SEMINAR PROPOSAL PROYEK AKHIR
ELECTRONIC SPEED CONTROLLER UNTUK BRUSHLESS DC MOTOR DENGAN METODE PID
Oleh:
AHMAD RIFKI NRP. 1103131016
Pembimbing 1: Pembimbing 2:
Akhmad Hendriawan, S.T., M.T. Dr. EngBambang Sumantri S.T., M.Sc. NIP. 1975501272002121003 NIP. 19781210.200312.1.002
PROGRAM STUDI D3 TEKNIK ELEKTRONIKA DEPARTEMEN TEKNIK ELEKTRO
SEMINAR PROPOSAL PROYEK AKHIR
Judul :
ELECTRONIC SPEED CONTROLLER UNTUK BRUSHLESS DC MOTOR DENGAN METODE PID
Oleh : AHMAD RIFKI NRP. 1103131016
Telah diseminarkan dan disahkan menjadi Proyek Akhir (PA) di
Program Studi D3 Teknik Elektronika, Departemen Teknik Elektro, Politeknik Elektronika Negeri Surabaya,
pada tanggal _________ 2016 Disetujui Oleh:
Mengetahui
Ketua Program Studi D3 Teknik Elektronika
Ir. Moch. Rochmad, M.T. NIP. 19620304.1991.03.1.002
Dosen Pembimbing PA:
1. Akhmad Hendriawan S.T., M.T. NIP. 1975501272002121003
2. Bambang Sumantri S.T., M.Sc. . NIP. 19781210.200312.1.002 Dosen Penguji TPPA :
1. ……….. NIP.
I. JUDUL PROYEK AKHIR
ELECTRONIC SPEED CONTROLLER UNTUK BRUSHLESS DC MOTOR DENGAN METODE PID
II. PENDAHULUAN
Seiring dengan perkembangan jaman, kebutuhan akan sistem penggerak menggunakan motor listrik secara efisien dan torsi yang tinggi serta perawatan yang murah semakin meningkat. Akan tetapi motor yang sering digunakan saat ini yaitu motor induksi, motor DC/AC belum mampu untuk memenuhi kebutuhan tersebut.
Motor BLDC merupakan suatu motor synchronous 3 fasa yang memiliki karakteristik mumpuni untuk memenuhi kebutuhun tersebut. Bidang yang saya amati adalah kontrol motor brushless direct current (BLDC). Selama ini pengaplikasian motor brushless DC dalam ilmu robotika maupun kedirgantaraan misalnya: multicopter dll terdapat beberapa kendala maupun kelemahan yang dapat berakibat fatal apabila tidak segera diatasi. Diantaranya masalah kecepatan motor yang tidak konstan akibat pergantian beban (misalkan: propeller), arah putaran motor yang salah sehingga berakibat fatal apabila diaplikasikan pada pesawat sebagai contoh kegagalan salah satu tim dirgantara PENS dalam kontes robot terbang Indonesia tahun 2014.
Untuk mengatasi hal-hal tersebut diperlukan suatu alat yaitu esc (electronic speed controller) dan beberapa fitur tambahan. Selama ini esc yang terdapat di pasaran belum terdapat monitoring arah putaran motor, pengaturan kecepatan motor agar konstan meskipun tanpa beban maupun dengan beban (propeller) yang dipakai berubah-ubah, dan serial port communication. Maka dari itu, saya membuat esc dengan penambahan fitur dan beberapa metode penyelesaian diantaranya PID controller untuk mengatasi masalah kecepatan motor brushless DC, Back EMF sensorless brushless DC Motor untuk mengetahui kecepatan dan arah putaran motor serta port serial komunikasi.
Dengan hal tersebut diharapkan mampu mengatasi masalah-masalah yang dihadapi oleh masyarakat, terutama bagi para pemula hobby aeromodeling sehingga dapat mencegah sejak dini segala bahaya yang disebabkan oleh penggunaan motor brushless DC.
Adapun permasalahan yang dibahas dalam proyek akhir ini, yaitu:
1. Menjaga kecepatan motor brushless DC agar tetap konstan meskipun besarnya beban (dalam penelitian ini menggunakan propeller) berubah-ubah..
2. Bagaimana cara membuat warning system jika putaran motor salah? 3. Bagaimana cara membalik putaran motor dengan penerapan metode
yang digunakan?
4. Bagaimana Integrasi antara hardware kontroller, software dan motor brushless DC.
5. Bagaimana membuat hardware, software yang sesuai dengan kebutuhan alat.
Adapun batasan-batasan masalah yang dibuat agar dalam pengerjaan proyek akhir ini dapat berjalan dengan baik dan tidak menyimpang adalah sebagai berikut:
1. Dalam penelitian, difokuskan pada perancangan dan pembuatan sistem kontrol motor brushless dc.
2. Motor brushless DC yang digunakan tidak jauh dari spesifikasi sebagai berikut:
- KV(RPM/V): 920-1200 - Lipo cells: 3-4s
- Dimensions (diameter x lebar): ±(27 x 23) mm
3. Pengujian berupa esc saja tanpa menggunakan perangkat sistem seperti mulicopter dll.
IV. TINJAUAN PUSTAKA
4.1 Brushless DC Motor (BLDC)
BLDC motor merupakan motor listrik synchronous AC 3 fasa yang memiliki kelebihan dibandingkan dengan motor DC biasa. BLDC memiliki biaya perawatan yang lebih rendah dan kecepatan lebih tinggi karena tidak menggunakan brush. BLDC memiliki BEMF (back EMF) berbentuk trapezoidal. Motor BLDC ini dapat dikendalikan dengan metode six-step maupun metode PWM sinusoidal.
4.2 Pengendalian BLDC
Secara umum, terdapat dua metode pengendalian BLDC yaitu metode six-step dan metode PWM sinusoidal.
Metode ini sering digunakan dalam pengendalian BLDC komersial karena sederhana dan mudah untuk diimplementasikan. Kelemahan dari metode ini memiliki rugi-rugi daya yang tinggi, arus rms yang tinggi, serta tingkat kebisingan tinggi. PWM yang digunakan dalam metode ini
merupakan PWM square dengan frekwensi tertentu sehingga menciptakan suatu gelombang AC berbentuk square.
4.2.2 Metode PWM Sinusoidal
Metode ini memiliki arus rms kecil dibandingkan metode six-step sehingga rugi-rugi daya yang timbul lebih kecil. Hal ini karena metode PWM sinusoidal akan menghasilkan gelombang sinus yang besarnya arus berubah tehadap waktu sedangkan PWM six-step menghasilkan sinyal square atau trapezoidal, nilainya sebagian besar tetap setiap waktu. 4.3 Metode Pendeteksi Perubahan Komutasi
Agar BLDC dapat dikendalikan dengan baik (kecepatan dan torsi konstan), diperlukan adanya suatu timing yang tepat. Timing perubahan komutasi yang tidak tetap akan mengakibatkan slip sehingga kecepatan dan torsi motor tidak konstan. Apabila terjadi slip saat kecepatan tinggi
kecepatan motor akan cenderung turun bahkan kemungkinan motor berhenti berputar. Untuk menentukan perubahan komutasi, maka terdapat dua metode yaitu sersorless (back EMF) dan dengan menggunakan sensor (contohnya hall effect). Kedua metode ini memiliki kelebihan dan kelemahan masing-masing.
4.4 Sensor hall
Salah satu menentukan timing yang tepat adalah menggunakan 3 buah sensor hall. Pada umumnya ketiga sensor hall terpisah 120 derajat antara satu dengan yang lainnya.
5.1 Tujuan
Tujuan dari pembuatan alat ini adalah sebagai berikut :
1. Merancang dan membuat suatu alat yang mampu membantu masyarakat dalam hal keamanan dan optimalisasi pengunaan motor brushless dc.
2. Mengimplementasikan metode six-step untuk mengendalikan kecepatan BLDC dengan mikrokontroller AVR dan back EMF / Hall effect sebagai feedback dalam menentukan timing perubahan komutasi.
3. Penambahan metode dan fitur dari alat yang sudah ada. 5.2 Manfaat
Bagi Masyarakat/Pengguna
Program ini dapat mengatasi masalah yang dihadapi masyarakat salah satunya para hobby aeromodelling dalam penggunaan motor brushless dc.
Bagi mahasiswa:
Program ini dapat meningkatkan kreatifitas mahasiswa dalam pengembangan teknologi yang dapat berguna bagi masyarakat sehingga fungsi mahasiswa dalam tri darma perguruan tinggi dapat tercapai.
VI. KONTRIBUSI PROYEK AKHIR
VII. METODE PROYEK AKHIR
Gambar 1. Metodologi Pelaksanaan 7.1 Studi Literatur
Merupakan tahapan pengumpulan data dan studi jurnal serta penelitian-penelitian yang mendukung proyek akhir . Berikut merupakan studi literature yang dilakukan:
a. Metode kontrol kecepatan BLDC motor b. Hardware yang mendukung sebagai controller. 7.2 Perancangan dan Pembuatan Alat
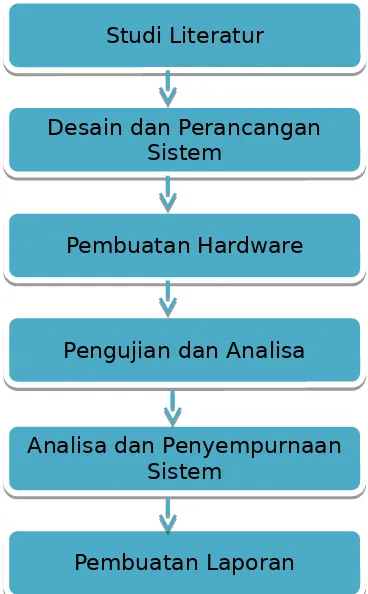
Studi Literatur Studi Literatur
Desain dan Perancangan Sistem
Desain dan Perancangan Sistem
Pembuatan Hardware Pembuatan Hardware
Pengujian dan Analisa Pengujian dan Analisa
Analisa dan Penyempurnaan Sistem
Gambar 2. Diagram Sistem
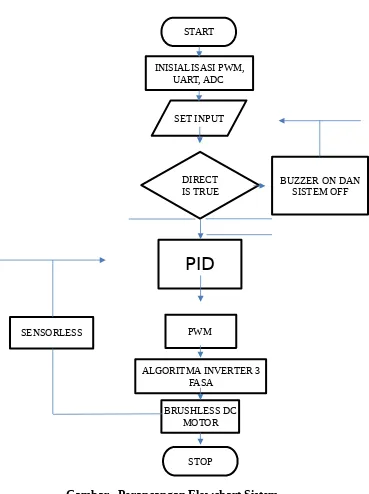
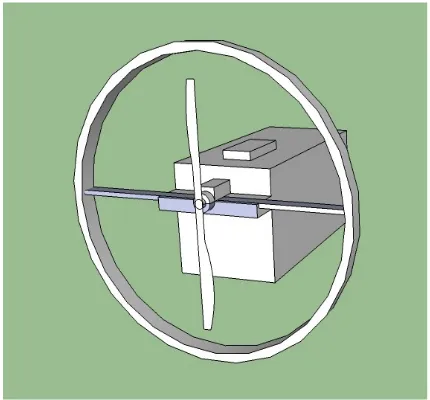
Gambar . Perancangan Flowchart Sistem Gambar 3. Perkiraan Desain Alat
START
INISIALISASI PWM, UART, ADC
SET INPUT
PWM DIRECT IS TRUE
ALGORITMA INVERTER 3 FASA
BRUSHLESS DC MOTOR
STOP
BUZZER ON DAN SISTEM OFF
PID
7.3 Pengujian alat
Pengujian alat dilakukan untuk menetukan keandalan dari sistem yang telah dirancang. Pengujian hardware, software apakah sesuai dengan yang diharapkan dan melakukan perbaikan apabila terdapat kesalahan.
7.4 Analisis
Analisis dilakukan terhadap hasil dari pengujian sehingga dapat ditentukan karakteristik dari sistem. Dengan demikian dapat dilakukan lagi penyempurnaan terhadap alat yang telah diciptakan sehingga dapat berfungsi optimal bagi masyarakat yang menggunakan.
7.5 Pembuatan Laporan Akhir
Pada tahap ini dilakukan pembuatan laporan kegiatan berdasarkan data data yang telah diperoleh dari awal proses pembuatan alat hingga pengujian alat dan analisa.
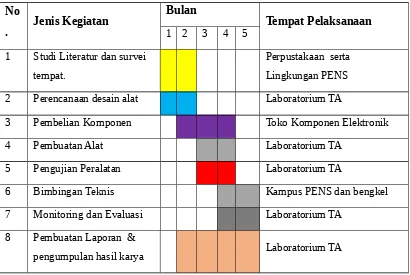
VIII. JADWAL PELAKSANAAN
Kegiatan PA ini akan berlangsung selama kurang lebih 5 bulan penuh. Jadwal pelaksanaan kegiatan proyek akhir yang meliputi kegiatan-kegiatan persiapan, perencanaan, implementasi dan penyusunan laporan proyek akhir disusun sebagai berikut:
No
. Jenis Kegiatan
Bulan
Tempat Pelaksanaan
1 2 3 4 5
1 Studi Literatur dan survei tempat.
Perpustakaan serta Lingkungan PENS
2 Perencanaan desain alat Laboratorium TA
3 Pembelian Komponen Toko Komponen Elektronik
4 Pembuatan Alat Laboratorium TA
5 Pengujian Peralatan Laboratorium TA
6 Bimbingan Teknis Kampus PENS dan bengkel
7 Monitoring dan Evaluasi Laboratorium TA
8 Pembuatan Laporan &
pengumpulan hasil karya Laboratorium TA
IX. PERSONALIA PROYEK AKHIR Data Mahasiswa
Nama Mahasiswa : Ahmad Rifki
NRP : 1103131016
Departeman : Teknik Elektro
Program Studi : D3 Teknik Elektronika
Data Dosen Pembimbing I
Nama : Akhmad Hendriawan S.T., M.T.
NIP : 1975501272002121003
Departemen : Teknik Elektro
Program Studi : Teknik Elektronika
Jabatan Fungsional : Staff Pengajar
Data Dosen Pembimbing II
Nama : Bambang Sumantri S.T., M.Sc.
NIP : 19781210.200312.1.002
Departemen : Teknik Elektro
Program Studi : Teknik Elektronika
Jabatan Fungsional : Staff Pengajar
X. PERKIRAAN BIAYA PROYEK AKHIR
biaya(Rp)
XI. DAFTAR PUSTAKA
[1] Mavilor Infranor Group Company. November 2004. Geometry on Hall Sensor