HALAMAN JUDUL
TUGAS AKHIR – TE 145561
Dwi Ranggah Kurniawan NRP 2213039004 Amalia Kusumaningrum NRP 2213039021 Dosen Pembimbing 1 Suwito, ST., MT. Dosen Pembimbing 2 Eko Pujiyatno Matni, S.Pd.
PROGRAM STUDI D3 TEKNIK ELEKTRO Fakultas Teknologi Industri
Institut Teknologi Sepuluh Nopember Surabaya 2016
PENGGUNAAN
BUCK BOOST CONVERTER PADA
SISTEM
BATTERY
CHARGING
TERKENDALI
MIKROKONTROLER BERSUMBER SOLAR CELL
HALAMAN JUDUL
FINAL PROJECT – TE 145561
Dwi Ranggah Kurniawan NRP 2213039004 Amalia Kusumaningrum NRP 2213039021 Advisor 1 Suwito, ST., MT. Advisor 2
Eko Pujiyatno Matni, S.Pd.
ELECTRICAL ENGINEERING D3 STUDY PROGRAM Faculty of Industrial Technology
Institut Teknologi Sepuluh Nopember Surabaya 2016
USING BUCK BOOST CONVERTER FOR BATTERY
CHARGING SYSTEM BASED ON MICROCONTROLLER
WHICH HAVE SOLAR PANEL SOURCE
vi
vii
viii
PENGGUNAAN BUCK BOOST CONVERTER PADA SISTEM
BATTERY CHARGING TERKENDALI MIKROKONTROLER BERSUMBER SOLAR CELL
Nama Mahasiswa : Dwi Ranggah Kurniawan NRP : 2213 039 004
Nama Mahasiswa : Amalia Kusumaningrum NRP : 2213 039 021
Dosen Pembimbing 1 : Suwito, ST., MT NIP : 19810105 200501 1 004 Dosen Pembimbing 2 : Eko Pujiyatno Matni, S.Pd NIP : 19710330 199403 1 002
ABSTRAK
Potensi Energi matahari di Indonesia cukup besar sebagai wilayah negara tropis. Pemanfaatan energi matahari menggunakan solar cell
yang disimpan dalam baterai membutuhkan sebuah regulator. Umumnya
charge controller yang digunakan merupakan jenis regulator tegangan dan proses charging saat akan berhenti ketika cuaca berawan sehingga tegangan luaran solar cell kurang dari tegangan standar pengisian baterai.
Pada tugas akhir ini dibuat battery charging dengan metode buck-boost converter untuk menstabilkan tegangan luaran solar cell. Sistem
battery charging menggunakan mikrokontroler sebagai pusat kendali untuk menaikkan dan menurunkan tegangan luaran solar cell secara otomatis. Tegangan output dari sistem pengendali ini dijaga sesuai standar tegangan pengisian baterai.
Hasil pengujian battery charging mencapai efisiensi 78 % saat intensitas matahari tinggi yaitu pada pukul 10.00 sampai 14.00 Secara keseluruhan tegangan charging rata-rata yang terbaca sekitar 13,6 Volt dan arus charging yang dihasilkan rata-rata 1 Ampere. Charging battery
12 Volt membutuhkan waktu kurang lebih 5 jam.
ix
x
USING BUCK BOOST CONVERTER FOR BATTERY CHARGING SYSTEM BASED ON MICROCONTROLLER WHICH
HAVE SOLAR PANEL SOURCE
Nama Mahasiswa : Dwi Ranggah Kurniawan NRP : 2213 039 004
Nama Mahasiswa : Amalia Kusumaningrum NRP : 2213 039 021
Dosen Pembimbing 1 : Suwito, ST., MT NIP : 19810105 200501 1 004 Dosen Pembimbing 2 : Eko Pujiyatno Matni, S.Pd NIP : 19710330 199403 1 002
ABSTRACT
The potential of solar energy in Indonesia is quite large as an area of tropical countries. Utilization of solar energy using a solar cell that is stored in the battery requires a regulator. Generally, charge controller used is a type of voltage regulator and current charging process will stop when the weather was cloudy, so the output voltage of the solar cell is less than the standard voltage battery charging,
In this final task, battery charging system created by the method of buck-boost converter to stabilize the output voltage of the solar cell. Battery charging system using a microcontroller as the central control for raising and lowering the output voltage of the solar cell automatically. The output voltage of this control system is maintained according to the standard battery charging voltage.
Battery charging system test results reach 78% efficiency when the high sun intensity is at 10.00 to 14.00 Overall average charging voltage that is read around 13.6 Volt and the charging current is generated on average 1 Ampere.Charging battery 12 Volt takes approximately 5 hours.
xi
xii
KATA PENGANTAR
Puji syukur penulis panjatkan kehadirat Allah SWT yang selalu memberikan rahmat dan hidayah-Nya sehingga Tugas Akhir ini dapat terselesaikan dengan baik. Shalawat serta salam semoga selalu dilimpahkan kepada junjungan kita Nabi Muhammad SAW.
Tugas Akhir ini disusun untuk memenuhi sebagian persyaratan guna menyelesaikan pendidikan Diploma pada Bidang Studi Elektro Industri, Program Studi D3 Teknik Elektro, Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember Surabaya dengan judul :
" PENGGUNAAN BUCK BOOST CONVERTER PADA SISTEM
BATTERY CHARGING TERKENDALI MIKROKONTROLER BERSUMBER SOLAR CELL"
Dengan terselesaikannya Tugas Akhir ini, Penulis menyampaikan terima kasih yang sebesar - besarnya kepada :
1. Kedua orang tua yang senantiasa mendoakan dan memberikan dukungan dengan tulus tiada henti.
2. Bapak Suwito, ST., MT. selaku dosen pembimbing.
3. Bapak Eko Pujiyatno Matni, S.Pd. selaku dosen pembimbing dari BLKIP.
4. Bapak Ir. Hanny Budi Nugroho, MT. Slamet Budiprayitno, ST., MT. Moh. Abdul Hady, ST,. MT. selaku dosen penguji
5. Teman - teman Elektro Industri Angkatan 2013 yang selalu memberikan doa, semangat, dan dukungannya.
6. Semua pihak yang telah membantu baik secara langsung maupun tidak langsung dalam proses penyelesaian Tugas Akhir ini.
Penulis menyadari dan memohon maaf atas segala kekurangan pada Tugas Akhir ini. Akhir kata, semoga Tugas Akhir ini dapat bermanfaat dalam pengembangan keilmuan di kemudian hari.
Surabaya, Juni 2016
xiii
xiv
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN JUDUL ... iii
PERNYATAAN KEASLIAN TUGAS AKHIR ... v
LEMBAR PENGESAHAN ... vii
ABSTRAK ... ix
ABSTRACT ... xi
KATA PENGANTAR ... xiii
DAFTAR ISI ... xv
DAFTAR GAMBAR ... xvii
BAB I PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Rumusan Masalah ... 1
1.3 Batasan Masalah ... 2
1.4 Tujuan Perencanaan ... 2
1.5 Sistematika Laporan Tugas Akhir ... 2
1.6 Relevansi ... 3
BAB II TEORI PENUNJANG 2.1 Mikrokontroler ATMega328 ... 5
2.2 Buck boost converter ... 5
2.3 Sensor Arus ... 10
2.4 Voltage Divider ... 12
2.5 Accumulator/Aki ... 13
BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Blok Diagram Fungsional ... 15
3.2 Perancangan Penunjang Hardware ... 16
3.2.1 Perancangan Box Control ... 16
3.3 Perancangan Elektronik ... 17
3.3.1 Setting Port Mikrokontroler ... 17
3.3.2 Perancangan Buck Boost Converter ... 18
3.3.3 Perancangan Driver Mosfet ... 22
3.3.4 Perancangan Rangkaian Sensor Tegangan ... 23
3.3.5 Perancangan Rangkaian Sensor Arus ... 24
3.4 Perancangan Perangkat Lunak (software) ... 24
xv
3.4.2 Perancangan Program Pembacaan Sensor
Tegangan... 26
3.4.3 Perancangan Program Pembacaan Sensor Arus .. 27
3.4.4 Perancangan Program Keseluruhan ... 28
BAB IV PENGUJIAN DAN ANALISA DATA 4.1 Pengujian Solar Cell ... 31
4.2 Pengujian Tegangan Output Terhadap Perhitungan ... 32
4.3 Pengujian Nilai Duty Cycle ... 33
4.4 Pengujian Sensor Tegangan ... 34
4.4 Pengujian Sensor Arus ... 35
4.5 PengujianKeseluruhan ... 36
BAB V PENUTUP 5.1 Kesimpulan ... 41
5.2 Saran ... 42
DAFTAR PUSTAKA ... 43
LAMPIRAN ATABEL HASIL PENGUJIAN ... A-1
LAMPIRAN B PROGRAM ... B-1
LAMPIRAN C DATASHEET ... C-1
LAMPIRAN D GAMBAR ... D-1
xvi
DAFTAR GAMBAR
Gambar 2.1 ATMega 128 ... 5
Gambar 2.2 Rangkaian Non Inverting Buck Boost Converter mode buck ... 6
Gambar 2.3 Analisa Switch Tertutup ... 6
Gambar 2.4 Analisa Switch Terbuka ... 7
Gambar 2.5 Rangkaian Non Inverting Buck Boost Converter mode boost ... 7
Gambar 2.6 Analisa Switch Tertutup ... 8
Gambar 2.7 Analisa Switch Terbuka ... 8
Gambar 2.8 Rangkaian Non Inverting Buck Boost Converter ... 9
Gambar 3.1 Blok Fungsional Sistem Baterai Charging ... 15
Gambar 3.2 Desain Box Kontrol ... 16
Gambar 3.3 Skematik Setting Port Mikrokontroler ... 18
Gambar 3.4 Online Calculator Coil ... 20
Gambar 3.5 Spesifikasi Inti Toroid ... 21
Gambar 3.6 Rangkaian Keseluruhan Sistem Battery Charging ... 21
Gambar 3.12 Contoh Segmen Program Pembangkitan Pulsa PWM ... 26
Gambar 3.13 Flowchart Sensor Tegangan ... 26
Gambar 3.14 Contoh Segmen Program Pembacaan Sensor Tegangan ... 27
Gambar 3.15 Flowchart Kalibrasi Sensor Arus ... 27
Gambar 3.16 Contoh Segmen Program Kalibrasi Sensor Arus... 28
xvii
Gambar 4.1 Rangkaian Beban Pengujian Solar Cell ... 31 Gambar 4.2 Grafik Vout dan Iout yang dihasilkan solar
cell ... 31 Gambar 4.3 Rangkain Pengujian Buck Boost Converter . 32 Gambar 4.4 Grafik Tegangan output Buck Boost Converter
dan Tegangan output seharusnya ... 32 Gambar 4.5 Grafik Perbandingan Vinput dan Duty Cucle
Mode Buck ... 33 Gambar 4.6 Grafik Perbandingan Vinput dan Duty Cucle
Mode Boost ... 33 Gambar 4.7 Rangkaian Pengujian Sensor Tegangan ... 34 Gambar 4.8 Grafik Perbandingan Tegangan input dan
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Saat ini banyak perangkat elektronik yang menggunakan sumber energi dari solar cell yang disimpan dalam sebuah baterai. Baterai merupakan sumber listrik portable yang dapat di isi ulang. Penggunaan listrik PLN untuk media pengisian baterai secara terus menerus akan mengakibatkan pemborosan energi listrik dari PLN. Agar tidak terjadi pemborosan energi listrik maka digunakan energi alternatif yang terbarukan. Sebagai negara beriklim tropis seperti di Indonesia banyak energi alternatif yang bisa dimanfaatkan untuk dikonversi menjadi energi listrik, misalnya angin, cahaya matahari, ombak dan sebagainya. Energi matahari sangat cocok jika dikonversi ke energi listrik karena sinar matahari jumlahnya tak terbatas meskipun ada kurun waktunya antara terbit sampai terbenam. Pengkonversian energi matahari ke energi listrik membutuhkan suatu solar cell.
Selama ini baru ada alat charging baterai yang hanya berfungsi sebagai regulator tegangan solar cell saja. Penelitian sebelumnya telah dilakukan terkait battery charging bersumber solar cell yaitu Dani S, Rizka M, 2012, “Rancang Bangun Kontroler Baterai Charger Untuk
Solar Cell” dan Aulia Rizki “Battery Charger Dengan Converter Boost”
Pada penelitian tersebut DC DC Converter menggunakan boost. Pada penelitian tersebut DC DC Converter menggunakan boost converter. Namun dengan metode boost converter hanya mengandalkan tegangan lebih rendah untuk di regulasi ke level lebih tinggi. Hal itu tentunya akan sangat merugikan karna pada kondisi cuaca yang tidak menentu menyebabkan output dari solar cell tidak akan mencapai standar tegangan pengisian baterai. Untuk itu perlu adanya suatu metode yang dapat mengefektifkan tegangan output solar cell karena intensitas cahaya matahari yang berubah - ubah.
Salah satu metode yang dapat dilakukan adalah menggunakan metode buck boost converter bersumber solar cell untuk membuat sistem pengendali pengisian baterai. Metode Buck Boost Converter
2
converter akan berada dalam mode buck untuk menurunkan level tegangan. Tegangan output dari sistem pengendali ini dijaga sesuai standar tegangan pengisian baterai yaitu 13,6 volt DC.
1.2 Rumusan Masalah
Pada Tugas Akhir ini yang menjadi permasalahan utama adalah tidak ada sistem battery charging yang dapat menstabilkan tegangan
output dari solar cell baik saat intensitas cahaya rendah, sedang atau tinggi menjadi standar level tegangan pada battery charging.
1.3 Batasan Masalah
Level terendah tegangan luaran solar cell yang diproses adalah 7,5 Volt dan level tegangan tertinggi adalah 21 Volt. Dibawah 7,5 Volt sistem battery charging tidak akan bekerja.
Sistem battery charging menggunakan satu solar cell sebagai sumber dan satu baterai 12 Volt sebagai beban
Mikrokontroler menggunakan Arduino Uno
1.4 Tujuan Perencanaan
Tujuan dari penelitian ini adalah untuk membuat Battery Charging
dengan metode buck boost converter yang dapat bekerja pada berbagai tingkat pencahayaan. Hasil yang diharapkan adalah output tegangan yang stabil yaitu 13,6 Volt dari solar cell sehingga mampu digunakan untuk mencharge baterai
1.5 Sistematika Laporan Tugas Akhir
Sistematika pembahasan tugas akhir ini terdiri dari lima bab, yaitu pendahuluan, teori penunjang, perencanaan dan pembuatan alat, pengujian dan analisa alat, serta penutup.
Bab I : PENDAHULUAN
Pada bab ini membahas tentang latar belakang permasalahan, permasalahan, tujuan, sistematika laporan, serta relevansi.
Bab II : TEORI PENUNJANG
3
Bab III : PERENCANAAN DAN PEMBUATAN ALAT
Membahas tentang perencanaan dan pembuatan perangkat keras (hardware) yang meliputi perangkaian solar cell, pembuatan kotak buck boost converter, perancangan mikrokontroler, perancangan sensor. Serta perangkat lunak (software) berupa program untuk membangkitkan PWM (Pulse Width Modulation) pada Mikrokontroler
Bab IV : PENGUJIAN DAN ANALISA ALAT
Membahas tentang pengukuran, pengujian, dan penganalisaan terhadap komponen-komponen fisik seperti pengukuran tegangan pada input maupun output, pengujian
duty cycle, pengujian keseluruhan baterry charging. Bab V : PENUTUP
Menjelaskan tentang kesimpulan dari tugas akhir ini dan saran-saran untuk pengembangan alat ini lebih lanjut
1.6 Relevansi
Dengan adanya battery charging ini diharapkan proses charging
4
5
BAB II
TEORI PENUNJANG
2.1 Mikrokontroler ATMega 328 [1]Mikrokontroler adalah sebuah komputer kecil disuatu sirkuit terpadu yang berisi tentang inti prosesor, memori dan input/output yang telah diprogram. Program disimpan dalam bentuk RAM, Nor Flash, OTP ROM yang disertakan dalam chip.
Salah satu jenis mikrokontroler dari tipe Atmel AVR (8-bit) adalah ATmega 328. ATMega328 adalah mikrokontroller keluaran dari atmel yang mempunyai arsitektur RISC (Reduce Instruction Set Computer) yang setiap proses eksekusi data lebih cepat dari pada arsitektur CISC (Completed Instruction Set Computer). Mikrokontroller ini memiliki beberapa fitur antara lain :
130 macam instruksi yang hampir semuanya dieksekusi dalam satu siklus clock.
32 x 8-bit register.
Kecepatan mencapai 16 MIPS dengan clock 16 MHz. 32 KB Flash memory dan pada arduino
Memiliki EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 1KB sebagai tempat penyimpanan data semi permanen karena EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
Memiliki SRAM (Static Random Access Memory) sebesar 2KB. Memiliki pin I/O digital sebanyak 14 pin 6 diantaranya PWM (Pulse Width Modulation) output.
Gambar 2.1 ATmega 328 2.2 Buck- Boost Converter [2]
Buck Boost Converter berfungsi untuk mengubah level tegangan DC, baik ke level yang lebih rendah dan ke level yang lebih tinggi. Rangkaian Non-inverting Buck-Boost (NIBB) menggunakan dua buah
6
Rangkaian NIBB mempunyai tiga mode pengoperasian, yakni mode
buck , boost dan buck-boost. Ketika tegangan input dibawah tegangan yang diinginkan maka rangkaian akan berubah menjadi mode boost. Sebaliknya ketika tegangan input diatas tegangan yang diinginkan, maka mode akan berubah ke mode buck. Ketika tegangan input stabil mendekati tegangan yang diinginkan, maka bekerja pada mode buck-boost.
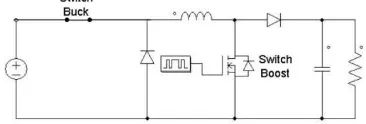
Mode Buck
Pada mode buck, Switch buck akan mendapat sinyal switching dari PWM1, sedangkan Switch boost mendapat sinyal switching PWM2 dengan nilai duty-cycle (D) = 0, sehingga switch boost akan open.
Gambar 2.2 Rangkaian Non Inverting Buck Boost Convertermode
buck
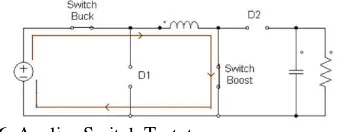
Pada mode ini analisa rangkaian terbagi menjadi dua, analisa saklar tertutup dan terbuka.
Gambar 2.3 Analisa switch tertutup
Analisa switch tertutup pada mode buck, ketika Switch buck kondisi ON (close) sedangkan Dioda 1 bekerja reverse-bias dan Dioda 2 bekerja
forward-bias, sehingga arus akan mengisi induktor sekaligus menyuplai beban.
7
Gambar 2.4 Analisa switch terbuka
Analisa switch terbuka ketika Switch buck open maka Dioda 1 dan diode 2 bekerja forward-bias, arus yang tersimpan di induktor akan menyuplai beban (discharging).
Dengan persamaan nilai Vout adalah sebagai berikut:
Vout = Vin . D
Mode Boost
Pada mode boost, Switch boost mendapat sinyal switching PWM2.
Switch buck mendapat sinyal PWM1 (duty-cycle=1) dan selalu close.
.
Gambar 2.5 Rangkaian Non Inverting Buck Boost Convertermode
boost
8
Gambar 2.6 Analisa Switch Tertutup
Analisa switch tertutup pada mode boost, ketika Switch boost pada kondisi ON (close) , D1 dan D2 bekerja reverse-bias, sehingga arus akan mengisi induktor. Polaritas induktor pada sisi kiri lebih positif dibandingkan sisi kanannya.
i
Gambar 2.7 Analisa Switch Terbuka
Analisa switch terbuka ketika Switch boost open maka D1 bekerja
reverse bias dan D2 bekerja forward-bias, arus yang tersimpan di induktor akan berkurang karena impedansi yang lebih tinggi. Berkurangnya arus pada induktor menyebabkan induktor tersebut membalik polaritasnya (lebih negatif dari sisi kiri) sehingga arus yang mengalir pada dioda dan pada beban adalah penjumlahan antara arus pada sumber dan arus pada induktor. Disaat yang bersamaan kapasitor akan melakukan penyimpanan energi dalam bentuk tegangan. Boost Converter memiliki luaran lebih tinggi dibandingkan tegangan input.
Dengan persamaan nilai Vout adalah sebagai berikut:
9
Mode Buck-Boost
Pada mode buck-boost switch buck dan switch boost mendapat sinyal switching PWM1 dan PWM2.
Gambar 2.8 Rangkaian Non Inverting Buck Boost Converter
Prinsip kerja rangkaian mode buck-boost ini dibagi menjadi dua yaitu: analisa switch tertutup dan switch terbuka.
Gambar 2.9 Analisa switch tertutup
Gambar 2.9 menunjukkan rangkaian buck-boost dengan analisa
switch tertutup dimana switch buck dan Switch boost ON (closed). Hal ini menyebabkan dioda 1 dan dioda 2 bekerja reverse-bias sehingga arus akan mengisi induktor L (charging) dan arus induktor (IL) naik sampai arus maksimum dari induktor. Dengan rumus penurunan pada analisa switch tertutup adalah sebagai berikut:
Vin = VL Vin = L x (di/dt) Vin = L x (di/Ton)
10
Gambar 2.10 menunjukkan rangkaian buck-boost dengan anlisa
switch terbuka dimana switch buck dan switch boost OFF (open). Sehingga kedua dioda bekerja forward-bias dan arus yang tesimpan pada induktor L akan menyuplai ke beban (discharging). Dengan rumus penurunan pada saat mode saklar terbuka adalah sebagai berikut:
Vout = VL Vout = L x (di/dt) Vout = L x (di/Toff) L di = Vout . Toff
Ketika mode saklar tertutup dan terbuka disubtitusikan, maka akan diperoleh persamaan tegangan output rangkaian buck-boost converter
11
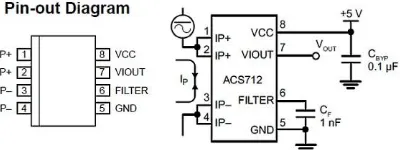
Gambar 2.11 ACS712-20A-T
Spesifikasi Sensor Arus ACS712-20A-T: 1.Berbasis ACS712-20A-T dengan fitur:
Waktu kenaikan perubahan luaran = 5 µs. Lebar frekuensi sampai dengan 80 kHz.
Total kesalahan luaran 1,5% pada suhu kerja TA= 25°C. Tahanan konduktor internal 1,2 mΏ.
Sensitivitas luaran 100 mV/A.
Mampu mengukur arus AC atau DC hingga 20 A. 2.Tegangan kerja 5 VDC.
3.Dilengkapi dengan penguat operasional untuk menambah sensitivitas luaran.
Cara kerja sensor ini adalah arus yang dibaca mengalir melalui kabel tembaga yang terdapat didalamnya yang menghasilkan medan magnet yang di tangkap oleh IC medan terintegrasi dan diubah menjadi tegangan proporsional. Ketelitian dalam pembacaan sensor dioptimalkan dengan cara pemasangan komponen yang ada di dalamnya antara penghantar yang menghasilkan medan magnet dengan tranducer medan secara berdekatan.
Gambar 2.12 Diagram pin ACS712
12
2.4 Voltage Divider [4]
Rangkaian pembagi tegangan biasanya digunakan untuk membuat suatu tegangan referensi dari sumber tegangan yang lebih besar, titik tegangan referensi pada sensor, untuk memberikan bias pada rangkaian penguat atau untuk memberi bias pada komponen aktif. Rangkaian pembagi tegangan pada dasarnya dapat dibuat dengan 2 buah resistor, contoh rangkaian dasar pembagi tegangan dengan output VO dari tegangan sumber VI menggunakan resistor pembagi tegangan R1 dan R2 seperti pada gambar 2.7.
Gambar 2.13 Rangkaian dasar voltage divider
Tahanan efektif dari kedua resistor seri ini adalah R1 + R2. Jatuh
tegangan pada gabungan kedua resistor ini adalah Vin, menurut Hukum
Ohm arus yang mengalir adalah
Tegangan pada R2 menjadi :
Mensubstitusikan I dengan persamaan pertama, menghasilkan
Persamaan ini adalah persamaan untuk menghitung tegangan output yang dihasilkan oleh sebuah rangkaian pembagi tegangan. Dengan memilih dua buah resistor dengan nilai tahanan yang sesuai, kita dapat memperoleh nilai tegangan output manapun didalam kisaran 0 V hingga Vin
2.5 Accumulator / Aki [5]
13
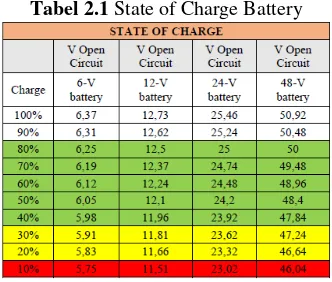
Tabel 2.1 State of Charge Battery
Berdasarkan Tabel 2.1, pada umumnya dalam kondisi optimal, aki dikatakan penuh saat pengisian mencapai 80%. Jika pengisian lebih dari 80% akan mengalami over charge yang dapat merusak aki. Selain itu aki dapat dikatakan kosong atau tidak dapat digunakan ketika pengisian mencapai 20%. Pada level tersebut maka aki harus segera diisi.
Arus ideal saat pengisian aki adalah 10% sampai 30% dari arus aki. Lama pengisian aki berkisar 4,5 jam sampai 10 jam. Charger aki dengan arus yang besar menyebabkan aki cepat penuh, namun aki akan mendidih dan panas serta beresiko sel pada aki melengkung dan rusak.
Voltage charger biasanya disetting 110% sampai 120% dari nominal tegangan aki. Bila aki 12 volt maka tegangan charger harus sekitar 14,4 Volt.
14
15
BAB III
PERANCANGAN DAN PEMBUATAN ALAT
Pada bab ini dibahas mengenai perancangan perangkat keras (hardware) dan perangkat lunak (software). Hal tersebut guna mewujudkan tugas akhir yang berjudul “Penggunaan buck boost converter pada sistem battery charging terkendali mikrokontroler bersumber solar cell”.
3.1 Blok Fungsional Sistem
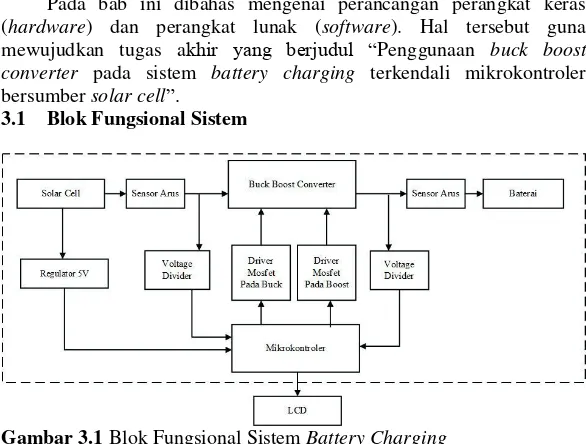
Gambar 3.1 Blok Fungsional Sistem Battery Charging
Sistem battery charging menggunakan solar cell sebagai sumber energi listrik .Tegangan luaran solar cell berkisar 0-21 Volt maka diperlukan rangkaian buck boost converter untuk menstabilkan tegangan. Tegangan luaran solar cell dikontrol agar stabil di 13,6 volt sebagai standart pengisian baterai.
Pusat pengendali sistem battery charging menggunakan Mikrokontroler. Sumber tegangan Mikrokontoler berasal dari luaran
solar cell yang diregulasi dengan dc to dc voltage regulator. Mikrokontroler menghasilkan PWM untuk mengatur switch mosfet pada
buck boostconverter. Terdapat dua mosfet pada buck boost converter, yaitu mosfet untuk buck dan mosfet untuk boost. Ketika tegangan luaran
solar cell dibawah 13,6 volt, maka mosfet mode buck selalu ON dan MOSFET mode boost switching. Sebaliknya ketika tegangan luaran
16
Voltage divider mengirimkan sinyal ke mikrokontroler untuk mengubah duty cycle PWM secara otomatis. Sensor arus mengirim sinyal ke mikrokontroler untuk menunjukkan arus yang mengalir pada sumber dan luaran buck boost converter.
Tegangan luaran yang telah stabil sebesar 13,6 volt digunakan untuk mengisi baterai.
3.2 Perancangan Penunjang Hardware
Perancangan Penunjang hardware terdiri dari perancangan box control.
3.2.1 Perancangan Box Control
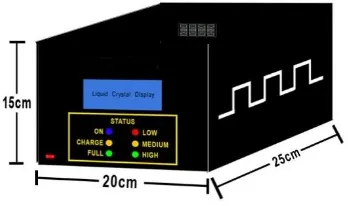
Box control terbuat dari acrylic warna hitam dengan tebal 5mm dan dibentuk kubus dengan ukuran 25cm x 20cm x 15cm. Box control
berisi rangkaian elektronik meliputi rangkaian buck boost converter, rangkaian voltage divider, rangkaian sensor arus, dan indikator lampu yang menunjukan kondisi alat.
Gambar 3.2 Desain BoxControl
Bagian depan box control dipasang LCD berukuran 4x20 yang berfungsi untuk menampilkan informasi pembacaan tegangan input, tegangan output, duty cycle, arus input dan arus output. Selain itu terdapat enam lampu indikator dengan keterangan sebagai berikut : 1. Ketika lampu merah (On) menyala menunjukkan bahwa
mikrokontroler sebagai pusat kendali telah aktif.
17
3. Ketika lampu kuning (Charge) menyala, menunjukkan terjadi proses
charging pada baterai.
4. Ketika lampu kuning (Medium) menyala menunjukkan kondisi baterai 30% - 80% dari keadaan penuh.
5. Ketika lampu hijau menyala (high), menunjukkan kondisi baterai 90% - 100% (penuh)
6. Ketika lampu hijau (Full) menyala, berarti baterai yang dicharge
sudah penuh.
3.3 Perancangan Elektronik
Perancangan elektronik membahas setting port mikrokontroler, rangkaian buck boost converter, sensor tegangan, sensor arus.
3.3.1 SettingPort Mikrokontroler
Mikrokontroler digunakan sebagai pusat kendali sistem battery charging. Mikrokontroler yang digunakan adalah Arduino Uno. Arduino Uno adalah sebuah board mikrokontroler didasarkan pada ATmega 328. Pada Sistem battery charging digunakan beberapa pin mikrokontroler dengan rancangan sesuai pada Tabel 3.1.
Tabel 3.1 Konfigurasi Port Mikrokontroler
No Pin Arduino Keterangan
18
Gambar 3.3 Skematik Setting Port Mikrokontroler
3.3.2 Perancangan Buck-Boost converter
Desain Rangkaian Buck Boost converter menggunakan dua mosfet sebagai switch dalam menurunkan tegangan (Buck Mode) dan menaikkan tegangan (Boost Mode) melalui pengaturan duty cycle PWM yang di hasilkan dari mikrokontroler secara otomatis.
Rangkaian buck boost converter digunakan untuk menstabilkan tegangan luaran solar cell. Tegangan luaran yang di harapkan mencapai 13,6 Volt.
Pada perancangan buck boost converter di jelaskan mengenai perhitungan komponen buck boost converter, pembuatan induktor dan rangkaian buck boost converter secara keseluruhan.
A. Buck-Boost converter
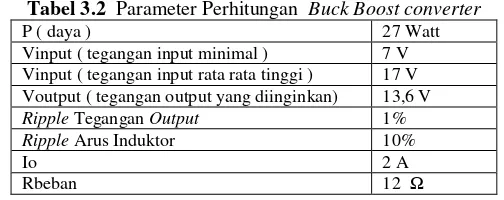
Tabel 3.2 Parameter Perhitungan Buck Boost converter
P ( daya ) 27 Watt
Vinput ( tegangan input minimal ) 7 V
Vinput ( tegangan input rata rata tinggi ) 17 V
Voutput ( tegangan output yang diinginkan) 13,6 V
Ripple Tegangan Output 1%
Ripple Arus Induktor 10%
Io 2 A
Rbeban 12 Ω
19 1. Perhitungan dengan input 7 Volt a. Menentukan nilai Duty Cycle
(3.1)
b. Menentukan nilai induktor
(3.2)
c. Menentukan nilai kapasitor
(3.3)
2. Perhitungan dengan input 17 Volt a. Menentukan nilai Duty Cycle
(3.4)
b. Menentukan nilai induktor
(3.5)
20
c. Menentukan nilai kapasitor
(3.6)
Dari perhitungan buck boost converter dipilih nilai induktor terkecil 560 mikroHenry dan nilai kapasitor terbesar 470 mikroFarad.
B. Perancangan Induktor
Pada perancangan buck-boost converter, induktor berfungsi untuk menyimpan arus. Agar nilai induktor sesuai dengan perhitungan, maka induktor dibuat sendiri dengan cara melilitkan kawat pada inti toroid.
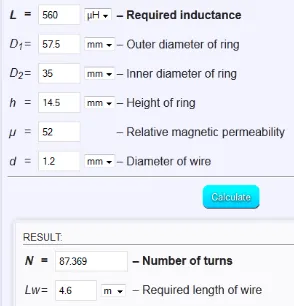
Untuk menentukan jumlah lilitan pada inti toroid, digunakan online calculator coil seperti pada Gambar 3.4. Dibutuhkan 86 lilitan untuk mendapatkan nilai induktansi 560 uH. Hasil tersebut hampir mendekati nilai yang diinginkan pada algoritma perhitungan nilai komponen buck boost converter.
21
Gambar 3.5 Spesifikasi Inti Toroida
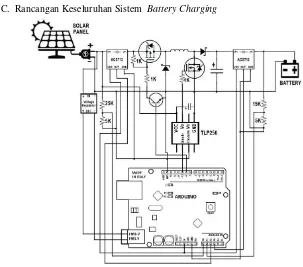
C. Rancangan Keseluruhan Sistem Battery Charging
22
Gambar keseluruhan rangkaian sistem battery charging dengan data:
-
Sumber Tegangan ( Solar cell ) = 0 – 21 Volt-
Mikrokontroler Atmega 328-
Induktor (L) = 560 mikroHenry-
Capasitor ( C ) = 470 mikroFarad 100 Volt-
DriverMosfet yang digunakan adalah Transistor C829 dan TLP 250-
Mosfet IRF4905 dan IRF 9640-
Sensor Arus ACS712-
R BEBAN = 12 Ω 20 Watt3.3.3 Perancangan Driver Mosfet
Driver mosfet yang digunakan ada 2 yaitu Transistor 2SC829 dan TLP 250. Transistor 2SC829 merupakan transistor yang berfungsi sebagai switching mode buck. Spesifikasi Transistor 2SC829 sebagai berikut :
Collector to base voltage(VCBO) : 30 V Collector to emitter voltage(VCEO) : 20 V Emitter to base voltage(VEBO) :5 V Collector Current(Ic) : 30 mA
Gambar 3.7 Rangkaian Driver Mosfet Mode Buck
Kaki collector transistor 2CS829 disambungkan dengan gate IRF 4905, Emitter disambungkan pada ground, Base disambungkan pada pin pwm mikrokontroler.
Driver mosfet yang digunakan sebagai switching mode boost adalah TLP 250. Spesifikasi TLP 250 sebagai berikut :
23 • Supply current (ICC): 11mA(max.) • Supply voltage (VCC): 10−35V • Output current (IO): ±1.5A (max.) • Switching time (tpLH/tpHL): 1.5µs(max.) • Isolation voltage: 2500Vrms(min.)
Gambar 3.8 Rangkaian Driver Mosfet Mode Boost
Pin 2 disambungkan dengan mikrokontroler untuk dibangkitkan sinyal PWM, pin 3 disambungkan pada ground mikrokontroler, pin 6 disambungkan pada gate mosfet IRF4905 dan pin 8 disambungkan pada Vcc 12 volt.
3.3.4 Perancangan Rangkaian Sensor Tegangan
Sensor tegangan yang digunakan adalah rangkaian pembagi tegangan. Rangkaian pembagi tegangan berfungsi sebagai konversi tegangan dari solar cell. Tegangan output yang dihasilkan solar cell
dimisalkan 0 - 30 Volt, sedangkan tegangan yang diinputkan pada mikrokontroler 0 sampai 5 Volt.
Gambar 3.9 Rangkaian Pembagi Tegangan
Perhitungan rangkaian pembagi tegangan sebagai berikut :
24 Misalkan R2 = 25 kΩ
Vout = 5 Volt (V mikrokontroler) Vin = 30 Volt ( V input dari solar cell) resistor 25 kΩ dan resistor 5 kΩ.
3.3.5 Perancangan Rangkaian Sensor Arus
Gambar 3.10 Rangkaian Sensor Arus
Sensor arus yang digunakan adalah ACS712. Pin IP+ dan IP- terhubung pada input. Sensor arus dicatu oleh tegangan 5V yang terhubung ke Vcc. Keluaran sensor arus Vout terhubung ke pin ADC mikrokontroler.
3.4 Perancangan Perangkat Lunak (Software)
Pada bab ini dibahas perancangan program untuk pembangkit sinyal PWM, perancangan program pembacaan sensor tegangan, program kalibrasi sensor arus dan perancangan program keseluruhan sistem battery charging. Simbol Flowchart yang digunakan berdasarkan
Standart ECMA-4 (European Computer Manufacturers Association). 3.4.1 Perancangan Program Pembangkit PWM
25
Gambar 3.11 Flowchart Pembangkitan PWM Penjelasan flow chart sebagai berikut:
1. Start adalah ketika program dimulai.
2. Inisialisasi Port PWM, Port 9 digunakan untuk PWM mode buck,
Port 10 digunakan untuk PWM mode boost.
3. Duty Cycle akan menyesuaikan dari perubahan tegangan input dan akan mengatur agar tegangan output tetap pada 13,6 volt
26
Gambar 3.12 Contoh Segmen Program Pembangkit Pulsa PWM
3.4.2 Perancangan Program Pembacaan Sensor Tegangan
Gambar 3.13 Flowchart Pembacaan Sensor Tegangan Penjelasan flowchart adalah sebagai berikut:
1. Start adalah ketika program dimulai.
2. Inisialisasi Port ADC Mikrokontroler, sensor tegangan input dibaca di Port A0, sensor tegangan output dibaca di Port A1
27
4. Data tegangan input dan tegangan output yang sudah di konversi ditampilkan pada LCD.
Gambar 3.14 Contoh Segmen Program Pembacaan Sensor Tegangan
3.4.3 Perancangan Program Pembacaan Sensor Arus
Gambar 3.15Flowchart Program Pembacaan Sensor Arus Penjelasan flowchart sebagai berikut:
1. Start adalah ketika program dimulai.
28
3. Data yang masuk pada port ADC berupa tegangan. Ketika mendapat arus input 0 maka terbaca 2.5 Volt. Sensor Arus memiliki resolusi 100mV/Ampere
4. Data arus input dan arus output ditampilkan pada LCD.
Gambar 3.16 Contoh Segmen Program Pembacaan Sensor Arus
3.4.4 Perancangan Program Keseluruhan
29
30 Penjelasan flow chart sebagai berikut: 1. Start adadalah ketika program dimulai
2. Inisialisasi port ADC sebagai pembaca sensor tegangan input pada pin A0, sensor tegangan output pada pin A1, sensor arus input pada A2, dan sensor arus output pada A3
3. Data pembacaan sensor tegangan output juga sebagai pembaca tegangan baterai masuk ke dalam mikrokontroler
4. Jika tegangan baterai lebih dari 12,00 volt, maka tidak ada proses charging, maka lampu status baterai akan menyala.
5. Jika tegangan baterai lebih dari 12,60 volt, maka Pin 7 = HIGH yang akan menghidupkan lampu Full&High
6. Jika tegangan baterai diantara 12,20 sampai 12.60 volt, maka Pin 11= HIGH yang akan menyalakan lampu Medium
7. Jika tegangan baterai diantara 11,89 sampai 12.20, maka Pin 8 = HIGH yang akan menyalakan lampu low secara berkedip
8. Jika tegangan baterai kurang dari 11,89 volt, maka Pin 8= HIGH yang akan menyalakan lampi Low jika tidak, maka pembacaan data diulang dari Jika baterai dalam keadaan lebih dari 12.60 volt 9. Jika tegangan baterai kurang dari 12,00 volt maka masuk pada
proses charging.
10. Jika tegangan luaran solar cell kurang dari 7,50 volt maka sistem tidak berjalan
11. Jika tegangan luaran solar cell diantara 7,50 sampai 13,00 volt, maka PWM_Buck akan ON dan PWM_Boost akan switching agar tegangan luaran buck-boost terjaga di 13,60 volt (Boost Mode) 12. Jika tegangan luaran solar cell diantara 13,00 sampai 14,00 volt
maka PWM_Buck akan switching dan PWM_Boost akan switching agar tegangan luaran buck-boost terjaga di 13,60 volt (Buck-Boost Mode)
13. Jika tegangan luaran solar cell diatas 14,00 volt dan sampai batas maksimal 21 volt, maka PWM_Buck akan switching dan PWM_Boost akan OFF agar tegangan luaran buck-boost terjaga di 13,60 volt (Buck Mode)
31
BAB IV
PENGUJIAN DAN ANALISA ALAT
Pengujian pada sistem battery charging meliputi: pengujian solar cell, pengujian buck boost converter, pengujian sensor tegangan, pengujian sensor arus dan pengujian keseluruhan. Setelah melakukan beberapa pengujian alat, data yang diperolah akan dianalisa untuk mengetahui proses kerja dari seluruh sistem battery charging.
4.1 Pengujian Solar cell
Pengujian Solar cell diperlukan untuk mengetahui tegangan tertinggi dan tegangan terendah dari solar cell.
Untuk mengukur nilai tegangan dan nilai arus yang dihasilkan
solar cell, dilakukan pengujian sederhana dengan memberikan beban berupa resistor 12 Ω 20 Watt. Pengujian dilakukan setiap 1 jam sekali.
Gambar 4.1 Rangkaian Beban Pengujian Solar cell
Gambar 4.2 Grafik Vout dan Iout Yang Dihasilkan Solar cell
Berdasarkan Gambar 4.2 didapatkan nilai tegangan tertinggi 19,1 Volt, tegangan terendah 15 Volt, Arus tertinggi 1,5 A dan Arus terendah 0,41 A dari solar cell. Tegangan dan arus yang berubah-ubah tergantung dari intensitas cahaya matahari yang mengenai solar cell.
32
4.2 Pengujian Tegangan Output Buck Boost Terhadap Perhitungan Tahap pertama pengujian Buck-boost converter adalah pengujian tegangan output yang dihasilkan Buck-boost converter menggunakan input dari power supply variable. Pada perhitungan Buck-boost converter, tegangan output yang diharapkan adalah 13,6 Volt.
Gambar 4.3 Rangkaian Pengujian BuckBoost converter
Gambar 4.4 Grafik Tegangan Output Buck Boost converter dan Tegangan Output Seharusnya
Pada Gambar 4.4 dapat dilihat perbedaan tegangan output buck boost dan tegangan output perhitungan tidaklah jauh. Dapat disimpulkan hasil perhitungan Buck-boost converter dengan hasil pengujian hampir sama, eror yang terjadi sebesar 0,07% sampai 0,2%.
4.3 Pengujian Nilai Duty Cycle
Pengujian nilai duty cycle digunakan untuk mengetahui perbandingan nilai duty cycle pada pengujian dengan hasil perhitungan. Saat tegangan input dibawah 13,6 Volt, perhitungan duty cycle
menggunakan rumus boost. Ketika tegangan input diatas 13,6 Volt, perhitungan duty cycle menggunakan rumus buck.
33
Rumus menentukan duty cycle mode boost :
Gambar 4.5 Grafik Perbandingan Vinput dan Duty Cucle Mode Buck
Gambar 4.6 Grafik Perbandingan Vinput dan Duty Cucle Mode Boost
Gambar 4.5 merupakan grafik perbandingan Vinput dan duty cycle
saat mode buck, dapat dilihat bahwa semakin besar Vinput maka semakin kecil duty cycle. Gambar 4.6 merupakan grafik perbandingan Vinput dan duty cycle saat mode boost, dapat dilihat bahwa semakin besar Vinput maka semakin kecil duty cycle. Nilai duty cycle yang dibutuhkan pada sistem battery charging adalah 0.1 sampai 0.8.
4.4 Pengujian Sensor Tegangan
Sensor Tegangan menggunakan rangkaian voltage divider. Pengujian voltage divider bertujuan untuk mengambil data tegangan yang terbaca oleh rangkaian voltage divider. Pengujian voltage divider
menggunakan fasilitas ADC pada mikrokontroler, Tegangan output pada rangkaian pembagi tegangan ditampilkan pada LCD.
34
Pengujian sensor tegangan dilakukan dengan menyambungkan
input rangkaian pembagi tegangan dengan power supply variable. Tegangan yang keluar dari power supply diatur dengan menggunakan potensiometer. Tegangan output yang terukur dimunculkan pada LCD seperti Gambar 4.7.
Gambar 4.7 Rangkaian Pengujian Sensor Tegangan
Gambar 4.8 Grafik Perbandingan VInput Dan Voutput sensor tegangan Berdasarkan Gambar 4.8 didapatkan nilai tegangan input dan nilai tegangan output sensor yang terukur hampir sama. Terdapat error
atau kesalahan dalam sistem sebesar 0,06% sampai 0,8%.
4.5 Pengujian Sensor Arus
Sensor arus yang digunakan adalah ACS 712. Pengujian sensor arus bertujuan untuk mengambil data arus yang terbaca oleh sensor arus.
Gambar 4.9 Rangkaian Pengujian Sensor Arus
Pada pengujian diberikan beban berupa resistor 4.7 Ω dan dihubungkan pada mikrokontroler sebagai pengendali. Sumber tegangan yang digunakan adalah power supply variable. Untuk menguji besarnya
35
arus yang terukur oleh sensor arus, dialirkan tegangan input yang berbeda beda.
Gambar 4.10 Grafik Pengukuran Sensor Arus
Dari grafik didapatkan nilai arus yang terukur pada sensor dan nilai input hampir sama. Terdapat error atau kesalahan dalam sistem sebesar 0 % sampai 0,8%
4.6 Pengujian Keseluruhan
Pengujian keseluruhan bertujuan untuk mengetahui performa sistem sebagai pengisi baterai 12 Volt. Pengujian keseluruhan menggunakan sumber dari solar cell , luarannya distabilkan oleh buck boost converter dan digunakan untuk mengisi baterai. Untuk menghitung efisiensi digunakan rumus sebagai berikut :
Tegangan open circuit baterai sebelum di-charging bernilai 12.12 Volt . Pengujian ini dilakukan tiga kali yaitu pada pukul 10.00 WIB, pukul 08.00 WIB dan pukul 07.30 WIB.
Gambar 4.11 Pengujian Keseluruhan Battery Charging
36
Gambar 4.12 Grafik Vinput dan VoutputBattery Charging I
Gambar 4.13 Grafik I input dan I output Battery Charging I Gambar 4.12 dan Gambar 4.13 merupakan pengujian pertama yang dilakukan pada tanggal 24 Mei 2016, pukul 10.00 WIB hingga 12.40 WIB. Tegangan charging rata-rata yang terbaca sekitar 13,6 Volt dan arus charging yang dihasilkan rata-rata 1 Ampere. Charging battery
12 Volt membutuhkan waktu 3 jam dari keadaan battery 12.12 Volt sampai 12.81 Volt (Full). Pada level tegangan luaran solar cell lebih dari 14 volt sistem buck bekerja dengan baik, meskipun arus output
belum bisa melebihi arus input dalam keadaan ideal.
37
Gambar 4.14 Grafik Vinput dan VoutputBattery Charging II
Gambar 4.15 Grafik I input dan I output Battery Charging II
Gambar 4.13 dan Gambar 4.14 merupakan hasil pengujian kedua yang dilakukan pada 27 Mei 2016, pukul 08.00 WIB hingga 14.20 WIB. Tegangan charging rata-rata yang terbaca sekitar 13,6 Volt dan arus charging yang dihasilkan rata-rata dibawah 1 Ampere. Charging battery 12 Volt membutuhkan waktu sekitar 5 jam dari keadaan battery 12,12 Volt sampai 12.81 Volt (Full). Charging baterai lebih lama karena cuaca berawan sehingga intensistas cahaya matahari rendah.
Pada level tegangan luaran solar cell kurang dari 14 volt sistem
boost bekerja dengan baik, Sistem charging battery terputus ketika tegangan luaran solar cell kurang dari 7,5 volt atau pada keadaan arus
charging kurang dari 0,2 ampere.
38
Gambar 4.16 Grafik Vinput dan VoutputBattery Charging III
Gambar 4.17 Grafik I input dan I output Battery Charging III
Gambar 4.15 dan Gambar 4.16 merupakan hasil pengujian ketiga dilakukan pada pukul 07.30 WIB hingga 12.40 WIB. Tegangan
39
BAB V
PENUTUP
5.1 Kesimpulan
Dari perencanaan, pembuatan, pengujian, analisa metode yang digunakan maka dapat disimpulkan sebagai berikut :
1. Battery charging dapat digunakan untuk mengisi baterai 12 Volt dengan tegangan charging baterai sebesar 13.6 Volt ,arus keluaran rata rata 1 Ampere.Lama proses charging baterai rata rata 4 jam. 2. Saat intensitas matahari tinggi yaitu pada pukul 10.00 sampai 14.00
efisiensi mencapai 78%
3. Pada level tegangan luaran solar panel 13 volt – 14 volt,tegangan output mencapai 12,36 sampai 13,40 Volt.
4. Pada level tegangan luaran solar panel lebih dari 14, tegangan ouput rata rata 13,6 Volt , arus output rata rata 1,2 Volt
5. Sistem charging battery terputus ketika tegangan luaran panel kurang dari 7,5 volt atau pada keadaan arus charging kurang dari 0,2 ampere.
5.2 Saran
1. Untuk pengembangan battery charging ini dapat ditambahkan komunikasi ke perangkat seperti PC, Smartphone atau lainnya agar pengambilan data lebih mudah
2. Pembuatan desain box yang tahan air akan menambah kehandalan alat disaat hujan
40
41
DAFTAR PUSTAKA
[1] Datasheet Microcontroller ATMega 128[2] Haifeng,”Design tips For an Efficient Non-Inverting Buck-Boost Converter”,Jurnal, Texas Instrument
[3] Datasheet ACS712, 2009 “Fully Integrated, Hall Effect-Based Linear Current Sensor with 2.1 kVRMS Voltage Isolation and a LowResistance Current Conductor”, Allegro MicroSystem, diakses
pada tanggal 10 April 2016.
[4] Pujiono,”Rangkaian Listrik”, Graha Ilmu,Yogyakakarta,2013. [5] ……”Battery State Of-Charge Chart For Voltage & Specific
42
A-1
LAMPIRAN A
TABEL HASIL PENGUJIAN
Tabel 4.1 Hasil Pengukuran Solar cell
Waktu Cuaca
Tabel 4.2 Pengujian Tegangan Output Pada Buck Boost converter
A-2
Tabel 4.3 Hasil Pengujian Duty Cycle
A-3
Tabel 4.4 Hasil Pengukuran Sensor Tegangan Vin sensor Vout Error (%)
A-4
Tabel 4.6 Hasil Pengujian Keseluruhan I -24 Mei 2016
A-5
Tabel 4.7 Hasil Pengujian Keseluruhan II- 27 Mei 2016
A-7
Tabel 4.8 Hasil Pengujian Keseluruhan III- 1 Juni 2016
A-8
Jam Cuaca Vin
(V)
Vout (V)
Iin (A)
Iout (A)
Efisiensi (%)
Status Baterai
11.50 Cerah 18,39 13,63 0,52 0,41 58,44 Charge
,12.00 Cerah 18,53 13,61 0,56 0,41 53,77 Charge
12.10 Cerah 18,53 13,61 0,58 0,39 49,39 Charge
12.20 Cerah 18,59 13,63 0,56 0,32 41,90 Charge
12.30 Cerah 18,50 13,63 0,57 0,29 37,48 Charge
B-1 boolean charge= false;
int32_t frequency1 = 15000; int32_t frequency2 = 15000; int pwm1; // buck pwm int pwm2; // boost pwm int ArusInput=0; int ArusOutput=0; float ArusInputRata=0; float ArusOutputRata=0; int cnt;
B-2 pinMode(7, OUTPUT); // Lampu FULL&HIGH pinMode(8, OUTPUT); // Lampu LOW
pinMode(11, OUTPUT); // Lampu MEDIUM //Mengatur Frekuensi PWM
InitTimersSafe();
SetPinFrequencySafe(9, frequency1); SetPinFrequencySafe(10, frequency2); pinMode ( BACKLIGHT_PIN, OUTPUT ); lcd.begin (20,4);
digitalWrite ( BACKLIGHT_PIN, HIGH ); lcd.createChar(0, bat);
lcd.createChar(1, efs); cnt=0;
}
void loop() {
digitalWrite(5,HIGH); //Lampu ON
//Baca Sensor Tegangan int SensorVi = analogRead(A0); int SensorVo = analogRead(A1);
B-3 ArusInput= analogRead(A2);
ArusInputRata += ArusInput; delayMicroseconds(50); }
ArusInputRata=((ArusInputRata/100)*0.004882813/0.100)-25.00; // 2.5/0.100=25.00 | 5.00/1024.00= 0.00488
//Baca Sensor Arus Output for (int i2=0; i2<100; i2++) {
ArusOutput= analogRead(A3); ArusOutputRata += ArusOutput; delayMicroseconds(50);
}
ArusOutputRata=((ArusOutputRata/100)*0.004882813/0.100)-25.00; // 2.5/0.100=25.00 | 3.425/701.44= 0.004882813
//Konversi Sensor Tegangan float Vi=(SensorVi/1023.00)*30.00; float Vo=(SensorVo/1023.00)*20.00; float Vb=(SensorVo/1023.00)*20.00;
//Konversi Efisiensi
float E=((Vo*ArusOutputRata)/(Vi*ArusInputRata))*100; //Program Charging
if(charge==false) {
lcd.clear(); lcd.setCursor(3,0);
lcd.print("BATTERY STATUS"); lcd.setCursor(0,2);
lcd.write(byte(0)); lcd.print("BATTERY :"); lcd.print(Vo);
B-4 lcd.print(Vi);
lcd.print(" Volt"); delay(1000); }
if(Vb>12.60&&Vb<=13.00) {
digitalWrite(11, LOW); digitalWrite(8, LOW); digitalWrite(6, LOW); digitalWrite(7, HIGH); }
if(Vb<12.60&&Vb>12.20) {
digitalWrite(11, HIGH); digitalWrite(8, LOW); digitalWrite(6, LOW); digitalWrite(7, LOW); }
if(Vb<12.20&&Vb>11.89) {
digitalWrite(11, LOW); digitalWrite(6, LOW); digitalWrite(7, LOW); digitalWrite(8, HIGH); delay(200);
digitalWrite(8, LOW); delay(300);
}
else if(Vb<11.00) {
digitalWrite(11, LOW); digitalWrite(8, HIGH); digitalWrite(6, LOW); digitalWrite(7, LOW); }
if(Vb<12.00&&Vb>11.89) {
B-5
if(charge==true) {
digitalWrite(7, LOW); digitalWrite(11, LOW); digitalWrite(8, LOW); digitalWrite(7, LOW); digitalWrite(6, HIGH); lcd.clear();
lcd.setCursor(3,0);
B-6
B-7 pwmWrite(9,0);
pwmWrite(10,0); charge=false; }
B-8
C-1
LAMPIRAN C
DATASHEET
C-4
C-10
C-12
C-19
C-23
D-1
LAMPIRAN D
FOTO
1. Tiang Penyanggah Solar Cell
D-2 3. Pengujian Sistem Battery Charging
E-1
1. Kerja Praktek di Dept. Maintenance PT. ATINA Buduran, Sidoarjo 2. Kerja Praktek di bagian Electric/Instrument KANGEAN ENERGY
INDONESIA Ltd. P.Pagerungan Besar, Kec.Sapeken, Kab.Sumenep
PENGALAMAN ORGANISASI
1. Wakil Ketua Musyawarah Perwakilan Kelas SMA Negeri 1 Krembung, Sidoarjo
2. Wakil Ketua Sie Kerohanian Islam SMA Negeri 1 Krembung, Sidoarjo
E-2
E-3
DAFTAR RIWAYAT HIDUP
Nama : Amalia Kusumaningrum TTL : Surabaya, 23 Januari 1995 Jenis Kelamin : Perempuan
Agama : Islam
Alamat : Jl. Bogen 3/9, Surabaya Telp/HP : 082167503015
E-mail : amalamalia4@gmail.com
RIWAYAT PENDIDIKAN
1. 2001 – 2007 : SDN Rangkah VIII/170,Surabaya 2 2007 – 2010 : SMP Negeri 1 Surabaya
3. 2010 – 2013 : SMA Negeri 2 Surabaya
4. 2013 – 2016 : D3 Teknik Elektro, Program Studi Teknik Elektro Industri - FTI Institut Teknologi Sepuluh Nopember (ITS)
PENGALAMAN KERJA
1. Kerja Praktek di PT. PAL, Surabaya
E-4