ( simbol : S ; satuan : VA (Volt Ampere)) Daya Aktif (simbol : P ; satuan : W (Watt))
ϱ
(1) Daya Aktif adalah daya yang digunakan untuk energi kerja sebenarnya. Daya inilah yang dikonversikan menjadi energi tenaga (mekanik), cahaya atau panas. Satuan daya aktif adalah watt.
Daya Reaktif adalah daya yang digunakan untuk pembangkitan fluks magnetik atau medan magnet. Satuannya adalah VAR. contoh peralatan listrik yang memerlukan daya reaktif adalah motor listrik atau dinamo, trafo, bola lampu konvensional dan peralatan listrik lain yang menggunakan proses induksi listrik lilitan untuk operasinya.
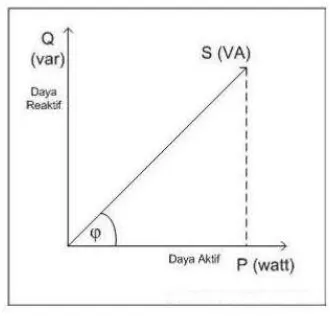
Daya Nyata dengan satuan VA adalah total perkalian antara arus dan tegangan pada suatu jaringan listrik atau penjumlahan dengan metode trigonometri dari daya aktif dan reaktif dalam segitiga daya.
Hubungan antara ketiga jenis daya ini dapat dilihat pada Gambar 1.
Gambar 1 Segitiga Daya Listrik
Dengan melihat hubungan ketiga daya tersebut. Rumus untuk daya nyata adalah perkalian antara arus dan tegangan, yaitu :
� = � × �
ϲ
Sedangkan hubungan antara daya nyata dan daya aktif dapat dihitung dengan rumus trigonometri sebagai berikut :
cos � = ��
� = � × cos �
Rumus untuk daya aktif adalah :
� = � × � × cos �
Faktor daya yang dinotasikan sebagai cos φ didefinisikan sebagai perbandingan antara arus yang dapat menghasilkan kerja didalam suatu rangkaian terhadap arus total yang masuk kedalam rangkaian atau dapat dikatakan sebagai perbandingan daya aktif (kW) dan daya semu (kVA). Daya reaktif yang tinggi akan meningkatkan sudut ini dan sebagai hasilnya faktor daya akan menjadi lebih rendah[1].
2.1.2 Biaya Pemakaian Listrik
ϳ
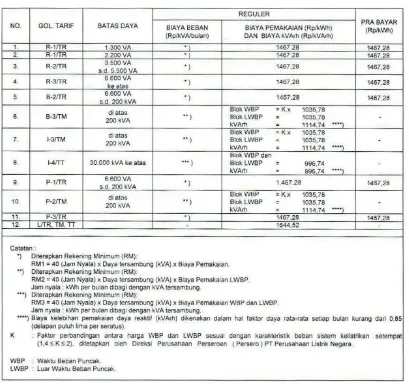
Tabel 1 Tarif Tenaga Listrik PLN Bulan Januari 2017
Sumber : www.pln.co.id
2.2 Arduino
Arduino didefinisikan sebagai sebuah platform elektronik yang open source, berbasis pada software dan hardware yang fleksibel dan mudah digunakan, yang ditujukan untuk para seniman, desainer, hobbies, dan setiap orang yang tertarik dalam membuat objek atau lingkungan yang interaktif[2].
ϴ
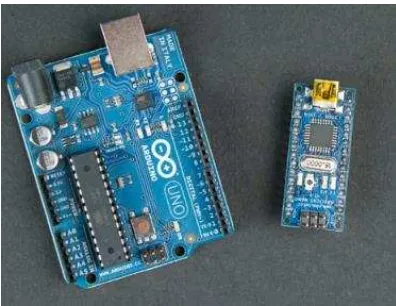
Gambar 2 Jenis-jenis Arduino
Kelebihan Arduino dari platform hardware mikrokontroler lainnya adalah:
1. IDE Arduino merupakan multiplatform, yang dapat dijalankan di berbagai sistem operasi, seperti Windows, Macintosh, dan Linux.
2. IDE Arduino dibuat berdasarkan pada IDE Processing, yang sederhana sehingga mudah digunakan.
3. Pemrograman Arduino menggunakan kabel yang terhubung dengan port USB, bukan port serial. Fitur ini berguna karena banyak komputer yang sekarang ini tidak memiliki port serial.
4. Arduino adalah hardware dan software open source. 5. Biaya hardware cukup murah.
6. Proyek Arduino ini dikembangkan dalam lingkungan pendidikan, sehingga bagi pemula akan lebih cepat dan mudah mempelajarinya.
7. Memiliki begitu banyak pengguna dan komunitas di internet yang dapat membantu setiap kesulitan yang dihadapi.
2.2.1 Bahasa Pemrograman Arduino
ϵ
pemrograman Arduino menggunakan bahasa pemrograman C++ yang dikembangkan sesuai dengan Arduino IDE (Integrated development environment).
2.2.1.1 Struktur
Setiap program dalam Arduino terdiri dari dua fungsi utama yaitu setup() dan loop(). Fungsi digambarkan sebagai kumpulan kode yang ditujukan untuk melaksanakan tugas tertentu dan kode tersebut akan dijalankan ketika nama fungsi tersebut dipanggil di dalam program[5]. Instruksi yang berada dalam fungsi setup() dieksekusi hanya sekali, yaitu ketika Arduino pertama kali dihidupkan. Biasanya instruksi yang berada pada fungsi setup() merupakan konfigurasi dan inisialisasi dari Arduino. Instruksi yang berada pada fungsi loop() dieksekusi berulang-ulang hingga Arduino dimatikan (catu daya diputus). Fungsi loop() merupakan tugas utama dari Arduino. Jadi setiap program yang menggunakan bahasa pemrograman Arduino memilliki struktur yang ditunjukkan pada Gambar 3.
Gambar 3 Struktur Umum Pemrograman Arduino
Program pada Gambar 3 dapat dianalogikan dalam bahasa pemrograman Arduino seperti ditunjukkan pada Gambar 4.
ϭϬ
2.2.1.2 Konstanta
Konstanta adalah variabel yang sudah ditetapkan sebelumnya dalam bahasa pemrograman Arduino. Konstanta digunakan agar program lebih mudah untuk dibaca dan dimengerti. Konstanta dibagi menjadi 3 kelompok yaitu:
1. Konstanta yang digunakan untuk menunjukkan tingkat logika (konstanta Boolean), yaitu true dan false.
2. Konstanta untuk menunjukkan keadaan pin, yaitu HIGH dan LOW.
3. Konstanta untuk menunjukkan fungsi pin, yaitu INPUT, INPUT_PULLUP, dan OUTPUT.
Konstanta yang digunakan untuk menunjukkan benar atau salah dalam bahasa pemrograman Arduino adalah true dan false. False didefinisikan sebagai 0 (nol). True sering didefinisikan sebagai 1(satu), namun true memiliki definisi yang lebih luas. Setiap integer yang bukan nol adalah true dalam pengertian Boolean.
Ketika membaca atau menulis ke sebuah pin digital, terdapat hanya dua nilai, yaitu HIGH dan LOW. HIGH memiliki arti yang berbeda tergantung dengan konfigurasinya. Ketika pin dikonfigurasi sebagai masukan dengan fungsi pinMode(), mikrokontroler akan melaporkan nilai HIGH jika tegangan yang ada pada pin tersebut berada pada tegangan 3 volt atau lebih. Ketika sebuah pin dikonfigurasi sebagai masukan dan kemudian dibuat bernilai HIGH dengan fungsi digitalWrite(), maka resistor pull-up internal dari chip ATmega akan aktif, yang akan membawa pin masukan ke nilai HIGH, kecuali pin tersebut ditarik (pull-down) ke nilai LOW oleh rangkaian dari luar. Ketika pin dikonfigurasi sebagai keluaran dengan fungsi pinMode() dan diatur ke nilai HIGH dengan fungsi digitalWrite(), maka pin berada pada tegangan 5 volt.
ϭϭ
sebagai masukan memiliki permintaan yang sangat kecil kepada rangkaian yang di-sampling-nya, setara dengan sebuah resistor 100 Megaohm dipasang seri dengan pin tersebut. Chip ATmega pada Arduino memiliki resisitor pull-up internal (resistor yang terhubung ke sumber tegangan secara internal) yang dapat digunakan. Untuk menggunakan resistor pull-up internal ini kita menggunakan konstanta INPUT_PULLUP pada fungsi pinMode(). Pin yang dikonfigurasi menjadi sebuah keluaran dikatakan berada dalam kondisi berimpedansi rendah.
2.2.2 Komunikasi Data 2.2.2.1 I2C
Inter Integrated Circuit (I2C) bus adalah standar antarmuka dua arah yang digunakan
sebuah pengontrol, dikenal sebagai master, untuk berkomunikasi dengan perangkat lain yang terhubung dengannya. Perangkat lain tidak dapat mengirim data sebelum perangkat tersebut diberi alamat atau sudah dikenal oleh master. Setiap perangkat yang terhubung dengan bus I2C
memiliki alamat yang spesifik untuk membedakan dengan perangkat lainnya yang terhubung dengan bus I2C yang sama.
Bentuk fisik antarmuka I2C terdiri dari jalur serial clock (SCL) dan serial data (SDA).
Keduanya harus terhubung ke Vcc (sumber tegangan) melalui sebuah resistor pull-up. Besar
resistor pull-up ditentukan oleh banyaknya kapasitas pada jalur I2C.
I2C merupakan protocol yang sangat popular dan handal yang digunakan untuk
komunikasi antar perangkat. Gambar 2.2.1 mengilustrasikan bagaimana beberapa perangkat dapat saling berbagi bus yang terhubung ke prosesor hanya melalui dua kabel dan ini merupakan suatu efisiensi yang diberikan oleh protokol ini [3].
2.2.2.2 UART
Universal Asynchronous Receiver/Transmitter (UART) adalah sebuah rangkaian terpadu
ϭϮ
antarmuka RS-232C Data Terminal Equipment (DTE) yang membuat dapat saling berkomunikasi dan bertukar data dengan perangkat serial lainnya [4].
2.3 GPRS
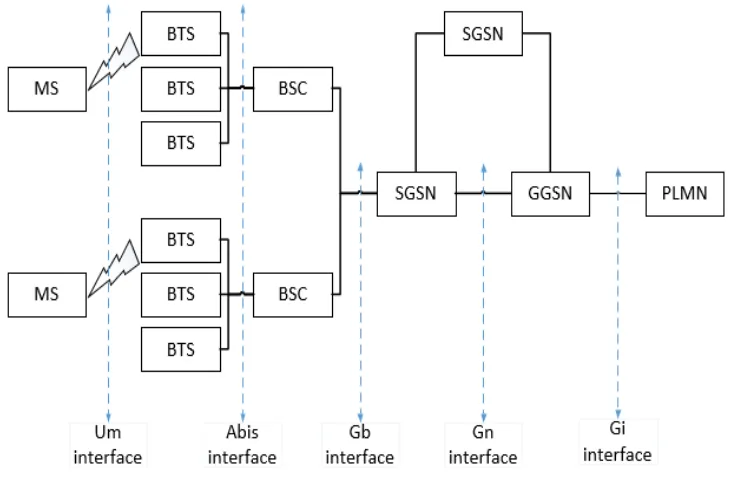
GPRS (General Packet Radio Service) merupakan salah satu metode protokol pengiriman data seluler. Pada GPRS terdapat dua elemen baru yang diperkenalkan untuk membuat mode transfer paket end-to-end. Sebagai tambahan, HLR dikembangkan dengan data pelanggan GPRS dan informasi routing. Dua layanan yang dihasilkan yaitu point-to-point (PTP) dan point-to-multipoint (MTP)[6]. Gambar 5 menunjukkan arsitektur dari GPRS.
Gambar 5 Arsitektur GPRS
Routing paket yang independen dan transfer di dalam public land mobile network
(PLMN) didukung oleh sebuah node jaringan logika yang baru yang disebut GPRS support
node (GSN). Gate-way GPRS support node (GGSN) berperilaku sebagai sebuah interface
ϭϯ
Internet Protocol (IP) digunakan sebagai backbone pengiriman PDU. Semua proses ditetapkan
sebagai tunneling pada GPRS. GGSN juga mempertahankan informasi routing yang digunakan untuk menembus PDU ke SGSN secara langsung melayani MS. Keseluruhan data pengguna yang berhubungan dibutuhkan oleh SGSN untuk menampilkan routing dan transfer data secara fungsional ke dalam HLR.
2.4 Current Transformator
Trafo Arus (Current Transformator - CT) yaitu peralatan yang digunakan untuk melakukan pengukuran besaran arus pada instalasi tenaga listrik disisi primer yang berskala besar dengan melakukan transformasi dari besaran arus yang besar menjadi besaran arus yang kecil secara akurat dan teliti untuk keperluan pengukuran dan proteksi. Current Transformator akan menurunkan arus yang masuk dengan perbandingan tertentu.[7]
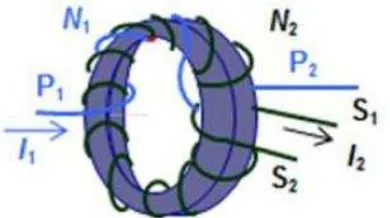
Seperti trafo yang lain, Current Transformator mempunyai lilitan primer, inti magnetik, dan lilitan sekunder. Arus bolak-balik yang Mengalir di primer menghasilkan medan magnet di inti, yang menginduksi arus di lilitan sekunder. Gambar 6 merupakan salah satu contoh Current Transformator.
ϭϰ
(5)
(6)
(7) Gambar 7 Rangkaian pada Current Transformator
Untuk trafo arus yang dihubung singkat :
� . � = � . �
Untuk trafo arus pada kondisi tidak berbeban :
� � =
� �
Dimana :
� =��
� > � sehingga � < �
� = Jumlah lilitan primer
� = Jumlah lilitan sekunder
2.5 Potential Transformator
ϭϱ
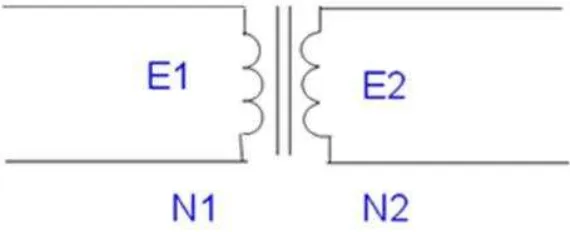
(8) lebih sedikit dibandingkan dengan jumlah lilitan primernya. Gambar 7 merupakan gambar Potential Transformator.
Gambar 8 Potential Transformator (PT) Prinsip kerja trafo tegangan adalah sebagai berikut:
Gambar 9 Prinsip Kerja Trafo Tegangan
Rumus perbandingan tegangan dengan jumlah lilitan pada te gangan :
� � =
� � = �
Dimana :
� = Perbandingan/Rasio Transformasi
ϭϲ
� = Jumlah belitan primer
� = Jumlah belitan sekunder
� = Tegangan primer