102
Pemboran Sumur Geothermal Field X
Bambang Yudho Suranta1, Faishal Hafizh21,2
STEM Akamigas, Jl.Gajah Mada No.38, Cepu E-mail: [email protected]
ABSTRAK
Pemboran sumur Geothermal Field X bertujuan untuk memperoleh fluida panas bumi dari reservoir bersuhu tinggi (260 - 295°C) yang akan dimanfaatkan untuk pengembaangan Pembangkit Listrik Tenaga Panas bumi (PLTP). Sumur dibor berarah dengan target reservoir pada masing-masing kedalaman tegak, yaitu 1558 m, 1904 m, 2215 m, 2413 m. Pemboran berarah menggunakan mud motor yang bekerja dengan kombinasi slide (tanpa memutar rangkaian) dan rotate (memutar rangkaian), dan measure while driilling (MWD) yang berfungsi sebagai alat survei selama mengebor. Hasil survei MWD digunakan untuk menghitung trajectory pemboran dengan menggunakan metode
minimum of curvature. Kemudian hasil trajectory pemboran dengan desain trajectory dibandingkan, apabila penyimpangan terhadap target masih dalam toleransi radius 50 m, maka pemboran dapat dikatakan berhasil. Analisis menggunakan software menunjukkan bahwa penyimpangan trajectory
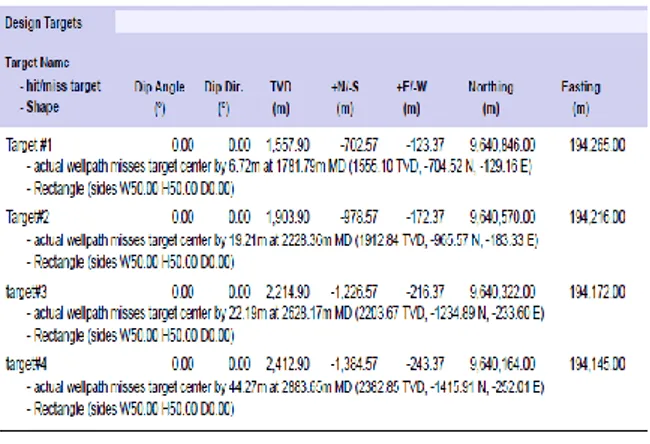
pemboran terhadap target reservoir adalah 6.72 m pada kedalaman terukur 1781.79, 19.21 m pada kedalaaman terukur 2228.36 m, 22.19 m pada kedalaman terukur 2628.17 m, 44.27 m pada kedalaman terukur 2883.65 m. Dari hasil tersebut dapat dilihat penyimpangan semakin besar pada trayek 9 7/8” dimana mud motor dan MWD tidak digunakan. Apabila digunakan rangkaian rotary steerable pada trayek tersebut, maka besar inklinasi dapat dikontrol sehingga penyimpangan trajectory lebih kecil.
Kata kunci: trajectory, minimum of curvature, rotary steerable, slide and rotate
ABSTRACT
Geothermal drilling in field X aim to obtain geothermal fluid of the high temperature reservoir (260-295°C) and utilize it for development of steam electricity power plant. The well is drilled directionally with reservoir target at depth 1558 mTVD, 1904 mTVD, and 2413 mTVD. The output of MWD survey is used to calculate actual trajectory with minimum of curvature methode, the result will be compared with trajectory design. If the result shows the deviation within radius of tolarance 50 m, it can be considered hit target successfully. Software analysis gives the result that trajectory deviation is 6.72 m at depth 1781.79, 19.21 m at depth 2228.36, 22.19 m at depth 2628.17 m, 44.27 m at depth 2883.65 m. The deviation gets bigger in the 9 7/8” hole traject where mud motor and MWD are not used. If rotary steerable assembly is used, by controlling the inclination happened, trajectory deviations become smaller.
Key words : trajectory, minimum of curvature, rotary steerable, slide and rotate
1. PENDAHULUAN
Berdasarkan analisis data eksplorasi permukaan dan bawah permukaan dari sumur yang ada, model konseptual panas bumi daerah Hululais dihasilkan oleh vulka-nisme muda yang berkembang di sepanjang Suban Gregok dan Suban Agung yang
meru-pakan deretan pegunungan vulkanik yang berasosiasi dengan patahan besar Sumatera berarah Barat Laut-Tenggara. Fluida geo-thermal naik ke permukaan mengikuti per-meabilitas yang berkembang di sepanjang jalur patahan tersebut dan bergerak ke arah timur pada elevasi yang lebih rendah.
Berda-103
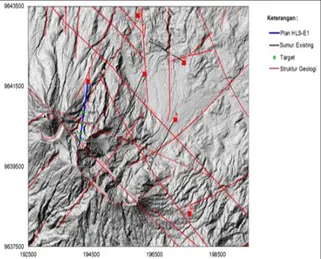
sarkan model geofisika MT-resistivity ke-mungkinan reservoir dicapai pada kedala-man 1500 mMD. Sistem panas bumi Hululais berupa dominasi air dengan temperatur reservoir berkisar 270-290°C. Target utama pemboran sumur HLS-E1, yaitu target reservoir dalam yang diper-kirakan akan ditemukan pada kedalaman 1780 mMD/1558 mKT, dan struktur geologi pada kedalaman 2225 mMD/1904 mKT, 2625 mMD/2215 mKT, 2880 mMD/2413 mKT.
Gambar 1. Peta Arah Sumur HLS-E16)
Untuk mendapatkan fluida panas bumi netral dari target reservoir pada kedalaman 3200 mMD, pemboran harus mengenai tar-get yang telah ditentukan oleh geologist dengan merencanakan pemboran berarah pada kedalaman titik belok (kick off point) 330 mMD, azimuth N190°E, build up rate 1.75°/30 m dan sudut inklinasi 39°. Posisi keempat target kedalaman yang dituju, yaitu target satu kedalaman 1558 mTVD dengan koordinat north 9640846 m dan east 194265 m, target dua kedalaman 1904 mTVD dengan koordinat north 9640570 m dan east 194216 m, target tiga kedalaman 2215 mTVD dengan north 9640322 m dan east 194172 m, dan target empat kedalaman 2413 mTVD dengan north 9640164 m dan east 194145 m. Well data dapat diketahui lebih rinci pada Tabel 1.
Pada saat dilakukan pemboran berarah, penyimpangan trajectory dapat terjadi kare-na faktor mekanis dan kekerasan formasi.
Tabel 1. Well Data6) Hululais Well Data
Nama Lokasi Hululais
Nama Sumur HLS-E1
Lokasi Bengkulu
Operator PT.Geothermal Energy Area Hululais
Menara Bor PDSI N110/M3
Tujuan
Pemboran Pemboran Sumur Pengembangan
Klasifikasi Eksplorasi
Jenis
Pemboran Pemboran Berarah
Koordinat Permukaan (program) X = 194388.37 mE Y = 9641548.57 mN Koordinat Bawah Permukaan (program) X = 194108.63 mE Y = 9639921.21 mN Koordinat Bawah Permukaan (actual) X = 453.903,1 mE, Y = 9.414.952.26 mN Ground Level 1397.5 m Tinggi Lantai Bor 9.4 m
Waktu Tajak 28 November 2015, 00:00 WIB
Akhir
Pemboran 21 April 2016, 00:00 WIB
Kedalaman Akhir 3200 mMD Titik Belok 330 mMD Arah Lubang N 190 º E Sudut Kemiringan 39º (program) 40.59 (actual) Horizontal Displacement ± 1604.29 meter (program) ± 1651.23 meter (actual) Kedalaman Target (Program) Target 1:1783.33 mMD/1558 mTVD Target 2:2228.55 mMD/1904 mTVD Target 3:2628.73 mMD/2215 mTVD Target 4:2883.51 mMD/2413 mTVD
Metode pemboran secara slide dan rotate juga mempengaruhi directional con-trol yang akan menyesuaikan arah lubang bor dengan trajectory yang direncanakan. Untuk mengetahui apakah pemboran berarah optimum atau tidak, maka perlu dihitung selisih antara target dengan actual trajectory dengan batas radius toleransi 50 m ( rec-tangle shape). Selain itu, pada pengoperasian pemboran berarah sumur Geothermal lapa-ngan X terjadi hole problem yang kemung-kinan disebabkan karena deviation control yang kurang baik. Oleh karena itu, hole problem pada trayek tertentu yang berkaitan dengan deviation control.
104
Teori yang mendasari dari pemboran sumur Geothermal lapangan X adalah bagaimana trajectory pemboran berarah itu diapli-kasikan. Perencanaan desain trajectory, ada dua dimensi yang diperhatikan, yaitu keda-laman dan jarak horizontal. Besar radius of curvature ditentukan berdasarkan nilai build up rate (BUR). Kalkulasi Survei dengan Metode Minimum of Curvature.
A. Tipe Trajectory Pemboran Berarah
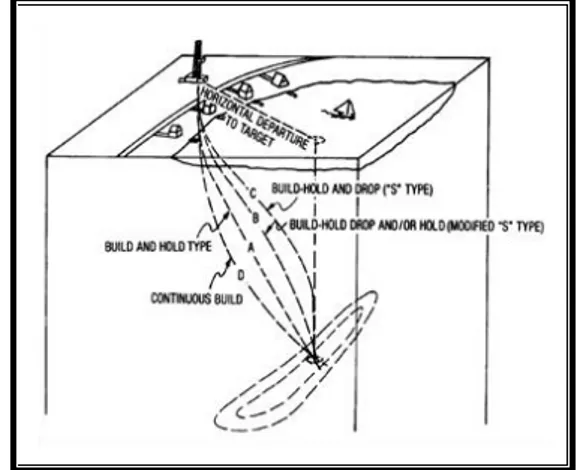
Tipe trajectory pemboran berarah umumnya dibagi menjadi tiga tipe, yaitu continous build, build and hold, dan build- hold and drop. Pembentukan sudut pada tipe trajectory continous build dilakukan setelah titik belok (kick off) dan terus dilakukan hingga mencapai sasaran. Sedangkan pada tipe build and hold setelah titik belok dila-kukan pemboran dengan dua bentuk lintasan, yaitu lintasan pertama untuk membentuk sudut (build section), kemudian lintasan untuk mempertahankan sudut (hold section). Tipe trajectory build-hold and drop memi-liki bentuk trajectory yang sama dengan build and hold, tetapi pada jarak tertentu setelah hold section lintasan dikembalikan ke arah vertikal. Untuk lebih jelasnya tipe trajectory dapat dilihat pada Gambar 2.
Gambar 2. Tipe Trajectory Pemboran Berarah2)
B. Penentuan Deviasi Horizontal dan Sudut Arah
Dalam merencanaan desain trajectory, hanya ada dua dimensi yang diperhatikan, yaitu kedalaman dan jarak horizontal. Jarak
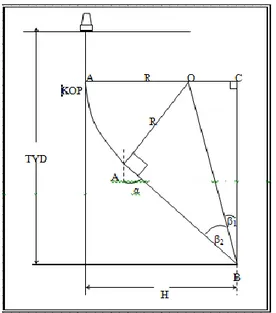
antara dasar lubang dan sumbu vertikal yang dinamakan deviasi horizontal. Arah dari lubang bor ditunjukkan oleh sudut arah (β) yang dibentuk oleh arah utara selatan dan proyeksi deviasi horizontal. Titik lokasi maupun target akan terbagi menjadi komponen X dan Y yang menyatakan jarak terhadap sumbu arah. Untuk lebih jelasnya dapat dilihat pada Gambar 3.
Gambar 3. Deviasi Horizontal dan Sudut Arah2)
Sin β = X/H, X = H sin β...(1) Cosβ = Y/H, Y = H cos β...(2) Jarak dari W sumbu utara – selatan adalah Y atau arah north-east, dan jarak W ke sumbu timur – barat adalah X atau south-west.
C. Penentuan Radius of Curvature
Radius of curvature adalah jari-jari pem-belokkan yang dapat dicapai dengan sudut inklinasi maksimum dan diukur mulai dari KOP sampai EOB. Besar radius of curva-ture ditentukan berdasarkan nilai build up rate (BUR). Pada pemboran berarah BUR tidak boleh melebihi dog leg yang telah di-tentukan, karena dapat menyebabkan pro-blem pemboran.
R =
x
...(3) Panjang busur yang dibuat oleh radius R (jarak antara KOP ke titik C) dengan notasi L, adalah sebagai berikut :L = θ
105 D. Penentuan Sudut Inklinasi Jika R>H
Pada Gambar 4 diterangkan tentang profil sumur berarah ketika R > H, yang berarti radius pembelokan lebih besar dari pada penembusan kearah horizontal, akan meng-hasilkan sudut inklinasi (θ) lebih kecil. Dari gambar tersebut dapat dicari nilai θ dengan menggunakan persamaan berikut:
θ = arc tan
(
)
– arc cos,( ) ( ) -...(5)Gambar 4. Profil Sumur jika R > H 2) E. Penentuan Sudut Inklinasi Jika R<H
Pada gambar 5. diterangkan tentang profil sumur berarah ketika R < H, yang berarti radius pembelokan lebih kecil dari pada penembusan kearah horizontal, akan meng-hasilkan sudut inklinasi (θ) lebih besar. Dari gambar tersebut dapat diturunkan persa-maan-persamaan sebagai berikut.
θ = 180° - arctan
(
)
-arctan
(
√)
..(6)Gambar 5. Profil Sumur jika R<H 2)
F. Pemilihan Konfigurasi Build Up Rate Pengaturan posisi downhole motor dan stabilizer serta besar sudut bent-housing dan bent-sub akan memberikan efek pada pem-bentukan besar build rate yang ingin dicapai. Pada teori penggunaan motor dalam sudut terdapat dua geometri motor yang biasa digunakan, yaitu geometri motor tipe 1 dan geometri motor tipe 2. Gambar 6 memper-lihatkan geometri motor tipe 1. Persamaan-persamaan yang dapat digunakan untuk me-nentukan besar build up rate dari suatu kombinasi BHA adalah sebagai berikut.
BUR = ...(7) Φ = B’ – B1 – B2...(8) * +...(9) * +...(10)
106 G. Kalkulasi Survei dengan Metode
Minimum of Curvature
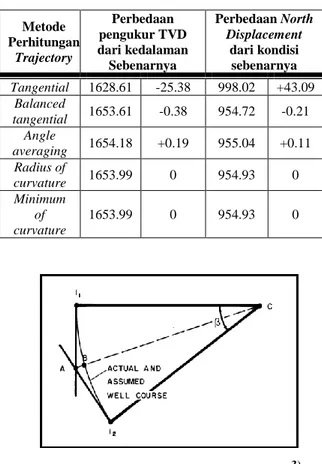
Setelah perencanaan.dibuat dan praktek pemboran berarah dilaksanakan, survei dila-kukan pada kedalaman tertentu untuk mengetahui sudut kemiringan dan arah lubang bor. Apabila pada titik survei tersebut terjadi penyimpangan, lubang bor diarahkan kembali ke arah yang telah ditetapkan. Ada beberapa metode yang dapat menentukan titik koordinat ini, dimana masing-masing metode mempunyai asumsi dan batasan-batasan tertentu didalam menganalisa persoalan. Metode yang paling akurat dan sering digunakan di lapangan adalah minimum of curvature.
Tabel 1. Metode Perhitungan Trajectory 2) Metode Perhitungan Trajectory Perbedaan pengukur TVD dari kedalaman Sebenarnya Perbedaan North Displacement dari kondisi sebenarnya Tangential 1628.61 -25.38 998.02 +43.09 Balanced tangential 1653.61 -0.38 954.72 -0.21 Angle averaging 1654.18 +0.19 955.04 +0.11 Radius of curvature 1653.99 0 954.93 0 Minimum of curvature 1653.99 0 954.93 0
Gambar 7. Minimum of Curvature 3) Keakuratan metode minimum of curva-ture dibandingkan metode yang lainnya terhadap kondisi sebenarnya dicontohkan pada Tabel 1. Metode tersebut mengasum-sikan lubang bor antara dua titik survei berbentuk kurva yang ditunjukkan dengan Gambar 7. Persamaan untuk metode
minimum of curvature adalah sebagai berikut.
ΔTVD =
x (cosI1 + cosI2)
x FC + TVD1...(9)
Northing =
x
[(sinI2 x cosA2)+(sinI1 x cosA1)] x FC ...(10)
Easting = x [(sinI2 x sinA2) +
(sinI1 x sinA1)] x FC...(11)
D1 = cos(I2 – I1) – {sinI2 x sinI1 x
[1 – cos (A2 –cosA1)]}...(12)
D2 = arctan √( )
...(13)
FC = 2/D2 x tan.radian(D2/2)...(14) H. Dog Leg Severity
Dog leg severity didefinisikan sebagai gabungan dari perubahan kedua sudut lubang bor pada arah tegak dan mendatar untuk selang kedalaman ukur tertentu, yang biasanya diambil tiap 100 feet atau 30 meter. Kejadian dog leg di dalam lubang bor sebenarnya suatu problem yang tidak dapat dihindarkan, hanya masalahnya adalah mencegah terbentuknya dog leg yang terlalu tajam. Sebab sebagian problem lubang disebabkan oleh dog leg ini, misalnya sulit memasukkan alat logging, key seating, fatigue failure untuk drill pipe dan drill collar, timbulnya drag, kerja yang berlebihan pada casing, drill pipe, drill collar dan alat produksi karena tension yang tinggi. Secara empiris persamaan dog leg severity dapat dicari dengan menggunakan persamaaan sbb:
δ =[ arc cos x (cosΔA x sinI2 x sinI1 +
107 2. METODE
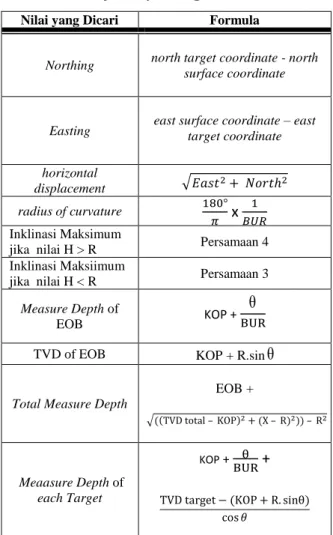
Langkah awal dalam membuat desain trajectory adalah mengumpulkan data yang dibutuhkan, yaitu surface coordinate, target coordinate, kedalaman tegak (TVD) target, kedalaman KOP, azimuth target, dan laju pembentukan sudut (BUR). Setelah itu, melakukan perhitungan sesuai dengan petun-juk yang telah dirangkum pada Tabel 2.
Tabel 2. Trajectory Design Calculation 2)
Nilai yang Dicari Formula
Northing north target coordinate - north surface coordinate
Easting east surface coordinate – east target coordinate
horizontal
displacement √
radius of curvature x
Inklinasi Maksimum
jika nilai H > R Persamaan 4
Inklinasi Maksiimum
jika nilai H < R Persamaan 3
Measure Depth of
EOB KOP +
θ
TVD of EOB KOP + R.sinθ
Total Measure Depth
EOB + √ Meaasure Depth of eachTarget KOP + +
Dalam mendesain J-type trajecctory digunakan beberapa asumsi, yaitu untuk kedalaman surface sampai KOP inklinasi, azimuth, dan dog leg angle bernilai nol karena lubang bor masih dianggap lurus sehingga tidak terjadi perubahan sudut maupun arah dari lubang bor, sehingga kedalaman tegak sama dengan kedalaman terukur (TVD = MD). Kemudian untuk kedalaman KOP sampai EOB, inklinasi bertambah secara konstan sebesar build up
rate dan dog leg dianggap konstan karena perubahan inklinasi yang tetap, sedangkan tidak ada perubahan arah. Kedalaman EOB sampai tangent section inklinasi dan azimuth dianggap tetap sebesar inklinasi dan azimuth terakhir pada EOB section. Akibatnya, nilai dog leg adalah nol karena tidak ada peru-bahan inklinasi dan azimuth. Kondisi seperti ini dibuat tetap sampai dengan total depth.
Langkah berikutnya adalah pengeplotan trajectory terhadap proyeksi vertikal dan proyeksi horizontal. Untuk membuat wellpath dari sudut pandang proyeksi vertikal, data yang harus diplot adalah horizontal displacement versus true vertical depth, sedangkan untuk sudut pandang proyeksi horizontal data yang harus diplot adalah northing versus easting.
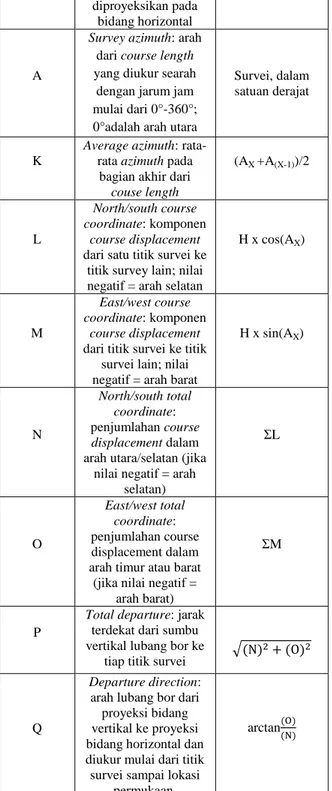
Tabel 3. Trajectory Components Determination (2)
Worksheet Letter
Value to be Obtained Source/Equation for Obtaining
Value
MD
Measure depth (MD): panjang lubang bor
sesungguhnya dari lokasi di permukaan sampai dengan kedalaman tertentu Survei I Incination angle: sudut kemiringan lubang sumur terhadap
sumbu vertikal
Survei
C
Direction: arah dari interval lubang (course direction)
Survei
Course length: selisih measure depth dari
satu titik survei ke titik survey lain
MDX – MD(X-1)
B
Average inclination: rata-rata sudut inklinasi antara upper
course dengan lower course
(IX + I(X-1))/2
Course vertical depth: selisih vertical depth dari course length dari
satu titik survei ke titik survei lainnya
TVD
True vertical depth: penjumlahan course vertical depth pada
inklinasi lubang tertentu
Ʃ
H Course departure:
jarak antara dua titik survei yang
108
diproyeksikan pada bidang horizontal
A
Survey azimuth: arah dari course length yang diukur searah
dengan jarum jam mulai dari 0°-360°; 0°adalah arah utara
Survei, dalam satuan derajat
K
Average azimuth: rata-rata azimuth pada bagian akhir dari
couse length (AX +A(X-1))/2 L North/south course coordinate: komponen course displacement dari satu titik survei ke
titik survey lain; nilai negatif = arah selatan
H x cos(AX)
M
East/west course coordinate: komponen
course displacement dari titik survei ke titik
survei lain; nilai negatif = arah barat
H x sin(AX) N North/south total coordinate: penjumlahan course displacement dalam arah utara/selatan (jika
nilai negatif = arah selatan) ƩL O East/west total coordinate: penjumlahan course displacement dalam arah timur atau barat (jika nilai negatif =
arah barat)
ƩM
P
Total departure: jarak terdekat dari sumbu vertikal lubang bor ke
tiap titik survei √
Q
Departure direction: arah lubang bor dari
proyeksi bidang vertikal ke proyeksi bidang horizontal dan diukur mulai dari titik survei sampai lokasi
permukaan.
arctan
3. PEMBAHASAN
Evaluasi desain trajectory sumur dila-kukan dengan dua cara, yaitu menghitung secara manual dengan menggunakan persa-maan yang telah dijelaskan dan dengan menggunakan software. Perhitungan secara manual dilakukan agar mengetahui filosofi perhitungan desain trajectory dan actual
trajectory, sedangkan perhitungan dengan sofware compass dipakai sebagai komparasi apakah perhitungan manual cukup akurat atau tidak. Hasil perhitungan kedua metoda tersebut kemudian diplot dan dievaluasi untuk mengetahui apakah penyimpangan trajectory melebihi toleransi radius 50 m (rectangle shape). Tipe trajetory pemboran yang direncanakan adalah tipe build and hold dengan data lapangan yang disajikan dalam tabel 4.
Tabel 4. Trajectory Data Required 6) Parameter Data Pemboran Berarah
Tipe Pemboran Build and Hold
Surface Coordinate 9641548.57 m northing 194388.37 m easting Sub-surface coordinate X = 194109.787 mE Y = 9639968.649 mN Koordinat Target 1 964086 northing 194265 easting TVD : 1557.9 m Koordinat Target 2 9640570 northing 194216 easting TVD : 1903.9 m Koordinat Target 3 9640322 northing 194172 easting 2214.9 TVD Koordinat Target 4 9640164 norting 194145 easting 2412.9 TVD KOP Depth 330 mMD Build up Rate 1.75/30 m Inklinasi 39 deg Azimuth N 190 E
Setelah mendapatkan data yang dibutuhkan, desain trajectory dapat dibuat dengan menggunakan berbagai persamaan pada tabel 2. Agar lebih ringkas, hasil perhitungan disajikan dalam bentuk tabel 5 dan tabel 6.
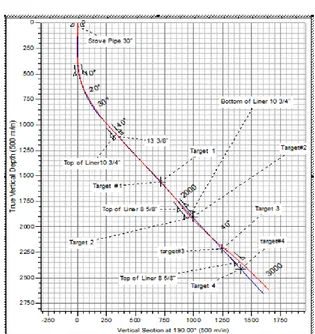
Setelah menghitung parameter yang diperlukan, grafik desain trajectory dibuat dengan mengeplot TVD versus horizontal displacement. Hasil plot grafik desain
109
trajectory dapat dilihat pada gambar 8 dan gambar 9.
Tabel 5. Trajectory Design Result Langkah Parameter Hasil
1 Northing -1579.921 mN 2 Easting -278.583 mE 3 Horizontal Displacement (H) 1604.29 m 4 Radius of Curvature (R) 982.21 m 5 Inklinasi Maksimum untuk H>R 39° @BUR 1,75°/30 m 6 EOB MD 998.57 mMD 7 EOB TVD 948.13 mTVD 8 Total MD 3200 mMD
Tabel 6. Reservoir Target Depth 6) Target TVD Target (m) MD Target (m)
1 1558 1783.33 2 1904 2228.55 3 2215 2628.73 4 2413 2883.51 5 2658.96 3200
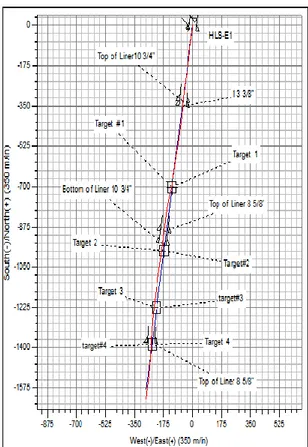
Gambar 8. Horizontal View Trajectory Untuk membuat grafik actual trajectory dengan metode minimum of curvature, data survei pemboran diperlukan. Data tersebut didapat saat pemboran melalui MWD unit. Kemudian data tersebut dikalkulasi dengan menggunakan metode minimum of curvature untuk menghitung TVD dan horizontal displacement sebagai data plot actual tra-jectory vertical view, serta northing dan
easting sebagai data plot actual trajectory horizontal view. Jumlah sampel data MWD unit yang diambil hanya dua titik survei sebagai contoh. Sampel data dapat dilihat pada tabel 7, sedangkan hasil perhitungan disajikan pada tabel 8. Secara visual, untuk hasil plot plan versus actual trajectory dapat dilihat pada gambar 10 dan gambar 11.
Gambar 9. Vertical View Trajectory
Gambar 10. Actual versus Design Trajectory Vertical View
110 Tabel 7. MWD Survey Data 7)
Survei Data Value In Radian
Upper Survey Inclination () 6.27° 0.109 Lower Survey Inclination () 7.66° 0.134 MD Lower Survey (MD1) 402.14 m - MD Upper Survey (MD2) 431.16 m - Upper Survey Azimuuth 191.17° 3.33 Lower Survey Azimuth (A2) 192.56° 3.36 TVD @402.14 m 401.85 m - Northing/Southing @402.14 m -4.90 m - Easting/Westing @402.14 m 1.76 m - North coordinate from RKB 9641548.57 m - East coordinate from RKB 194388.37 m -
Tabel 8. Hasil Perhitungan Metode Minimum of Curvature
No Nilai Perhitungan Hasil
1 Konstanta 1 (radian) Persamaan 12 0.99 2 Konstanta 2 (radian) Persamaan 13 0.141 3 FC Persamaan 14 1.001 4 ΔTVD1 Persamaan 9 430.66 m 5 Northing (N 1) Persamaan 10 -8.34 m 6 Easting (E1) Persamaan 11 1.034 m 7 tool face angle γ = arcsin x 7.6° 8 overall angle change (β) β = arc cos x (cosΔA x sinI 2 x sinI 1 + cos I1 x cosI 2) 1.4001° 9 dog leg angle δ = [β x (i)] : ΔMD for i = 30 m 1.447° 10 Build up angle / 30 m [(I 2 – I1) / ΔMD] x 30 m 1.437°
Dari membandingkan antara desain dengan actual trajectory menunjukkan bahwa penyimpangan actual trajectory terhadap target 1 sebesar 6.72 m, target 2 sebesar 19.21 m, target 3 sebesar 22.19 m, dan target 4 sebesar 44.27 m. Dari hasil analisis tersebut, deviasi yang terjadi masih berada dalam radius toleransi yang diizinkan, yaitu 50 m x 50 m dengan geometri rectangle shape sehingga dapat disimpulkan bahwa actual trajectory atau lintasan lubang bor tersebut cukup baik. Survei kedalaman akhir actual trajectory dari MWD, yaitu pada kedalaman 3137 mMD dengan centre to centre distance (C–C distance) terhadap desain trajectory adalah 58.92 m dengan posisi actual trajectory 58.57 m di atas desain trajectory dan 6.41 m sebelah kiri dari desain trajectory. Jika diproyeksikan terhadap kedalaman bit, maka C-C distance adalah 61.13 m dengan posisi 60.86 m di atas desain trajectory dan 5.7 m sebelah kiri dari desain trajectory.
Gambar 11. Actual versus Design Trajectory Horizontal View
111 Gambar 12. Compass Analysis Result 4. SIMPULAN
Hasil evaluasi terhadap trajectory pem-boran sumur Geothermal Field X menun-jukkan bahwa pemboran dapat dikatakan berhasil mengenai target reservoir. Dari hasil evaluasi pemboran berarah sumur Geother-mal Field X pada trayek 9-7/8” dengan menggunakan rotary BHA assembly terjadi penyimpangan actual trajectory terhadap desain trajectory, yaitu jarak center to center 58.92 m dengan posisi actual trajectory saat survei di kedalaman akhir adalah 58.57 m di atas desain trajectory dan 6.41 m di sebelah kiri dari trajectory plan. Berdasarkan hasil plot dengan software compass, jarak offset well to target atau penyimpangan actual trajectory terhadap target pemboran berada dalam radius toleransi rectangular shape 50 m x 50 m sehingga pemboran berarah sumur HLS-E1 masih dapat dikatakan mengenai target. Penggunaan BHA rotary steerable dapat memperkecil kemungkinan trajectory problem yang dapat menyebabkan pipa terjepit dan casing seat saat running casing karena dengan mengoperasikan jenis BHA tersebut deviasi lubang bor dapat dikontrol, sedangkan pada rotary BHA, deviasi lubang bor tidak dapat dikontrol sehingga besar dog leg severity juga tidak dapat dikendalikan.
5. DAFTAR PUSTAKA
1. Adams J. Neal. Drilling Engineering, A Complete Well Planning Approach. Tulsa: Penn-Well Publishing; 1985.
2. Bourgoyne, Adam, dkk. Applied Drilling Engineering. United States of America: Society of Petroleum Engineers; 1986.
3. Carden, Richard. Horizontal and Directional Drilling. Oklahoma: PetroSkills; 2007.
4. Chilingarian G.V. Drilling and Drilling Fluids. Amsterdam-Oxford-New York: Elsevier Scientific Publishing Company; 1981.
5. Hassan, Ibrahim. Survey Interpolation: Software for Calculating Correct Well Path between Survey Stations. Stavanger: University of Stavanger; 2012.
6. Hululais Field. Drilling Program: Data Dasar Sumur. Hululais: Pertamina Geothermal Energy; 2016.
7. Hululais Filed. Survey HLS-E1: Actual Directional Survey. Hululais: Pertamina Geothermal Energy; 2016
8. Inglis T.A. Petroleum Engineering and
Development Studies Volume 2
Directional Drlling. Oxford: Graham and Trotman; 1987.
9. Omar, Farah. “Directional Well Design, Trajecctory and Survey Calculation with Case Study In Fiale, Asal Rift, Djibouti [Thesis]. Iceland: United Nations University; 2013.
10. Nguyen J.P., “Oil and Gas Field Development Techniques Drilling”, Paris and Institut Francais du Petrole, Ruil-Malmaison, 1993.
11. Petrowiki. Directional Drilling. Petrowiki.org/Directional_drilling. Diakses pada tanggal 12 Juni 2016. 12. Rubiandini, Rudi. Teknik Operasi
Pemboran Volume II. Bandung: Institute Teknologi Bandung; 2012
Daftar Simbol
R = radius of curvature, m BUR = build up rate, deg/m L = curvature length, m
θ = maximum inclination, deg
= EOB TVD, m = KOP depth, m = radius of curvature, m = horizontal displacement, m H = horizontal displacement, m
112
KOP = kick of point, m TVD = true vertical depth, m Φ = Sudut efektif motor, deg
B’ = Sudut ekivalen untuk single bent-sub, deg B1,2 = Sudut stabilizer 1, dan stabilizer 2, deg
S1 = Jarak terkecil stabilizer 1 dengan lubang bor
(clearence), in
S2 = Jarak terkecil stabilizer 2 dengan lubang bor
(clearence), in
B’ = Sudut ekivalen untuk single bent-sub, deg X = Bent housing angle, deg
L1 = Jarak bit ke stabilizer 1, m
L2 = Jarak stabilizer 1 ke stabilizer 2, m
ΔTVD = pertambahan TVD, m
MD = pertambahan measured depth, m
D1 = faktor rasio perhitungan minimum of curvature
D2 = faktor rasio perhitungan minimum of curvature
I1 = inclination at upper survey point, deg or radian
I2 = inclination at lower survey point, deg or radian
A1 = azimuth at upper survey point, deg
A2 = azimuth at lower survey point, deg
δ = dog leg severity, deg/30 m ΔA = azimuth change (A2-A1), deg
γ = tool face angle, deg β = overall angle change, deg