Abstrak—Banjir yang terjadi dikota-kota besar hampir datang setiap tahun, pada musim penghujan. Pada semua peristiwa banjir dibagi menjadi dua penyebab. Pertama, musibah sebagai malapetaka yang terjadi diluar kontrol manusia seperti tsunami, meluapnya air laut dan lain sebagainya. Kedua, merupakan peristiwa yang terjadi akibat kesalahan manusia sendiri. Penyebab kedua adalah penyebab banjir yang sering terjadi dikota-kota besar, yang disebabkan oleh penduduk disekitar bantaran sungai membuang sampah sembarangan sehingga menghambat aliran sungai dan menimbulkan banjir.
Jumlah kerugian yang diakibatkan banjir datang berkisar ratusan ribu hingga puluhan juta, menggenangi perumahan penduduk di dekat aliran sungai, jenis kerusakan antara lain barang elektronik, sampai merusak jalanan.
Untuk mengantisipasi datangnya banjir, maka dibutuhkan alat untuk mengukur ketinggian air sungai menggunakan mikrokontroler arduino dengan sensor ultrasonik dan motor servo. Untuk mengurangi kerugian akibat banjir maka informasi peringatan dini tentang ketinggian air yang bisa berubah sewaktu-waktu akan dikirim melalui media jejaring sosial (Twitter dan Facebook) dan broadcast Short Message Service (SMS).
Pengukuran tinggi permukaan air sungai ini dilakukan dengan menggunakan mikrokontroler arduino dengan tambahan sensor ultrasonic kemudian data yang diperoleh akan dikirim ke media jejaring social (Twitter dan Facebook) dan peringatan ketinggian air status bahaya dikirim pada perangkat mobile berupa Short Message Service (SMS). Perangkat tersebut dapat menghitung ketinggian air dengan keakuratan mencapai 91%. Perangkat lunak dapat melakukan pengiriman data ketinggian air melalui media jejaring sosial dengan kecepatan rata-rata 10 hingga 11 detik. Perangkat lunak dapat melakukan pengiriman data peringatan bahaya berupa Short Message Service (SMS) dengan kecepatan 15 hingga 30 detik.
Kata Kunci—Arduino, Banjir, Broadcast Informasi, Early Warning System
I. PENDAHULUAN
UNGAI merupakan sumber kehidupan bagi masyarakat yang hidup di sepanjang bantaran sungai dan masyarakat perkotaan. Karena air sungai tersebut diolah menjadi sumber ar bersih dan disalurkan kemasyarakat. Ketika hujan maka akan terjadi luapan air di berbagai kawasan sehingga mengakibatkan genangan air di beberapa tempat sehingga dapat mengakibatkan banjir.
Genangan air tersebut dapat diakibatkan dari pembuangan sampah kesungai oleh masyarakat yang tinggal di sekitar sungai, dan dampak dari perkembangan kawasan kota, sehingga mengakibatkan sedikitnya kawasan resapan air [1].
Akibat dari pembangunan tata ruang yang salah banyak masyarakat yang tidak lagi mempedulikan lingkungan disekitarnya. Banyak masyarakat yang membangun rumah di bantaran sungai dan membuang sampah ke sungai.
Untuk mengurangi dampak kerugian yang diakibatkan oleh genangan air tersebut maka salah satu cara adalah harus mengetahui ketinggian permukaan air. Perangkat ukur yang digunakan saat ini masih banyak yang menggunakan tanda garis yang dibuat sedemikian rupa. Jadi pada penelitian ini, dibuat suatu alat yang mampu memberi peringatan dini mengenai tinggi permukaan air sungai secara digital.
II. METODOLOGI
A. Dasar Teori
Pada bagian ini akan dijelaskan kajian pustaka atau dasar teori yang digunakan dalam menyelesaikan penelitian ini.
1) Mikrokontroler Arduino
Arduino merupakan sebuah mikrokontroler single-board
yang bersifat open-source [2]. Arduino dirancang sedemikian rupa sehingga memudahkan para penggunanya di bidang elektronika. Board Arduino didesain menggunakan processor
Atmel AVR dan mendukung I/O pada board-nya. Software
untuk Arduino terdiri dari compiler bahasa pemrograman standar dan boot-loader. Bahasa pemrograman yang digunakan adalah C. Dalam sebuah mikrokontroler Arduino dapat pula ditanamkan berbagai macam library maupun metode selama kapasitas memori dari sebuah mikrokontroler mencukupi.
Arduino juga menggunakan Integrated Development
Environment (IDE) berbasis processing dimana processing
adalah bahasa open-source untuk menuliskan program ke komputer lainnya [2]. Jika ada sebuah proyek yang memerlukan beberapa komputer untuk berkomunikasi dengan Arduino, maka processing tersebut dapat digunakan, sehingga komputer-komputer tersebut dapat saling berkomunikasi dengan Arduino. Supaya mikrokontroler Arduino dapat berfungsi, Arduino juga dapat dipasangkan dengan berbagai macam sensor. Pada artikel ini, teknologi mikrokontroler Arduino digunakan untuk mengolah data mengenai tinggi air sungai. Untuk gambar mikrokontroler Arduino dapat dilihat pada Gambar 1.
2) Sensor Ultrasonik SRF04
Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang suara dan digunakan untuk mendeteksi keberadaan suatu objek tertentu di depannya,
Peringatan Dini Mengenai Tinggi Air Sungai Melalui
Media Jejaring Sosial Menggunakan Mikrokontroler
Muhammad Luthfi Attabibi, Muchammad Husni, dan Henning Titi Ciptaningtyas
Jurusan Teknik Informatika, Fakultas Teknologi Informasi, Institut Teknologi Sepuluh Nopember
Jl. Arief Rahman Hakim, Surabaya 60111 Indonesia
: [email protected]
Gambar 1. Tampilan dari mikrokontroler Arduino
Gambar 2. Tampilan dari sensor ultrasonik
frekuensi kerjanya pada daerah di atas gelombang suara dari 40 KHz hingga 400 KHz.
Sensor ultrasonik terdiri dari dari dua unit, yaitu unit pemancar dan unit penerima. Struktur unit pemancar dan penerima sangatlah sederhana, sebuah kristal piezoelectric
dihubungkan dengan mekanik jangkar dan hanya dihubungkan dengan diafragma penggetar. Tegangan bolak-balik yang memiliki frekuensi kerja 40 KHz – 400 KHz diberikan pada plat logam. Struktur atom dari kristal piezoelectric akan berkontraksi (mengikat), mengembang atau menyusut terhadap polaritas tegangan yang diberikan, dan ini disebut dengan efek piezoelectric. Kontraksi yang terjadi diteruskan ke diafragma penggetar sehingga terjadi gelombang ultrasonik yang dipancarkan ke udara (tempat sekitarnya), dan pantulan gelombang ultrasonik akan terjadi bila ada objek tertentu, dan pantulan gelombang ultrasonik akan diterima kembali oleh oleh unit sensor penerima. Selanjutnya unit sensor penerima akan menyebabkan diafragma penggetar akan bergetar dan efek piezoelectric menghasilkan sebuah tegangan bolak-balik dengan frekuensi yang sama.
Besar amplitudo sinyal elektrik yang dihasilkan unit sensor penerima tergantung dari jauh dekatnya objek yang dideteksi serta kualitas dari sensor pemancar dan sensor penerima. Proses sensing yuang dilakukan pada sensor ini menggunakan metode pantulan untuk menghitung jarak antara sensor dengan obyek sasaran. Jarak antara sensor tersebut dihitung dengan cara mengalikan setengah waktu yang digunakan oleh sinyal ultrasonik dalam perjalanannya dari rangkaian Tx sampai diterima oleh rangkaian Rx, dengan kecepatan rambat dari sinyal ultrasonik tersebut pada media rambat yang digunakannya, yaitu udara.
Waktu dihitung ketika pemancar aktif dan sampai ada masukan dari rangkaian penerima dan bila pada melebihi batas waktu tertentu rangkaian penerima tidak ada sinyal masukan maka dianggap tidak ada halangan di depannya. Sensor ultrasonik berfungsi untuk mengukur jarak ketinggian air. Untuk gambar sensor ultrasonik dapat dilihat pada Gambar 2.
Gambar 3. Motor servo
3) Motor Servo
Motor servo adalah sebuah motor dengan sistem umpan balik tertutup, di mana posisi dari motor akan di informasikan kembali ke rangkaian control yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor DC, serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor
Karena motor DC servo merupakan alat untuk mengubah energi listrik menjadi energi mekanik, maka magnet permanen motor DC servolah yang mengubah energi listrik ke dalam energi mekanik melalui interaksi dari dua medan magnet. Salah satu medan dihasilkan oleh magnet permanen dan yang satunya dihasilkan oleh arus yang mengalir dalam kumparan motor. Resultan dari dua medan magnit tersebut menghasilkan torsi yang membangkitkan putaran motor tersebut. Saat motor berputar, arus pada kumparan motor menghasilkan torsi yang nilainya konstan.
Secara umum terdapat 2 jenis motor servo. Yaitu motor servo standar dan motor servo Continous. Servo motor tipe standar hanya mampu berputar 180 derajat. Motor servo standar sering dipakai pada sistim robotika misalnya untuk membuat “ Robot Arm” (Robot Lengan). Sedangkan Servo motor continuous dapat berputar sebesar 360 derajat. Motor servo Continous sering dipakai untuk Mobile Robot. Pada badan servo tertulis tipe servo yang bersangkutan. Motor servo berfungsi untuk menggerakkan palang pintu air, motor servo dapat bergerak membuka dan menutup palang pintu air. Untuk gambar motor servo dapat dilihat pada Gambar 3.
4) Gammu
Gammu adalah service yang disediakan untuk membangun aplikasi yang berbasis SMS gateway. SMS gateway adalah sebuah gerbang yang menghubungkan antara komputer dengan client melalui SMS. Client secara tidak langsung berinteraksi dengan aplikasi atau sistem melalui SMS
gateway. Saat melakukan SMS informasi terpenting yang
diperlukan adalah nomor tujuan dan pesan, maka itu yang sebenarnya diolah oleh SMS gateway adalah kedua data tersebut.
Gammu digunakan untuk membangun aplikasi SMS
gateway dengan bahasa program atau platform apapun. Baik
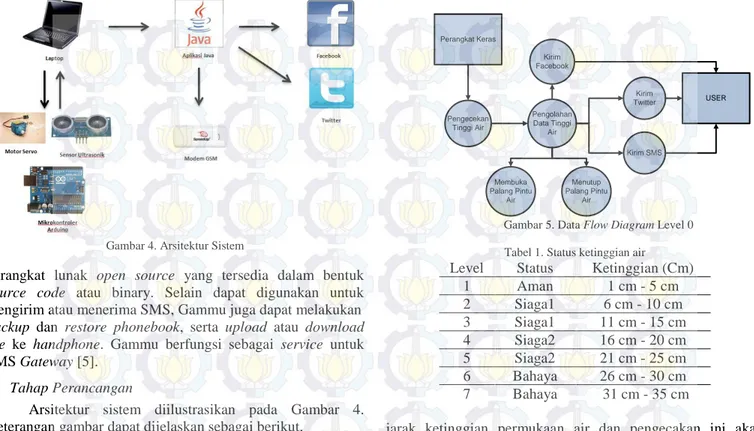
Gambar 4. Arsitektur Sistem
perangkat lunak open source yang tersedia dalam bentuk
source code atau binary. Selain dapat digunakan untuk
mengirim atau menerima SMS, Gammu juga dapat melakukan
backup dan restore phonebook, serta upload atau download
file ke handphone. Gammu berfungsi sebagai service untuk
SMS Gateway [5].
B. Tahap Perancangan
Arsitektur sistem diilustrasikan pada Gambar 4. Keterangan gambar dapat dijelaskan sebagai berikut.
1. Perangkat modul Arduino mendeteksi ketinggian air dan kemudian mengirim data ke laptop/PC.
2. Laptop/PC mengolah data menggunakan NetBeans dengan bahasa pemograman Java. Data tersebut diolah menjadi beberapa level, level 1 dikategorikan status Bahaya, level 2 dikategorikan status Siaga2, level 3 dikategorikan status Siaga1, dan level 4 dikategorikan status Aman.
3. Data yang sudah diolah akan dikirimkan ke Facebook. Data yang dikirimkan adalah jika data tersebut mengalami perubahan status, misal dari status Aman berubah ke status Siaga1, Siaga2, dan Bahaya atau sebaliknya.
4. Data yang sudah diolah akan dikirimkan ke Twitter. Data yang dikirimkan adalah jika data tersebut mengalami perubahan status, misal dari status Aman berubah ke status Siaga1, Siaga2, dan Bahaya atau sebaliknya.
5. Jika data ketinggian air dalam status Bahaya maka peringatan akan dikirimkan melalui SMS Gateway.
6. Selain mengirimkan data dengan status Bahaya melalui SMS Gateway, perangkat mikrokontroler Arduino juga akan melakukan aksi yaitu membuka palang pintu air. Jika status sudah tidak lagi berbahaya maka palang pintu air akan kembali menutup.
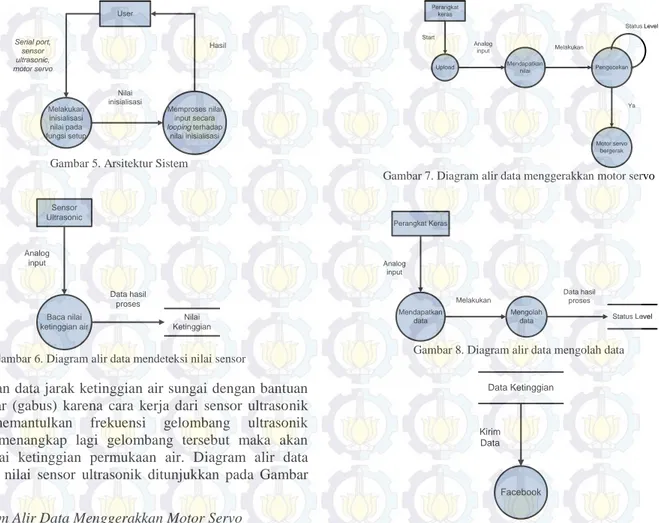
Diagram alir data level 0 merupakan alir dengan tingkat tertinggi dalam DFD. Seluruh entitas eksternal yang ditampilkan berikut aliran-aliran data utama menuju dan dari sistem. Selain itu diagram alir level 0 menggambarkan fungsionalitas sistem besarta aktor yang terlibat. Diagram alir level 0 pada penelitian ini direpresentasikan oleh Gambar 5.
Sistem diawali dari perangkat mikrokontroler Arduino dengan sensor ultrasonik, sensor ultrasonik akan mendapatkan
Perangkat Keras Pengecekan Tinggi Air Pengolahan Data Tinggi Air Kirim Facebook Kirim Twitter USER Kirim SMS Membuka Palang Pintu Air Menutup Palang Pintu Air
Gambar 5. Data Flow Diagram Level 0 Tabel 1. Status ketinggian air Level Status Ketinggian (Cm)
1 Aman 1 cm - 5 cm 2 Siaga1 6 cm - 10 cm 3 Siaga1 11 cm - 15 cm 4 Siaga2 16 cm - 20 cm 5 Siaga2 21 cm - 25 cm 6 Bahaya 26 cm - 30 cm 7 Bahaya 31 cm - 35 cm
jarak ketinggian permukaan air dan pengecakan ini akan dilakukan secara terus-menerus sampai waktu yang ditentukan.
Setalah melakukan pengecekan tinggi permukaan air selanjutnya proses yang dilakukan adalah mengolah data tinggi air, mengolah data menjadi beberapa status level tergantung terhadap ketinggian air. Status level dikategorikan menjadi status Aman, Siaga1, Siaga2, dan Bahaya. Untuk lebih jelasnya status ketinggian air dapat dilihat pada Tabel 1. Setiap pergantian status level data tersebut akan dikirim melalui jejaring sosial seperti Facebook dan Twitter. Apabila status level menunjukan status Bahaya maka data tersebut tetap dikirim melalui jejaring sosial dan ditambah dengan mengirimkan peringatan berupa pesan melalui SMS terhadap masyarakat yang tinggal di bantaran sungai dengan SMS
Gateway. Selain itu perangkat mikrokontroler Arduino yang
sudah ditambahkan motor servo akan melakukan aksi yaitu membuka palang pintu air.
III. PERANCANGAN DAN DESAIN SISTEM
A. Diagram Alir Data Inisialisasi Arduino
Ketika Arduino dinyalakan pertama kali, Arduino akan melakukan inisialisasi pada fungsi setup. Apapun yang diinisialisasikan pada fungsi setup ini hanya dilakukan sekali ketika Arduino pertama kali dijalankan. Pada proses tersebut, Arduino akan mengatur setting serial port dan inisialisasi metode yang akan digunakan untuk proses pendeteksian serta penentuan ketinggian permukaan air pada proses selanjutnya. Diagram alir data inisialisasi Arduino ditunjukkan pada Gambar 5.
B. Diagram Alir Data Mendeteksi Nilai Sensor Ultrasonik
Pada bagian ini akan dijelaskan mengenai pendektesian nilai sensor ultrasonik. Proses ini diawali sensor ultrasonik
User Melakukan inisialisasi nilai pada fungsi setup Serial port, sensor ultrasonic, motor servo Memproses nilai input secara looping terhadap nilai inisialisasi Nilai inisialisasi Hasil
Gambar 5. Arsitektur Sistem
Sensor Ultrasonic Baca nilai ketinggian air Analog input Nilai Ketinggian Data hasil proses
Gambar 6. Diagram alir data mendeteksi nilai sensor
mendapatkan data jarak ketinggian air sungai dengan bantuan bidang datar (gabus) karena cara kerja dari sensor ultrasonik dengan memantulkan frekuensi gelombang ultrasonik kemudian menangkap lagi gelombang tersebut maka akan didapat nilai ketinggian permukaan air. Diagram alir data mendeteksi nilai sensor ultrasonik ditunjukkan pada Gambar 6.
C. Diagram Alir Data Menggerakkan Motor Servo
Pada bagian ini akan dijelaskan mengenai alur sistem untuk menggerakkan motor servo. Motor servo sendiri berfungsi sebagai motor atau alat untuk membuka atau menutup pintu palang air. Proses ini diawali mikrokontroler Arduino atau bisa disebut perangkat keras meng-upload untuk menjalankan program, kemudian mendapatkan nilai ketinggian permukaan air setelah itu melakukan pengecekan jika status level masih dalam status Aman, Siaga1, dan Siaga2 maka posisi motor servo masih dalam keadaan tertutup dan bisa dikatakan dalam posisi normal, tetapi jika pengecekan status level sudah dalam status Bahaya maka motor servo akan membuka pintu palang air tersebut. Diagram alir data menggerakkan motor servo ditunjukkan pada Gambar 7.
D. Diagram Alir Data Mengolah Data
Pada bagian ini akan dijelaskan mengenai alur sistem untuk mengolah data. Yang dimaksudkan mengolah data di sini yaitu mengolah data ketinggian permukaan air. Proses ini diawali mikrokontroler Arduino atau bisa disebut perangkat keras meng-upload untuk menjalankan program, kemudian mendapatkan nilai ketinggian permukaan air. Setelah mendapatkan data ketinggian air maka proses yang dilakukan selanjutnya adalah mengolah data. Mengolah data ini dikategorikan menjadi beberapa status level, Status level Aman, Siaga1, Siaga2, dan Bahaya. Status Bahaya adalah status di mana jarak antara sensor ultrasonik sudah sangat dekat dengan permukaan air, diharapkan masyarakat sekitar bantaran sungai untuk mengungsi atau pindah ketempat yang
Perangkat keras Upload Mendapatkan nilai Pengecekan Motor servo bergerak Start Melakukan Ya Analog input Status Level
Gambar 7. Diagram alir data menggerakkan motor servo
Perangkat Keras
Mendapatkan data
Mengolah
data Status Level Analog
input
Melakukan
Data hasil proses
Gambar 8. Diagram alir data mengolah data
Data Ketinggian
Facebook Kirim Data
Gambar 9. Diagram alir data pengiriman data melalui facebook yang lebih aman. Status Siaga2 adalah status di mana jarak antara sensor ultrasonik dengan permukaan air sudah sangat dekat, diharapkan masyarakat sekitar bantaran sungai untuk lebih waspada dan berhati-hati. Status Siaga1 dan Aman adalah status di mana jarak antara sensor ultrasonik dengan permukaan air masih dalam batas wajar atau batas normal. Diagram alir data mengolah data ditunjukkan pada Gambar 8.
E. Diagram Alir Data Pengiriman Data Melalui Facebook
Pada bagian ini akan dijelaskan mengenai alur sistem pegiriman data ke Facebook. Data ketinggian permukaan air ini dikirim melalui jejaring sosial agar masyarakat luas mengetahui informasi ketinggian permukaan air pada sungai-sungai tertentu yang terdapat mikrokontroler Arduino ini, dan dapat mengingatkan satu sama lain agar lebih berhati-hati terhadap bahaya banjir. Proses ini diawali data ketinggian yang telah didapat. Data yang didapat berupa status level, Status Aman, Siaga1, Siaga2, dan Bahaya. Jadi setiap perpindahan status maka data tersebut akan dikirim melalui jejaring sosial (Facebook). Diagram alir data pengiriman data ke Facebook pada Gambar 9.
F. Diagram Alir Data Pengirian Data Melalui Twitter
Pada bagian ini akan dijelaskan mengenai alur sistem pegiriman data ke Twitter. Data ketinggian permukaan air ini dikirim melalui jejaring sosial agar masyarakat luas mengetahui informasi ketinggian permukaan air pada sungai-
Data Ketinggian
Twitter Kirim Data
Gambar 10. Diagram alir data pengiriman data melalui twitter sungai tertentu yang terdapat mikrokontroler Arduino ini, dan dapat mengingatkan satu sama lain agar lebih berhati-hati terhadap bahaya banjir. Proses ini diawali data ketinggian yang telah didapat. Data yang didapat berupa status level, Status Aman, Siaga1, Siaga2, dan Bahaya. Jadi setiap perpindahan status maka data tersebut akan dikirim melalui jejaring sosial (Twitter). Diagram alir data pengiriman data ke Twitter pada Gambar 10.
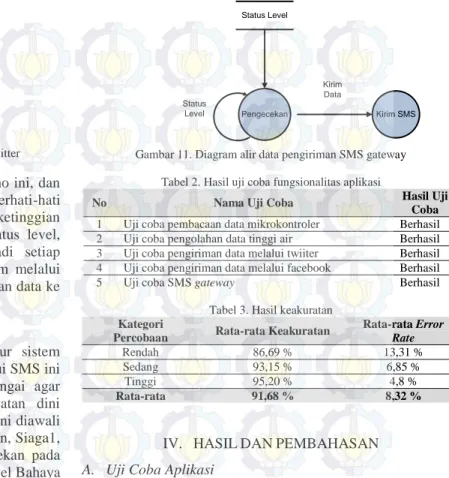
G. Diagram Alir Data Pengiriman SMS Gateway
Pada bagian ini akan dijelaskan mengenai alur sistem pengiriman SMS Gateway. Pengiriman pesan melalui SMS ini ditujukan kepada masyarakat sekitar bantaran sungai agar lebih cepat mendapatkan informasi atau peringatan dini mengenai ketinggian permukaan air sungai. Proses ini diawali dengan status level yang didapat, seperti status Aman, Siaga1, Siaga2, dan Bahaya. Kemudian dilakukan pengecekan pada status level tersebut, jika status level berada pada level Bahaya maka sistem akan melakukan pengiriman pesan melalui SMS kepada nomer yang telah didaftar yang berisikan tentang peringatan ketinggian air sungai yang sudah memasuki status level Bahaya atau sudah dalam keadaan tidak Aman lagi. Diagram alir data pengiriman SMS Gateway pada Gambar 11.
1) Lingkungan Uji Coba
Uji coba dilakukan pada sebuah bak air untuk uji coba sensor ketinggian air. Perangkat sensor diletakkan diatas pipa berukuran 42 cm dan pipa diberi pelampung setebal 1 cm. Pada uji coba ini, air dialirkan dengan selang air melalui sensor kecepatan air untuk mengetahui kecepatan air yang didapat dari sensor. Air yang melewati sensor kecepatan air dialirkan ke dalam bak air untuk mengisi bak. Ketinggian dari bak air didapatkan seiring ketinggian pelampung yang ada dalam pipa. Kedua sensor tersebut dihubungkan ke mikrokontroler Arduino. Sedangkan mikrokonroler Arduino dihubungkan dengan aplikasi pada laptop dengan media kabel USB. Untuk lingkungan uji coba memiliki spesifikasi sebagai berikut.
Bak air dengan tinggi 33 cm
Perangkat sensor (mikrokontroler Arduino, sensor ultrasonik, motor servo, breadboard, satu set kabel jumper, kabel USB)
Pipa air Selang air
Modem GSM Huawei e220
Alat ukur penggaris
Notebook TOSHIBA L510 Intel Core i3 CPU M330 2.13
GHZ dengan RAM 2.00 GB DDR3 Status Level Pengecekan Kirim SMS Kirim Data Status Level
Gambar 11. Diagram alir data pengiriman SMS gateway Tabel 2. Hasil uji coba fungsionalitas aplikasi
No Nama Uji Coba Hasil Uji
Coba 1 Uji coba pembacaan data mikrokontroler Berhasil 2 Uji coba pengolahan data tinggi air Berhasil 3 Uji coba pengiriman data melalui twiiter Berhasil 4 Uji coba pengiriman data melalui facebook Berhasil
5 Uji coba SMS gateway Berhasil
Tabel 3. Hasil keakuratan Kategori
Percobaan Rata-rata Keakuratan
Rata-rata Error Rate Rendah 86,69 % 13,31 % Sedang 93,15 % 6,85 % Tinggi 95,20 % 4,8 % Rata-rata 91,68 % 8,32 %
IV. HASILDANPEMBAHASAN
A. Uji Coba Aplikasi
Pada bagian ini akan dilakukan pengujian pada perangkat lunak yang telah dikembangkan. Adapun bentuk pengujian yang dilakukan dapat dijelaskan sebagai berikut.
1) Uji Coba Fungsionalitas
Pada uji coba fungsionalitas dilakukan pengujian pada sistem yang telah dikerjakan dan dianalisa hasilnya. Pada Tabel 1 akan diperlihatkan macam-macam uji coba yang fungsionalitas yang telah dilakukan.
Dari hasil uji coba pada Tabel 2 dapat dianalisa bahwa semua fitur yang terdapat pada sistem pendeteksi dini banjir menggunakan sensor kecepatan air dan ketinggian air pada mikrokontroler Arduino berhasil diimplementasikan. Dari segi uji coba fungsionalitas dan tingkat keberhasilan dari uji coba ini dapat dikatakan aplikasi berjalan dengan baik.
2) Uji Coba Performa Akurasi
Dari percobaan dengan tiga kategori yang sudah dilakukan, dapat diketahui bahwa penggunaan sensor ultrasonik untuk mendeteksi ketinggian air kurang akurat. Dari beberapa kali percobaan di tiga kategori yang berbeda, perbedaan hasil tiap kategorinya tidak terlalu signifikan. Data keakuratan tiap kategorinya dapat dilihat pada Tabel 3. Dapat disimpulkan bahwa sensor tidak mampu membaca dengan pasti ketinggian air. Namun secara perhitungan, mikrokontroler Arduino mampu menghasilkan perhitungan dengan tingkat akurasi yang tinggi yaitu sebesar 91%.
3) Uji Coba Performa Kecepatan Pengiriman Data
Pada uji coba ini aplikasi ini aplikasi akan mengirimkan data sebanyak 10 kali pengiriman. Uji coba ini dilakukan untuk mengetahui tingkat kesuksesan dalam pengiriman data
untuk mengetahui waktu kirim dari aplikasi ke server. Dari hasil uji coba didapatkan rentang waktu pengiriman data dari aplikasi ke server berkisar antara 10 hingga 11 detik.
4) Uji Coba Performa Kecepatan Pengiriman SMS
Dari hasil uji coba dapat disimpulkan aplikasi SMS
gateway dapat berjalan sebagaimana mestinya. Sistem dapat
mengirimkan SMS secara otomatis saat indikator marker
berwarna merah dengan artian ketinggian air sudah melewati batas aman. Waktu yang dibutuhkan untuk melakukan pengiriman selama 30 detik.
V. KESIMPULAN
Selama pengerjaan artikel ini, dapat diperoleh beberapa kesimpulan sebagai berikut.
1) Perangkat keras mikrokontroler Arduino, sensor ultrasonik, dan motor servo dapat digunakan untuk mendeteksi jarak atau ketinggian air dan motor servo dapat digunakan untuk membuka atau menutup layaknya palang pintu yang sebenarnya, perangkat tersebut dapat menghitung ketinggian air dengan keakuratan mencapai 91%.
2) Perangkat lunak dapat melakukan pengiriman data ketinggian air. Data yang sudah diolah atau sudah dikategorikan berdasarkan status ketinggiannya seperti status Aman, Siaga1, Siaga2, dan Bahaya dapat dikirim melalui jejaring sosial (Twitter dan Facebook) dengan kecepatan rata-rata 10 hingga 11 detik.
3) Perangkat lunak dapat mengirimkan pesan singkat berupa SMS. Pesan berisi peringatan untuk segera mengungsi atau pindah ke tempat lebih aman. Pesan tersebut dikirimkan apabila ketinggian air sudah melebihi batas aman atau dalam kategori status Bahaya dengan kecepatan pengiriman rata-rata 30 detik hingga 1 menit.
UCAPAN TERIMA KASIH
Penulis M.L.A. mengucapkan terima kasih kepada Tuhan Yang Maha Esa, karena hanya dengan karunia, rahmat, dan hidayah-Nya penulisan artikel ini dapat terselesaikan dengan baik. Penulis juga mengucapkan terima kasih kepada semua pihak yang terkait dalam penyelesaian penulisan artikel ini.
DAFTAR PUSTAKA
[1] M. F. Naufal, “MFNST,” [Online]. Available: http://ini-robot.com/2011/10/sensor-jarak-ultrasound-ping.html. [Diakses 13 April 2013].
[2] “Arduino,” [Online]. Available: http://www.arduino.cc/. [Diakses 7 Maret 2013].
[3] P. Parallax, “Parallax Inc.,” [Online]. Available: http://www.parallax.com/Portals/0/Downloads/docs/prod/acc/28015-PING-Sensor-Product-Guide-v2.0.pdf. [Diakses 13 April 2013]. [4] Kodoatie, Sugiyanto R. Beberapa Penyebab Banjir dan Metode
Pengendaliannya Dalam Perspektif Lingkungan. Yogyakarta: Pustaka Pelajar, 2001.
[5] Aswandi, 2010. [Online]. Available:
http://aswandi.or.id/2010/04/09/install-service-dan-start-gammu-untuk-sms-gateway\. [Diakses 30 Mei 2013].