10
BAB II
TINJAUAN PUSTAKA
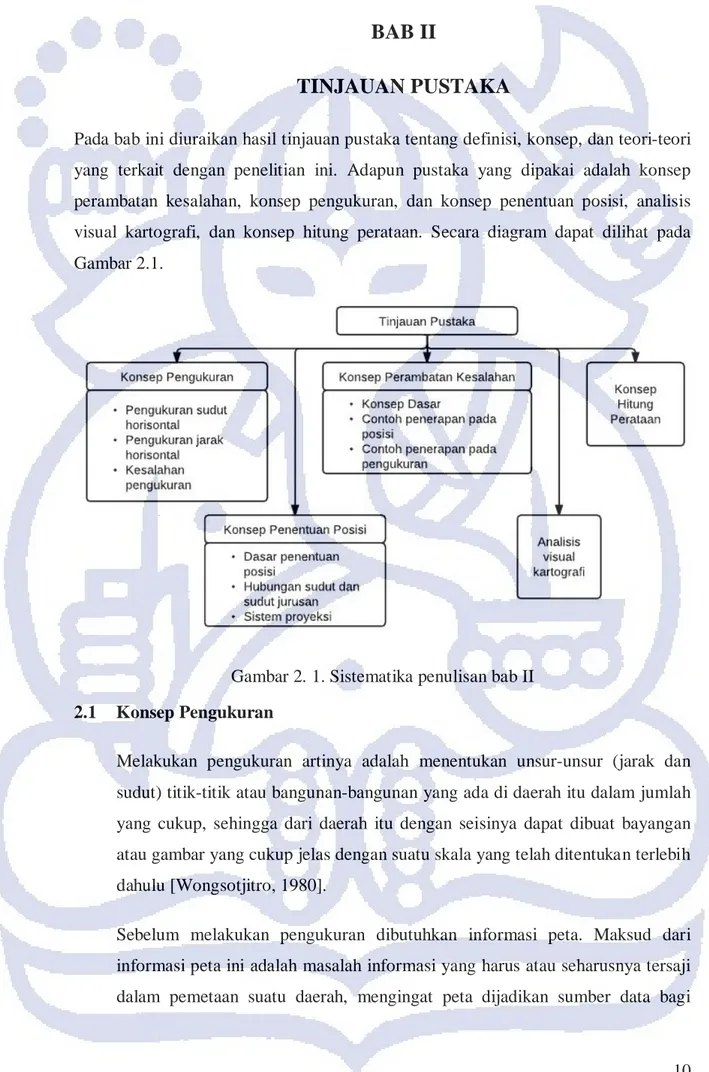
Pada bab ini diuraikan hasil tinjauan pustaka tentang definisi, konsep, dan teori-teori yang terkait dengan penelitian ini. Adapun pustaka yang dipakai adalah konsep perambatan kesalahan, konsep pengukuran, dan konsep penentuan posisi, analisis visual kartografi, dan konsep hitung perataan. Secara diagram dapat dilihat pada Gambar 2.1.
Gambar 2. 1. Sistematika penulisan bab II
2.1 Konsep Pengukuran
Melakukan pengukuran artinya adalah menentukan unsur-unsur (jarak dan sudut) titik-titik atau bangunan-bangunan yang ada di daerah itu dalam jumlah yang cukup, sehingga dari daerah itu dengan seisinya dapat dibuat bayangan atau gambar yang cukup jelas dengan suatu skala yang telah ditentukan terlebih dahulu [Wongsotjitro, 1980].
Sebelum melakukan pengukuran dibutuhkan informasi peta. Maksud dari informasi peta ini adalah masalah informasi yang harus atau seharusnya tersaji dalam pemetaan suatu daerah, mengingat peta dijadikan sumber data bagi
11 kegiatan lainnya. Penentuan informasi yang akan disajikan dalam peta perlu ditinjau beberapa aspek. Aspek tersebut antara lain adalah sebagai berikut:
• Tujuan penggunaan peta
berkaitan dengan informasi yang diperlukan user. • Skala peta yang dihasilkan
berkenaan dengan muatan informasi yang disajikan • Keragaman informasi daerah yang dipetakan.
Secara garis besar, aspek tersebut di atas, akan sangat berpengaruh terhadap pengukuran (pengambilan data), pengolahan data, dan penyajian data.
Sebelum melakukan pengambilan data ukuran, diperlukan ketentuan khusus yang disebut dengan spesifikasi teknis. Spesifikasi teknis ini dibuat untuk mempermudah pelaksanaan pengambilan data ukuran/pelaksanaan survey pemetaan dan untuk memenuhi tujuan dari pembuatan peta.
Dalam tugas akhir ini yang dibahas hanya yang terkait dengan pengukuran planimetrik yaitu pengukuran untuk mendapatkan sudut mendatar dan jarak mendatar.
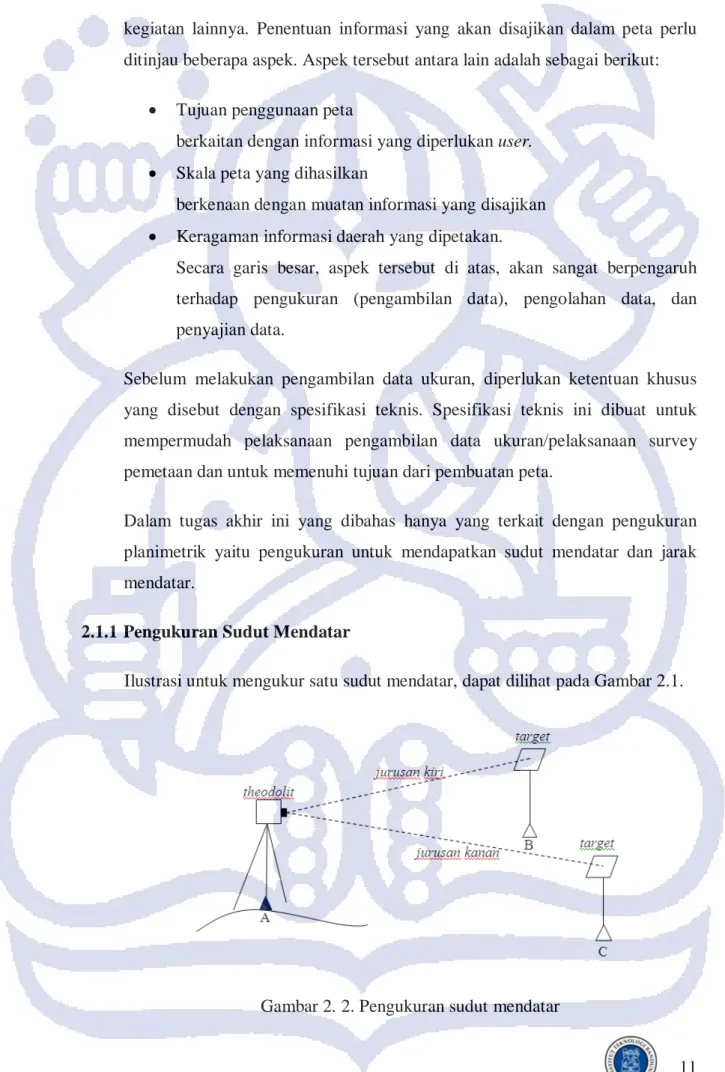
2.1.1 Pengukuran Sudut Mendatar
Ilustrasi untuk mengukur satu sudut mendatar, dapat dilihat pada Gambar 2.1.
12 Sudut mendatar antara dua jurusan (jurusan AB dan jurusan AC) diukur dengan cara reiterasi berseri. Cara ini dipilih karena dapat menghilangkan pengaruh salah sistematik alat.
Cara pengukuran reiterasi berseri dapat dilihat pada Tabel 2.1. Tabel 2. 1. Pengukuran sudut cara reiterasi berseri
Tempat Alat Kedudukan Teropong Bidikan ke Skala lingkar mendatar Sudut mendatar Sudut rata-rata P Biasa A x y-x (𝑦𝑦 − 𝑥𝑥) + (𝑦𝑦′− 𝑥𝑥′) 2 B y
Luar Biasa B y’
y’-x’
A x’
2.1.2 Pengukuran Jarak Mendatar
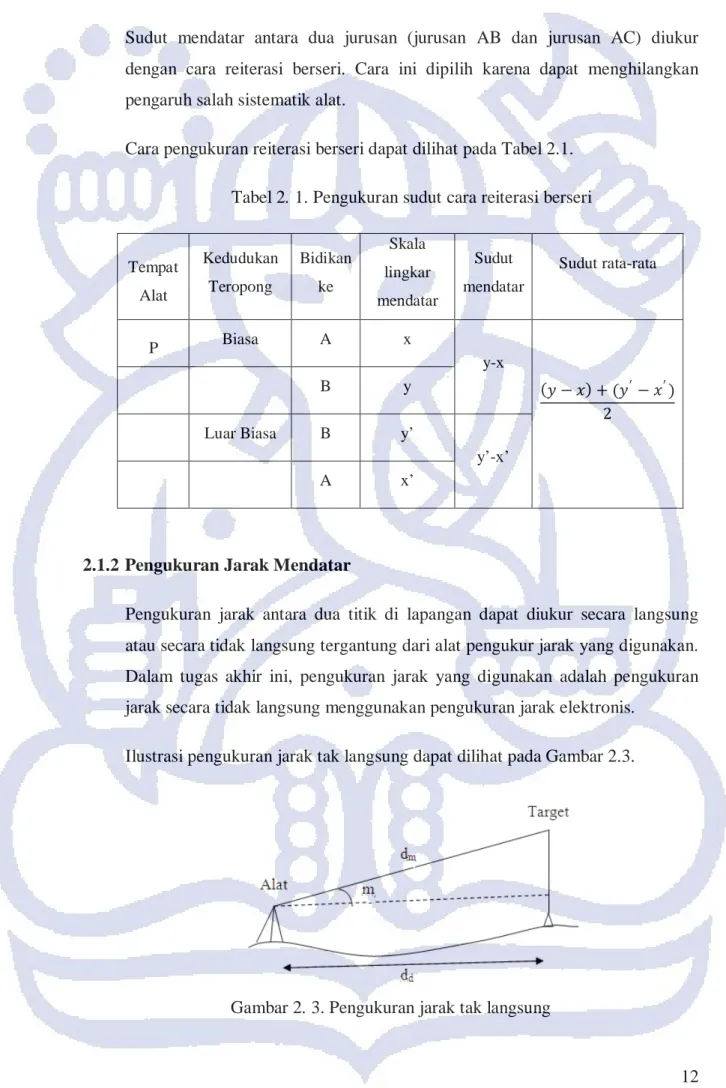
Pengukuran jarak antara dua titik di lapangan dapat diukur secara langsung atau secara tidak langsung tergantung dari alat pengukur jarak yang digunakan. Dalam tugas akhir ini, pengukuran jarak yang digunakan adalah pengukuran jarak secara tidak langsung menggunakan pengukuran jarak elektronis.
Ilustrasi pengukuran jarak tak langsung dapat dilihat pada Gambar 2.3.
13 Menghitung jarak mendatar dari pengukuran jarak tak langsung dapat dilihat pada Rumus 2.1. dd = dm cos m (2.1) Keterangan: dd : jarak mendatar dm 2.1.3 Kesalahan Pengukuran : jarak miring m : sudut miring
a. Kesalahan sistematik alat
Kesalahan sistematik alat berupa kesalahan kolimasi horisontal dan vertikal. Kesalahan kolimasi horisontal terjadi jika garis bidik tidak berhimpit dengan sumbu datar teropong pada arah horizontal. Idealnya adalah selisih antara bacaan sudut horisontal biasa dan bacaan luar biasa yang tidak sama dengan 1800. Sedangkan salah kolimasi vertikal terjadi jika garis bidik tidak berhimpit dengan sumbu datar teropong pada arah vertikal. Idealnya adalah jumlah bacaan sudut vertikal biasa dan luar biasa adalah 3600
b. Kesalahan akibat keadaan alam .
Kesalahan yang idsebabkan oleh alam adalah sebagai berikut: • karena lengkungnya permukaan bumi
• karena melengkungnya sinar cahaya (refraksi) • karena getaran udara
• karena perubahan arah garis nivo c. Kesalahan akibat si pengukur sendiri
Kesalahan-kesalahan yang disebabkan oleh pengukur adalah sebagai berikut:
14 • kesalahan pada mata
• kesalahan pada pembacaan • kesalahan yang kasar
Oleh karena itu, untuk menghitung ketelitian pengukuran sudut horisontal di lapangan, dapat digunakan Rumus 2.1 sedangkan untuk menghitung ketelitian pengukuran jarak horisontal dapat dilihat pada Rumus 2.2.
𝜎𝜎𝛼𝛼 = �𝜎𝜎𝛼𝛼𝑝𝑝𝑝𝑝2+ 𝜎𝜎"𝛼𝛼𝑡𝑡2+ 𝜎𝜎"𝛼𝛼𝑖𝑖2 (2.2)
Keterangan: σα
σ
: ketelitian pengukuran sudut horisontal (satuan detik)
αpr : ketelitian pembacaan dan pembidikan alat = 𝜎𝜎𝛼𝛼𝑝𝑝𝑝𝑝 =2𝜎𝜎𝐷𝐷𝐷𝐷𝐷𝐷
√𝑛𝑛 (satuan detik) σαpr : ketelitian pembidikan dan pembacaan alat (satuan detik)
σDIN
𝜎𝜎"𝛼𝛼𝑡𝑡 : ketelitian centering target = 𝜎𝜎"𝛼𝛼𝑡𝑡 =
�𝐷𝐷12+𝐷𝐷22
𝐷𝐷1𝐷𝐷2 𝜎𝜎𝑡𝑡 𝜌𝜌 (satuan detik) σ”
: ketelitian alat pada total station (satuan detik)
αt : ketelitian centering target (satuan detik)
D1 dan D2 : jarak dari tempat alat yang berbeda ke target yang sama (satuan
panjang) σt
𝜎𝜎"𝛼𝛼𝑖𝑖 : ketelitian centering alat = 𝜎𝜎"𝛼𝛼𝑖𝑖 = 𝐷𝐷3
𝐷𝐷1𝐷𝐷2√2𝜎𝜎𝑖𝑖 𝜌𝜌 (satuan detik) σ”
: ketelitian mata saat centering target (satuan panjang)
αi
D
: ketelitian centering alat (satuan detik)
3
σ
: �𝐷𝐷12+ 𝐷𝐷22− 2𝐷𝐷1𝐷𝐷2𝑐𝑐𝑐𝑐𝑐𝑐𝛽𝛽12 (satuan detik)
15 ρ : 206264,8”
𝜎𝜎𝑑𝑑 = �𝜎𝜎𝑖𝑖2+ 𝜎𝜎𝑡𝑡2+ 𝑎𝑎 + (𝐷𝐷 × 𝑏𝑏 𝑝𝑝𝑝𝑝𝑚𝑚)2 (2.3) Keterangan :
σd : ketelitian pengukuran jarak (satuan panjang)
σi : ketelitian bidikan pada saat centering alat (satuan panjang)
σt : ketelitian bidikan pada saat centering target (satuan panjang)
a dan b = spesifikasi parameter ketelitian alat (satuan panjang)
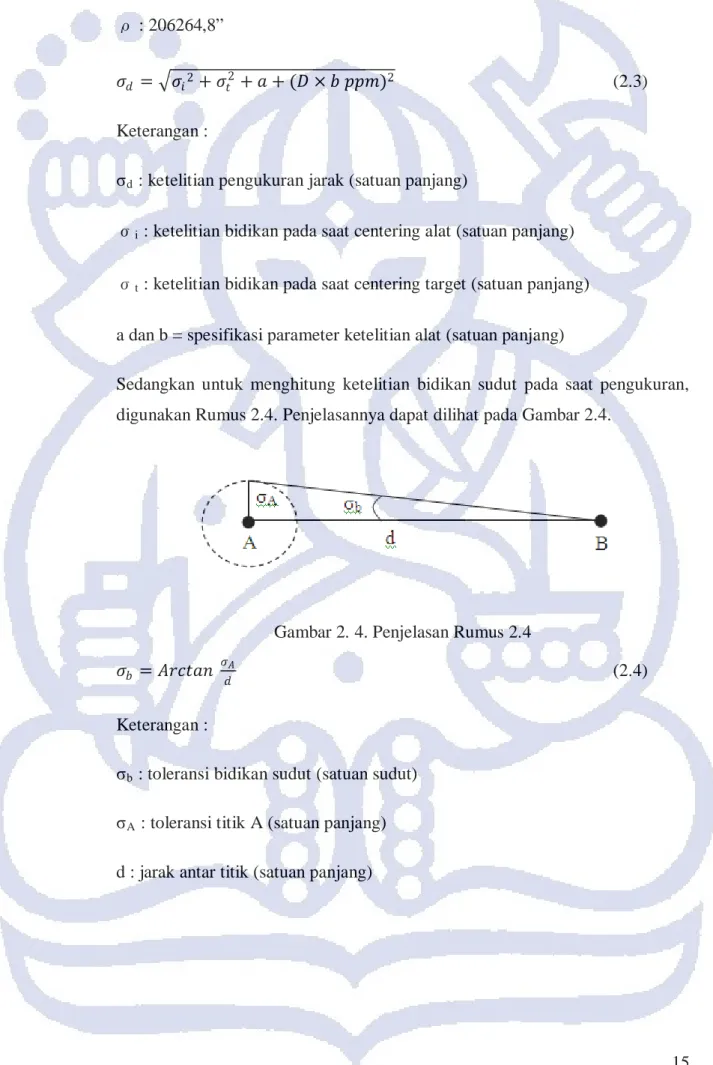
Sedangkan untuk menghitung ketelitian bidikan sudut pada saat pengukuran, digunakan Rumus 2.4. Penjelasannya dapat dilihat pada Gambar 2.4.
Gambar 2. 4. Penjelasan Rumus 2.4
𝜎𝜎𝑏𝑏 = 𝐴𝐴𝑝𝑝𝑐𝑐𝑡𝑡𝑎𝑎𝑛𝑛 𝜎𝜎𝑑𝑑𝐴𝐴 (2.4)
Keterangan :
σb : toleransi bidikan sudut (satuan sudut)
σA : toleransi titik A (satuan panjang)
16
2.3 Konsep Penentuan Posisi 2.3.1 Dasar Penentuan Posisi
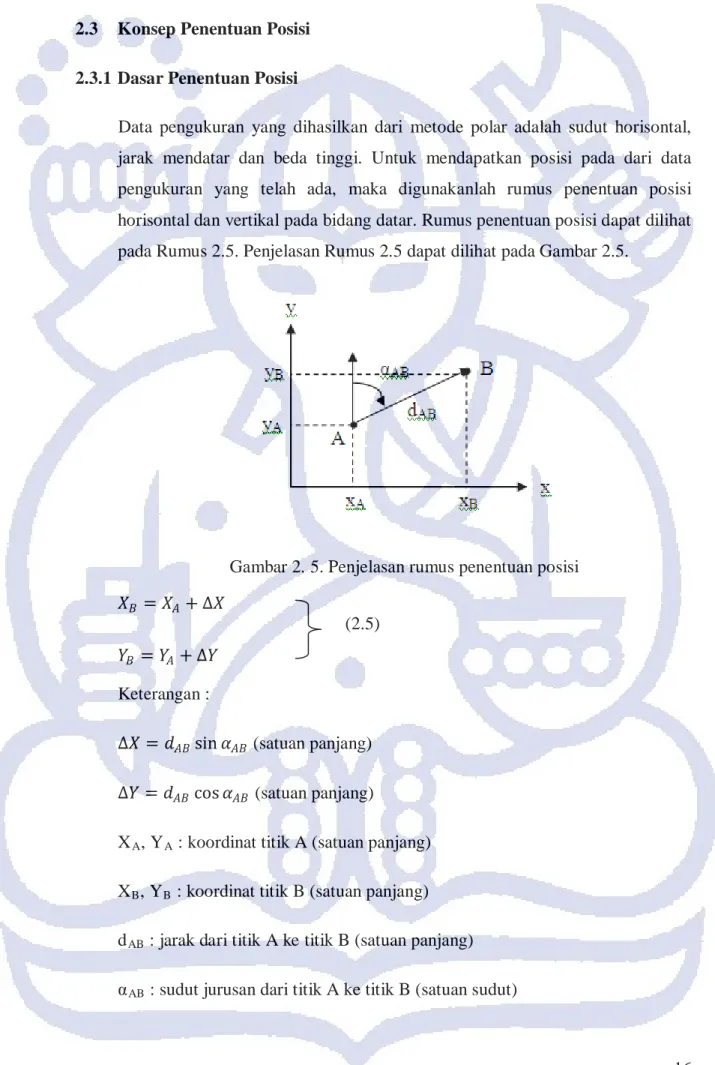
Data pengukuran yang dihasilkan dari metode polar adalah sudut horisontal, jarak mendatar dan beda tinggi. Untuk mendapatkan posisi pada dari data pengukuran yang telah ada, maka digunakanlah rumus penentuan posisi horisontal dan vertikal pada bidang datar. Rumus penentuan posisi dapat dilihat pada Rumus 2.5. Penjelasan Rumus 2.5 dapat dilihat pada Gambar 2.5.
Gambar 2. 5. Penjelasan rumus penentuan posisi 𝑋𝑋𝐵𝐵 = 𝑋𝑋𝐴𝐴 + ∆𝑋𝑋
(2.5)
𝑌𝑌𝐵𝐵 = 𝑌𝑌𝐴𝐴+ ∆𝑌𝑌 Keterangan :
∆𝑋𝑋 = 𝑑𝑑𝐴𝐴𝐵𝐵sin 𝛼𝛼𝐴𝐴𝐵𝐵 (satuan panjang) ∆𝑌𝑌 = 𝑑𝑑𝐴𝐴𝐵𝐵 cos 𝛼𝛼𝐴𝐴𝐵𝐵 (satuan panjang)
XA, YA : koordinat titik A (satuan panjang)
XB, YB : koordinat titik B (satuan panjang)
dAB : jarak dari titik A ke titik B (satuan panjang)
17
2.3.2 Hubungan sudut dan sudut jurusan
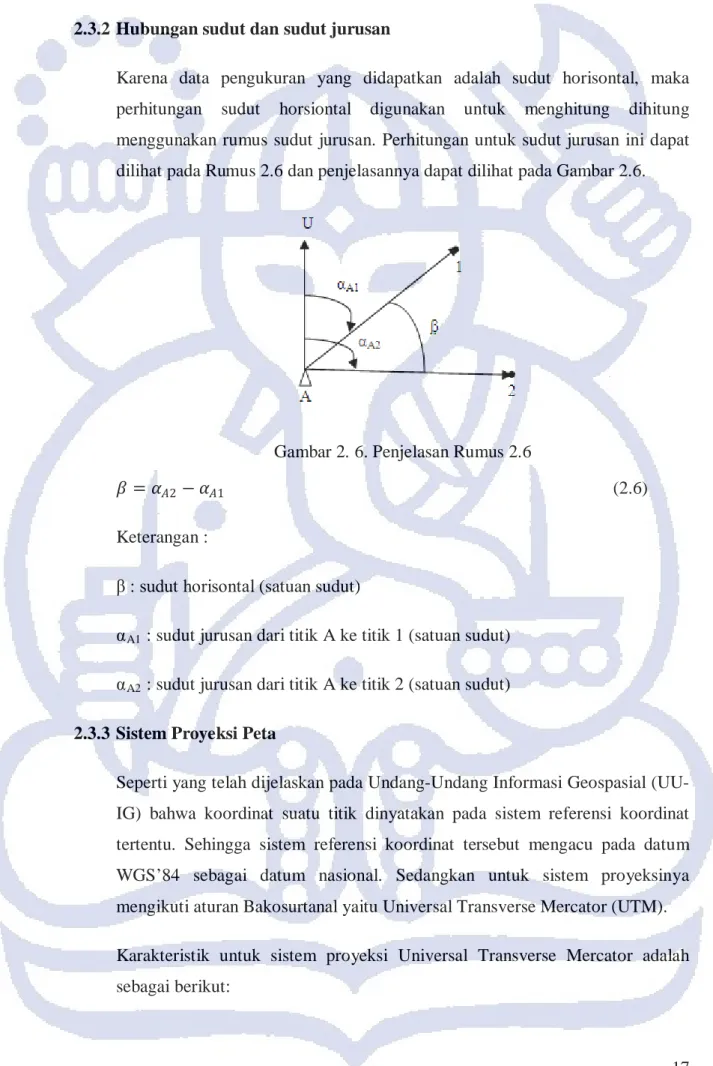
Karena data pengukuran yang didapatkan adalah sudut horisontal, maka perhitungan sudut horsiontal digunakan untuk menghitung dihitung menggunakan rumus sudut jurusan. Perhitungan untuk sudut jurusan ini dapat dilihat pada Rumus 2.6 dan penjelasannya dapat dilihat pada Gambar 2.6.
Gambar 2. 6. Penjelasan Rumus 2.6
𝛽𝛽 = 𝛼𝛼𝐴𝐴2 − 𝛼𝛼𝐴𝐴1 (2.6)
Keterangan :
β : sudut horisontal (satuan sudut)
αA1 : sudut jurusan dari titik A ke titik 1 (satuan sudut)
αA2
2.3.3 Sistem Proyeksi Peta
: sudut jurusan dari titik A ke titik 2 (satuan sudut)
Seperti yang telah dijelaskan pada Undang-Undang Informasi Geospasial (UU-IG) bahwa koordinat suatu titik dinyatakan pada sistem referensi koordinat tertentu. Sehingga sistem referensi koordinat tersebut mengacu pada datum WGS’84 sebagai datum nasional. Sedangkan untuk sistem proyeksinya mengikuti aturan Bakosurtanal yaitu Universal Transverse Mercator (UTM). Karakteristik untuk sistem proyeksi Universal Transverse Mercator adalah sebagai berikut:
18 • Proyeksi peta menggunakan silinder transversal.
• Lebar zona proyeksi adalah sebesar 60
• Faktor perbesaran pada meridian sentral adalah sebesar 0,9996 .
• Faktor perbesaran pada meridian zona (tepi) adalah sebesar 1,0004
Sedangkan untuk menyatakan koordinat titik acuan yang biasanya dinyatakan dalam sistem koordinat geodetik, diperlukan konversi dari sistem koordinat geodetik ke sistem koordinat proyeksi Universal Transverse Mercator (UTM). Oleh karena itu, data ukuran berupa jarak mendatar harus direduksi ke bidang proyeksi yaitu Universal Transverse Mercator (UTM) dengan mereduksi ke bidang ellipsoid referensi yang digunakan terlebih dahulu. Sehingga diperlukan penentuan faktor perbesaran skala terlebih dahulu untuk menghitung jarak pengukuran yang didapatkan.
Selain itu, perhitungan azimuth yang didapatkan dari perhitungan sudut horisontal pengukuran dan azimuth pada titik acuan, perlu direduksi menggunakan koreksi konvergensi meridian dan koreksi kelengkungan bumi untuk mendapatkan sudut jurusan pada bidang proyeksi Universal Transverse Mercator (UTM).
2.4 Konsep Perambatan Kesalahan 2.4.1 Konsep Dasar
Konsep hitungan perambatan kesalahan tidak lepas dari pengolahan data ukuran. Semua pengukuran memiliki kesalahan. Contohnya pengukuran sudut, sumber kesalahan utamanya adalah penempatan alat dan leveling, penempatan target, pembacaan skala lingkaran, dan pembidikan target. Untuk menganalisis kesalahan pengukuran sudut horisontal dan jarak, serta beda tinggi diperlukan perambatan kesalahan.
Jika terdapat suatu fungsi Z, dengan beberapa parameter yang melibatkan n yang tidak berkaitan dengan jumlah, x1, x2, x3, … xn, Rumus perambatan
19 𝜎𝜎𝑍𝑍 = ��𝜕𝜕𝑥𝑥𝜕𝜕𝑍𝑍1� 2 𝜎𝜎𝑥𝑥12+ � 𝜕𝜕𝑍𝑍 𝜕𝜕𝑥𝑥2� 2 𝜎𝜎𝑥𝑥22+ ⋯ + � 𝜕𝜕𝑍𝑍 𝜕𝜕𝑥𝑥𝑛𝑛� 2 𝜎𝜎𝑥𝑥𝑛𝑛2 (2.7) Keterangan :
σz : simpangan baku fungsi Z
σx1, σx2, …, σxn : simpangan baku parameter x1, x2, …, x 2.4.2 Contoh Penerapan Pada Posisi
n
Contoh penerapan perambatan kesalahan pada posisi adalah dengan mendapatkan ketelitian posisi. Contoh ini merupakan penerapan konsep perambatan kesalahan menggunakan fungsi pada Rumus 2.4. Sehingga rumus perambatan kesalahannya adalah terdapat pada Rumus 2.8.
𝜎𝜎𝑋𝑋𝐵𝐵2 = 𝜎𝜎𝑋𝑋𝐴𝐴2 + �𝜕𝜕𝛼𝛼𝐴𝐴𝐵𝐵𝜕𝜕𝑋𝑋𝐵𝐵 � 2 𝜎𝜎𝛼𝛼𝐴𝐴𝐵𝐵2+ �𝜕𝜕𝑑𝑑𝐴𝐴𝐵𝐵𝜕𝜕𝑋𝑋𝐵𝐵 � 2 𝜎𝜎𝑑𝑑𝐴𝐴𝐵𝐵2 (2.8) 𝜎𝜎𝑌𝑌𝐵𝐵2 = 𝜎𝜎𝑌𝑌𝐴𝐴2+ �𝜕𝜕𝛼𝛼𝐴𝐴𝐵𝐵𝜕𝜕𝑌𝑌𝐵𝐵 � 2 𝜎𝜎𝛼𝛼𝐴𝐴𝐵𝐵2+ �𝜕𝜕𝑑𝑑𝐴𝐴𝐵𝐵𝜕𝜕𝑌𝑌𝐵𝐵 � 2 𝜎𝜎𝑑𝑑𝐴𝐴𝐵𝐵2 Keterangan : σXB : ketelitian XB σYB : ketelitian YB σXA : ketelitian XA σYA : ketelitian YA
σαAB : ketelitian sudut jurusan AB
σdAB
2.4.3 Contoh Penerapan Pada Pengukuran
: ketelitian jarak mendatar dari A ke B
Contoh penerapan perambatan kesalahan pada pengukuran adalah dengan mendapatkan ketelitian pengukuran sudut horisontal. Contoh ini merupakan penerapan konsep perambatan kesalahan menggunakan fungsi pada Rumus 2.9.
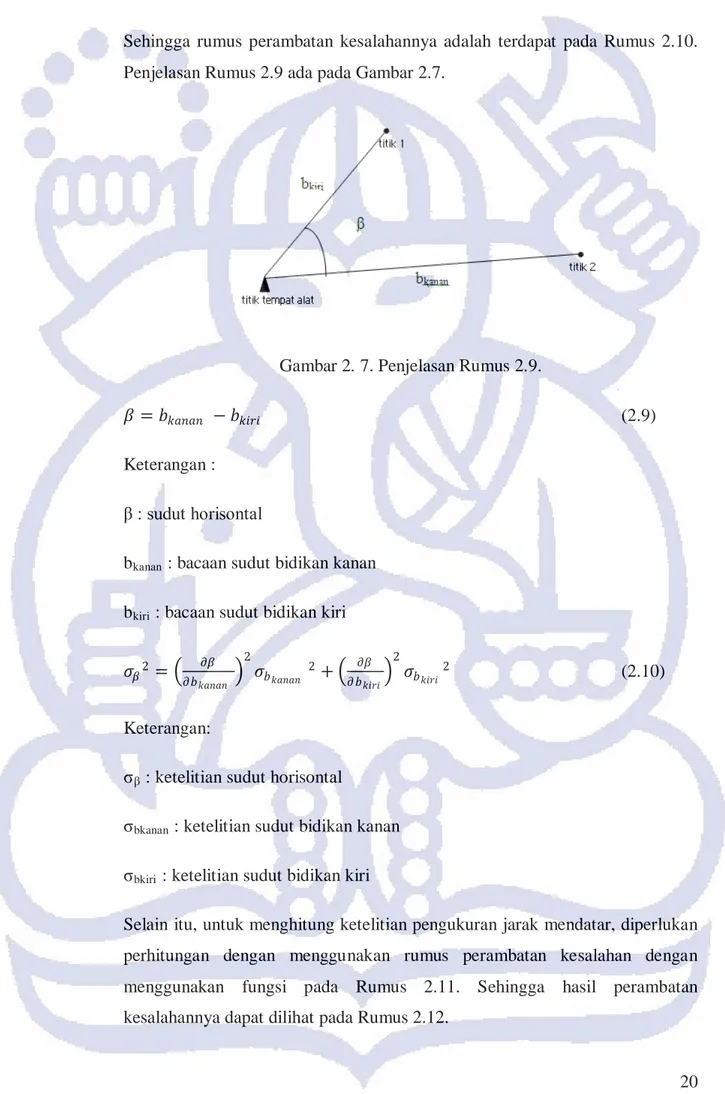
20 Sehingga rumus perambatan kesalahannya adalah terdapat pada Rumus 2.10. Penjelasan Rumus 2.9 ada pada Gambar 2.7.
Gambar 2. 7. Penjelasan Rumus 2.9.
𝛽𝛽 = 𝑏𝑏𝑘𝑘𝑎𝑎𝑛𝑛𝑎𝑎𝑛𝑛 − 𝑏𝑏𝑘𝑘𝑖𝑖𝑝𝑝𝑖𝑖 (2.9)
Keterangan : β : sudut horisontal
bkanan : bacaan sudut bidikan kanan
bkiri 𝜎𝜎𝛽𝛽2 = �𝜕𝜕𝑏𝑏𝑘𝑘𝑎𝑎𝑛𝑛𝑎𝑎𝑛𝑛𝜕𝜕𝛽𝛽 � 2 𝜎𝜎𝑏𝑏𝑘𝑘𝑎𝑎𝑛𝑛𝑎𝑎𝑛𝑛 2+ � 𝜕𝜕𝛽𝛽 𝜕𝜕𝑏𝑏𝑘𝑘𝑖𝑖𝑝𝑝𝑖𝑖� 2 𝜎𝜎𝑏𝑏𝑘𝑘𝑖𝑖𝑝𝑝𝑖𝑖2 (2.10) Keterangan: σ
: bacaan sudut bidikan kiri
β : ketelitian sudut horisontal
σbkanan : ketelitian sudut bidikan kanan
σbkiri : ketelitian sudut bidikan kiri
Selain itu, untuk menghitung ketelitian pengukuran jarak mendatar, diperlukan perhitungan dengan menggunakan rumus perambatan kesalahan dengan menggunakan fungsi pada Rumus 2.11. Sehingga hasil perambatan kesalahannya dapat dilihat pada Rumus 2.12.
21 𝑑𝑑𝑚𝑚𝑚𝑚𝑛𝑛𝑑𝑑𝑎𝑎𝑡𝑡𝑎𝑎𝑝𝑝 = 𝑑𝑑𝑚𝑚𝑖𝑖𝑝𝑝𝑖𝑖𝑛𝑛𝑚𝑚 cos <𝑚𝑚𝑖𝑖𝑝𝑝𝑖𝑖𝑛𝑛𝑚𝑚 (2.11) Keterangan :
dmendatar : jarak mendatar
dmiring : jarak miring
<miring 𝜎𝜎𝑑𝑑𝑚𝑚𝑚𝑚𝑛𝑛𝑑𝑑𝑎𝑎𝑡𝑡𝑎𝑎𝑝𝑝 2 = �𝜕𝜕𝑑𝑑𝜕𝜕𝑑𝑑𝑚𝑚𝑚𝑚𝑛𝑛𝑑𝑑𝑎𝑎𝑡𝑡𝑎𝑎𝑝𝑝 𝑚𝑚𝑖𝑖𝑝𝑝𝑖𝑖𝑛𝑛𝑚𝑚 � 2 𝜎𝜎𝑑𝑑𝑚𝑚𝑖𝑖𝑝𝑝𝑖𝑖𝑛𝑛𝑚𝑚 2+ � 𝜕𝜕<𝑚𝑚𝑚𝑚𝑛𝑛𝑑𝑑𝑎𝑎𝑡𝑡𝑎𝑎𝑝𝑝 𝜕𝜕<𝑚𝑚𝑖𝑖𝑝𝑝𝑖𝑖𝑛𝑛𝑚𝑚 � 2 𝜎𝜎<𝑚𝑚𝑖𝑖𝑝𝑝𝑖𝑖𝑛𝑛𝑚𝑚 2 (2.12) Keterangan: σ : sudut miring
dmendatar : ketelitian pengukuran jarak mendatar
σdmiring : ketelitian pengukuran jarak mirinh
σ<miring
2.5 Analisis Visual Kartografi
: ketelitian pengukuran sudut miring
Analisis visual kartografi merupakan salah satu metode untuk menentukan toleransi titik detail di lapangan. Metode ini menggunakan skala peta, penggaris, dan syarat kartografi. Syarat kartografi yang dimaksud yaitu untuk menentukan jarak di lapangan dari jarak yang ada di peta dengan skala tertentu. Jarak di lapangan dapat ditentukan menggunakan Rumus 2.13.
𝐽𝐽𝑎𝑎𝑝𝑝𝑎𝑎𝑘𝑘 𝑑𝑑𝑖𝑖 𝑙𝑙𝑎𝑎𝑝𝑝𝑎𝑎𝑛𝑛𝑚𝑚𝑎𝑎𝑛𝑛 = 𝑗𝑗𝑎𝑎𝑝𝑝𝑎𝑎𝑘𝑘 𝑑𝑑𝑖𝑖 𝑝𝑝𝑚𝑚𝑡𝑡𝑎𝑎 × 𝑐𝑐𝑘𝑘𝑎𝑎𝑙𝑙𝑎𝑎 𝑝𝑝𝑚𝑚𝑡𝑡𝑎𝑎 (2.13) Penggaris sebagai alat pengukuran jarak pada peta memiliki satuan terkecil sebesar 1 mm. Sehingga, penggaris memiliki ketelitian pengukuran sebesar 0,5 mm (setengah dari satuan terkecil pada alat ukur). Dengan menggunakan ketelitian pengukuran tersebut kita dapat menentukan jarak terpendek di lapangan yang dapat terlihat pada peta. Jarak terpendek di lapangan ditentukan dari ketelitian pengukuran jarak di peta yaitu 0,5 mm. Jarak terpendek di lapangan tersebut ditentukan dengan menggunakan Rumus 2.13.
22 Jarak terpendek di lapangan tersebut merupakan toleransi antar titik detail di lapangan.
2.6 Konsep Hitung Perataan
Hitung perataan digunakan untuk mendapatkan koordinat pendekatan dan koordinat sebenarnya dari data pengukuran. Perhitungannya menggunakan Rumus 2.14.
AX – L = 0 (2.14)
Keterangan: A : matriks desain
X : matriks parameter hitungan (X = (ATPA)-1 AT
𝑣𝑣 = 𝐴𝐴𝑋𝑋 − 𝐿𝐿 (2.15) Keterangan : v : matriks residu A : matriks desain X : parameter hitungan (X = (A PL) P : matriks bobot L : matriks konstanta
Setelah mendapatkan koordinat pendekatan dan koordinat sebenarnya, untuk mendapatkan residu tiap titiknya, digunakanlah Rumus 2.15.
T
PA)-1 AT
Pada hitung perataan, untuk menentukan data pengukuran masuk ke selang kepercayaan tertentu, digunakanlah berbagai macam perhitungan distribusi.
PL) P : matriks bobot
23 Salah satunya adalah dengan menggunakan distribusi chi square yaitu dapat dilihat pada Rumus 2.16.
𝑋𝑋2 =𝑉𝑉2
𝜎𝜎2 (2.16)
Keterangan :
x2 : bilangan chi square v : residu